首先我們用的是V6.11版本,基本挺可,
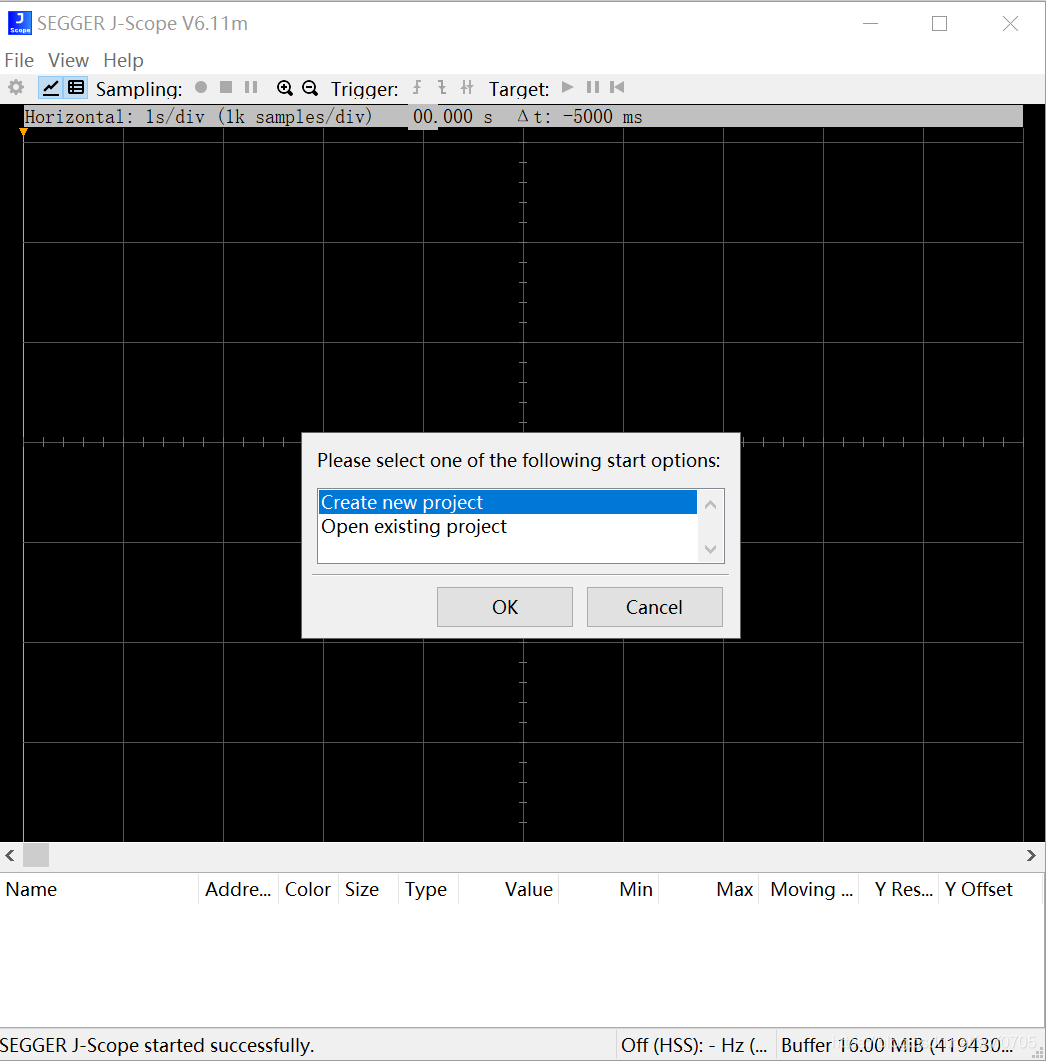
然后選擇 create new project
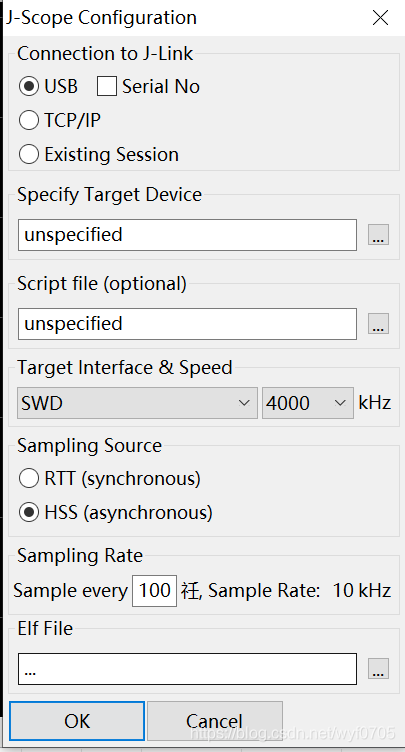
注意Target Interface & Speed那里要選擇SWD,不要變,否則不能正確匯入檔案,
在Elf File那里選擇你對應代碼的檔案,選擇MED-ARM里的 .axf檔案,
然后選擇你所要觀察的變數(這里我們是在調位置環,涉及到yaw和pitch兩個軸,所以一般我們會選擇里的motor_yaw, motor_pitch兩個軸上的電機的position_pid例都的ref和fdb兩個變數來進行觀測,
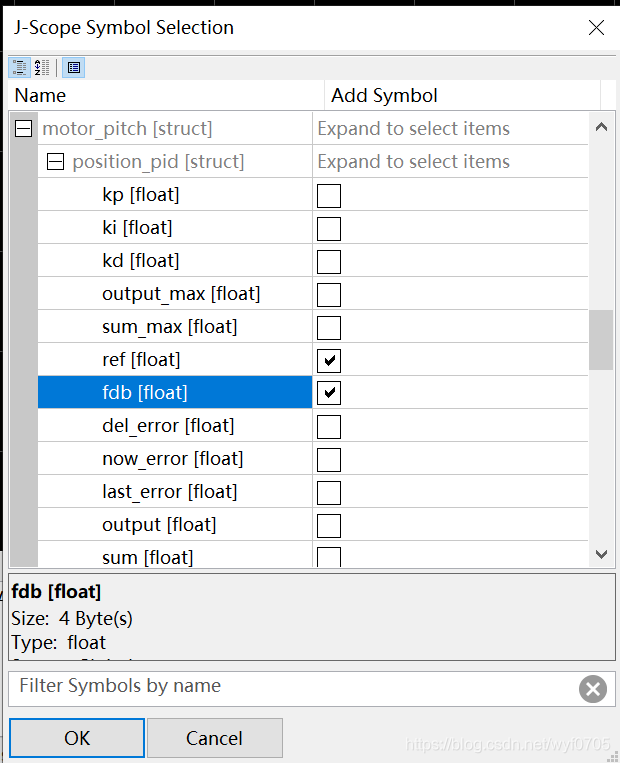
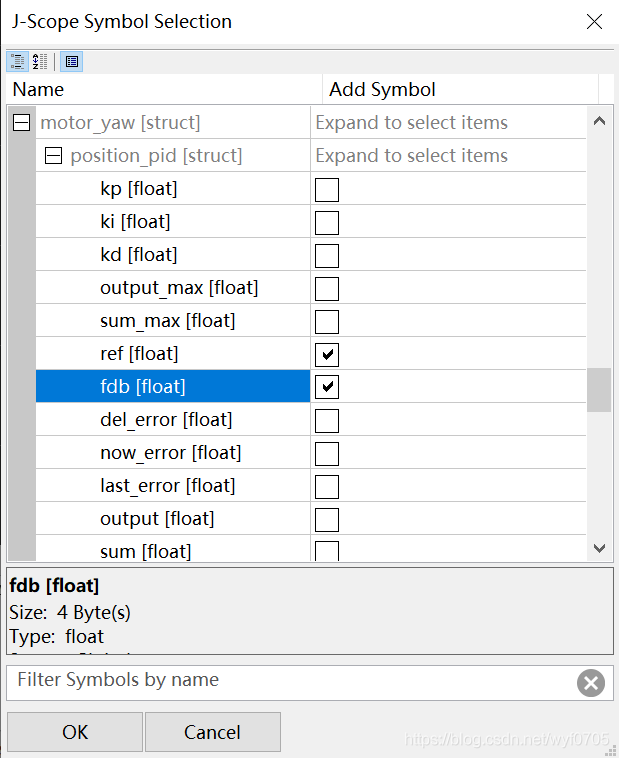
選擇好后就是這樣
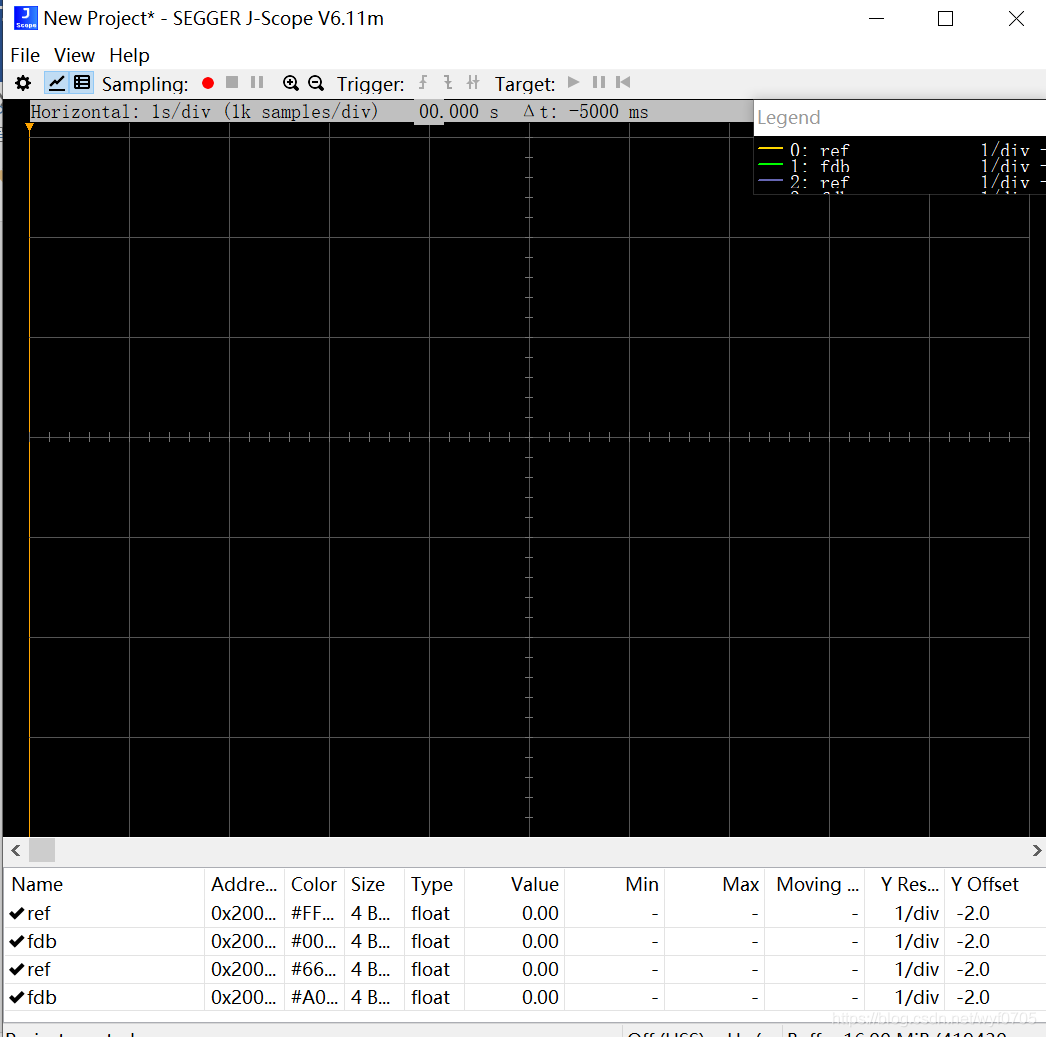
然后點擊左上方的紅點開始運行,注意此時要已經連上jlink,這時會讓你選擇你所使用的板子的型號,我們這里用的是stm32f427II,選擇成功后,在keil里運行代碼即可觀測到數值的變化曲線,
使用tips:
-
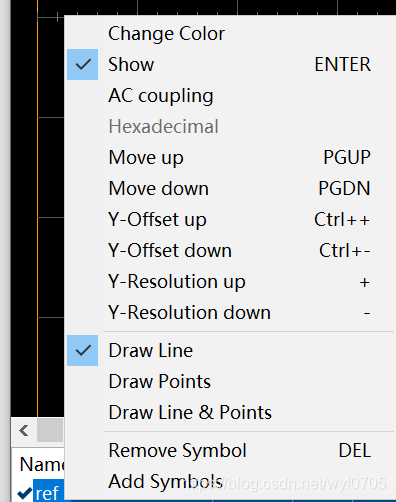
不想觀測這個變數的話,把show取消勾選即可
-
如果影像中峰值不太明顯,過大或過小,可以調整moving這里

按“+”或者“-”即可,最終使影像以一個比較合適的大小呈現出來,
-
想仔細觀測曲線的話可以按暫停,不然每次停止后再開始都要重新選擇一遍板子型號,
-
有時jscope不能正常使用,可能是因為keil正在debug模式,兩者同時涉及到對暫存器中內容的參考會造成一些問題,所以可以嘗試推出debug模式再看看jscope能不能正常使用,
-
進jscope之后,可能你沒有在觀測對應的數值,但是你的云臺一直在轉,所以可能導致即使你把曲線所對應的游標拉到最高或者最低都都看不見曲線,這個時候多把云臺再轉轉,看能不能把曲線顯示出來(比如你把云臺轉了36度之后,曲線可能就會往下非常非常多,導致無法正常觀測,這個時候再反方向轉回去就行了)
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/201062.html
標籤:其他
上一篇:運放一些引數的相互聯系