該系列文章是講解Python OpenCV影像處理知識,前期主要講解影像入門、OpenCV基礎用法,中期講解影像處理的各種演算法,包括影像銳化算子、影像增強技術、影像分割等,后期結合深度學習研究影像識別、影像分類應用,希望文章對您有所幫助,如果有不足之處,還請海涵~
前面一篇文章介紹了MoviePy視頻編輯庫,實作視頻的自定義剪切和合并操作;這篇文章將詳細講解影像量化及采樣處理,萬字長文吐血整理,同時,該部分知識均為秀璋查閱資料撰寫整理,并且開設成了收費專欄,為小寶賺點奶粉錢,當然如果您是學生或者經濟拮據,可以私聊我給你每篇文章開白名單,或者轉發原文給你,更多的是希望您心甘情愿的打賞及進步,一起加油喔~
該系列在github所有源代碼:
- https://github.com/eastmountyxz/ImageProcessing-Python
前文參考:
[Python影像處理] 一.影像處理基礎知識及OpenCV入門函式
[Python影像處理] 二.OpenCV+Numpy庫讀取與修改像素
[Python影像處理] 三.獲取影像屬性、興趣ROI區域及通道處理
[Python影像處理] 四.影像平滑之均值濾波、方框濾波、高斯濾波及中值濾波
[Python影像處理] 五.影像融合、加法運算及影像型別轉換
[Python影像處理] 六.影像縮放、影像旋轉、影像翻轉與影像平移
[Python影像處理] 七.影像閾值化處理及演算法對比
[Python影像處理] 八.影像腐蝕與影像膨脹
[Python影像處理] 九.形態學之影像開運算、閉運算、梯度運算
[Python影像處理] 十.形態學之影像頂帽運算和黑帽運算
[Python影像處理] 十一.灰度直方圖概念及OpenCV繪制直方圖
[Python影像處理] 十二.影像幾何變換之影像仿射變換、影像透視變換和影像校正
[Python影像處理] 十三.基于灰度三維圖的影像頂帽運算和黑帽運算
[Python影像處理] 十四.基于OpenCV和像素處理的影像灰度化處理
[Python影像處理] 十五.影像的灰度線性變換
[Python影像處理] 十六.影像的灰度非線性變換之對數變換、伽馬變換
[Python影像處理] 十七.影像銳化與邊緣檢測之Roberts算子、Prewitt算子、Sobel算子和Laplacian算子
[Python影像處理] 十八.影像銳化與邊緣檢測之Scharr算子、Canny算子和LOG算子
[Python影像處理] 十九.影像分割之基于K-Means聚類的區域分割
[Python影像處理] 二十.影像量化處理和采樣處理及區域馬賽克特效
[Python影像處理] 二十一.影像金字塔之影像向下取樣和向上取樣
[Python影像處理] 二十二.Python影像傅里葉變換原理及實作
[Python影像處理] 二十三.傅里葉變換之高通濾波和低通濾波
[Python影像處理] 二十四.影像特效處理之毛玻璃、浮雕和油漆特效
[Python影像處理] 二十五.影像特效處理之素描、懷舊、光照、流年以及濾鏡特效
[Python影像處理] 二十六.影像分類原理及基于KNN、樸素貝葉斯演算法的影像分類案例
[Python影像處理] 二十七.OpenGL入門及繪制基本圖形(一)
[Python影像處理] 二十八.OpenCV快速實作人臉檢測及視頻中的人臉
[Python影像處理] 二十九.MoviePy視頻編輯庫實作抖音短視頻剪切合并操作
文章目錄
- 一.影像量化處理
- 1.概述
- 2.操作
- 3.K-Means聚類量化處理
- 二.影像采樣處理
- 1.概述
- 2.操作
- 3.區域馬賽克處理
- 三.影像金字塔
- 1.影像向下取樣
- 2.影像向上取樣
- 四.本章小結
影像通常是自然界景物的客觀反映,并以照片形式或視頻記錄的介質連續保存,獲取影像的目標是從感知的資料中產生數字影像,因此需要把連續的影像資料離散化,轉換為數字化影像,其作業主要包括兩方面——量化和采樣,數字化幅度值稱為量化,數字化坐標值稱為采樣,本文主要講解影像量化和采樣處理的概念,并通過Python和OpenCV實作這些功能,
一.影像量化處理
1.概述
所謂量化(Quantization),就是將影像像素點對應亮度的連續變化區間轉換為單個特定值的程序,即將原始灰度影像的空間坐標幅度值離散化,量化等級越多,影像層次越豐富,灰度解析度越高,影像的質量也越好;量化等級越少,影像層次欠豐富,灰度解析度越低,會出現影像輪廓分層的現象,降低了影像的質量,圖1是將影像的連續灰度值轉換為0至255的灰度級的程序,
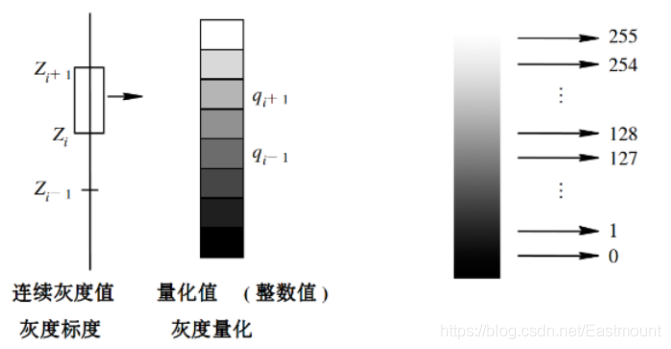
如果量化等級為2,則將使用兩種灰度級表示原始圖片的像素(0-255),灰度值小于128的取0,大于等于128的取128;如果量化等級為4,則將使用四種灰度級表示原始圖片的像素,新影像將分層為四種顏色,0-64區間取0,64-128區間取64,128-192區間取128,192-255區間取192,依次類推,
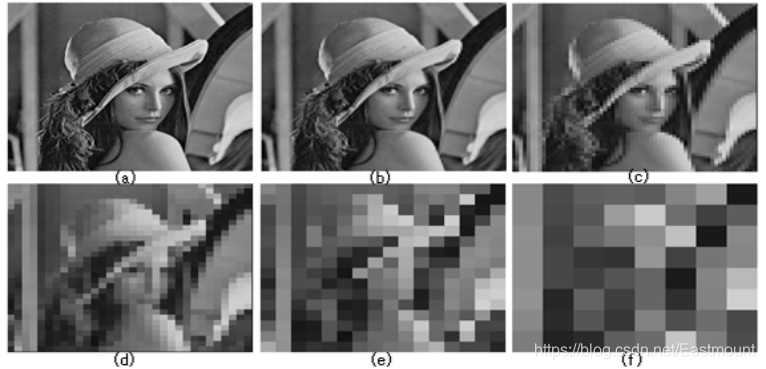
圖2是對比不同量化等級的“Lena”圖,其中(a)的量化等級為256,(b)的量化等級為64,(c)的量化等級為16,(d)的量化等級為8,(e)的量化等級為4,(f)的量化等級為2,

2.操作
下面講述Python影像量化處理相關代碼操作,其核心流程是建立一張臨時圖片,接著回圈遍歷原始影像中所有像素點,判斷每個像素點應該屬于的量化等級,最后將臨時影像顯示,下列代碼將灰度影像轉換為兩種量化等級,
# -*- coding: utf-8 -*-
# BY:Eastmount CSDN 2020-11-10
import cv2
import numpy as np
import matplotlib.pyplot as plt
#讀取原始影像
img = cv2.imread('lena.png')
#獲取影像高度和寬度
height = img.shape[0]
width = img.shape[1]
#創建一幅影像
new_img = np.zeros((height, width, 3), np.uint8)
#影像量化操作 量化等級為2
for i in range(height):
for j in range(width):
for k in range(3): #對應BGR三分量
if img[i, j][k] < 128:
gray = 0
else:
gray = 128
new_img[i, j][k] = np.uint8(gray)
#顯示影像
cv2.imshow("src", img)
cv2.imshow("Quantization", new_img)
#等待顯示
cv2.waitKey(0)
cv2.destroyAllWindows()
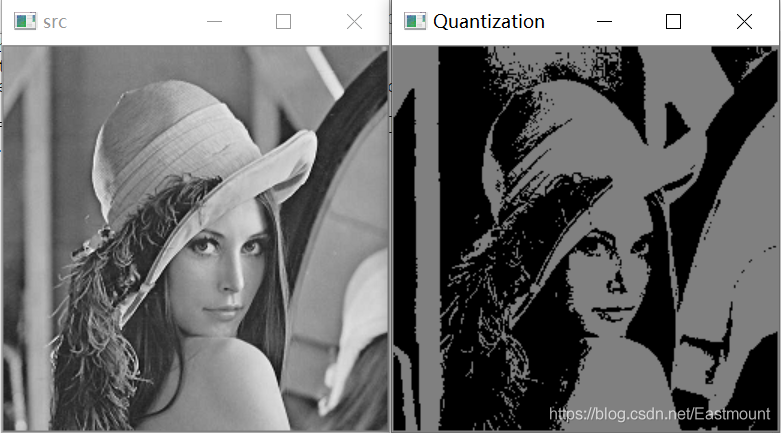
其輸出結果如圖3所示,它將灰度影像劃分為兩種量化等級,
下面的代碼分別比較了量化等級為2、4、8的量化處理效果,
# -*- coding: utf-8 -*-
# BY:Eastmount CSDN 2020-11-10
import cv2
import numpy as np
import matplotlib.pyplot as plt
#讀取原始影像
img = cv2.imread('lena.png')
#獲取影像高度和寬度
height = img.shape[0]
width = img.shape[1]
#創建一幅影像
new_img1 = np.zeros((height, width, 3), np.uint8)
new_img2 = np.zeros((height, width, 3), np.uint8)
new_img3 = np.zeros((height, width, 3), np.uint8)
#影像量化等級為2的量化處理
for i in range(height):
for j in range(width):
for k in range(3): #對應BGR三分量
if img[i, j][k] < 128:
gray = 0
else:
gray = 128
new_img1[i, j][k] = np.uint8(gray)
#影像量化等級為4的量化處理
for i in range(height):
for j in range(width):
for k in range(3): #對應BGR三分量
if img[i, j][k] < 64:
gray = 0
elif img[i, j][k] < 128:
gray = 64
elif img[i, j][k] < 192:
gray = 128
else:
gray = 192
new_img2[i, j][k] = np.uint8(gray)
#影像量化等級為8的量化處理
for i in range(height):
for j in range(width):
for k in range(3): #對應BGR三分量
if img[i, j][k] < 32:
gray = 0
elif img[i, j][k] < 64:
gray = 32
elif img[i, j][k] < 96:
gray = 64
elif img[i, j][k] < 128:
gray = 96
elif img[i, j][k] < 160:
gray = 128
elif img[i, j][k] < 192:
gray = 160
elif img[i, j][k] < 224:
gray = 192
else:
gray = 224
new_img3[i, j][k] = np.uint8(gray)
#用來正常顯示中文標簽
plt.rcParams['font.sans-serif']=['SimHei']
#顯示影像
titles = ['(a) 原始影像', '(b) 量化-L2', '(c) 量化-L4', '(d) 量化-L8']
images = [img, new_img1, new_img2, new_img3]
for i in range(4):
plt.subplot(2,2,i+1), plt.imshow(images[i], 'gray'),
plt.title(titles[i])
plt.xticks([]),plt.yticks([])
plt.show()
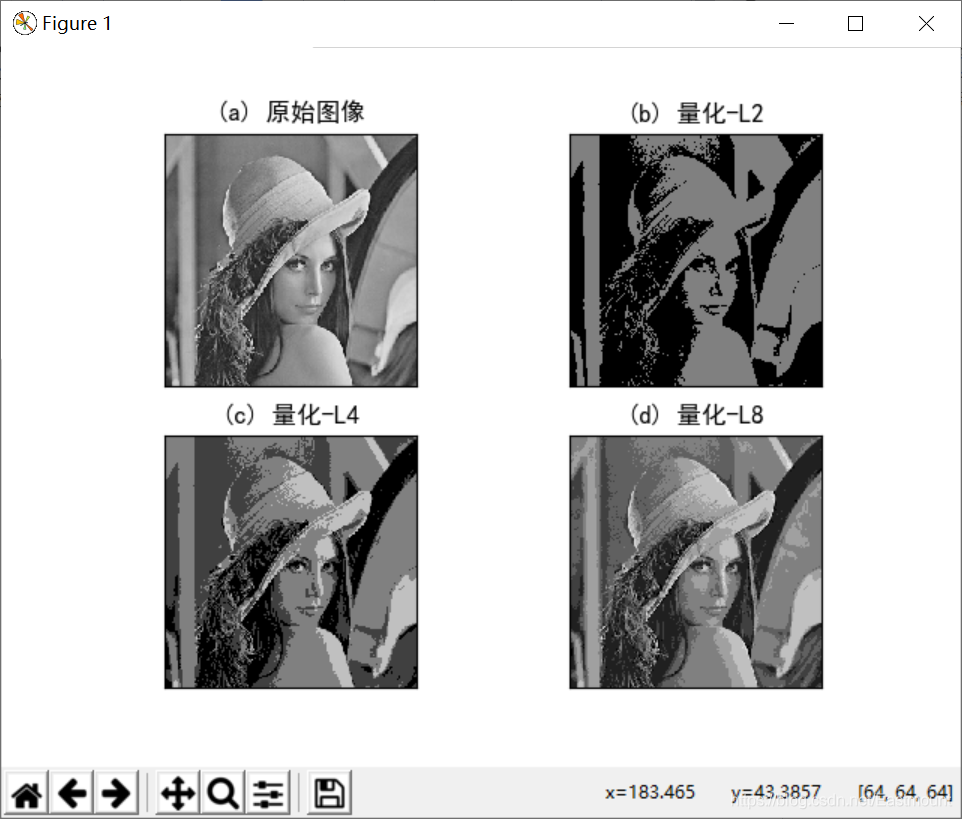
輸出結果如圖4所示,該代碼呼叫matplotlib.pyplot庫繪制了四幅影像,其中(a)表示原始影像,(b)表示等級為2的量化處理,(c)表示等級為4的量化處理,(d)表示等級為8的量化處理,
3.K-Means聚類量化處理
上一小節的量化處理是通過遍歷影像中的所有像素點,進行灰度影像的幅度值離散化處理,本小節補充一個基于K-Means聚類演算法的量化處理程序,它能夠將彩色影像RGB像素點進行顏色分割和顏色量化,注意,在第十九篇文章時詳細介紹了K-Means聚類知識,本小節只是帶領讀者重新回顧下該方法,
# coding: utf-8
# BY:Eastmount CSDN 2020-11-10
import cv2
import numpy as np
import matplotlib.pyplot as plt
#讀取原始影像
img = cv2.imread('nv.png')
#影像二維像素轉換為一維
data = img.reshape((-1,3))
data = np.float32(data)
#定義中心 (type,max_iter,epsilon)
criteria = (cv2.TERM_CRITERIA_EPS +
cv2.TERM_CRITERIA_MAX_ITER, 10, 1.0)
#設定標簽
flags = cv2.KMEANS_RANDOM_CENTERS
#K-Means聚類 聚集成4類
compactness, labels, centers = cv2.kmeans(data, 4, None, criteria, 10, flags)
#影像轉換回uint8二維型別
centers = np.uint8(centers)
res = centers[labels.flatten()]
dst = res.reshape((img.shape))
#影像轉換為RGB顯示
img = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
dst = cv2.cvtColor(dst, cv2.COLOR_BGR2RGB)
#用來正常顯示中文標簽
plt.rcParams['font.sans-serif']=['SimHei']
#顯示影像
titles = ['原始影像', '聚類量化 K=4']
images = [img, dst]
for i in range(2):
plt.subplot(1,2,i+1), plt.imshow(images[i], 'gray'),
plt.title(titles[i])
plt.xticks([]),plt.yticks([])
plt.show()
輸出結果如圖5所示,它通過K-Means聚類演算法將彩色人物影像的灰度聚集成四種顏色,

二.影像采樣處理
1.概述
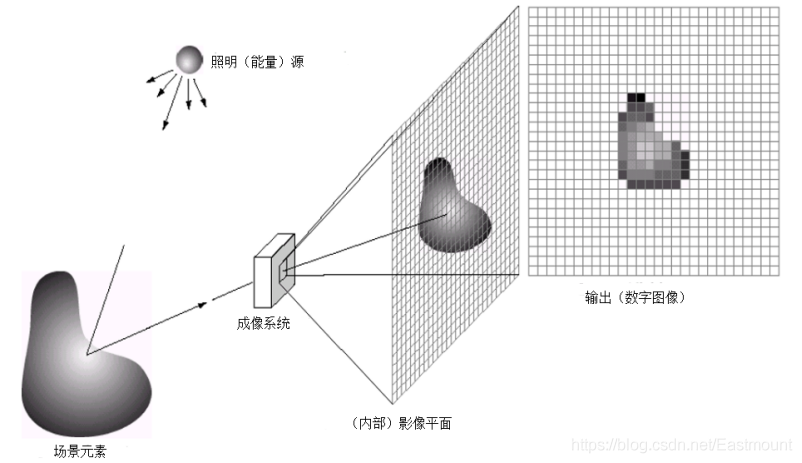
影像采樣(Image Sampling)處理是將一幅連續影像在空間上分割成M×N個網格,每個網格用一個亮度值或灰度值來表示,其示意圖如圖6所示,
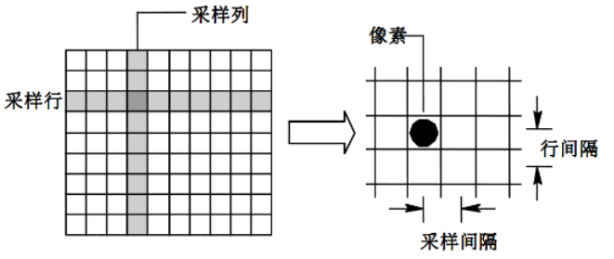
影像采樣的間隔越大,所得影像像素數越少,空間解析度越低,影像質量越差,甚至出現馬賽克效應;相反,影像采樣的間隔越小,所得影像像素數越多,空間解析度越高,影像質量越好,但資料量會相應的增大,圖7展示了不同采樣間隔的“Lena”圖,其中圖(a)為原始影像,圖(b)為128×128的影像采樣效果,圖?為64×64的影像采樣效果,圖(d)為32×32的影像采樣效果,圖(e)為16×16的影像采樣效果,圖(f)為8×8的影像采樣效果,
數字影像的質量很大程度上取決于量化和采樣中所采用的樣本數和灰度級,現實生活中的影像,都需要經過離散化處理轉換成數字影像,從而進行后續的計算機處理和影像識別等操作,圖8展示了生活影像轉換為數字影像的程序,
2.操作
下面講述Python影像采樣處理相關代碼操作,其核心流程是建立一張臨時圖片,設定需要采樣的區域大小(如16×16),接著回圈遍歷原始影像中所有像素點,采樣區域內的像素點賦值相同(如左上角像素點的灰度值),最終實作影像采樣處理,下列代碼是進行16×16采樣的程序,
# -*- coding: utf-8 -*-
# BY:Eastmount CSDN 2020-11-10
import cv2
import numpy as np
import matplotlib.pyplot as plt
#讀取原始影像
img = cv2.imread('lena.png')
#獲取影像高度和寬度
height = img.shape[0]
width = img.shape[1]
#采樣轉換成16*16區域
numHeight = int(height/16)
numWidth = int(width/16)
#創建一幅影像
new_img = np.zeros((height, width, 3), np.uint8)
#影像回圈采樣16*16區域
for i in range(16):
#獲取Y坐標
y = i*numHeight
for j in range(16):
#獲取X坐標
x = j*numWidth
#獲取填充顏色 左上角像素點
b = img[y, x][0]
g = img[y, x][1]
r = img[y, x][2]
#回圈設定小區域采樣
for n in range(numHeight):
for m in range(numWidth):
new_img[y+n, x+m][0] = np.uint8(b)
new_img[y+n, x+m][1] = np.uint8(g)
new_img[y+n, x+m][2] = np.uint8(r)
#顯示影像
cv2.imshow("src", img)
cv2.imshow("Sampling", new_img)
#等待顯示
cv2.waitKey(0)
cv2.destroyAllWindows()
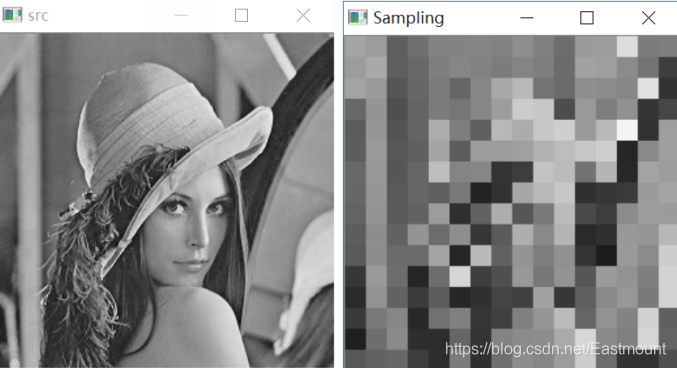
其輸出結果如圖8所示,它將灰度影像采樣成16×16的區域,
同樣,可以對彩色影像進行采樣處理,下面的代碼將彩色風景影像采樣處理成8×8的馬賽克區域,
# -*- coding: utf-8 -*-
# BY:Eastmount CSDN 2020-11-10
import cv2
import numpy as np
import matplotlib.pyplot as plt
#讀取原始影像
img = cv2.imread('scenery.png')
#獲取影像高度和寬度
height = img.shape[0]
width = img.shape[1]
#采樣轉換成8*8區域
numHeight = int(height/8)
numwidth = int(width/8)
#創建一幅影像
new_img = np.zeros((height, width, 3), np.uint8)
#影像回圈采樣8*8區域
for i in range(8):
#獲取Y坐標
y = i*numHeight
for j in range(8):
#獲取X坐標
x = j*numwidth
#獲取填充顏色 左上角像素點
b = img[y, x][0]
g = img[y, x][1]
r = img[y, x][2]
#回圈設定小區域采樣
for n in range(numHeight):
for m in range(numwidth):
new_img[y+n, x+m][0] = np.uint8(b)
new_img[y+n, x+m][1] = np.uint8(g)
new_img[y+n, x+m][2] = np.uint8(r)
#顯示影像
cv2.imshow("src", img)
cv2.imshow("Sampling", new_img)
#等待顯示
cv2.waitKey(0)
cv2.destroyAllWindows()
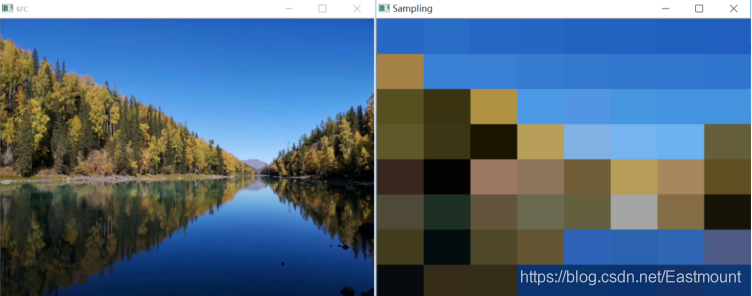
其輸出結果如圖9所示,它將彩色風景影像采樣成8×8的區域,
但上述代碼存在一個問題,當影像的長度和寬度不能被采樣區域整除時,輸出影像的最右邊和最下邊的區域沒有被采樣處理,這里推薦讀者做個求余運算,將不能整除部分的區域也進行相應的采樣處理,
3.區域馬賽克處理
前面講述的代碼是對整幅影像進行采樣處理,那么如何對影像的區域區域進行馬賽克處理呢?下面的代碼就實作了該功能,當滑鼠按下時,它能夠給滑鼠拖動的區域打上馬賽克,并按下“s”鍵保存影像至本地,
# -- coding:utf-8 --
# BY:Eastmount CSDN 2020-11-10
import cv2
import numpy as np
import matplotlib.pyplot as plt
#讀取原始影像
im = cv2.imread('people.png', 1)
#設定滑鼠左鍵開啟
en = False
#滑鼠事件
def draw(event, x, y, flags, param):
global en
#滑鼠左鍵按下開啟en值
if event==cv2.EVENT_LBUTTONDOWN:
en = True
#滑鼠左鍵按下并且移動
elif event==cv2.EVENT_MOUSEMOVE and flags==cv2.EVENT_LBUTTONDOWN:
#呼叫函式打馬賽克
if en:
drawMask(y,x)
#滑鼠左鍵彈起結束操作
elif event==cv2.EVENT_LBUTTONUP:
en = False
#影像區域采樣操作
def drawMask(x, y, size=10):
#size*size采樣處理
m = int(x / size * size)
n = int(y / size * size)
print(m, n)
#10*10區域設定為同一像素值
for i in range(size):
for j in range(size):
im[m+i][n+j] = im[m][n]
#打開對話框
cv2.namedWindow('image')
#呼叫draw函式設定滑鼠操作
cv2.setMouseCallback('image', draw)
#回圈處理
while(1):
cv2.imshow('image', im)
#按ESC鍵退出
if cv2.waitKey(10)&0xFF==27:
break
#按s鍵保存圖片
elif cv2.waitKey(10)&0xFF==115:
cv2.imwrite('sava.png', im)
#退出視窗
cv2.destroyAllWindows()
其輸出結果如圖10所示,它將人物的臉部進行馬賽克處理,按下S鍵保存圖片,按下ESC鍵退出,

三.影像金字塔
前面講解的影像采樣處理可以降低影像的大小,本小節將補充影像金字塔知識,了解專門用于影像向上采樣和向下采樣的pyrUp()和pyrDown()函式,
影像金字塔是指由一組影像且不同分別率的子圖集合,它是影像多尺度表達的一種,以多解析度來解釋影像的結構,主要用于影像的分割或壓縮,一幅影像的金字塔是一系列以金字塔形狀排列的解析度逐步降低,且來源于同一張原始圖的影像集合,如圖11所示,它包括了四層影像,將這一層一層的影像比喻成金字塔,影像金字塔可以通過梯次向下采樣獲得,直到達到某個終止條件才停止采樣,在向下采樣中,層級越高,則影像越小,解析度越低,
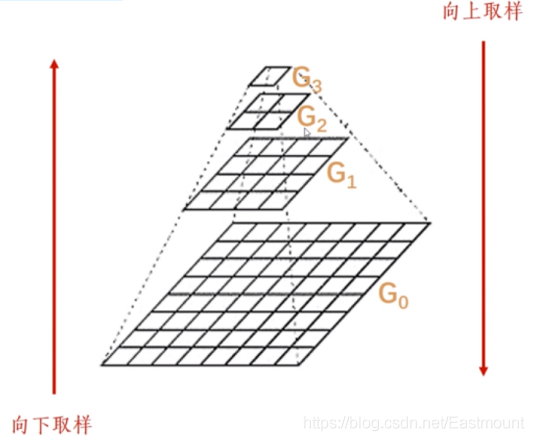
生成影像金字塔主要包括兩種方式——向下取樣、向上取樣,在圖11中,將影像G0轉換為G1、G2、G3,影像解析度不斷降低的程序稱為向下取樣;將G3轉換為G2、G1、G0,影像解析度不斷增大的程序稱為向上取樣,
1.影像向下取樣
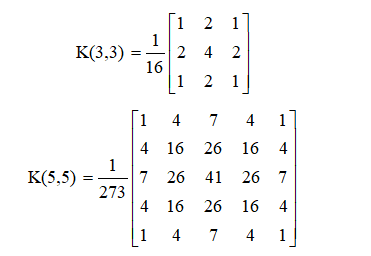
在影像向下取樣中,使用最多的是高斯金字塔,它將對影像Gi進行高斯核卷積,并洗掉原圖中所有的偶數行和列,最終縮小影像,其中,高斯核卷積運算就是對整幅影像進行加權平均的程序,每一個像素點的值,都由其本身和鄰域內的其他像素值(權重不同)經過加權平均后得到,常見的3×3和5×5高斯核如下:
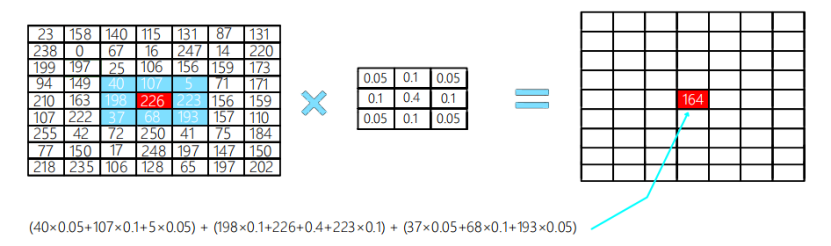
高斯核卷積讓臨近中心的像素點具有更高的重要度,對周圍像素計算加權平均值,如圖12所示,其中心位置權重最高為0.4,
顯而易見,原始影像Gi具有M×N個像素,進行向下取樣之后,所得到的影像Gi+1具有M/2×N/2個像素,只有原圖的四分之一,通過對輸入的原始影像不停迭代以上步驟就會得到整個金字塔,注意,由于每次向下取樣會洗掉偶數行和列,所以它會不停地丟失影像的資訊,
在OpenCV中,向下取樣使用的函式為pyrDown(),其原型如下所示:
- dst = pyrDown(src[, dst[, dstsize[, borderType]]])
– src表示輸入影像,
– dst表示輸出影像,和輸入影像具有一樣的尺寸和型別
– dstsize表示輸出影像的大小,默認值為Size()
– borderType表示像素外推方法,詳見cv::bordertypes
向下取樣的代碼如下所示:
# -*- coding: utf-8 -*-
# BY:Eastmount CSDN 2020-11-10
import cv2
import numpy as np
import matplotlib.pyplot as plt
#讀取原始影像
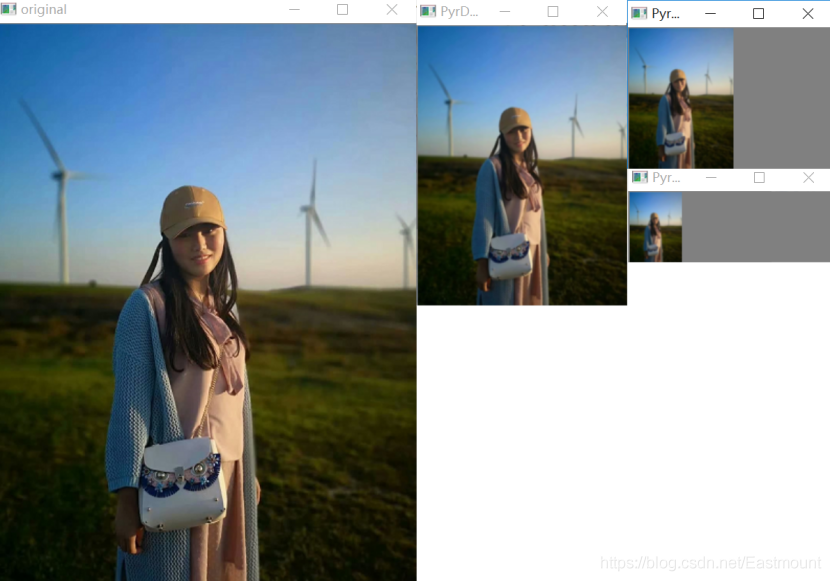
img = cv2.imread('nv.png')
#影像向下取樣
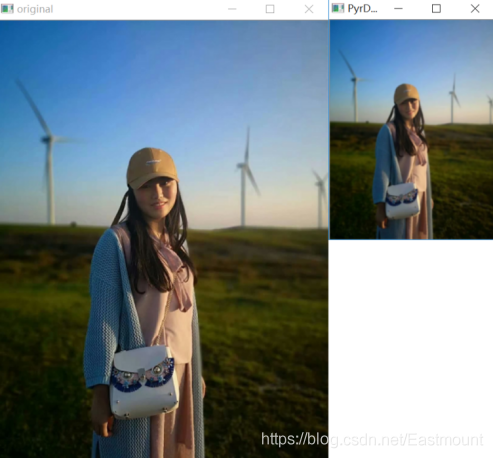
r = cv2.pyrDown(img)
#顯示影像
cv2.imshow('original', img)
cv2.imshow('PyrDown', r)
cv2.waitKey()
cv2.destroyAllWindows()
輸出結果如圖13所示,它將原始影像壓縮成原圖的四分之一,
多次向下取樣的代碼參考下列檔案,
# -*- coding: utf-8 -*-
# BY:Eastmount CSDN 2020-11-10
import cv2
import numpy as np
import matplotlib.pyplot as plt
#讀取原始影像
img = cv2.imread('nv.png')
#影像向下取樣
r1 = cv2.pyrDown(img)
r2 = cv2.pyrDown(r1)
r3 = cv2.pyrDown(r2)
#顯示影像
cv2.imshow('original', img)
cv2.imshow('PyrDown1', r1)
cv2.imshow('PyrDown2', r2)
cv2.imshow('PyrDown3', r3)
cv2.waitKey()
cv2.destroyAllWindows()
輸出結果如圖14所示,每次向下取樣均為上次的四分之一,并且影像的清晰度會降低,
2.影像向上取樣
在影像向上取樣是由小影像不斷放影像的程序,它將影像在每個方向上擴大為原影像的2倍,新增的行和列均用0來填充,并使用與“向下取樣”相同的卷積核乘以4,再與放大后的影像進行卷積運算,以獲得“新增像素”的新值,如圖15所示,它在原始像素45、123、89、149之間各新增了一行和一列值為0的像素,
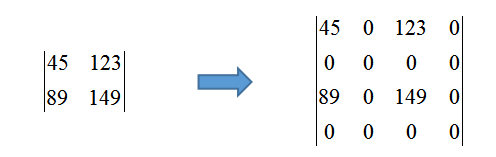
注意,向上取樣放大后的影像比原始影像要模糊,同時,向上采樣和向下采樣不是互逆的操作,經過兩種操作后,是無法恢復原始影像的,
在OpenCV中,向上取樣使用的函式為pyrUp(),其原型如下所示:
- dst = pyrUp(src[, dst[, dstsize[, borderType]]])
– src表示輸入影像,
– dst表示輸出影像,和輸入影像具有一樣的尺寸和型別
– dstsize表示輸出影像的大小,默認值為Size()
– borderType表示像素外推方法,詳見cv::bordertypes
向上取樣的代碼如下所示:
# -*- coding: utf-8 -*-
# BY:Eastmount CSDN 2020-11-10
import cv2
import numpy as np
import matplotlib.pyplot as plt
#讀取原始影像
img = cv2.imread('lena.png')
#影像向上取樣
r = cv2.pyrUp(img)
#顯示影像
cv2.imshow('original', img)
cv2.imshow('PyrUp', r)
cv2.waitKey()
cv2.destroyAllWindows()
輸出結果如圖16所示,它將原始影像擴大為原影像的四倍,即向上一次取樣,

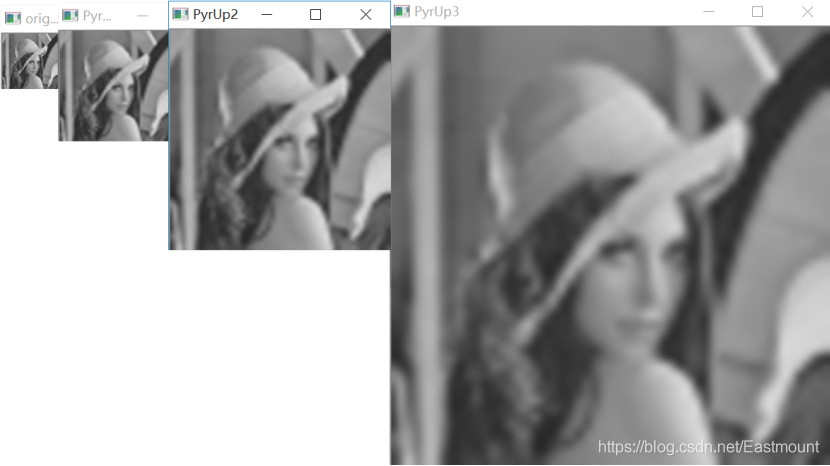
多次向上取樣的代碼參考下列檔案,
# -*- coding: utf-8 -*-
import cv2
import numpy as np
import matplotlib.pyplot as plt
#讀取原始影像
img = cv2.imread('lena2.png')
#影像向上取樣
r1 = cv2.pyrUp(img)
r2 = cv2.pyrUp(r1)
r3 = cv2.pyrUp(r2)
#顯示影像
cv2.imshow('original', img)
cv2.imshow('PyrUp1', r1)
cv2.imshow('PyrUp2', r2)
cv2.imshow('PyrUp3', r3)
cv2.waitKey()
cv2.destroyAllWindows()
輸出結果如圖17所示,每次向上取樣均為上次影像的四倍,但影像的清晰度會降低,
四.本章小結
本文主要講解了影像的量化處理和采樣處理,從基本概率到操作,再到擴展進行全方位講解,并且補充了基于K-Means聚類演算法的量化處理和區域馬賽克特效處理,最后補充了影像金字塔相關知識,該章節知識點能夠將生活中的影像轉換為數字影像,更好地為后續的影像處理提供幫助,希望這篇基礎性文章對讀者有一定幫助,也希望這些知識點為讀者從事Python影像處理相關專案實踐或科學研究提供一定基礎,
時光嘀嗒嘀嗒的流失,這是我在CSDN寫下的第八篇年終總結,比以往時候來的更早一些,《敏而多思,寧靜致遠》,僅以此篇紀念這風雨兼程的一年,這感恩的一年,列車上只寫了一半,這兩天完成,思遠,思君O(∩_∩)O
2020年8月18新開的“娜璋AI安全之家”,主要圍繞Python大資料分析、網路空間安全、人工智能、Web滲透及攻防技術進行講解,同時分享CCF、SCI、南核北核論文的演算法實作,娜璋之家會更加系統,并重構作者的所有文章,從零講解Python和安全,寫了近十年文章,真心想把自己所學所感所做分享出來,還請各位多多指教,真誠邀請您的關注!謝謝,

(By:Eastmount 2020-11-10 深夜10點夜于武漢 http://blog.csdn.net/eastmount/ )
參考文獻:
[1] 岡薩雷斯著. 數字影像處理(第3版)[M]. 北京:電子工業出版社,2013.
[2] yunfung. 數字影像基礎之影像取樣和量化(Image Sampling and Quantization)[EB/OL]. (2017-04-23). https://www.cnblogs.com/yunfung/p/6753337.html.
[3] 阮秋琦. 數字影像處理學(第3版)[M]. 北京:電子工業出版社,2008.
[4] zqhwando. 影像處理中的采樣與量化[EB/OL]. (2017-12-22). https://blog.csdn.net/zqhwando/article/details/78871140.
[5] eastmount. [數字影像處理] 三.MFC實作影像灰度、采樣和量化功能詳解[EB/OL]. (2015-05-28). https://blog.csdn.net/eastmount/article/details/46010637.
[6] 師寇. Python + opencv 實作圖片馬賽克[EB/OL]. (2017-11-08). https://blog.csdn.net/weixin_38283159/article/details/78479791.
[7] 毛星云,冷雪飛. OpenCV3編程入門[M]. 北京:電子工業出版社,2015.
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/212970.html
標籤:其他