在自動控制中,PID(Proportion-Integrationi-Differentiation:比例-積分-微分)控制演算法在近一個多世紀以來在空城控制領域中占據了主導地位,它是由蘇聯工程師Minorsky在1922年在研究艦船自動控制李玲分析中提示的演算法,
PID控制演算法是通過受控物件的實際行為和目標之間的誤差,通過比例-微分-積分運算再重新作用在被控物件,
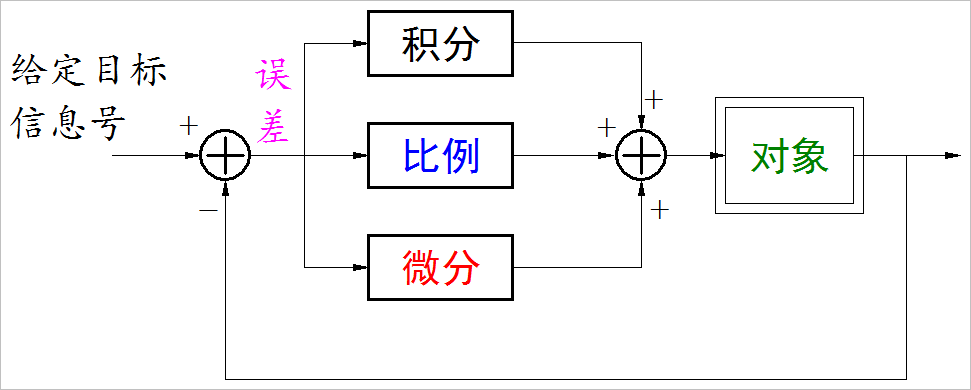
▲ PID控制演算法
在工業控制中,PID控制器可以通過模擬、數字方式實作,如今工業應用中的98%以上的程序控制、95%以上的運動控制還都是用這PID控制演算法,
對于初學者,掌握PID控制演算法引數調整非常重要,下面是來自于公眾號“芯片之家”中的一個推文,其中使用了一個視頻來演示了PID控制在位置跟蹤系統中的應用,
位置跟蹤系統的控制物件是驅動直流電機的電壓,經過電機旋轉帶動機械運動,
▲ 一個位置跟蹤PID控制系統
將驅動電機進行簡化,考慮它的轉速與施加電壓成正比,因此轉動角度位置就是轉速的積分,所以物件是一個一階積分慣性系統,
使用普通的比例控制就可以完成無誤差跟蹤隨著比例系數增加,跟蹤速度也會提高,但是也會出現過沖震蕩現象,
▲ 只使用比例控制的情況
加入位置的微分(也就是轉速)項可以消除震蕩,如果微分項過大,會使得位置跟蹤變緩慢,特別由于靜摩擦力的存在,有可能會使得位置跟蹤出現小的偏差,
▲ 加入微分項,可以消除震蕩
加入積分項,可以將由于系統的靜態摩擦所產生的位置偏差徹底消除,但也會增加系統的震蕩傾向,
所以此時需要綜合調整積分、微分的比例系數,
▲ 只使用I,D控制的效果
綜合調整PID的系數,可以使得系統跟蹤既快又穩,
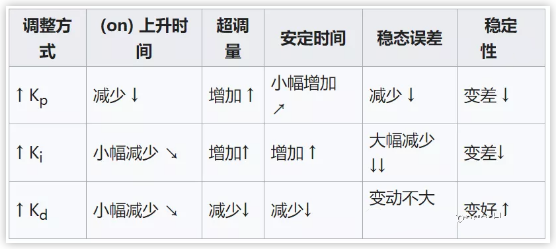
在很多教科書中也會給出一定的調整順序,或者給出通過系統的單位階躍回應曲線來定量計算最優的PID引數方法,
▲ 綜合利用PID達到快速穩定的效果
了解到PID引數與系統誤差之間的物理聯系,是實際中應用PID調節的重要環節,
▲ PID控制效果
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/202042.html
標籤:其他