一、 邊界框回歸的概念
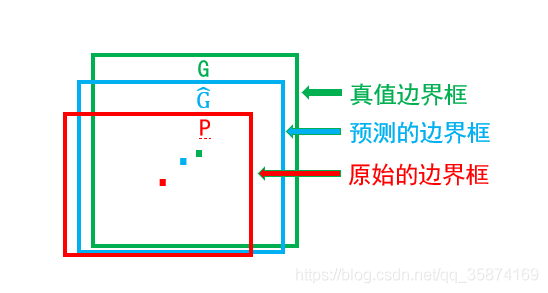
????如圖所示,紅色的框代表原始的建議框(proposal region),綠色的框代表目標的真實邊界框(ground truth),邊界框回歸的目標是:尋找一種映射關系,使得原始的建議框(紅色)經過映射變為一個與真實邊界框(綠色)更接近的邊界框(藍色),一個矩形框通常可以用x、y、w、h四個引數表示(它們分別表示視窗中心點的坐標以及矩形框的寬高),
二、公式講解
????邊界框回歸的這種映射關系可以表示為:

????邊界框
G
^
\hat{G}
G^ 可以通過下式得到,其中
P
P
P = (
P
P
P
x
_{x}
x?,
P
P
P
y
_{y}
y?,
P
P
P
w
_{w}
w?,
P
P
P
h
_{h}
h?),邊界框的變換由
d
d
d
x
_{x}
x?(
P
P
P)、
d
d
d
y
_{y}
y?(
P
P
P)、
d
d
d
w
_{w}
w?(
P
P
P)、
d
d
d
h
_{h}
h?(
P
P
P)四個函式實作,


????公式(1)實作的是平移變換,可以明顯看到是在
P
P
P
x
_{x}
x?,
P
P
P
y
_{y}
y? 的基礎上加一個
△
\triangle
△
x
_{x}
x?,
△
\triangle
△
y
_{y}
y?得到,很容易想到肯定在中心坐標上加上相對于寬和高的
d
d
d
x
_{x}
x?、
d
d
d
y
_{y}
y?倍;
????公式(2)實作的是一個對數空間的尺寸縮放變換,即乘以
e
e
e
d
^{d}
d 倍;
????在目標檢測演算法中,
d
d
d
x
_{x}
x?、
d
d
d
y
_{y}
y?、
d
d
d
w
_{w}
w?、
d
d
d
h
_{h}
h?是由演算法在邊界框回歸分支中輸出得到的,也就是在演算法中邊界框預測分支的輸出并不是真正的框的位置,而是相對于建議框的偏移量(delta),
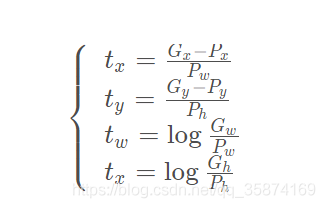
????我們又知道,在經典的 two-stage 目標檢測演算法中,根據邊界框 bbox的損失值來進行更新,那么必然要求出真實框相對于建議框的偏移量(t
?
_{*}
??),其計算公式如下,與上述的公式相對應,其實就是一個求解的逆程序,
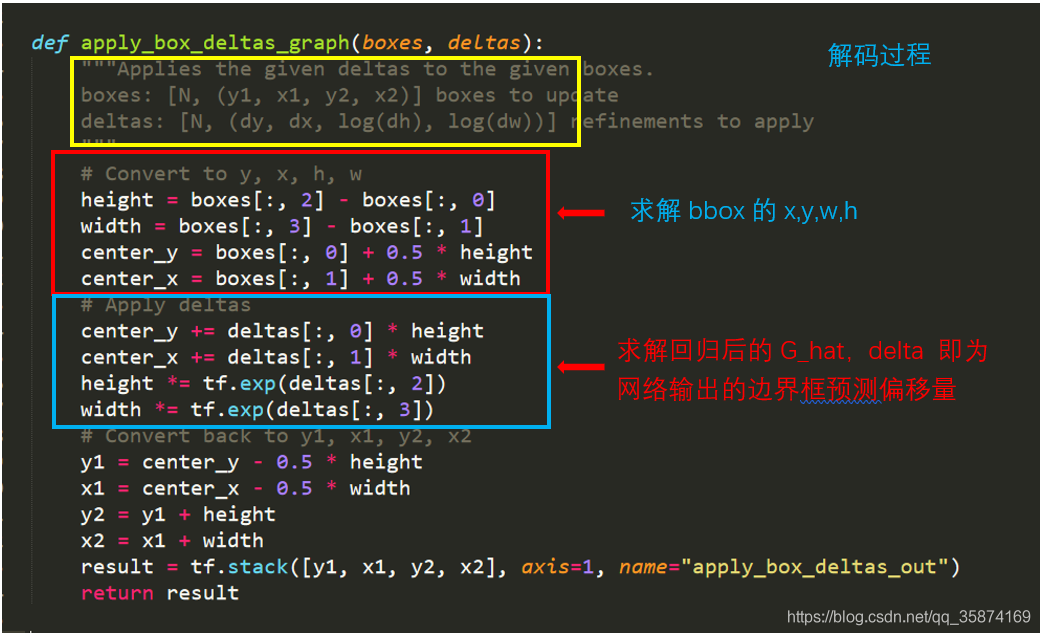
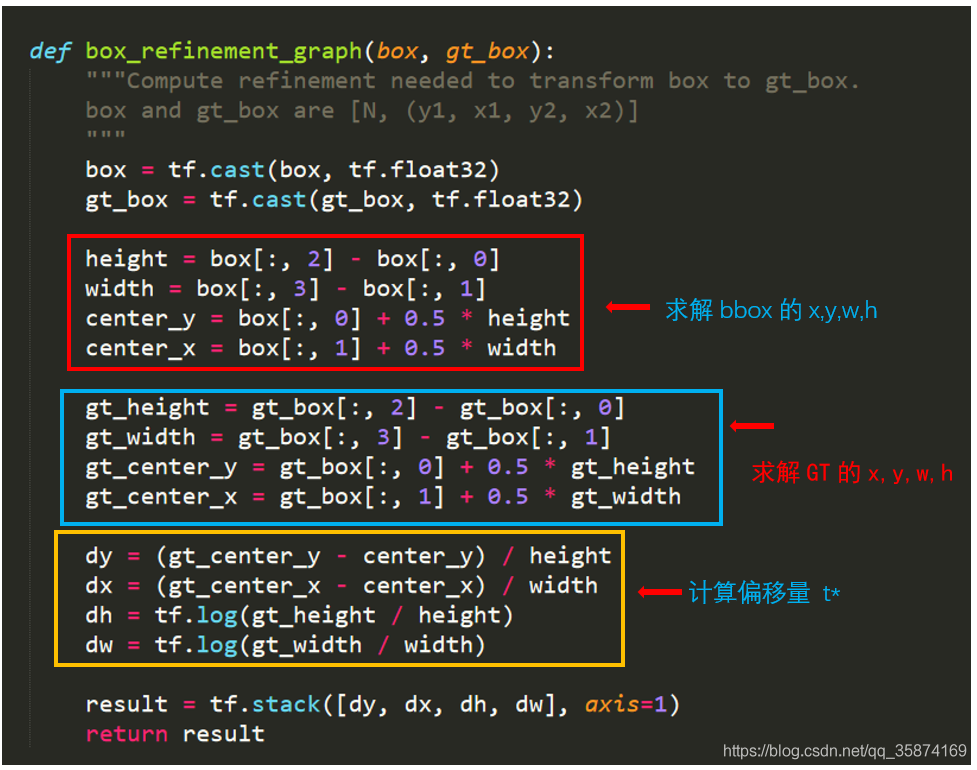
三、Mask R-CNN 中邊界框回歸代碼講解
????這塊其實就是對上述公式的一個應用,
1. 計算 G ^ \hat{G} G^ 的程序;
2.計算真實的(t ? _{*} ??)的程序
????若轉載請注明出處,謝謝大家,歡迎大家一起交流,
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/201787.html
標籤:其他
下一篇:日記(一)