無人機自主物體跟隨/循跡
- 1. 物體跟蹤
- 1.1 實作思路
- 1.2 代碼示例
- 2. 自主尋線
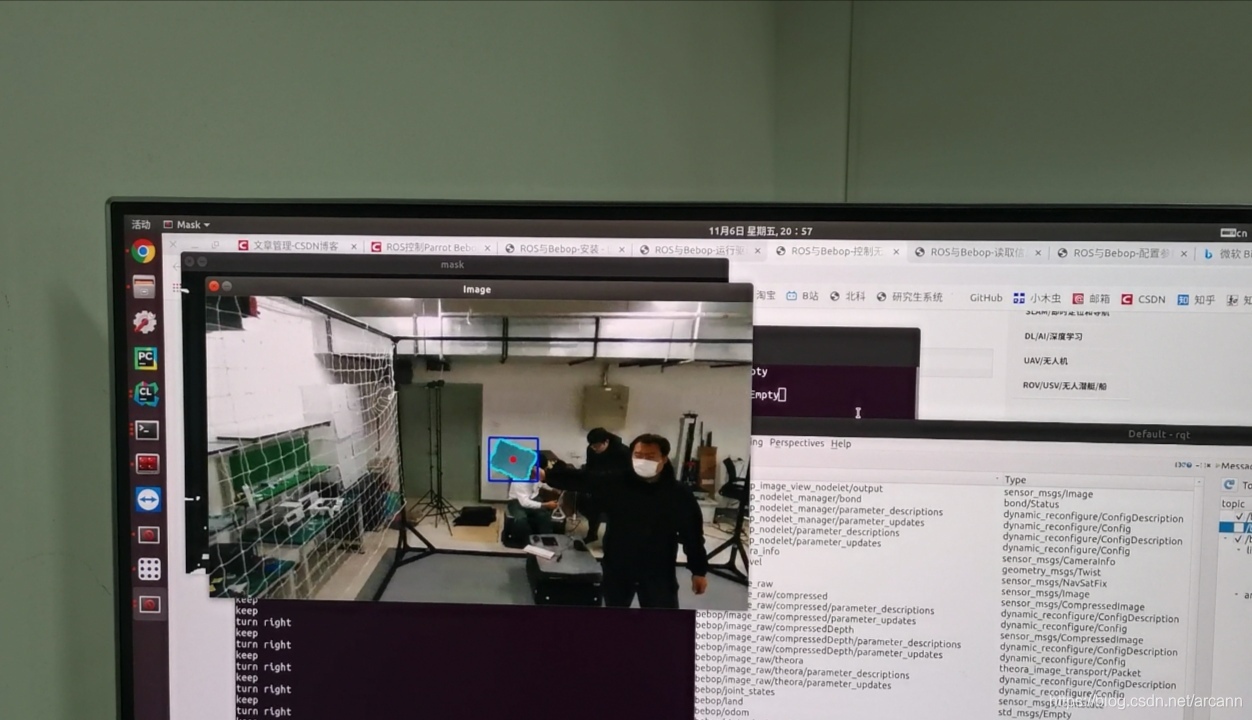
- 本實驗采用ROS和OpenCV實作功能,實驗平臺采用Parrot的Bebop2無人機
- ROS部分的學習可以參考我的專欄:ROS學習記錄
- 實驗平臺的操作方式見:ROS控制Parrot Bebop2無人機
1. 物體跟蹤
1.1 實作思路
呼叫無人機的影像:
cv_image = self.bridge.imgmsg_to_cv2(data, “bgr8”)
之后同OpenCV實作機器人對物體進行移動跟隨一樣,獲取所要跟蹤的物體
節點的發布和接收見:ROS學習: Topic通訊
1.2 代碼示例
import rospy
import cv2 as cv
from geometry_msgs.msg import Twist
from cv_bridge import CvBridge, CvBridgeError
from sensor_msgs.msg import Image
class image_converter:
def __init__(self):
self.cmd_pub = rospy.Publisher("/bebop/cmd_vel", Twist, queue_size=1) # 發布運動控制資訊
self.bridge = CvBridge()
self.image_sub = rospy.Subscriber("/bebop/image_raw", Image, self.callback) # 訂閱攝像頭資訊
def callback(self, data):
try:
cv_image = self.bridge.imgmsg_to_cv2(data, "bgr8") # 獲取訂閱的攝像頭影像
except CvBridgeError as e:
print e
# 對影像進行處理
kernel = cv.getStructuringElement(cv.MORPH_RECT, (3, 3)) # 定義結構元素
height, width = cv_image.shape[0:2]
screen_center = width / 2
screen_center_h = height / 2
offset = 50
offset_h = 30
lower_b = (75, 43, 46)
upper_b = (110, 255, 255)
hsv_frame = cv.cvtColor(cv_image, cv.COLOR_BGR2HSV) # 轉成HSV顏色空間
mask = cv.inRange(hsv_frame, lower_b, upper_b)
mask2 = cv.morphologyEx(mask, cv.MORPH_OPEN, kernel) # 開運算去噪
mask3 = cv.morphologyEx(mask2, cv.MORPH_CLOSE, kernel) # 閉運算去噪
cv.imshow("mask", mask3)
# 找出面積最大的區域
_, contours, _ = cv.findContours(mask3, cv.RETR_EXTERNAL, cv.CHAIN_APPROX_SIMPLE)
maxArea = 0
maxIndex = 0
for i, c in enumerate(contours):
area = cv.contourArea(c)
if area > maxArea:
maxArea = area
maxIndex = i
# 繪制輪廓
cv.drawContours(cv_image, contours, maxIndex, (255, 255, 0), 2)
# 獲取外切矩形
x, y, w, h = cv.boundingRect(contours[maxIndex])
cv.rectangle(cv_image, (x, y), (x + w, y + h), (255, 0, 0), 2)
# 獲取中心像素點
center_x = int(x + w / 2)
center_y = int(y + h / 2)
cv.circle(cv_image, (center_x, center_y), 5, (0, 0, 255), -1)
# 顯示影像
cv.imshow("Image", cv_image)
# 運動控制
twist = Twist()
# 左右轉向和移動
if center_x < screen_center - offset:
twist.linear.x = 0.0
twist.linear.y = 0.2
twist.angular.z = 0.2
print "turn left"
elif screen_center - offset <= center_x <= screen_center + offset:
twist.linear.x = 0.0
twist.linear.y = 0.0
twist.angular.z = 0
print "keep"
elif center_x > screen_center + offset:
twist.linear.x = 0.0
twist.linear.y = -0.2
twist.angular.z = -0.2
print "turn right"
else:
twist.linear.x = 0
twist.angular.z = 0
print "stop"
# 上下移動
if center_y < screen_center_h - offset_h:
twist.linear.z = 0.2
print "up up up"
elif screen_center_h - offset_h <= center_y <= screen_center_h + offset_h:
twist.linear.z = 0
print "keep"
elif center_y > screen_center_h + offset_h:
twist.linear.z = -0.2
print "down down down"
else:
twist.linear.z = 0
print "stop"
cv.waitKey(3)
# 發布運動指令
try:
self.cmd_pub.publish(twist)
except CvBridgeError as e:
print e
if __name__ == '__main__':
try:
rospy.init_node("cv_bridge_test")
rospy.loginfo("Starting cv_bridge_test node")
image_converter()
rospy.spin()
except KeyboardInterrupt:
print "Shutting down cv_bridge_test node."
cv.destroyAllWindows()
效果圖

2. 自主尋線
將上節的物體識別改為所尋線,運動控制左右移動/轉向,剩下就是調參的事情了
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/209017.html
標籤:AI
上一篇:Python高階函式與裝飾器函式