作業一 遞推最小二乘法引數辨識
設被辨識系統的數學模型由下式描述:
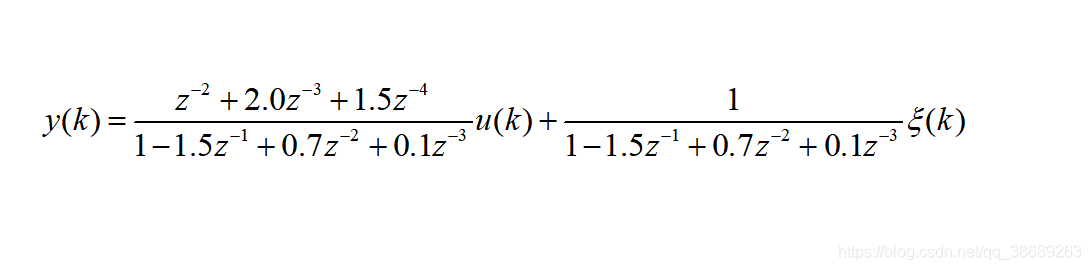
式中x(k)為方差為0.1的白噪聲,要求:
-
當輸入信號u(k)是方差為1的白噪聲序列時,利用系統的輸入輸出資料在線辨識上述模型的引數;
-
當輸入信號u(k)是幅值為1的逆M序列時,利用系統的輸入輸出資料在線辨識上述模型的引數;
-
當輸入信號u(k)是單位階躍信號時,利用系統的輸入輸出資料在線辨識上述模型的引數;
分析比較在不同輸入信號作用下,對系統模型引數辨識精度的影響,
解:![\tiny y(k)=-[-1.5y(k-1)+0.7y(k-2)+0.1y(k-3)]+u(k-2)+2u(k-3)+1.5u(k-4)+\xi (k)](https://private.codecogs.com/gif.latex?%5Cdpi%7B300%7D%20%5Ctiny%20y%28k%29%3D-%5B-1.5y%28k-1%29+0.7y%28k-2%29+0.1y%28k-3%29%5D+u%28k-2%29+2u%28k-3%29+1.5u%28k-4%29+%5Cxi%20%28k%29)
代碼待完善,還沒修改完
【參考代碼】
①方差為1的白噪聲序列
%遞推最小二乘引數估計(RLS)
clear all; close all;
a=[1 -1.5 0.7 0.1]';
b=[1 2 1.5]'; d=2; %物件引數
na=length(a)-1; nb=length(b)-1; %na=3、nb=2為A、B階次
L=400; %仿真長度
uk=zeros(d+nb,1); %輸入初值:uk(i)表示u(k-i)
yk=zeros(na,1); %輸出初值
u=randn(L,1); %輸入采用白噪聲序列
xi=sqrt(1)*randn(L,1); %白噪聲序列 方差=1
theta=[a(2:na+1);b]; %物件引數真值
thetae_1=zeros(na+nb+1,1); %thetae初值
P=10^6*eye(na+nb+1);
for k=1:L
phi=[-yk;uk(d:d+nb)]; %此處phi為列向量
y(k)=phi'*theta+xi(k); %采集輸出資料
%遞推最小二乘法
K=P*phi/(1+phi'*P*phi);
thetae(:,k)=thetae_1+K*(y(k)-phi'*thetae_1);
P=(eye(na+nb+1)-K*phi')*P;
%更新資料
thetae_1=thetae(:,k);
for i=d+nb:-1:2
uk(i)=uk(i-1);
end
uk(1)=u(k);
for i=na:-1:2
yk(i)=yk(i-1);
end
yk(1)=y(k);
end
plot([1:L],thetae); %line([1,L],[theta,theta]);
xlabel('k'); ylabel('引數估計a、b');
legend('a_1','a_2','a_3','b_0','b_1','b_2'); axis([0 L -2 1.5]);
②幅值為1的逆M序列
%遞推最小二乘引數估計(RLS)
clear all; close all;
a=[1 -1.5 0.7 0.1]';
b=[1 2 1.5]'; d=2; %物件引數
na=length(a)-1; nb=length(b)-1; %na=3、nb=2為A、B階次
L=400; %仿真長度
uk=zeros(d+nb,1); %輸入初值:uk(i)表示u(k-i)
yk=zeros(na,1); %輸出初值
%u=randn(L,1); %輸入采用白噪聲序列
xi=sqrt(1)*randn(L,1); %白噪聲序列 方差=1
theta=[a(2:na+1);b]; %物件引數真值
thetae_1=zeros(na+nb+1,1); %thetae初值
P=10^6*eye(na+nb+1);
%M序列及逆M序列的產生
%M序列長度 L=400; %仿真長度
x1=1; x2=1; x3=1; x4=0; %移位暫存器初值xi-1、xi-2、xi-3、xi-4
S=1; %方波初值
for k=1:L
M(k)=xor(x3,x4); %進行異或運算,產生M序列
IM=xor(M(k),S); %進行異或運算,產生逆M序列
if IM==0
u(k)=-1;
else
u(k)=1;
end
S=not(S); %產生方波
x4=x3; x3=x2; x2=x1; x1=M(k); %暫存器移位
phi=[-yk;uk(d:d+nb)]; %此處phi為列向量
y(k)=phi'*theta+xi(k); %采集輸出資料
%遞推最小二乘法
K=P*phi/(1+phi'*P*phi);
thetae(:,k)=thetae_1+K*(y(k)-phi'*thetae_1);
P=(eye(na+nb+1)-K*phi')*P;
%更新資料
thetae_1=thetae(:,k);
for i=d+nb:-1:2
uk(i)=uk(i-1);
end
uk(1)=u(k);
for i=na:-1:2
yk(i)=yk(i-1);
end
yk(1)=y(k);
end
plot([1:L],thetae); %line([1,L],[theta,theta]);
xlabel('k'); ylabel('引數估計a、b');
legend('a_1','a_2','a_3','b_0','b_1','b_2'); axis([0 L -2 4]);
③單位階躍信號
%遞推最小二乘引數估計(RLS)
clear all; close all;
a=[1 -1.5 0.7 0.1]';
b=[1 2 1.5]'; d=2; %物件引數
na=length(a)-1; nb=length(b)-1; %na=3、nb=2為A、B階次
L=400; %仿真長度
uk=zeros(d+nb,1); %輸入初值:uk(i)表示u(k-i)
yk=zeros(na,1); %輸出初值
u=ones(L,1);%輸入采用單位階躍信號
xi=sqrt(1)*randn(L,1); %白噪聲序列 方差=1
theta=[a(2:na+1);b]; %物件引數真值
thetae_1=zeros(na+nb+1,1); %thetae初值
P=10^6*eye(na+nb+1);
for k=1:L
phi=[-yk;uk(d:d+nb)]; %此處phi為列向量
y(k)=phi'*theta+xi(k); %采集輸出資料
%遞推最小二乘法
K=P*phi/(1+phi'*P*phi);
thetae(:,k)=thetae_1+K*(y(k)-phi'*thetae_1);
P=(eye(na+nb+1)-K*phi')*P;
%更新資料
thetae_1=thetae(:,k);
for i=d+nb:-1:2
uk(i)=uk(i-1);
end
uk(1)=u(k);
for i=na:-1:2
yk(i)=yk(i-1);
end
yk(1)=y(k);
end
plot([1:L],thetae); %line([1,L],[theta,theta]);
xlabel('k'); ylabel('引數估計a、b');
legend('a_1','a_2','a_3','b_0','b_1','b_2'); axis([0 L -2 1.5]);
作業二 最小方差自校正控制實驗
設二階純滯后被控物件的數學模型引數未知或慢時變,仿真實驗時用下列模型:
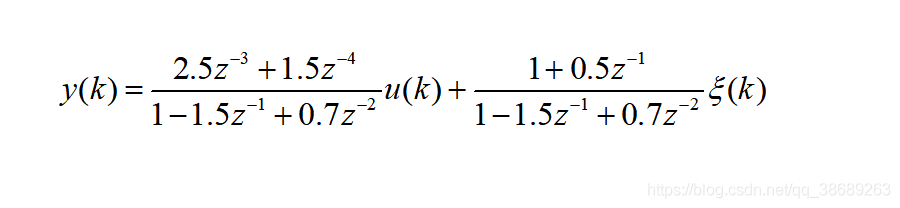
式中x(k)為方差為0.1的白噪聲,要求:
-
當設定輸入yr(k)為幅值是10的階躍信號時,設計最小方差直接自校正控制演算法對上述物件進行倍訓控制;
-
當設定輸入yr(k)為幅值是10的方波信號時,設計最小方差直接自校正控制演算法對上述物件進行倍訓控制;
-
如果被控物件模型改為:
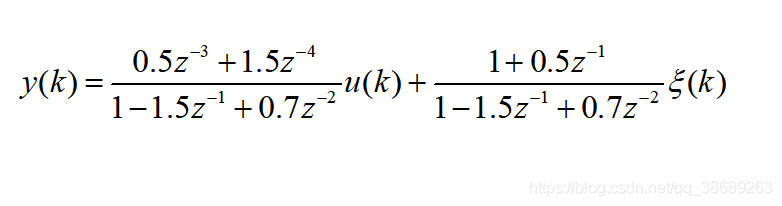
重復上述(1)、(2)實驗,控制結果如何?分析原因,
【參考代碼】
%最小二乘引數估計
clear all;
作業三 模型參考自適應控制實驗
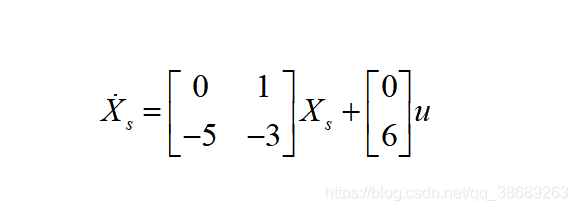
設被控物件模型引數未知或慢時變,但其狀態變數完全可觀測,
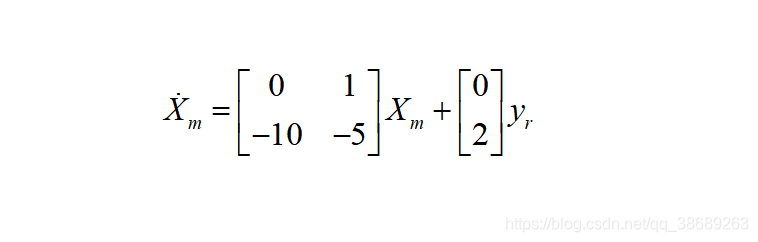
仿真時取狀態方程為:
選擇參考模型:
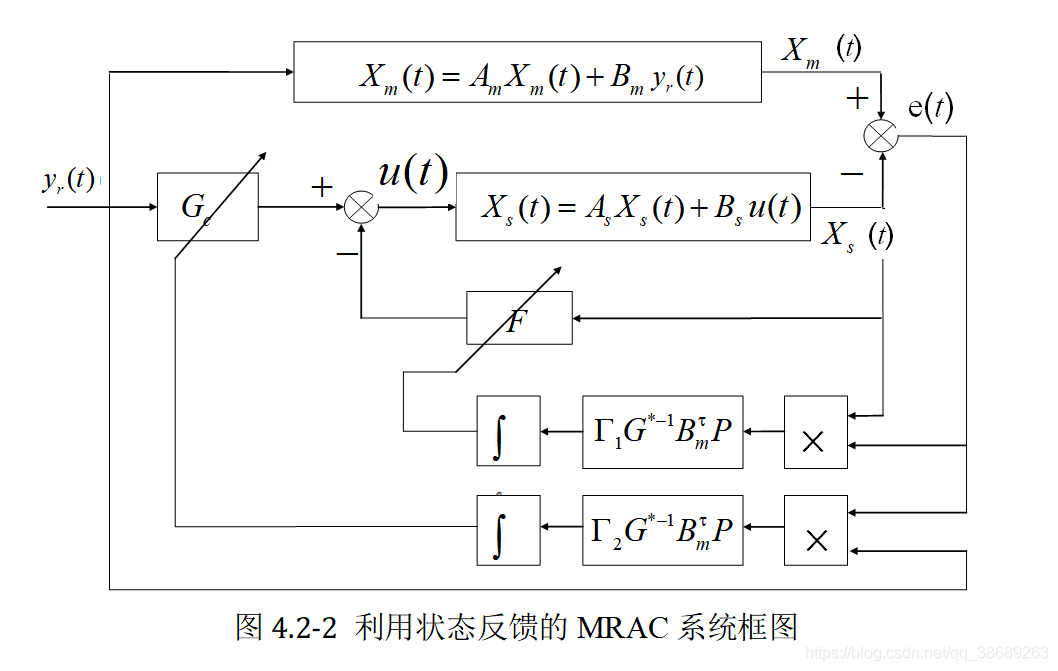
狀態完全可觀測的模型參考自適應控制系統如下圖所示:
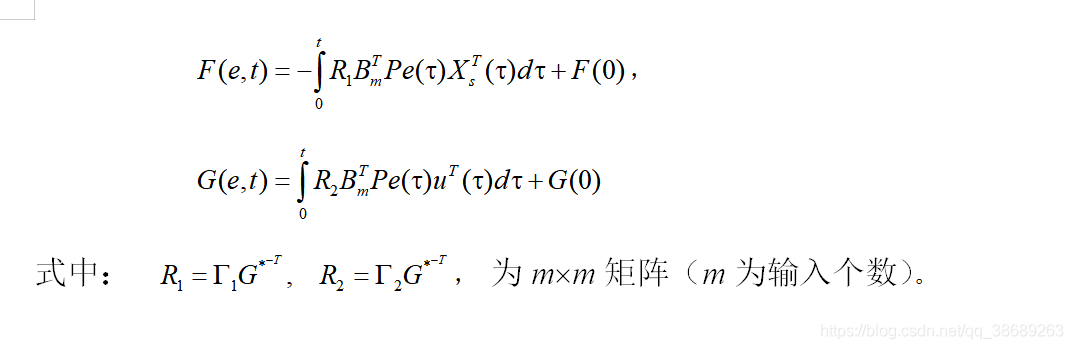
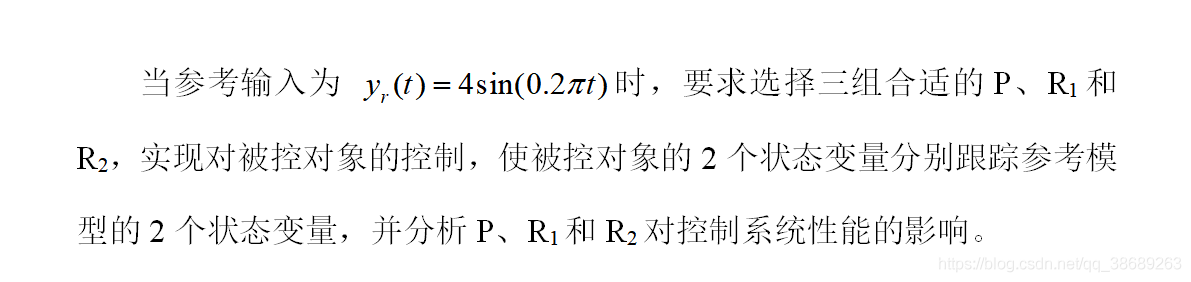
控制器自適應規律為:
【參考代碼】
%最小二乘引數估計
clear all;
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/218824.html
標籤:其他
下一篇:Verilog初學 16位計數器