基于stm32和富斯遙控器的SBUS波形分析和通訊實作
- 簡介
- 軟體環境和硬體搭建
- 軟體環境
- 硬體搭建:
- SBUS協議
- SBUS協議
- SBUS波形分析
- 程式部分
- 程式流程
- 核心程式
- 總結
簡介
最近一個小專案用到了富斯的遙控器(使用的SBUS協議),目的是實作通過遙控器的各個通道對小車進行簡單控制(移動、燈光、不同作業模式等),一點小經驗和大家分享下,SBUS網上的資料很多,本篇更偏向于新人對SBUS的快速理解和直接應用,對一些不太常用的細則不再進行介紹,
因為是第一次使用SBUS協議,根據個人習慣在學習通訊協議時喜歡對照著實際波形理解,如果有朋友對硬體有簡單了解,建議接觸新的通訊協議時也用示波器配合實際波形來學習,能發現很多細節,當然這個不是必須的,僅是個人建議而已,實際波形我也會貼出供感興趣的朋友參考,
其他細節如有疏漏還請各位指出,共同進步,
軟體環境和硬體搭建
軟體環境
編譯軟體:KEIL MDK
庫:STM32標準庫
單片機I/O使用:PC11(串口USART4 RX端,TX端不接即可)
單片機外設使用:USART4(接收遙控資料)、TIM3(定時驗證資料正確性)
硬體搭建:
發射裝置:富斯遙控器FS-I6S
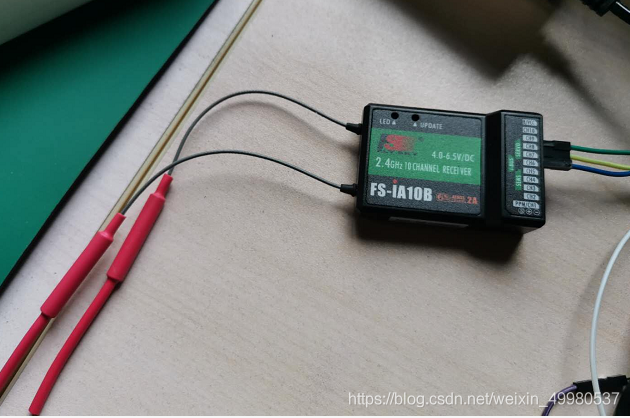
接收裝置:接識訓IA10B
MCU控制板:STM32F407電路板
外接電路:簡單的三極管反向電路(必須)
發射裝置和接收裝置之間只要是SBUS通訊方式,不同型號理論來說影響不大,程式可以通用,
因為只需要用到單片機的串口(為了驗證資料的正確性筆者多用了個定時器TIM3),所以只是實作通訊的話電路要求比較簡單,只要能正常作業并帶有串口外設的單片機板即可,比如某寶上賣的STM32F103最小系統板,
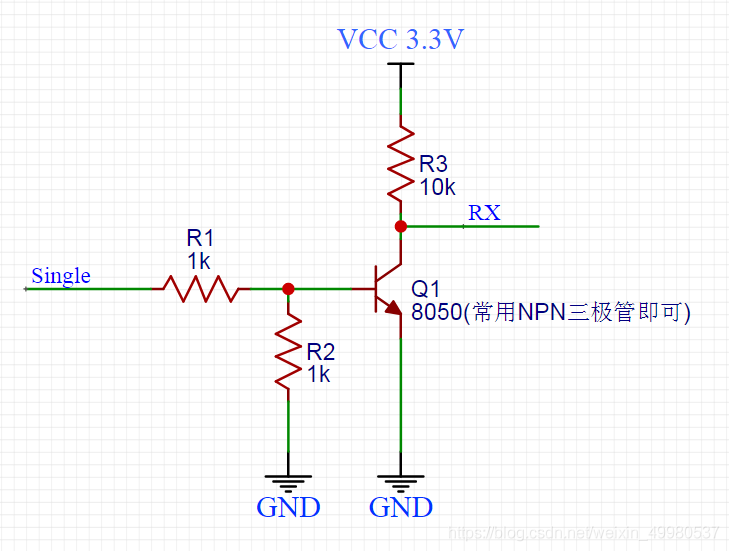
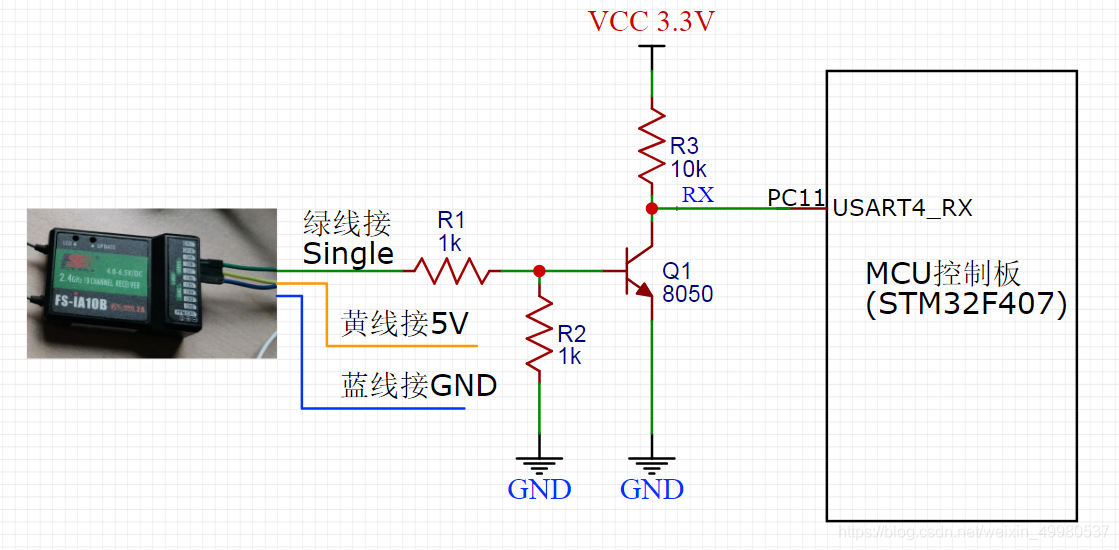
由于SBUS邏輯電平和常用的串口通訊極性剛好相反,所以需要搭建一個簡單的三極管反向電路,電路參考下圖,
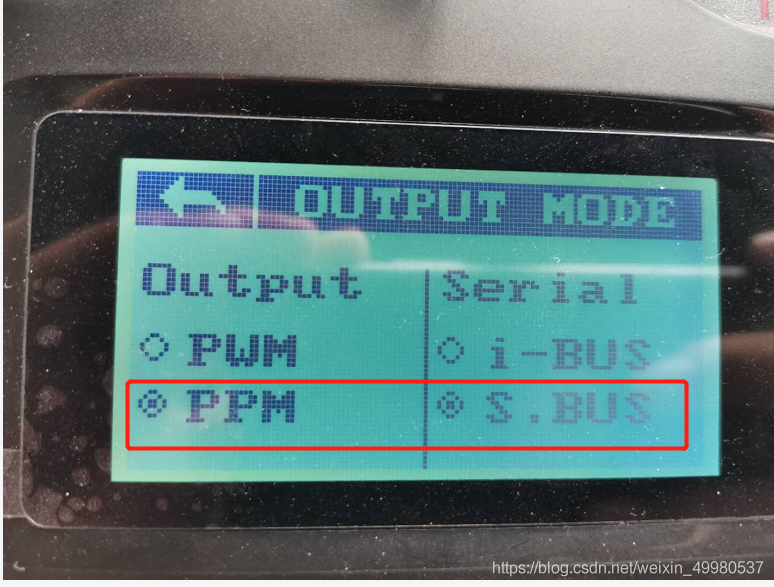
遙控器需要配置為SBUS輸出模式:
接識訓接線如下:
綠線為信號線-----接三極管反向電在這里插入圖片描述
路的輸入端(Single)
黃線為電源+線-----接5V電源
藍線為電源地線 -----接電源GND
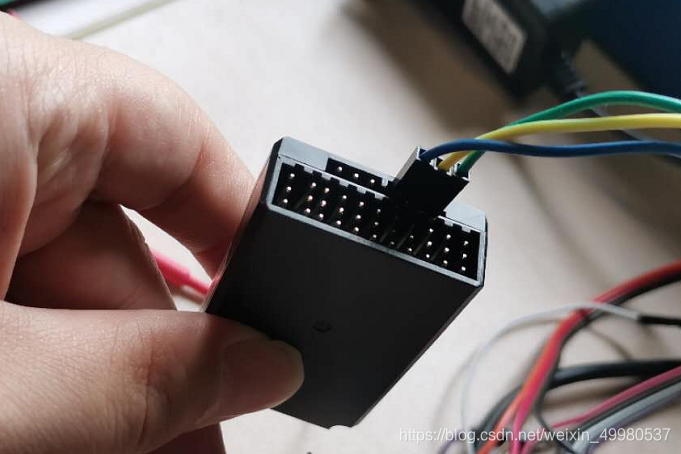 總體連接如下:
總體連接如下:
SBUS協議
SBUS協議
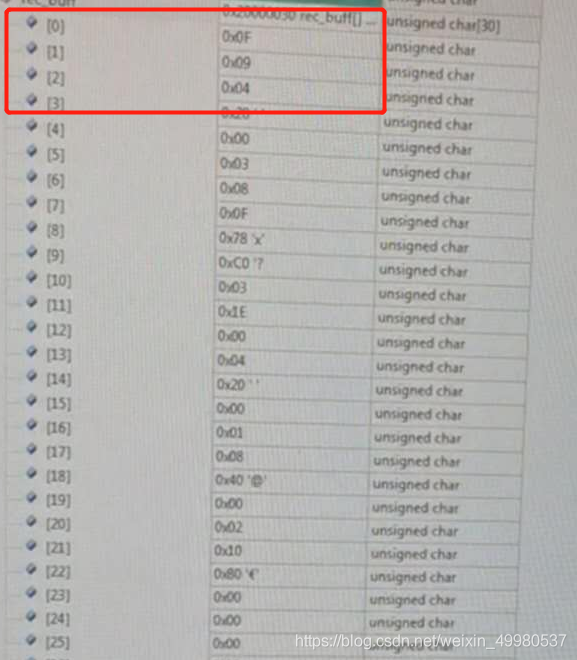
SBUS協議其實就是串口通訊(USART)的應用層協議,它的本質還是USART通訊,可以粗暴理解為一幀SBUS資料是由連續發送或接收25個位元組(即25次)的串口資料構成,第一個位元組固定為0x0F,最后一個位元組固定為0x00,中間23個位元組和起來構成了所需資料,所以使用它在程式上還是使用串口,只不過在串口配置上必須按照以下引數配置:
串口波特率為100000,資料位為8位,2個停止位,偶校驗,無硬體控流,
Sbus的編碼方式為每11位為一個資料,除去第一個位元組和第25個位元組,需要把中間23個位元組的常規8位資料合在一起,并按每11位為一組的格式進行決議處理,具體決議方法網上教程較多,不再贅述,如果不想了解具體決議方法,可直接參考下文的決議函式得出決議后的結果即可,
SBUS波形分析
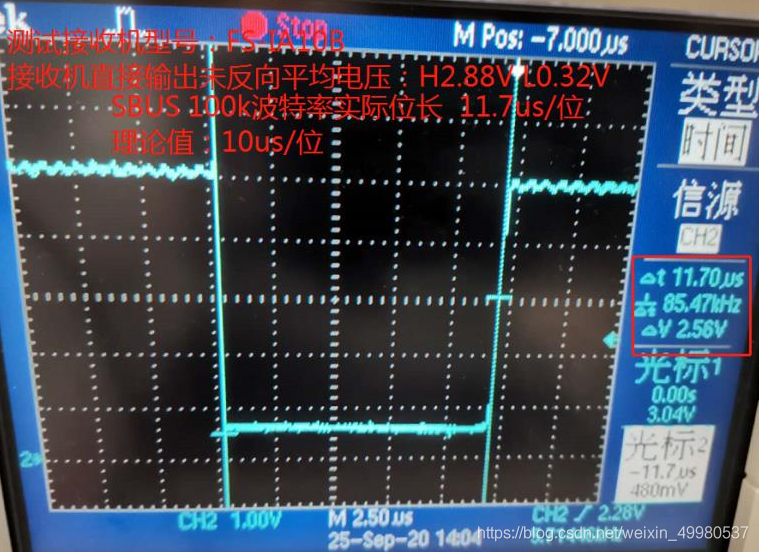
位長度:
SBUS的波特率固定為100K,所以每傳輸一位的時間為:1/100K=10us,
隨機用示波器抓取了一位,實測結果略微有誤差為11.7us,在接受范圍內,
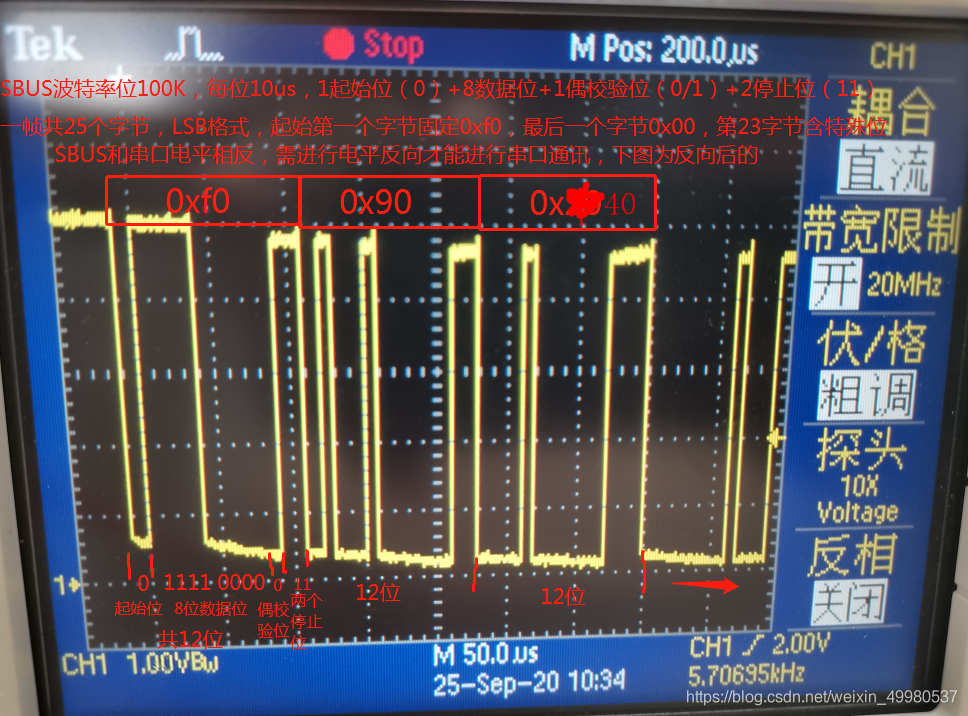
位元組長度:
SBUS一幀由25次串口接識訓發送構成(25個位元組),每次串口發送有12位組成:1個起始位+8個資料位+1個偶校驗位+2個停止位,下圖為截取一幀SBUS前幾個資料位元組波形,由于發送順序遵循LSB(低位優先)原則,所以需要注意每個位元組高位和低位的波形和實際結果顛倒的,如波形第一個位元組為0xF0,實際資料為0x0F,
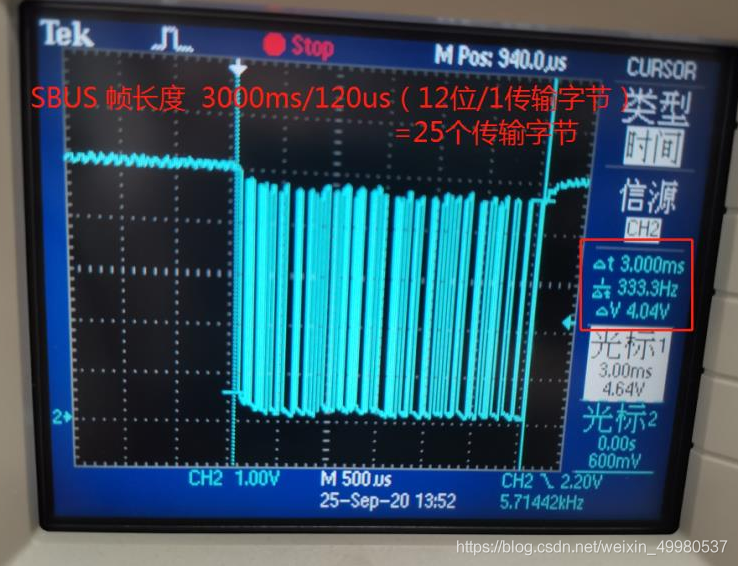
幀長度
SBUS一幀由25個位元組構成,每個位元組12位,每位長度10us,總長度=10us12位25個位元組=3000us(糾正:圖中3000us單位錯打成了3000ms),
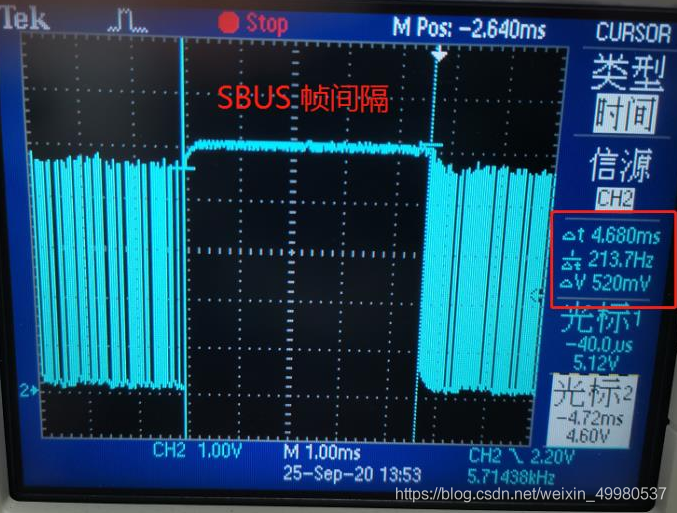
 幀間隔
幀間隔
SBUS兩幀間間隔約4.68ms,如果要求不能漏掉任何一幀,則需要注意其他程式處理時間必須在4.68ms內,不能影響一下幀的接收,
程式部分
程式流程
程式執行流程:上電-----配置外設(USART4、TIM3,默認使能都為關閉狀態,TIM3定時3ms)-----等待PC11出現持續一段時間的高電平后使能USART4,等待接收第一個位元組(等待的持續高電平即為兩幀間的高電平間隔部分,確保能從第一個位元組接收)-----當串口收到資料后使能TIM3-----當TIM3時間到后關閉TIM3和USART4判斷串口是否是剛好收到25個位元組-----是則執行決議函式,不是則為接收錯誤-----重新等待持續的高電平,
核心程式
程式是基于STM32F407的,如果是103可能在系統頭檔案名上報錯和USART配置時會有點小差別,
USART4配置及其中斷函式:
一定要注意因為有一個偶校驗位,資料長度要寫為9:
USART_InitStructure.USART_WordLength = USART_WordLength_9b,
中斷內的函式功能為:進中斷開TIM3定時器,把收到的串口資料進行保存,
#include "sys.h"
#include "usart.h"
u8 rec_buff[30]={0};
u8 rec_cnt=0;
extern u32 WaitRec_cnt;
void Uart4_Init(u32 bound){
//GPIO埠設定 PC10 PC11
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOC,ENABLE); //使能GPIOC時鐘
RCC_APB1PeriphClockCmd(RCC_APB1Periph_UART4,ENABLE); //使能USART1時鐘
//串口4對應引腳復用映射
GPIO_PinAFConfig(GPIOC,GPIO_PinSource10,GPIO_AF_UART4); //GPIOC10復用為USART4
GPIO_PinAFConfig(GPIOC,GPIO_PinSource11,GPIO_AF_UART4); //GPIOA11復用為USART4
//USART1埠配置
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10 | GPIO_Pin_11; //GPIOc10與GPIOc11
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;//復用功能
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //速度50MHz
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽復用輸出
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //上拉
GPIO_Init(GPIOC,&GPIO_InitStructure); //初始化C10 C11
//Usart1 NVIC 配置
NVIC_InitStructure.NVIC_IRQChannel = UART4_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3 ;//搶占優先級3
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //子優先級3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //根據指定的引數初始化VIC暫存器
//USART 初始化設定
USART_InitStructure.USART_BaudRate = bound;//串口波特率
USART_InitStructure.USART_WordLength = USART_WordLength_9b;//字長為8位資料格式
USART_InitStructure.USART_StopBits = USART_StopBits_2;//2個停止位
USART_InitStructure.USART_Parity = USART_Parity_Even;//偶校驗位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//無硬體資料流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收發模式
USART_Init(UART4, &USART_InitStructure); //初始化串口1
USART_ITConfig(UART4, USART_IT_RXNE, ENABLE);//開啟串口接受中斷
USART_Cmd(UART4, DISABLE); //使能串口1
}
void UART4_IRQHandler(void)
{
if(USART_GetITStatus(UART4, USART_IT_RXNE) != RESET)
{
rec_buff[rec_cnt]=UART4->DR;
rec_cnt++;
WaitRec_cnt=0;
TIM_Cmd(TIM3, ENABLE);
}
USART_ClearITPendingBit(UART4, USART_IT_RXNE);
}
TIM3配置及其中斷函式:
TIM3時間在實際應用時是3ms進定時器中斷,理論上3ms能剛好把一幀SBUS(25個位元組)接收完畢,因為是已經接收到第一個串口資料后才開的定時器,后續只會有24個位元組的時間,所以實際上定時器3ms時間還留有一個位元組的時間裕量,
TIM3的中斷函式功能:即為判斷串口是否正確接收了一幀SBUS(25個位元組)資料,是則進行資料決議函式SbusDataParsing(u8 buf[]) ;,不是則錯誤位RecErr_Flag+1,
#include "tim.h"
#include "usart.h"
#include "sbus.h"
u8 RecErr_Flag;
extern u8 rec_cnt;
u32 WaitRec_cnt;
extern u8 rec_buff[30];
void TIM3_Init(u16 arr,u16 psc)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //時鐘使能
TIM_DeInit(TIM3);
//定時器TIM3初始化
TIM_TimeBaseStructure.TIM_Period = arr; //設定在下一個更新事件裝入活動的自動重裝載暫存器周期的值
TIM_TimeBaseStructure.TIM_Prescaler =psc; //設定用來作為TIMx時鐘頻率除數的預分頻值
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; //設定時鐘分割:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上計數模式
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); //根據指定的引數初始化TIMx的時間基數單位
TIM_ClearITPendingBit(TIM3, TIM_IT_Update);
TIM_ITConfig(TIM3,TIM_IT_Update,ENABLE ); //使能指定的TIM3中斷,允許更新中斷
//中斷優先級NVIC設定
NVIC_InitStructure.NVIC_IRQChannel = TIM3_IRQn; //TIM3中斷
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2; //先占優先級0級
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 2; //從優先級3級
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道被使能
NVIC_Init(&NVIC_InitStructure); //初始化NVIC暫存器
TIM_Cmd(TIM3, DISABLE); //使能TIMx
}
void TIM3_IRQHandler(void) //TIM3中斷
{
if (TIM_GetITStatus(TIM3, TIM_IT_Update) != RESET) //檢查TIM3更新中斷發生與否
{
USART_Cmd(UART4, DISABLE);
TIM_Cmd(TIM3, DISABLE);
TIM3->CNT=0;
if(rec_cnt==25)
{
SbusDataParsing(rec_buff); //SBUS決議
}
else RecErr_Flag++;
rec_cnt=0;
WaitRec_cnt=0;
TIM_ClearITPendingBit(TIM3, TIM_IT_Update); //清除TIMx更新中斷標志
}
}
決議函式:
SbusDataParsing(u8 buf[])為決議函式,如果TIM3判斷正確接收了25個位元組的資料,則把串口接收到的25個資料放入buf[]陣列內,執行完的陣列結果ch[]就是我們需要的最終結果,
#include "sbus.h"
u16 ch[16]={0};
void SbusDataParsing(u8 buf[]) //S-BUS決議
{
ch[0] = ((u16)buf[ 1] >> 0 | ((int16_t)buf[ 2] << 8 )) & 0x07FF;
ch[1] = ((u16)buf[ 2] >> 3 | ((int16_t)buf[ 3] << 5 )) & 0x07FF;
ch[2] = ((u16)buf[ 3] >> 6 | ((int16_t)buf[ 4] << 2 ) | (int16_t)buf[ 5] << 10 ) & 0x07FF;
ch[3] = ((u16)buf[ 5] >> 1 | ((int16_t)buf[ 6] << 7 )) & 0x07FF;
ch[4] = ((u16)buf[ 6] >> 4 | ((int16_t)buf[ 7] << 4 )) & 0x07FF;
ch[5] = ((u16)buf[ 7] >> 7 | ((int16_t)buf[ 8] << 1 ) | (int16_t)buf[9] << 9 ) & 0x07FF;
ch[6] = ((u16)buf[ 9] >> 2 | ((int16_t)buf[10] << 6 )) & 0x07FF;
ch[7] = ((u16)buf[10] >> 5 | ((int16_t)buf[11] << 3 )) & 0x07FF;
ch[8] = ((u16)buf[12] << 0 | ((int16_t)buf[13] << 8 )) & 0x07FF;
ch[9] = ((u16)buf[13] >> 3 | ((int16_t)buf[14] << 5 )) & 0x07FF;
ch[10] = ((u16)buf[14] >> 6 | ((int16_t)buf[15] << 2 ) | (int16_t)buf[16] << 10 ) & 0x07FF;
ch[11] = ((u16)buf[16] >> 1 | ((int16_t)buf[17] << 7 )) & 0x07FF;
ch[12] = ((u16)buf[17] >> 4 | ((int16_t)buf[18] << 4 )) & 0x07FF;
ch[13] = ((u16)buf[18] >> 7 | ((int16_t)buf[19] << 1 ) | (int16_t)buf[20] << 9 ) & 0x07FF;
ch[14] = ((u16)buf[20] >> 2 | ((int16_t)buf[21] << 6 )) & 0x07FF;
ch[15] = ((u16)buf[21] >> 5 | ((int16_t)buf[22] << 3 )) & 0x07FF;
}
主函式:
主函式的主要功能:上電配置串口USART4和定時器TIM3,然后while回圈檢查串口USART4的RX引腳PC11是否出現連續的高電平,每次while回圈一次檢測是高則WaitRec_cnt+1,是低則清0,直到出現一段連續的高電平就表明進入了兩幀SBUS中間的幀間隔中,再開啟串口確保能從第一個位元組開始接收,實際的WaitRec_cnt時間不用特別精確但需要大家進行除錯,不同單片機主頻不同,執行while的時間也不同,STM32F407主頻168M,WaitRec_cnt執行到3000時大概700多us,同時需要自行考慮持續多久開啟串口中斷比較好,不要影響到其他程式的運行,
#include "stm32f4xx.h"
#include "usart.h"
#include "tim.h"
extern u32 WaitRec_cnt;
int main(void)
{
Uart4_Init(100000); //遙控器
TIM3_Init(29,8399);
while(1)
{
if(GPIO_ReadInputDataBit(GPIOC, GPIO_Pin_11)==1) //等待一段高電平,確保從第一個位元組開始,
{
WaitRec_cnt++;
}
else WaitRec_cnt=0;
if(WaitRec_cnt>3000) //3000時大概為幾百us,持續幾百us都為高則開啟串口
{
USART_Cmd(UART4, ENABLE);
}
}
}
其他.h檔案
sbus.h
#ifndef __SBUS_H
#define __SBUS_H
#include "sys.h"
#define RightRocker_Horizontal ch[0] //left:242 center:1033 right:1804
#define RightRocker_Vertical ch[1] //up:1807 center:1024 down:240
#define LeftRocker_Vertical ch[2] //up:1805 center:1024 down:240
#define LeftRocker_Horizontal ch[3] //left:240 center:1025 right:1807
#define SWA ch[4] //up:240 down: 1807
#define SWB ch[5] //up:240 center:1024 down: 1807
#define SWC ch[6] //up:240 center:1024 down: 1807
#define SWD ch[7] //up:240 down: 1807
#define VAA ch[8] //left:240 center:1024 right:1807
#define VAB ch[9] //left:1807 center:1024 right:240
void SbusDataParsing(u8 buf[]);
#endif
usart.h
#ifndef __UART_H
#define __UART_H
#include "stdio.h"
#include "sys.h"
void Uart4_Init(u32 bound);
void Uart1_Init(u32 bound);
#endif
tim.h
#ifndef __TIMER_H
#define __TIMER_H
#include "sys.h"
void TIM3_Init(u16 arr,u16 psc);
#endif
總結
至此,整個SBUS的通訊已經完成,通訊的最終結果存放在CH[]陣列里以方便呼叫,遙控器上不同的搖桿和撥動開關對應不同的CH[]通道,sbus.h里也有進行宏定義以便大家進行遙控的按鈕和CH[]通道的對應:
如
#define RightRocker_Horizontal ch[0] //left:242 center:1033 right:1804
實際就是遙控器右邊搖桿水平撥動時對應的是ch[0]中的值的變化,不撥動時ch[0]值是1033,右搖桿撥到最左邊時ch[0]是242,最右邊時ch[0]是1804.不同的遙控器中間值和最大最小值會有小范圍的偏差,一般不會超過幾十,其他搖桿和按鍵的對應關系請自行體會,也可以去B站看實際控制遙控器對應的CH[]變化,不過是16進制的看著不是很方便,:
https://www.bilibili.com/video/BV1Kv411k7fQ
最后附一張剛買的一個遙控器的初始值除錯結果的截圖: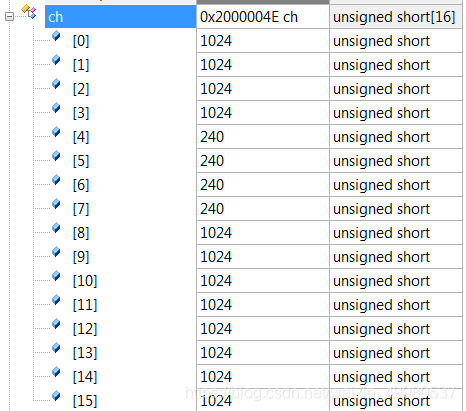
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/198691.html
標籤:其他