SPH(光滑粒子流體動力學)流體模擬實作五:PCISPH
我們知道真實的液體是不可壓縮的,但我們在計算機中離散的計算流體運動,在一定的時間步長內,用標準的SPH方法求解,在在粒子聚集處容易發生擠壓,造成壓縮,有兩種常用的方法模擬不可壓縮性:1.在WCSPH(弱可壓縮SPH)中,利用剛性狀態方程(EOS)建模壓力,2.通過求解壓力泊松方程實作不可壓縮性,但這兩種方法都有很昂貴的計算費用,
文章“Predictive-Corrective Incompressible SPH”中,提出了一種預測矯正的方法,來使粒子達到不可壓縮性,其性能上相比傳統兩種方法,更加的高效,
PCISPH模型
SPH概述
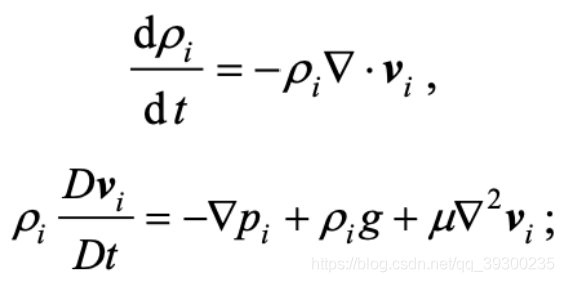
在拉格朗日粒子描述下, 控制流體運動的偏微分方程 Navier-Stokes 方程可表示為:
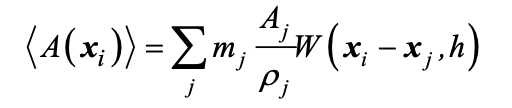
SPH方法的核心思想是以離散化粒子的形式來表征連續的場, 并對場量使用積分近似的方式進行計算,位置在xi粒子i的場量:
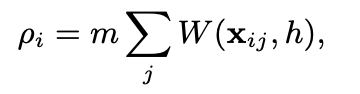
第i個粒子的密度計算公式為:
壓力場直接從Navier-Stokes方程式推導而得:

PCISPH演算法
在PCISPH方法中,速度和位置會及時更新,并估計新的粒子密度,然后,對于每個粒子,計算出參考密度的預測變化,并用于更新壓力值,壓力值又進入壓力的重新計算,此程序一直迭代到收斂,即直到所有粒子密度波動均小于用戶定義的閾值η(例如1%),在完成矯正后,我們再更新速度和位置,詳細演算法流程圖如下:
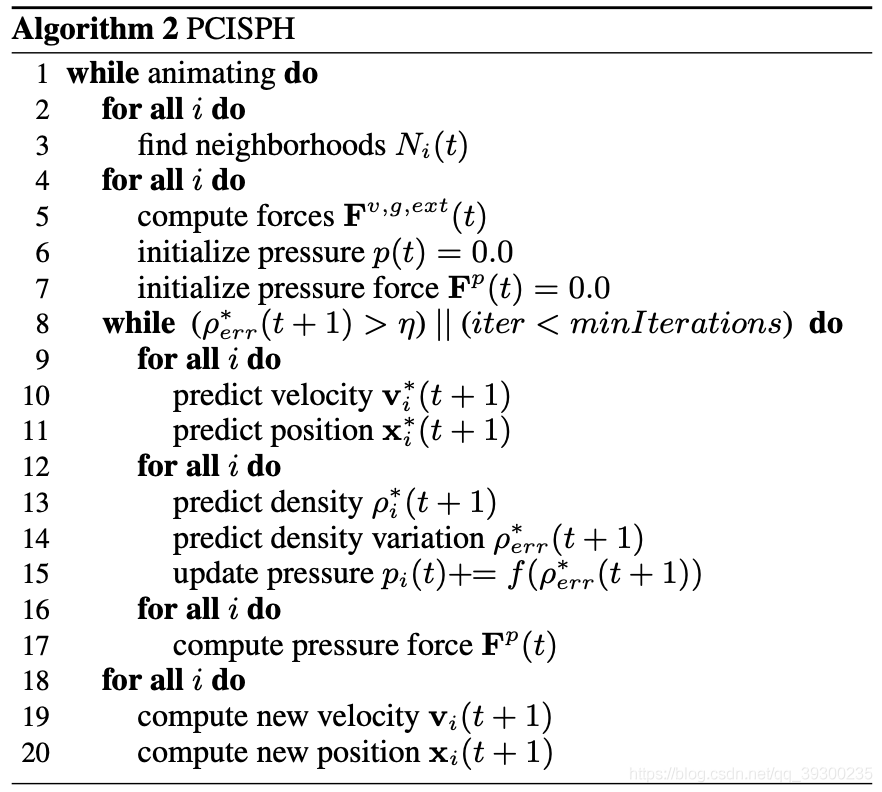
該演算法總體思路如下:
1.計算每個粒子的鄰居資訊,并記錄在鄰接表內,
2.計算出了壓力之外的所有其他力(黏力,重力),
3.執行矯正回圈:執行1).,2).,3).,
1).預測所有粒子新的的速度和位置,
2).預測所有粒子新的密度,以及計算新密度和舊密度之間的差值,
3).預測所有粒子的壓力,
4.完成矯正后,利用矯正的壓力計算粒子速度和位置,
壓強導數
我們的演算法是根據預測的密度計算新的壓力值,因此我們需要找到它們之間變化的關系,我們的目的是找到一個壓強p,該壓強以這樣一種方式改變粒子的位置,即預測的密度與參考密度相對應,
對于給定的內核平滑長度h,使用SPH密度求和公式計算時間點t + 1處的密度:
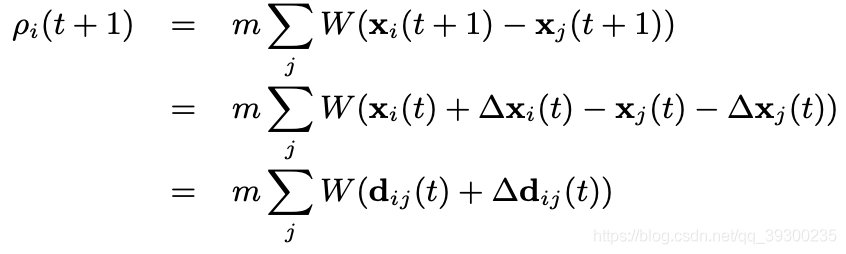
其中,
,假定
非常小,我們可以用一階泰勒展開近似:
![]()
帶入得:
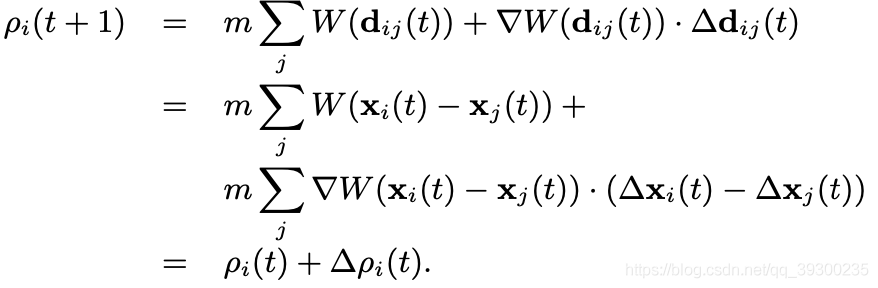
我們令![]() ,因此密度增量公式為:
,因此密度增量公式為: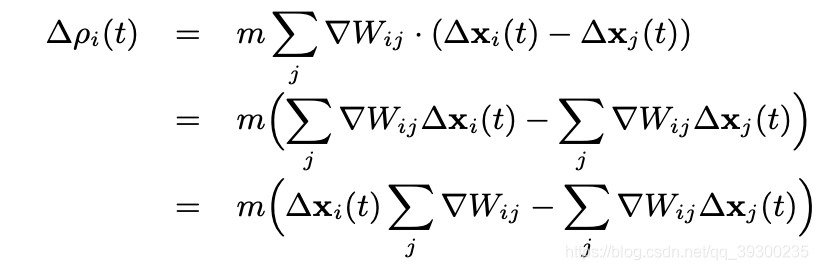
我們假設鄰居具有相等的壓強且密度為靜止密度
(根據不可壓縮性條件),則結果是:

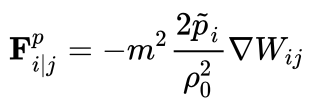
PCISPH演算法在每次迭代校正時只矯正d流體粒子的壓力,通過迭代計算出的壓力讓粒子之間不至于靠的過近(粒子之間距離太近可以理解為流體可壓縮),在只考慮壓力的情況下,根據時間積分可以計算出粒子在該壓力作用下的位移:
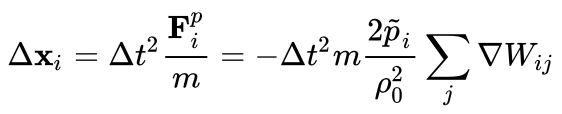
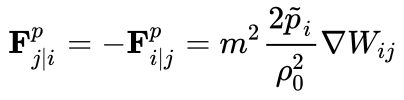
粒子i在獲得粒子j的壓力同時,也會對領居粒子j施加反作用力,因此:
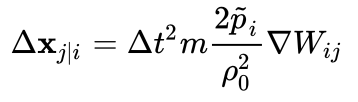
同樣,由于粒子i導致粒子j產生的位移為:
將位移增量帶入密度增量公式:
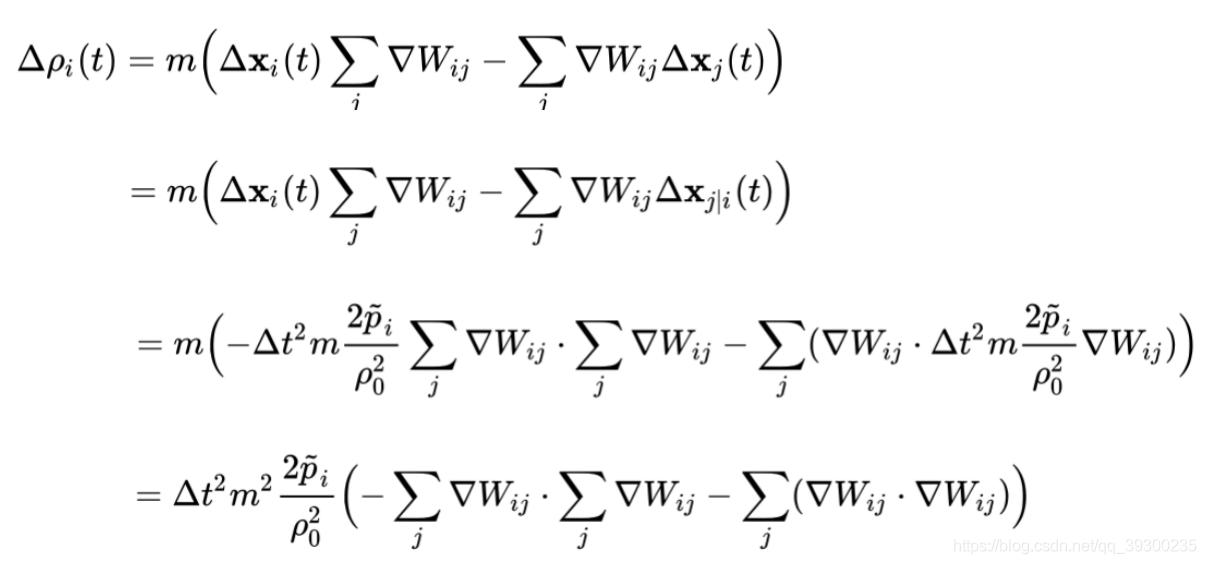
因此為:

其中為:
![]()
公式表示了我們迭代程序中,需要不斷變化
的密度值,從而滿足粒子不可壓縮性,而改變
的密度需要改變
的壓強,我們每次預測的粒子密度為:
,預測密度和靜止密度之間的誤差為:
,而我們的目標是讓粒子密度為
,這需要的密度改變數為
,因此,我們需要施加的壓強值為:

這個壓強計算公式在鄰居粒子數目不足的時候會導致計算錯誤,解決辦法是進行一次預計算,即在流體粒子周圍充滿鄰居粒子的情況下計算,我們可以直接在初始化流體時計算一次系數即可:

因此,我們的壓強改變數為:
![]()
由于只要不滿足不可壓縮條件,我們就重復進行預測校正步驟,因此,我們需要在迭代中不斷矯正壓強:
![]()
演算法實作
我們之前提到,在計算系數時需要在流體初始化時計算,因此我們使用函式_computeGradWValues()和_computeDensityErrorFactor()計算該系數:
void FluidSystem::_init(unsigned int maxPointCounts, const fBox3 &wallBox, const fBox3 &initFluidBox, const glm::vec3 &gravity){
m_pointBuffer.reset(maxPointCounts);
m_sphWallBox=wallBox;
m_gravityDir=gravity;
//根據粒子間距計算粒子質量
m_pointMass=m_restDensity*pow(m_pointDistance,3.0);
//設定流體塊
_addFluidVolume(initFluidBox, m_pointDistance/m_unitScale);
//MarchingCube演算法屬性
m_mcMesh=rxMCMesh();
m_gridContainer.init(wallBox, m_unitScale, m_smoothRadius*2.0, 1.0,m_rexSize,m_gridScale);//設定網格尺寸(2r)
m_field=new float[(m_rexSize[0]+1)*(m_rexSize[1]+1)*(m_rexSize[2]+1)]();
posData=std::vector<float>(3*m_pointBuffer.size(),0);
m_hPosW.resize(3*m_pointBuffer.size(),0.0);
m_gridContainer.insertParticles(&m_pointBuffer);//每幀重繪粒子位置
m_neighborTable.reset(m_pointBuffer.size());//重置鄰接表
//計算W的梯度
_computeGradWValues();
//計算因子
_computeDensityErrorFactor();
}其中_computeGradWValues()代碼如下:
void FluidSystem::_computeGradWValues(){
float h2=m_smoothRadius*m_smoothRadius;//h^2
const int numP=m_pointBuffer.size();
for (int i=0; i<numP; i++) {
Point *pi=m_pointBuffer.get(i);
pi->sum_grad_w=glm::vec3(0.0f);
pi->sum_grad_w_dot=0.0f;
}
for (int i=0; i<numP; i++) {
Point *pi=m_pointBuffer.get(i);
pi->kernel_self=_computeNeighbor(i);
m_neighborTable.point_commit();
int neighborCounts=m_neighborTable.getNeighborCounts(i);
//預測密度計算
for (int j=0; j<neighborCounts; j++) {
unsigned int neighborIndex;
float r;
m_neighborTable.getNeighborInfo(i, j, neighborIndex, r);
Point* pj=m_pointBuffer.get(neighborIndex);
//需要用預測的位置去重新計算距離和核值
glm::vec3 pi_pj=(pi->pos-pj->pos)*m_unitScale;
float r2=pi_pj.x*pi_pj.x+pi_pj.y*pi_pj.y+pi_pj.z*pi_pj.z;
if(h2>r2){
float h2_r2=h2-r2;
r=pow(r2,0.5f);
float h=m_smoothRadius;
glm::vec3 gradVec=(pi->pos-pj->pos)*m_kernelSpiky/r*(h-r)*(h-r);
pi->sum_grad_w+=gradVec;
pj->sum_grad_w-=gradVec;
pi->sum_grad_w_dot+=glm::dot(gradVec,gradVec);
pj->sum_grad_w_dot+=glm::dot(-1.0f*gradVec,-1.0f*gradVec);
}
}
}
}我們在其中計算所有粒子的![]() 和
和![]() ,
,
之后我們在函式_computeDensityErrorFactor()中計算系數,代碼如下:
void FluidSystem::_computeDensityErrorFactor(){
float h2=m_smoothRadius*m_smoothRadius;
int maxNeighborIndex = 0;
int maxNeighs = 0;
const int numParticles = m_pointBuffer.size();
for (int i=0; i<numParticles; i++) {
Point *pi=m_pointBuffer.get(i);
int neighborCounts=m_neighborTable.getNeighborCounts(i);
int numNeighbors=0;
//預測密度計算
for (int j=0; j<neighborCounts; j++) {
unsigned int neighborIndex;
float r;
m_neighborTable.getNeighborInfo(i, j, neighborIndex, r);
Point* pj=m_pointBuffer.get(neighborIndex);
//需要用預測的位置去重新計算距離和核值
glm::vec3 pi_pj=(pi->pos-pj->pos)*m_unitScale;
float r2=pi_pj.x*pi_pj.x+pi_pj.y*pi_pj.y+pi_pj.z*pi_pj.z;
if(h2>r2){
numNeighbors++;
}
}
//獲取鄰居最多的粒子,和鄰居個數
if (numNeighbors>maxNeighs) {
maxNeighs=numNeighbors;
maxNeighborIndex=i;
}
}
//獲取鄰居最多的粒子
Point* pmax=m_pointBuffer.get(maxNeighborIndex);
//計算新的壓力根據密度誤差
float restVol=m_pointMass/m_restDensity;
float preFactor=2.0*restVol*restVol*m_deltaTime*m_deltaTime;
float gradWTerm=glm::dot(pmax->sum_grad_w*(-1.0f),pmax->sum_grad_w)-pmax->sum_grad_w_dot;
float divisor=preFactor*gradWTerm;
m_densityErrorFactor=-1.0/divisor;
const float factor = m_deltaTime / 0.0001f;
float densityErrorFactorParameter = 0.05 * factor * factor;
m_densityErrorFactor*=1.0*densityErrorFactorParameter;
}值得注意的是,我們還在系數之前乘上densityErrorFactorParameter影響系數,該系數受
影響,如果不乘上該系數就會出錯,論文里并沒有明確提出,
計算完成預計算的系數后,我們的tick()函式如下:
void FluidSystem::tick(bool suf){
//求解領居結構
m_gridContainer.insertParticles(&m_pointBuffer);//每幀重繪粒子位置
m_neighborTable.reset(m_pointBuffer.size());//重置鄰接表
//計算外力
_computerExternalForces();
//預測矯正
_predictionCorrection();
//更新速度和位置
_updatePosAndVel();
//用于構建表面
glm::vec3 tem=m_sphWallBox.min-glm::vec3(1.0);
if(suf){
CalImplicitFieldDevice(m_rexSize, tem, glm::vec3((1.0/m_gridScale)/m_gridContainer.getDelta()), m_field);
clearSuf();//清空表面資料
m_mcMesh.CreateMeshV(m_field, tem, (1.0/m_gridScale)/m_gridContainer.getDelta(), m_rexSize, m_thre, m_vrts, m_nrms, m_face);
}
}我們按照演算法流程,首先求解領居結構,這在之前的章節里介紹過,這里就不多提了,
然后計算除了壓力的所有外力,該函式_computerExternalForces()代碼如下:
void FluidSystem::_computerExternalForces(){
float h2=m_smoothRadius*m_smoothRadius;//h^2
for(int i=0;i<m_pointBuffer.size();i++){
Point* pi=m_pointBuffer.get(i);
pi->forces=glm::vec3(0.0);
//鄰居粒子裝載
pi->kernel_self=_computeNeighbor(i);
m_neighborTable.point_commit();
//外力計算
int neighborCounts=m_neighborTable.getNeighborCounts(i);
const float restVolume=m_pointMass/m_restDensity;
for(unsigned int j=0;j<neighborCounts;j++){
unsigned int neighborIndex;
float r;
m_neighborTable.getNeighborInfo(i, j, neighborIndex, r);
Point* pj=m_pointBuffer.get(neighborIndex);
float h_r=m_smoothRadius-r;
//F_Viscosity
//m_kernelViscosity = 45.0f/(3.141592f * h^6);
float vterm=m_kernelViscosity*m_viscosity*h_r*restVolume*restVolume;
pi->forces-=(pi->velocity-pj->velocity)*vterm;
}
//F_gravity
pi->forces+=m_gravityDir*m_pointMass;
//F_boundary
pi->forces+=_boundaryForce(pi)*m_pointMass;
//初始化矯正因子
pi->correction_pressure=0.0f;
pi->correction_pressure_froce=glm::vec3(0.0);
}
}計算完成外力后,進入矯正預測環節,該函式_predictionCorrection()代碼為:
void FluidSystem::_predictionCorrection(){
_density_error_too_large=true;
int iteration=0;
while ((iteration<minLoops)||((_density_error_too_large)&&(iteration<maxLoops))) {
for(int i=0;i<m_pointBuffer.size();i++){
Point* p=m_pointBuffer.get(i);
_predictPositionAndVelocity(p);
}
//回圈終止條件(所有粒子的最大預測密度)
_max_predicted_density=0.0;
for(int i=0;i<m_pointBuffer.size();i++){
_computePredictedDensityAndPressure(i);
}
//回圈終止條件
float densityErrorInPercent=max(0.1f*_max_predicted_density-100.0f,0.0f);
float maxDensityErrorAllowed=1.0f;
//如果密度誤差小于終止條件,則終止回圈(小于密度誤差閾值)
if(densityErrorInPercent<maxDensityErrorAllowed)
_density_error_too_large=false;
for (int i=0; i<m_pointBuffer.size(); i++) {
_computeCorrectivePressureForce(i);
}
iteration++;
}
}其中我們設定最小回圈次數為3,最大回圈次數為50,在矯正程序中,我們繼續細分為3個步驟:
1).預測所有粒子的速度和位置,該函式_predictPositionAndVelocity(p)代碼為:
void FluidSystem::_predictPositionAndVelocity(Point* p){
// v' = v + delta_t * a
// a = F / m
// v' = v + delta_t * F * V / m
// v' = v + delta_t * F * 1/density
//計算預測速度和位置
p->predicted_velocity=p->velocity+(p->forces+p->correction_pressure_froce)*m_deltaTime/m_pointMass;
p->predicted_position=p->pos+p->predicted_velocity*m_deltaTime;
//碰撞處理
_collisionHandling(p->predicted_position,p->predicted_velocity);
//初始化預測密度
p->predicted_density=0.0;
}值得注意的是,因為是預測的速度,所以需要好用矯正后的壓力去計算,
2).計算預測的密度和壓力,該函式_computePredictedDensityAndPressure(i)的代碼為:
void FluidSystem::_computePredictedDensityAndPressure(int i){
float h2=m_smoothRadius*m_smoothRadius;
Point* pi=m_pointBuffer.get(i);
int neighborCounts=m_neighborTable.getNeighborCounts(i);
pi->predicted_density=pi->kernel_self*m_pointMass;
//預測密度計算
for (int j=0; j<neighborCounts; j++) {
unsigned int neighborIndex;
float r;
m_neighborTable.getNeighborInfo(i, j, neighborIndex, r);
Point* pj=m_pointBuffer.get(neighborIndex);
//需要用預測的位置去重新計算距離和核值
glm::vec3 pi_pj=(pi->predicted_position-pj->predicted_position)*m_unitScale;
float r2=pi_pj.x*pi_pj.x+pi_pj.y*pi_pj.y+pi_pj.z*pi_pj.z;
if(h2>r2){
float h2_r2=h2-r2;
pi->predicted_density+=m_kernelPoly6*pow(h2_r2, 3.0)*m_pointMass;
}
}
auto sss=pi->predicted_density;
//計算密度誤差,僅考慮正向誤差
pi->density_error=max(pi->predicted_density-m_restDensity,0.0f);
//更新壓力,只矯正正壓力,densityErrorFactor被預先計算并用作常數
pi->correction_pressure+=max(pi->density_error*m_densityErrorFactor,0.0f);
_max_predicted_density=max(_max_predicted_density,pi->predicted_density);
}值得注意的是,我們這里都只考慮正向的誤差,即壓縮的密度誤差和壓強誤差,拉伸的我們不做考慮,
3).計算矯正后的壓力,該函式_computeCorrectivePressureForce(i)代碼為:
void FluidSystem::_computeCorrectivePressureForce(int i){
float h2=m_smoothRadius*m_smoothRadius;
Point* pi=m_pointBuffer.get(i);
int neighborCounts=m_neighborTable.getNeighborCounts(i);
pi->correction_pressure_froce=glm::vec3(0.0f);
float densSq=m_restDensity*m_restDensity;
float pi_pres=pi->correction_pressure;
//更新壓力
for (int j=0; j<neighborCounts; j++) {
unsigned int neighborIndex;
float r;
m_neighborTable.getNeighborInfo(i, j, neighborIndex, r);
Point* pj=m_pointBuffer.get(neighborIndex);
//需要用預測的位置去重新計算距離和核值
glm::vec3 pi_pj=(pi->pos-pj->pos)*m_unitScale;
float r2=pi_pj.x*pi_pj.x+pi_pj.y*pi_pj.y+pi_pj.z*pi_pj.z;
if(h2>r2){
r=pow(r2,0.5);
float h=m_smoothRadius;
float pj_pres=pj->correction_pressure;
glm::vec3 gradientKer=pi_pj*m_kernelSpiky/r*(h-r)*(h-r);
float grad=pi_pres/densSq+pj_pres/(m_restDensity*m_restDensity);
pi->correction_pressure_froce-=m_pointMass*m_pointMass*grad*gradientKer;
}
}
}這里,我們的預測矯正迭代代碼就結束了,我們推出迭代后,利用矯正好的壓力求解新的速度和位置,該函式_updatePosAndVel()代碼如下:
void FluidSystem::_updatePosAndVel(){
for(int i=0;i<m_pointBuffer.size();i++){
Point* pi=m_pointBuffer.get(i);
pi->forces+=pi->correction_pressure_froce;
const float invMass=1.0/m_pointMass;
// //Symplectic Euler Integration
// pi->velocity+=pi->forces*invMass*m_deltaTime;
// pi->pos+=pi->velocity*m_deltaTime/m_unitScale;
//Leapfrog integration
glm::vec3 vnext = pi->velocity + pi->forces*invMass*m_deltaTime; // v(t+1/2) = v(t-1/2) + a(t) dt
pi->velocity_eval = (pi->velocity + vnext)*0.5f; //v(t+1) = [v(t-1/2) + v(t+1/2)] * 0.5
pi->velocity = vnext;
pi->pos += vnext*m_deltaTime/m_unitScale; // p(t+1) = p(t) + v(t+1/2) dt
//彈入位置資料
posData[3*i]=pi->pos.x;
posData[3*i+1]=pi->pos.y;
posData[3*i+2]=pi->pos.z;
}
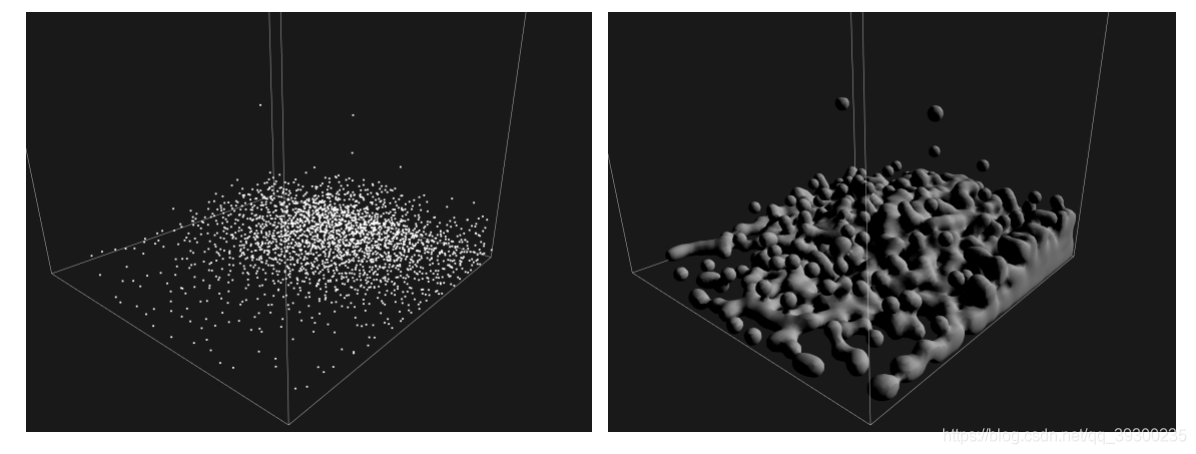
}完成結果圖:
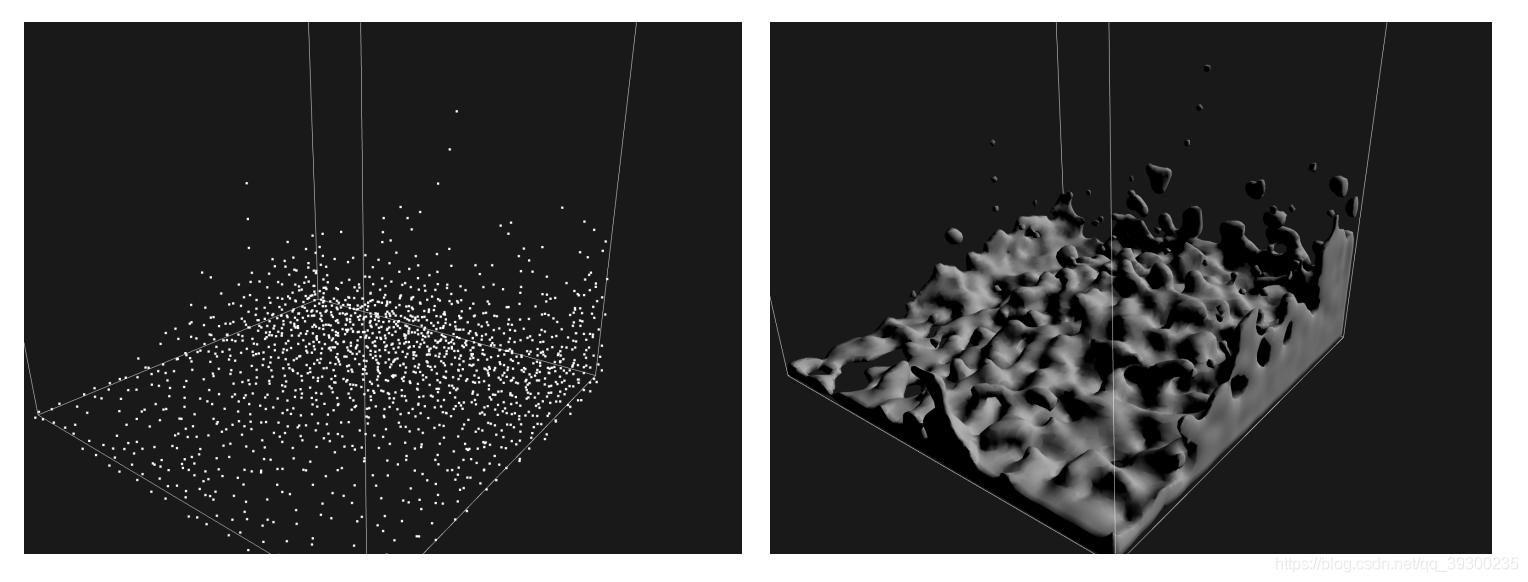
對比普通SPH,我們發現在擠壓處,PCISPH有明顯的矯正,普通SPH效果如下:
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/203378.html
標籤:其他
上一篇:ubuntu 安裝 docker 并配置鏡像加速(使用 apt-get 進行安裝)
下一篇:Linux服務器安裝node