一、血氧測量原理
1.1 PPG波形介紹
血氧飽和度(英語:Oxygen saturation),或稱血氧濃度,是指血中氧飽和血紅蛋白相對于總血紅蛋白(不飽和+飽和)的比例,人體需要并調節血液中氧氣的非常精確和特定的平衡, 人體的正常動脈血氧飽和度為95-100%, 如果該水平低于90%,則被認為是低氧血癥,
血氧的測量主要分為透射式和反射式,目前的主流是透射式,但是兩者原理差不多,都是使用發光二極管(紅光RED,紅外IR,綠光GREEN和藍光BLUE等)照射被測部位,然后使用一個光電二極管接收透射/反射的光線,將光信號轉換為電信號,然后通過高精度的ADC測量反射回的電流大小,評估血液中的含氧量,
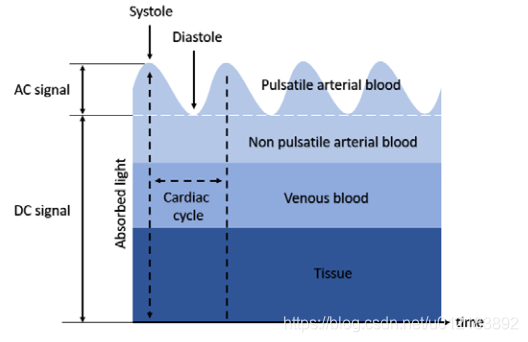
圖1 典型PPG 波形
上圖是一個典型的PPG波形,即光電二極管接收到原始的光信號波形,波形(由圖中間的白色橫虛線)可分為兩部分:DC signal 和 AC signal,即直流信號和交流信號,
其中直流信號由下到上可分為以下三部分的反射:組織(issue),靜脈血(Venous blood)和不跳動的動脈血(Non pulsatile arterial blood),當然對于不同年齡、性別和膚色等人不同,對應的DC signal 值也會不同,所以后面的血氧計算都是使用相對值,
而 AC signal 交流信號就比較單一:由跳動的動脈血反射得到,其中波峰對應心臟的收縮(Systole),波谷對應心臟舒張(Diastole),
1.2 心率計算(HR)
通過計算AC signal 兩個波峰的時間(圖中兩條豎著的黑色虛線),我們就能計算出心率,這里不再贅述,
1.3 灌注指數(PI)
臨床上,交流分量與直流分量的幅值之比反映了人體的血流灌注能力,稱為血流灌注指數(Perfusion Index,PI),其運算式為:
1.4 血氧計算(SpO2)
血壓計算公式也比較簡單,這里MAX30102是一路紅光,一路紅外,只分別算出紅光的交流除以紅光的直流即: ACred/DCred,和紅外的交流除以紅外的直流分量即:ACired/DCired,然后兩者再相除得到R,
得到 R 然后查表即可得到血氧值,也可以通過下面美信擬合的公式計算:
SpO2 = -45.060*R*R + 30.354 *R + 94.845
二、MAX30102傳感器原理
由上面的原理我們簡化為:將RED/IR 光射向皮膚,透過皮膚組織反射回的光被光敏傳感器接受并轉換成電信號,再經過AD轉換成數字信號,簡化程序:光--> 電 --> 數字信號,所以我們需要控制光源LED的電流強度和采樣率,光敏傳感器的ADC精度(xbit)等,
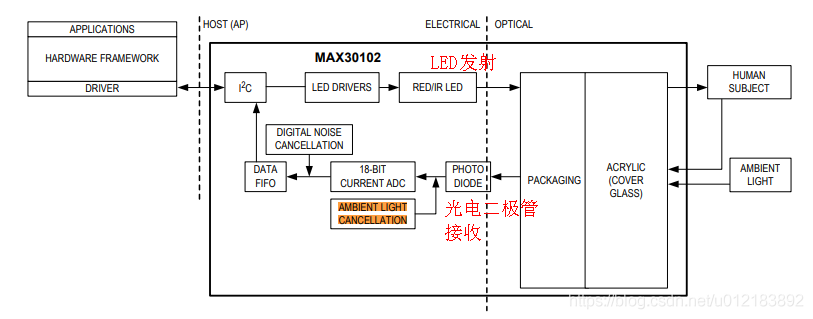
圖2 MAX30102 系統框圖
三、MAX30102暫存器配置
3.1 初始化配置
在一般的配置中我們讓設備開機直接開始進入SpO2/HR 模式就好(PROX_INT_EN 置 0),設定兩個LED的電流都為0x40,然后開啟 RDY 中斷使能,這樣每次資料采集ok就可以中斷一次去處理資料,
// 主要暫存器配置引數
MAX30102_Write_Byte(MODE_CONFIG, 0X40); //RESET FIRST
am_util_delay_ms(20);
MAX30102_Write_Byte(INTERRUPT_ENABLE1, 0xC0); // A_FULL_EN, PPG_RDY_EN set to 1.
MAX30102_Write_Byte(INTERRUPT_ENABLE2, 0x02); //TEMP RDY EN 0x02
MAX30102_Write_Byte(FIFO_WR_PTR, 0x00); //recommend to clear first
MAX30102_Write_Byte(OVERFLOW_COUNTER, 0x00); //recommend to clear first
MAX30102_Write_Byte(FIFO_RE_PTR, 0x00); //recommend to clear first
MAX30102_Write_Byte(FIFO_CONFIG, 0x0f); //sample avg = 1, fifo rollover=false, fifo almost full = 17
MAX30102_Write_Byte(MODE_CONFIG, 0x03); //SpO2 mode. RED and IR
MAX30102_Write_Byte(SPO2_CONFIG, 0x2B); // SPO2_ADC range = 4096nA, 200Hz, LED pulseWidth (411uS) ,18bit
MAX30102_Write_Byte(DIE_TEMP_CONFIG, 0x01); //TEMP_EN set 1.
MAX30102_Write_Byte(LED1_PULSE_AMP, 0X40); //Choose value for ~ 13mA for LED1(red)
MAX30102_Write_Byte(LED2_PULSE_AMP, 0X40); //Choose value for ~ 13mA for LED2(ir)
MAX30102_Read_Byte(INTERRUPT_STATUS1); //clear int flag first.不然可能無法進中斷
MAX30102_Read_Byte(INTERRUPT_STATUS2);3.2 FIFO讀取資料
MAX30102 FIFO 的深度為32,每個buf是6個位元組(兩通道資料,每通道3位元組),我么可以開啟 PPG_RDY_EN,這樣就能每來一個新的資料,就會中斷一次通知我們去取資料,讀FIFO_DATA 就會自動清掉中斷標志位,
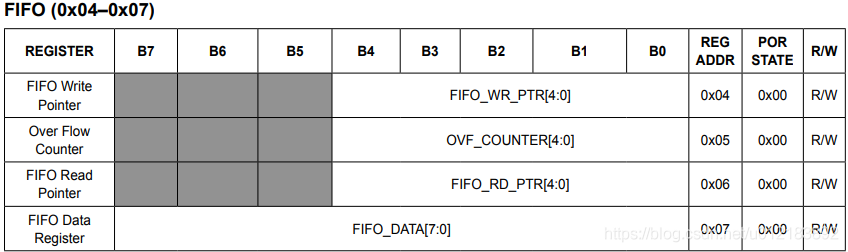
圖3 FIFO 暫存器
FIFO相關的暫存器有4個,雖然是顯示均可讀寫(R/W),但是實際上只有 FIFO Read Pointer可以寫(應用在讀資料出錯,往回重讀一次的情況),其他 FIFO 暫存器均為只讀,
- FIFO Write Pointer:好理解,就是寫指標暫存器,保存下一個新資料在 FIFO 中的寫地址,每次來一個資料,這個寫指標會自動移動一位,
- Over Flow Counter: 如果32個FIFO深度滿了,就會在這里增加1,表示溢位,
- FIFO Read Pointer:FIFO讀指標,始終指向下一個待讀取的FIFO地址,如果資料讀取后,讀地址也會自動增加,
- FIFO Data Register: 可以簡單的理解為 *FIFO_RD_PTR,始終指向下一個資料,
I2C暫存器映射中的FIFO_DATA暫存器指向要從FIFO讀取的下一個樣本, FIFO_RD_PTR指向此樣本,所以雖然通過連續讀 FIFO_DATA 不會使該暫存器自增,但是 FIFO_DATA 暫存器實際是映射到FIFO_RD_PTR,而FIFO_RD_PTR 暫存器始終指向下一個待讀取的資料,所以對FIFO_DATA 連續讀,是能夠實作的,讀 FIFO 函式如下:
/*****************************************************************************************
* Function Name: MAX30102_Read_FIFO_Data
* Description : 通過硬體I2C,讀取FIFO中的資料RED, IR.
* Arguments : *data:兩路電流值大小
* Return Value : none
******************************************************************************************/
void MAX30102_Read_FIFO_Data(uint32_t *data)
{
uint8_t tmp[6];
MAX30102_Read_Len(FIFO_DATA, tmp, 6);
data[0] = ((tmp[0]<<16 | tmp[1]<<8 | tmp[2]) & 0x03ffff);
data[1] = ((tmp[3]<<16 | tmp[4]<<8 | tmp[5]) & 0x03ffff);
//am_util_stdio_printf("%d, %d\n", data[0], data[1]);
}
3.3 采樣率和精度設定
簡單的說想要更高的ADC精度(位數),就得提高脈寬(增加ADC的采樣時間),但是脈寬又會受限制于采樣率,如果采樣率太高,這個每個周期的時間短可能太短,就不足以滿足高采樣率的脈寬要求,所以具體的設定參考下表:
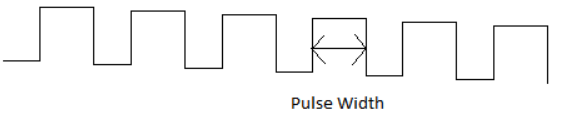
圖4 脈寬示意圖
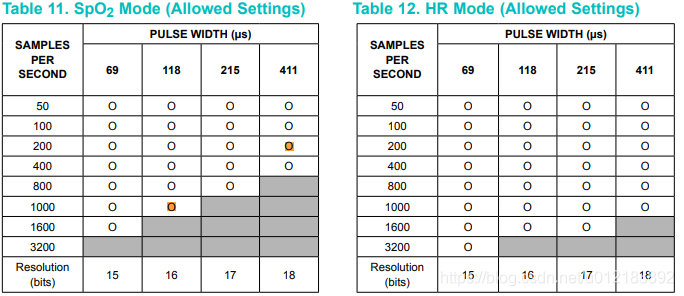
圖5 兩種模式各自允許設定采樣率表
由上表可知,如果我們在SpO2模式想要ADC的精度為 18bits,脈寬只能為400us,且采樣率最高只能到400Hz,兩個LED的點亮時序如下圖所示:
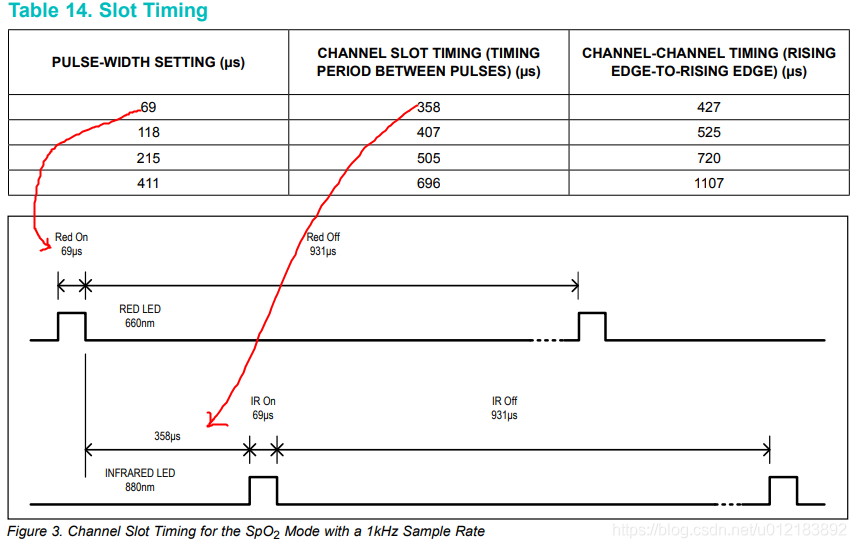
圖6 兩路LED的開啟時序
四、接近檢測功能(Proximity Mode)
通過以上的配置我們已經可以實作兩路(紅光和紅外)PPG的采集,但是為了優化設備的體驗,我們期望當手指離開傳感器后,能夠自動關閉LED,待手指插入后能自動開啟繼續采集,這樣可以做到省電且減少紅外的釋放,所以我們需要能夠自動的調節血氧傳感器的開啟和停止,而這個的實作就依賴于「接近檢測功能」,
「接近檢測功能」可以由硬體(傳感器本身的Proximity Mode功能)或者軟體(應用程式控制LED電流)兩種方法實作,基本原理都一樣:就是當 紅外/紅燈 的接收光線低于某一閥值后(表示手指離開),我們就將紅燈熄滅,同時降低紅外電流且降低采樣率,這樣達到不漏光且省電的效果,這個時候紅外作業在低采樣率階段,如果這時有手指接入,如果達到啟動閥值,則重新開始正常的采樣,恢復采樣率和紅光/紅外電流,
4.1 硬體實作(不推薦)
實際測驗發現,MAX30102其接近功能只能使用紅光去做接近檢測,所以就算手指拔出進入「接近模式」也會有紅色的光發散出來,影響體驗所以不推薦,但還是簡要的說明其操作步驟:
- 先將 MODE 設定為「SpO2/HR 模式」;
- 將 PROX_INT_EN 置為 1;(必須的!相當于使能硬體的Proximity Mode功能,置0則不會進入接近模式,直接資料采集);
- 設定手指離開后,傳感器進入「接近模式」后的紅色LED電流大小:PILOT_PA ;
- 設定手指插入后,傳感器恢復「SpO2/HR 模式」的閥值:PROX_INT_THRESH;
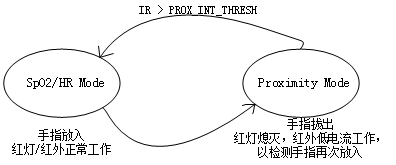
圖7 兩個作業模式的轉換
主要暫存器配置如下:
MAX30102_Write_Byte(MODE_CONFIG, 0X40); //RESET FIRST
am_util_delay_ms(20);
MAX30102_Write_Byte(INTERRUPT_ENABLE1, 0xD0); // A_FULL_EN, PPG_RDY_EN, PROX_INT_EN set to 1.
MAX30102_Write_Byte(INTERRUPT_ENABLE2, 0x02); //TEMP RDY EN 0x02
MAX30102_Write_Byte(FIFO_WR_PTR, 0x00); //recommend to clear first
MAX30102_Write_Byte(OVERFLOW_COUNTER, 0x00); //recommend to clear first
MAX30102_Write_Byte(FIFO_RE_PTR, 0x00); //recommend to clear first
MAX30102_Write_Byte(FIFO_CONFIG, 0x0f); //sample avg = 1, fifo rollover=false, fifo almost full = 17
MAX30102_Write_Byte(MODE_CONFIG, 0x03); //SpO2 mode. RED and IR
MAX30102_Write_Byte(SPO2_CONFIG, 0x2B); //SPO2_ADC range = 4096nA, 200Hz, LED pulseWidth (411uS) ,18bit
MAX30102_Write_Byte(DIE_TEMP_CONFIG, 0x01); //TEMP_EN set 1.
MAX30102_Write_Byte(LED1_PULSE_AMP, 0X40); //Choose value for ~ 13mA for LED1(red)
MAX30102_Write_Byte(LED2_PULSE_AMP, 0X40); //Choose value for ~ 13mA for LED2(ir)
MAX30102_Write_Byte(PILOT_PA, 0x01); //Choose value for ~ 0.2mA for Pilot LED (IR)
MAX30102_Write_Byte(PROX_INT_THRESH, 0x01); //喚醒血氧LED的閥值
MAX30102_Read_Byte(INTERRUPT_STATUS1); //clear int flag first.不然可能無法進中斷
MAX30102_Read_Byte(INTERRUPT_STATUS2);上述配置后,由于 PROX_INT_EN 已經置1,所以設備開機即進入「接近模式」,可以看到紅色燈微微亮起(此時紅外沒有作業),此時紅燈電流大小就是我們 PILOT_PA 暫存器設定的值,如果此時有手指插入,使紅色接收管大于 PROX_INT_THRESH 設定的值,那么就會進入 「SpO2/HR 模式」,開始正常采集,
開始正常采集后,就算手指離開探頭也不會自動進入「接近模式」,想要進入需要我們手動的再次寫 MODE 暫存器:MAX30102_Write_Byte(MODE_CONFIG, 0x03); 至于何時寫 MODE 暫存器,需要應用程式通過用戶設定的閥值去判斷,
4.2 軟體實作(推薦)
如果使用軟體實作接近檢測,我們就可以使用紅外燈去做接近檢測,這樣肉眼就看不到紅外光,更合理,
主要思路是:我們初始化時只點亮紅外燈,關閉紅燈(驅動電流設為0),然后在 Data DRDY 的中斷里,根據自己設定的紅外閥值去需要此時是否有手指插入,如果超過閥值就設定兩個 LED 的為正常采樣率、電流大小;如果再次低于閥值則關閉紅燈,降低紅外的采樣率和電流降低功耗,
步驟:1. Initial Setting – SW proximity mode
開機后,先關閉紅燈,紅外燈5ms電流,調低采樣率,等待手指插入,
// 主要暫存器配置
//暫存器地址 設定引數
0x0C 0x00 //RED LED: 0mA
0x0D 0x19 //IR LED: 5mA
0x0A 0x43 //SPO2 CONFIGURATION
//SPO2_ADC_RGE : 8uA (this is a good starting point, try other settings in order to fine tune your design),
//SPO2_SR : 50HZ, LED_PW : 400us
0x08 0x00 //FIFO CONFIG
0x11 0x12 //Multi-LED 1
0x12 0x00 //Multi-LED 2
0x04 0x00 //FIFO RESET
0x05 0x00 //FIFO RESET
0x06 0x00 //FIFO RESET
0x09 0x07 //Mode Configuration : Multi-LED Mode
0x02 0x40 //PPG RDY Interrupt Enable
current mode = proximity2.在 DRDY IRQ Handler的中斷里面去判斷手指拔出與否,如果有手指則進入正常的采集模式,開啟紅燈,恢復高采樣率,
// 主要暫存器配置(中斷偽代碼)
// Read 6 bytes from FIFO(first 3bytes : IR, next 3bytes : RED)
if ( IR Count > 2000 and current mode == proximity ) { // 進入正常采集模式
0x0C 0x? //RED LED: desired LED current for RED
0x0D 0x? //IR LED: desired LED current for IR
0x0A 0x4E //SPO2 CONFIGURATION SPO2_ADC_RGE : 8uA, SPO2_SR : 400HZ, LED_PW : 400us
0x08 0x40 //FIFO CONFIG : SMP_AVG : 4 Samples : 100 Hz ODR
current mode = HRM_SPO2
}
else if ( IR Count < 5000 and current mode == HRM_SPO2 ) { // 進入接近模式(待手指插入)
0x0C 0x00 //RED LED: 0mA
0x0D 0x19 //IR LED: 5mA
0x0A 0x43 //SPO2 CONFIGURATION SPO2_ADC_RGE : 8uA, SPO2_SR : 50HZ, LED_PW : 400us
0x04 0x00 //FIFO RESET
0x05 0x00 //FIFO RESET
0x06 0x00 //FIFO RESET
0x08 0x00 //FIFO CONFIG
current mode = proximity
}需要注意,程式中 2000 和 5000 這兩個閥值需要根據實際的情況去設定,
4.3 最終效果
兩路PPG實時波形效果(藍色曲線為紅光,白色線為紅外):可以看出放入手指后,由于有反射,接收到的電流顯著增大,
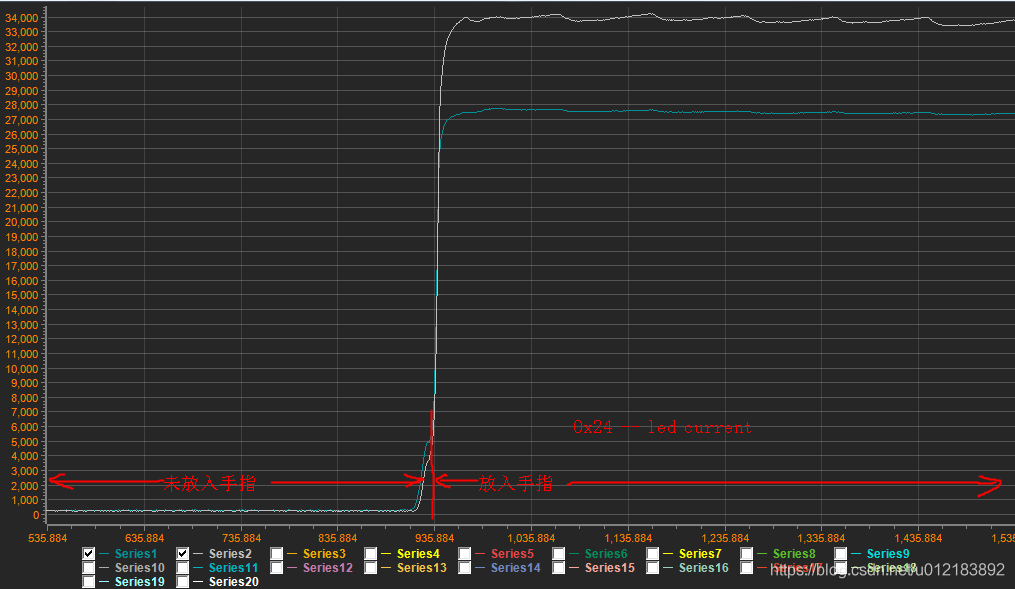
圖8 對比手指插入后ppg的變化
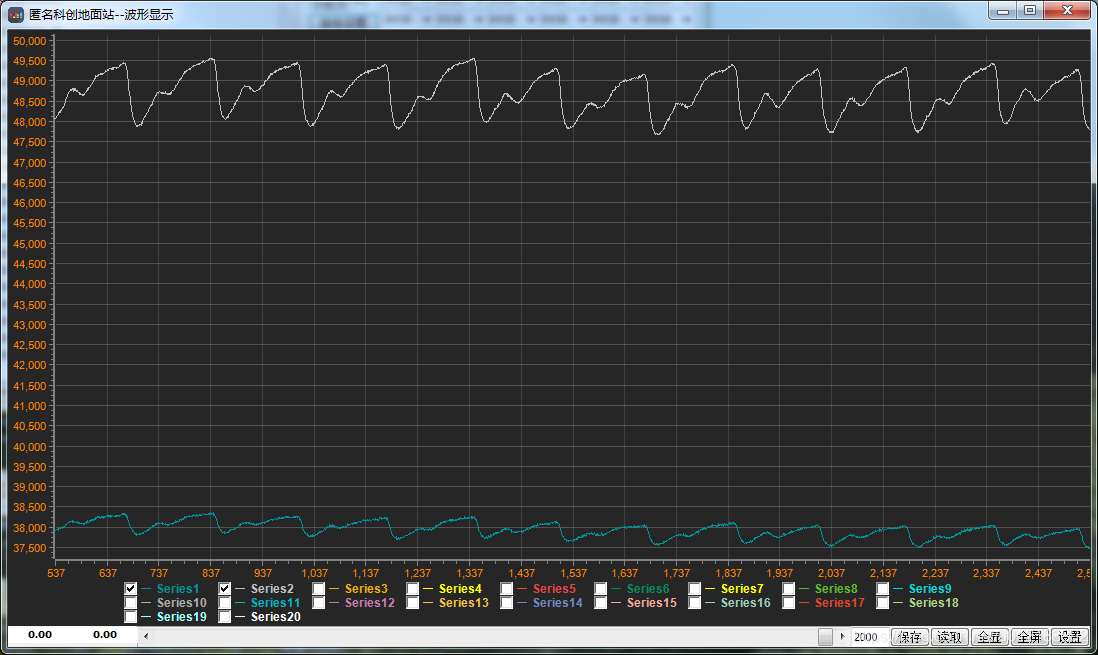
圖9 兩路PPG細節(白色-紅外,綠色-紅光)
參考資料
[1] Proximity mode
[2] Pulse oximetry: Understanding its basic principles facilitates appreciation of its limitations
[3] GUIDELINES FOR SPO2 MEASUREMENT
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/206609.html
標籤:其他
上一篇:【匯編】用匯編語言實作32位回圈冗余校檢和(CRC-32)
下一篇:四旋翼控制系統建模