希望有包含建筑物的資料集這是我在找尋帶框標注的三維點云建筑物資料集程序中發現的一些資料集,我是奔著找建筑物去的,還有很多關于室內場景和自動駕駛車前場景的資料集在此就不列出了,
歡迎補充和交流!!!
資料集:
- 1. 點云分類(羅蒙諾索夫莫斯科國立大學)
- 2. Semantic3D
- 3. Robotic 3D Scan Repository
- 4. KITTI愿景基準套件
- 5. Beyond PASCAL: A Benchmark for 3D Object Detection in the Wild
- 6. Oakland 3-D Point Cloud Dataset(奧克蘭 )
- 8.武大遙感資料
- 9 . DOTA資料集(images)
- 10. DIOR
- 11.LEVIR
- 12. NWPU VHR-10
- 13. INRIA aerial image dataset
- 14. 悉尼城市建筑
- 15. isprs點云資料
- 16. 中科院自動化所資料集
- 17. ILSVRC
- 18. ImageNet
- 19. SUN database
1. 點云分類(羅蒙諾索夫莫斯科國立大學)
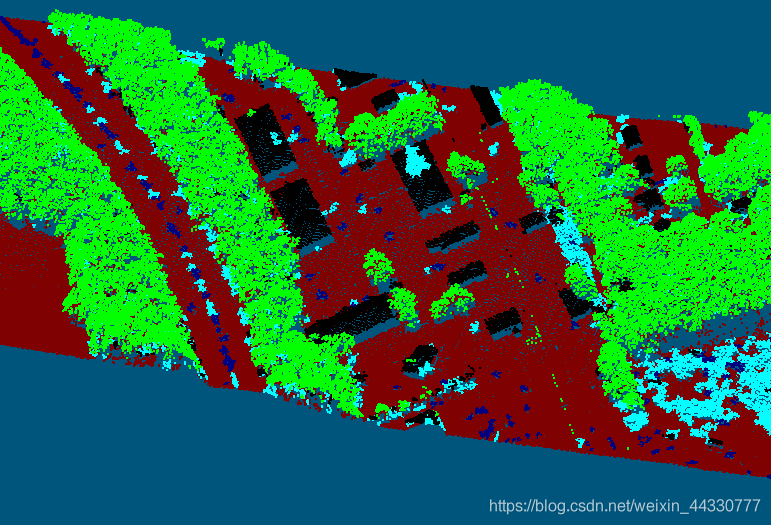 Legend: red — ground, black — building, navy — car, green — tree, cyan — low-vegetation.
Legend: red — ground, black — building, navy — car, green — tree, cyan — low-vegetation.
鏈接:點云分類
2. Semantic3D
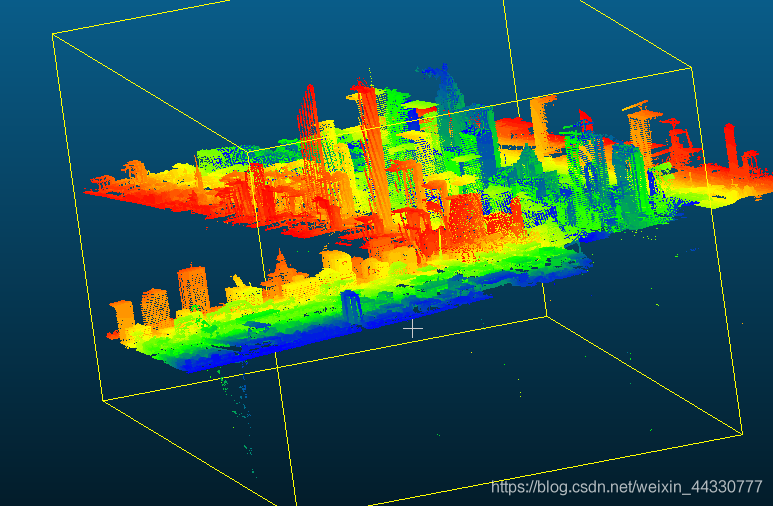
大規模點云分類基準,它提供了一個帶有大標簽的自然場景的3D點云資料集,總計超過40億個點,并且還涵蓋了多種多樣的城市場景,
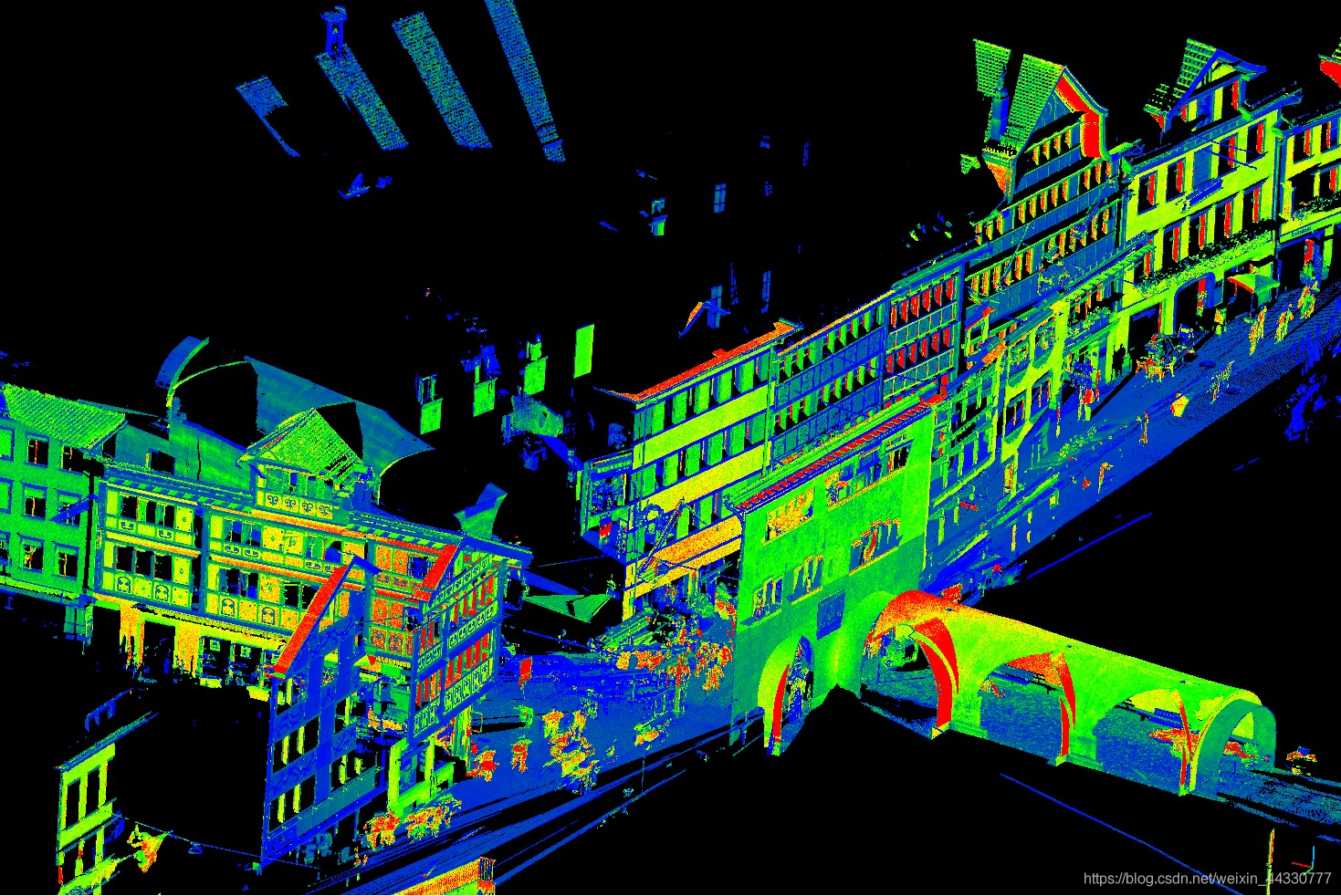
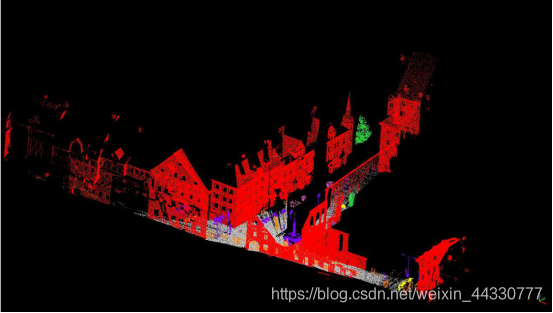
8個類別標簽的分類基準,即 1:人造地形; 2:自然地形; 3:高植被; 4:低植被; 5:建筑物; 6:硬景觀; 7:掃描人工制品,8:汽車 ,附加標簽 0:未標記點,標記沒有地面真值的點
鏈接:Semantic3D
3. Robotic 3D Scan Repository
包含大量的Riegl和Velodyne雷達資料,可能更適合slam研究
Authors Johannes Schauer, Andreas Nüchter from the University of Würzburg, Germany
Date 2016-10-27
Location Würzburg marketplace (geo:49.79445,9.92928)
Scanner Riegl VZ-400
#scans 6
#points 86585411
Datatype X,Y,Z (lefthanded) and reflectance in uosr format
Download wue_city.tar.xz
MD5 9b38cad10038ee4f3abbdd7b8431fa27
Filesize 1187 MiB (5117 MiB unpacked)
README README.wue_city
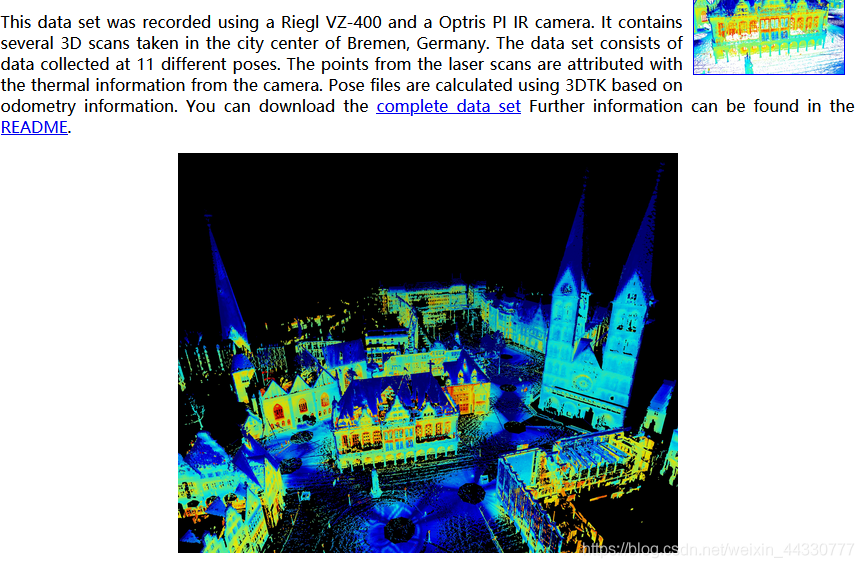
鏈接: Robotic 3D Scan Repository
4. KITTI愿景基準套件
這個資料集來自德國卡爾斯魯厄理工學院的一個專案,其中包含了利用KIT的無人車平臺采集的大量城市環境的點云資料集(KITTI),這個資料集不僅有雷達、影像、GPS、INS的資料,而且有經過人工標記的分割跟蹤結果,可以用來客觀的評價大范圍三維建模和精細分類的效果和性能,
3D物件檢測基準由7481個訓練影像和7518個測驗影像以及相應的點云組成,包括總共80.256個帶標簽的物件,單聲道和立體相機資料,包括校準、測程法等等,
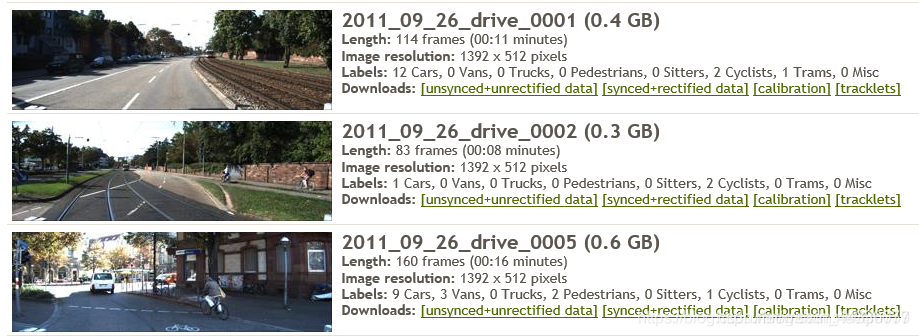
鏈接: The KITTI Vision Benchmark Suite
5. Beyond PASCAL: A Benchmark for 3D Object Detection in the Wild
PASCAL3D +資料集,它是用于3D物件檢測和姿態估計的新穎且具有挑戰性的資料集, PASCAL3D +通過3D注釋增強了PASCAL VOC 2012 [12]的12個剛性類別,此外,從ImageNet 為每個類別添加了更多影像,與現有的3D資料集相比,PASCAL3D +影像具有更大的可變性,并且每個類別平均有3,000多個物件實體,該資料集將為研究3D檢測和姿態估計提供豐富的測驗平臺,并將有助于顯著推動這一領域的研究,在新的資料集上提供了DPM 的變化結果,用于在不同情況下進行物件檢測和視點估計,
物體檢測和姿態估計的基準(10個類別,每個類別有10個物件實體)
鏈接: A Benchmark for 3D Object Detection in the Wild
6. Oakland 3-D Point Cloud Dataset(奧克蘭 )
這個資料庫的采集地點是在美國卡耐基梅隆大學周圍,資料采集使用Navlab11,配備側視SICK LMS激光掃描儀,用于推掃, 其中包含了完整資料集、測驗集、訓練集和驗證集,
鏈接:Oakland 3-D Point Cloud Dataset


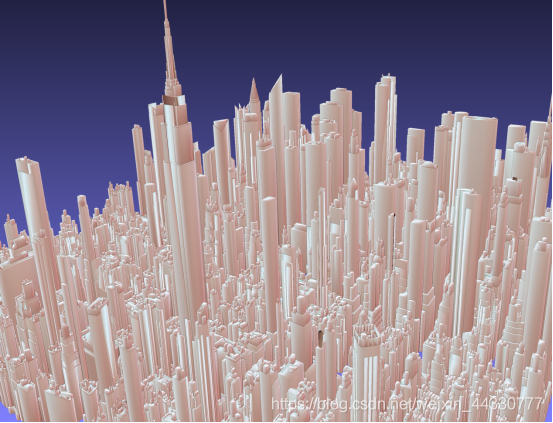
- Generic 3D Representation via Pose Estimation and Matching
該資料集涵蓋紐約,芝加哥,華盛頓,拉斯維加斯,佛羅倫薩,阿姆斯特丹,舊金山和巴黎的市中心和周邊地區,包含這些城市的3D模型以及街景影像和元資料,這些模型已進行地理注冊并手動生成,
鏈接: Generic 3D Representation via Pose Estimation and Matching
8.武大遙感資料
WHU-RS19 Dataset 是一個遙感影像資料集,其包含 19 個類別的場景影像共計 1005 張,其中每個類別有 50 張,WHU-RS19是從谷歌衛星影像上獲取19類遙感影像,可用于場景分類和檢索,
該資料集由武漢大學于 2011 年發布,相關論文有《Satellite Image Classification via Two-layer Sparse Coding with Biased Image Representation》,
建議的基準資料集包括 115 次掃描,共收集了 17.4 億多個 3D 點,這些點來自 11 個不同的環境(即地鐵站、高速鐵路站臺、山區、森林、公園、校園、住宅、河岸、文物建筑、地下挖掘和隧道),這里僅取文物與住宅點云,
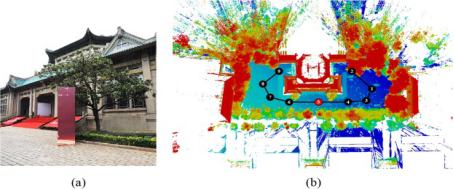
鏈接: csdn會員下載(我沒下載,不知可用否)
暫無有效鏈接,需要可向武大申請使用
9 . DOTA資料集(images)
資料集是遙感影像,DOTA1.5是在DOTA基礎上擴增的資料集
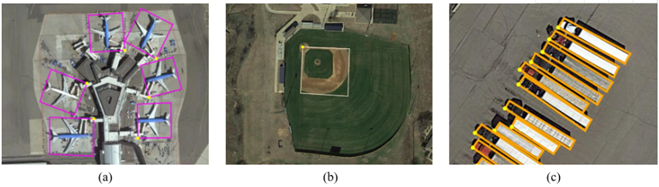
DOTA資料集包含2806張航空影像,尺寸大約為4kx4k,包含15個類別共計188282個實體,其標注方式為四點確定的任意形狀和方向的四邊形(區別于傳統的對邊平行bbox)


標注格式:
在資料集中,每個實體的位置由四邊形邊界框注釋,可以表示為“x 1,y 1,x 2,y 2,x 3,y 3,x 4,y 4”,其中(xi,yi)表示影像中定向邊界框頂點的位置,頂點按順時針順序排列, 以下是采用的注釋方法的可視化,黃點代表起點, 它指的是:(a)飛機的左上角,(b)大型車輛鉆石的左上角,(c)扇形棒球的中心,
鏈接:遙感影像資料集DOTA1.5 百度云鏈接
10. DIOR
“DIOR”是一個用于光學遙感影像目標檢測的大規模基準資料集,資料集包含23463個影像和192472個實體,涵蓋20個物件類,這20個物件類是飛機、機場、棒球場、籃球場、橋梁、煙囪、水壩、高速公路服務區、高速公路收費站、港口、高爾夫球場、地面田徑場、天橋、船舶、體育場、儲罐、網球場、火車站、車輛和風磨,
鏈接:DIOR
11.LEVIR
LEVIR資料集由大量 800 × 600 像素和0.2m?1.0m /像素的高解析度Google Earth影像和超過22k的影像組成,LEVIR資料集涵蓋了人類居住環境的大多數型別地面特征,例如城市,鄉村,山區和海洋,資料集中未考慮冰川,沙漠和戈壁等極端陸地環境,資料集中有3種目標型別:飛機,輪船(包括近海輪船和向海輪船)和油罐,所有影像總共標記了11k個獨立邊界框,包括4,724架飛機,3,025艘船和3,279個油罐,每個影像的平均目標數量為0.5,
鏈接:LEVIR
12. NWPU VHR-10
西北工業大學標注的航天遙感目標檢測資料集,共有800張影像,其中包含目標的650張,背景影像150張,目標包括:飛機、艦船、油罐、棒球場、網球場、籃球場、田徑場、港口、橋梁、車輛10個類別,開放下載,大概73M.
鏈接:NWPU VHR-10
13. INRIA aerial image dataset
Inria是法國國家資訊與自動化研究所簡稱,該機構擁有大量資料庫,其中此資料庫是一個城市建筑物檢測的資料庫,標記只有building, not building兩種,且是像素級別,用于語意分割,訓練集和資料集采集自不同的城市遙感影像,
鏈接:INRIA aerial image dataset
14. 悉尼城市建筑
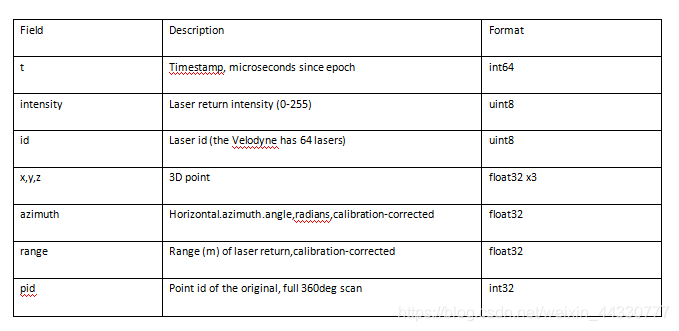
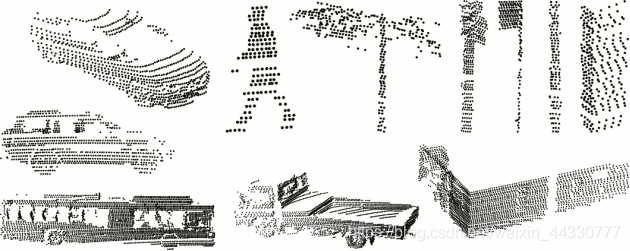
這個資料集包含用Velodyne HDL-64E LIDAR掃描的各種常見城市道路物件,收集于澳大利亞悉尼CBD,含有631個單獨的掃描物體,包括車輛、行人、廣告標志和樹木等,可以用來測驗匹配和分類演算法,
Sydney Urban Objects Dataset 下面是資料格式:
鏈接:Sydney Urban Objects Dataset
15. isprs點云資料
ISPRS官方提供了航空、無人機、傾斜影像資料進行密集匹配和三維重建,以下給出相應的資料獲取地址,
- 航空資料
一共提供了兩組航空實驗資料,一組是高樓林立的加拿大Toronto地區,另一組是半農村地區的德國Vaihingen地區,兩組資料的航向重疊度為60%,旁向重疊度為30%,
鏈接: 航空資料
- 無人機資料
鏈接:無人機資料
- 傾斜資料
鏈接:傾斜資料
16. 中科院自動化所資料集
國內的中科院自動化研究所提供了多組近景三維重建的資料集,
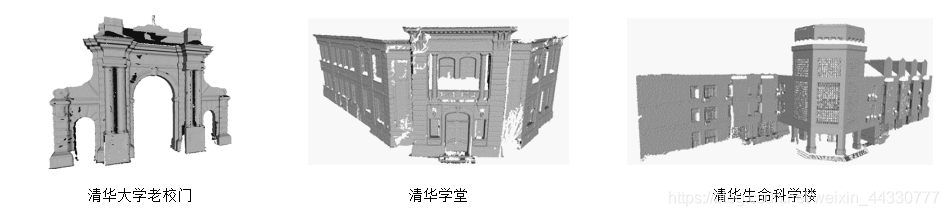
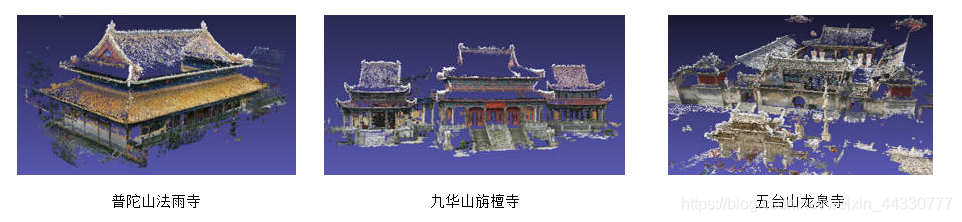
鏈接: 中科院資料集
17. ILSVRC
ImageNet Large Scale Visual Recognition Challenge
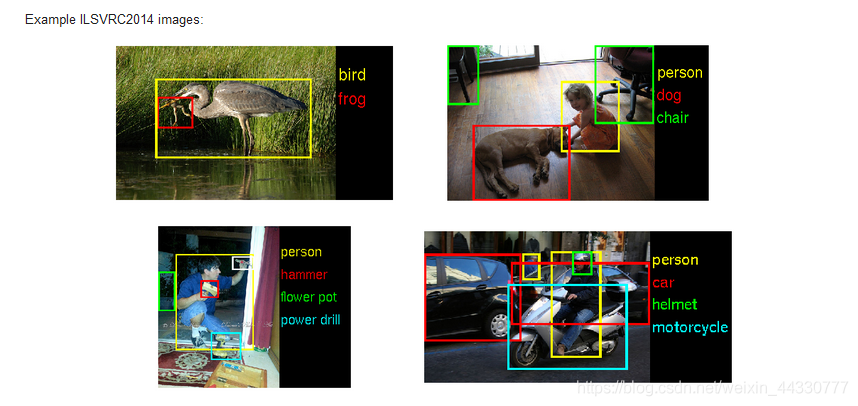
鏈接:ILSVRC2014
18. ImageNet
ImageNet相關資訊如下:
1)Total number of non-empty synsets: 21841
2)Total number of images: 14,197,122
3)Number of images with bounding box annotations: 1,034,908
4)Number of synsets with SIFT features: 1000
5)Number of images with SIFT features: 1.2 million
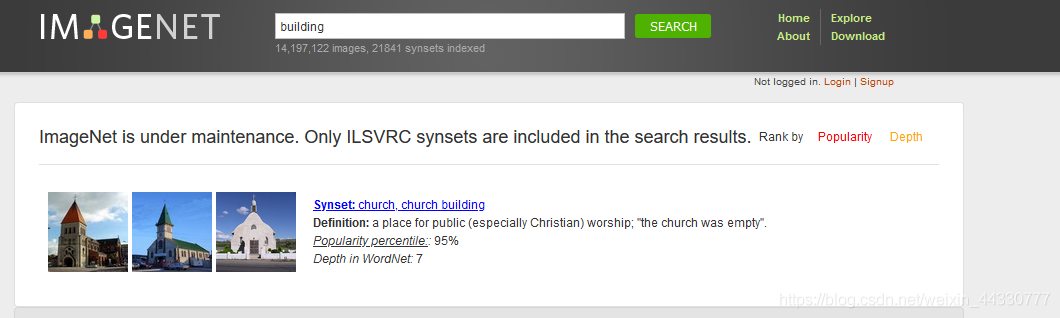
鏈接: ImageNet
19. SUN database
- 131067 Images
- 908 Scene categories
- 313884 Segmented objects
- 4479 Object categories

鏈接:SUN database
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/202229.html
標籤:其他
上一篇:軟考