基于棋盤格標定板的單相機單投影儀結構光系統的標定——投影儀標定和系統標定
做投影儀標定的前提是了解上一篇關于相機標定的博客:
結構光系統之相機標定
一、理論分析:
標定投影儀,是將投影儀當作逆相機進行標定從而利用張正友相機標定的理論進行標定,最后獲得投影儀的內參和外參,
根據張正友相機標定的原理我們需要已知所投射棋盤格的角點的2D像素坐標和世界坐標系下的3D坐標,
- 1、根據標定相機得到的外參,獲得相機坐標系下的標定平面方程;
- 2、投影棋盤格到標定板上,檢測角點,獲得世界坐標系下的光線;
通過求線面交點獲得投影棋盤格的空間3D坐標(世界坐標系下);
- 3、用棋盤格的2D點和對應的3D點標定投影儀,直接用張正友的相機標定方法,
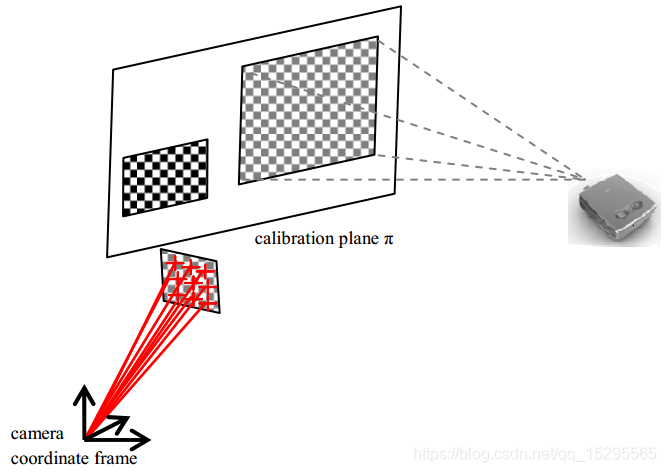
下圖為系統圖:
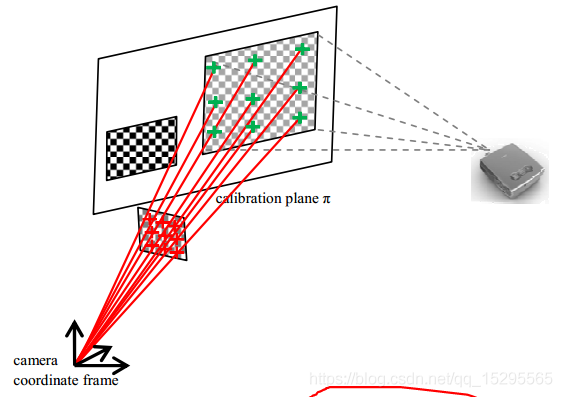
作圖為了說明標定原理,將平面內標定板上的棋盤格和投影儀的投射圖案分開了,第二張圖為實際拍攝影像,
投射棋盤格角點的三維坐標怎么求取呢?
1、根據標定相機得到的外參,獲得相機坐標系下的標定平面方程
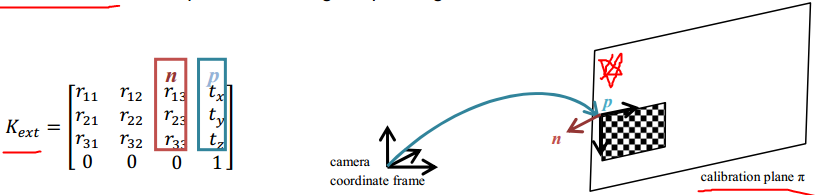
上圖中的Kext為相機的外參,在相機標定中我們已經證明了n為標定平面的法向量,p為平移向量,如圖右所示,
假設平面上一點為r,則有關系
設,
,
為笛卡爾坐標系單位向量,
,
nr-np=0,ax+by+cz=np,即為世界坐標系下的標定平面方程,
2、投影棋盤格到標定板上,檢測角點,獲得相機坐標系下的光線
通過求線面交點獲得投影棋盤格的空間3D坐標(世界坐標系下);
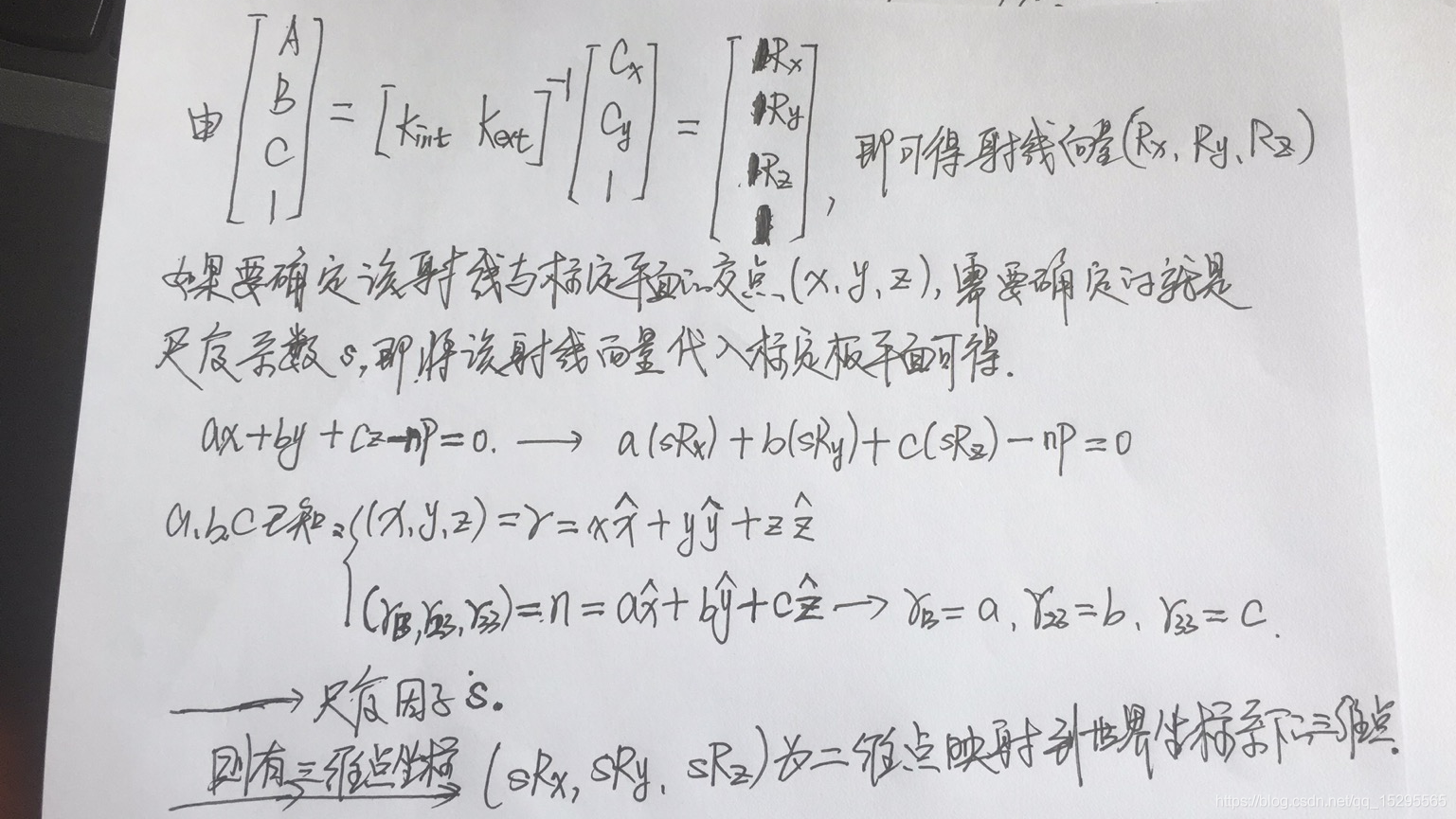
下面建立從相機光軸通過投射圖案角點的3D射線方程:
從相機光心到標定板的射線,如上圖中紅色線所使,可以用向量(Rx,Ry,Rz)表示,
在已知相機的內外引數和三維點坐標時,求解相機拍攝到的所對應的二維像素坐標時是有唯一值的,但是由內外參和二維點坐標求解三維點坐標時則是不唯一的,所求得的是相機光心投射出去的射線上的三維點可以是射線上的任意一個三維點,且所有的三維點坐標數值上相差一個比例系數,圖示如下:
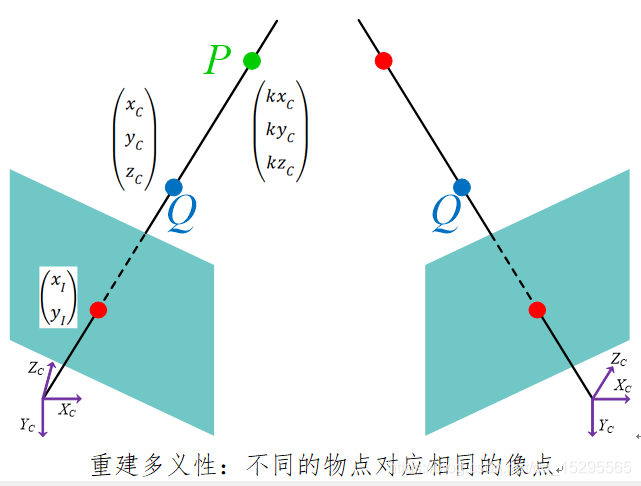
因此,在由2D像點(逆向映射)恢復3D物點的程序中,由于2D像點的深度資訊的丟失,造成了重建程序中的不確定性,因此需要引入新的約束條件才能完成重建,這是從重建映射求解的角度進行解釋,
為了獲得通過平面內角點像素坐標(Cx,Cy)的3D射線,我們用以下的放射變換求得:
3、用棋盤格的2D點和對應的3D點標定投影儀,用張正友的相機標定方法
4、當相機和投影儀被標定完成后,就可以直接呼叫opencv 的立體視覺標定函式標定系統
二、實作程序:
1、操作步驟
該種方法將投影儀當作逆向的相機模型來進行標定,具體標定步驟如下:
1:按照合適的角度固定好相機和投影儀,角度在30度左右,標定程序中保證二者相對靜止;
2:將列印好的標定板(棋盤格/圓形陣列)貼到較為平整的白板上;
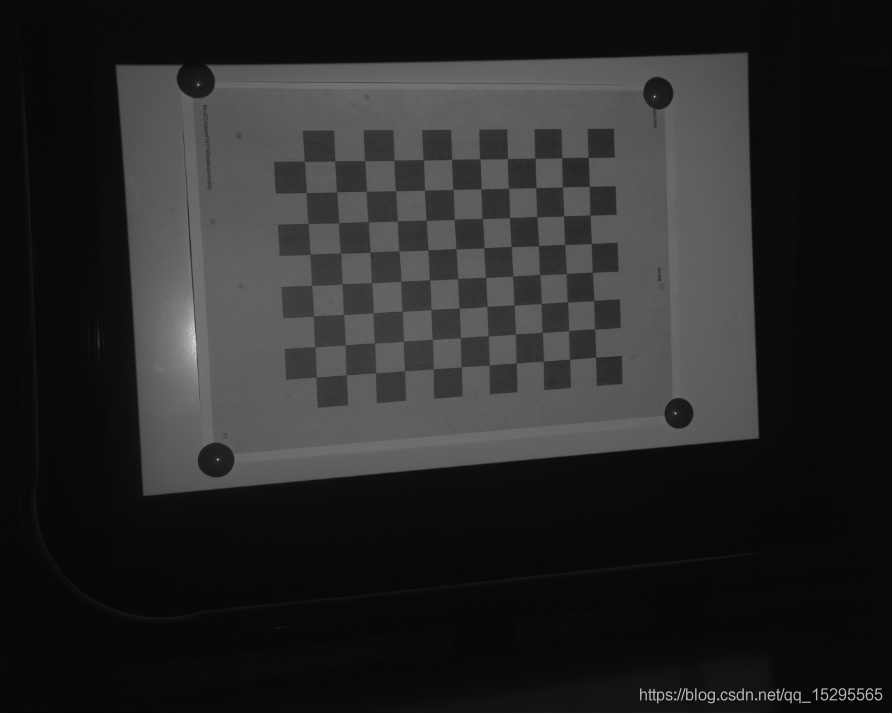
3:投影儀關閉,相機拍攝列印的標定板圖片;
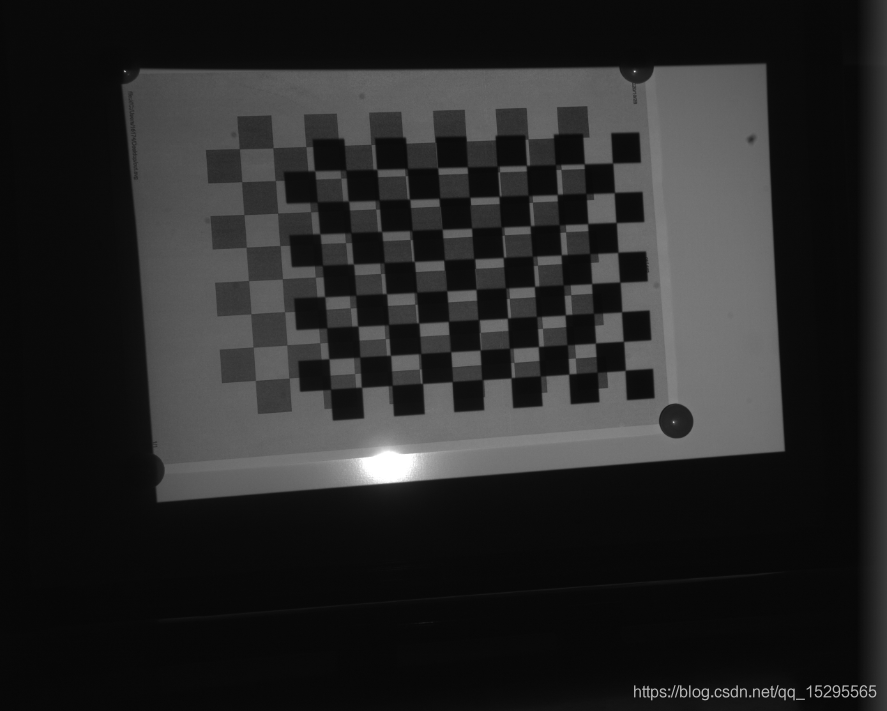
4:投影儀打開,將標定圖案投射到白板上,相機拍攝投射的標定板圖片;
5:改變系統相對白板的位姿,重復步驟S3、S4,拍攝>15組的資料;
6:使用拍攝的列印標定板圖片進行相機標定,獲得相機內外參并保存每個標定板上圖案位置資訊;
7:投影儀標定;
8:已知每次場景下的相機外參和投影儀外參,計算出相機和投影儀之間的相對位姿,
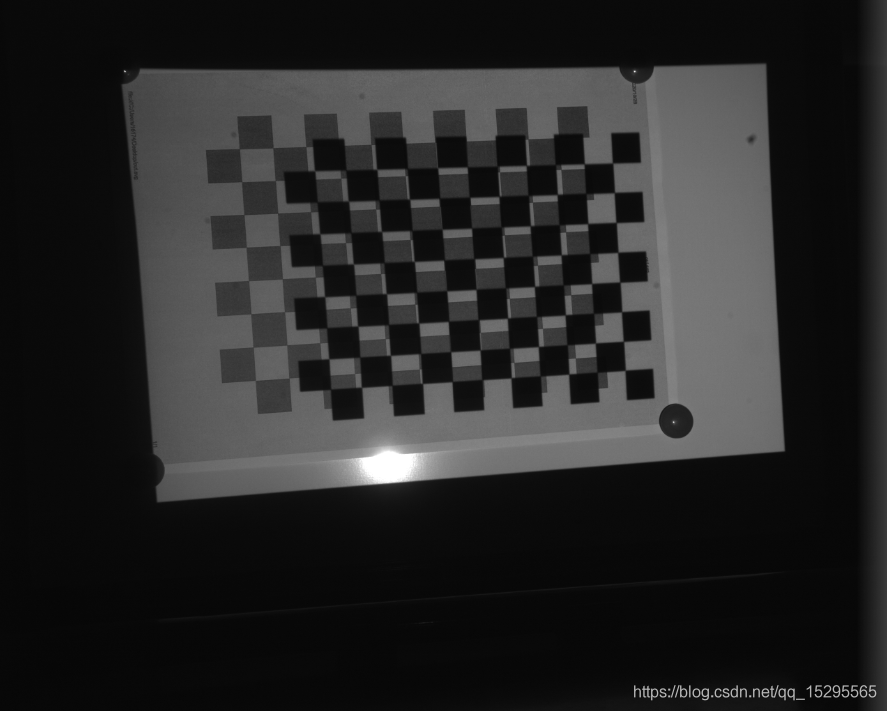
2、拍攝的標定所拍攝圖片
步驟3拍攝的圖片:
步驟4,5拍攝圖片:
 CSDN認證博客專家
結構光編解碼
視覺系統影像處理
CSDN認證博客專家
結構光編解碼
視覺系統影像處理
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/222564.html
標籤:AI
上一篇:技術學習不能眼高手低