本文僅用于學習程序中的一些總結記錄,2020年發表的關于事件相機在一些領域的總結,
1. 運動估計 Motion Estimation
有不少關于運動估計的論文,基本是圍繞之前最大化事件積累圖對比度的方式進行,
最小化Entropy
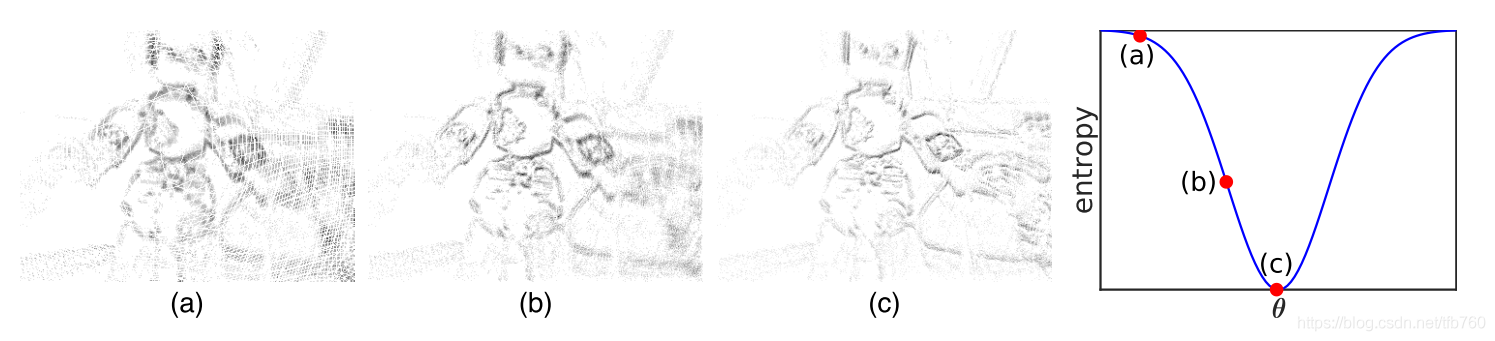
[1] 采用最小化熵函式的方式,對運動引數進行估計,文章指出最大的優點是,這種方法不需要將空間中的事件投影到平面上去最大化對比度,然而數學內容太復雜真的看不懂,
全域最優解計算
[2] [3] 兩篇論文,都是解決運動引數估計時陷入區域最優解的問題,如果在使用最大對比度函式進行計算運動引數時,需要有一個較好的引數初值,否則對于影像問題在優化時會陷入區域最優解,如下圖所示,左下角的運動引數就是區域最優解,
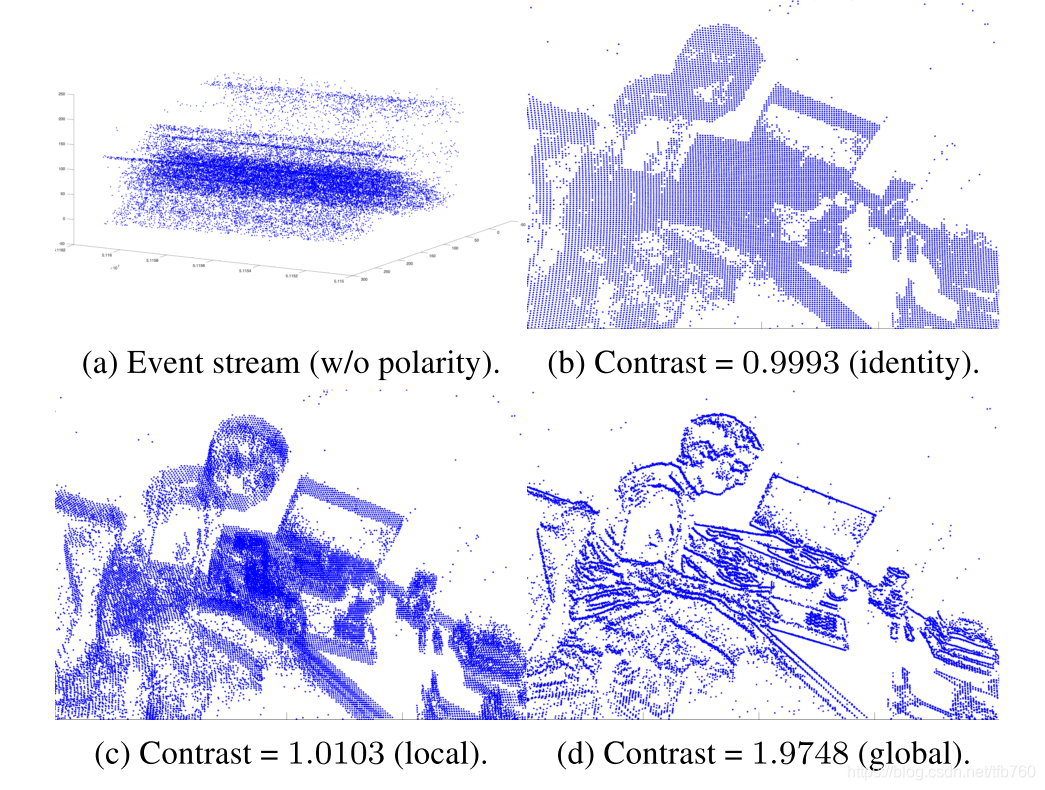 論文采用了分支定界(Branch-and-bound)的方法進行全域搜索,提出了某個區域的近似上界和下界,加速運算,
論文采用了分支定界(Branch-and-bound)的方法進行全域搜索,提出了某個區域的近似上界和下界,加速運算,
運動引數時間連續性
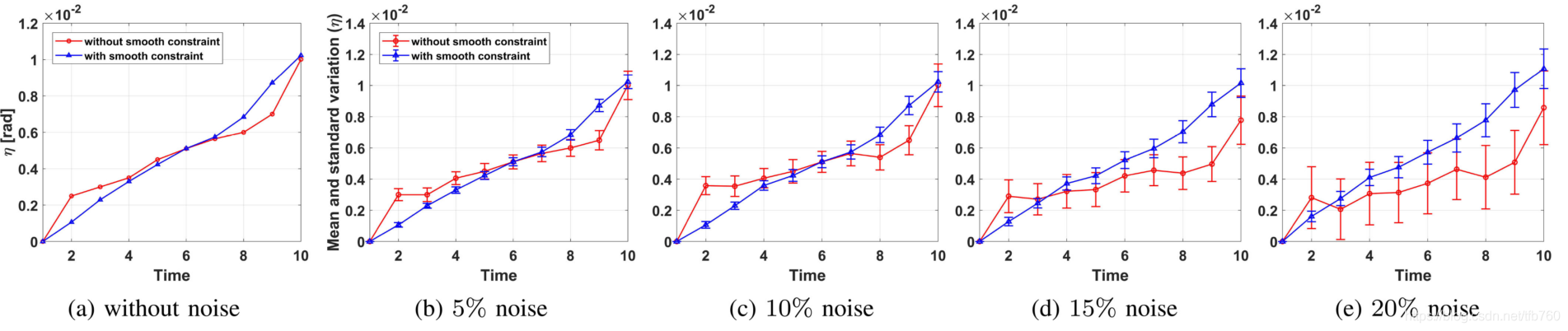
[4] 這篇論文提出,相機的運動應該是連續的,之前的方法只是針對每個積累圖進行一次優化得到運動引數,并沒有考慮與前后時刻的運動引數是否一致,
論文將一段兒時間內的運動引數設定為時變的,但這樣難以優化,所以不得不再次切片成多個更短的時間離散化,分別優化運動引數,同時增加一階導數作為懲罰項避免過擬合,保證引數變化的連續性,如下圖,待優化的運動引數是時變的 θ t \theta_t θt?,最后一項是引數的一階導,

這個想法讓人眼前一亮,從實驗結果上看,增加噪聲以后,考慮了時間上的連續性情況下的運動曲線更加平滑,
2. 建圖、場景識別與VIO
Frame+event的深度估計
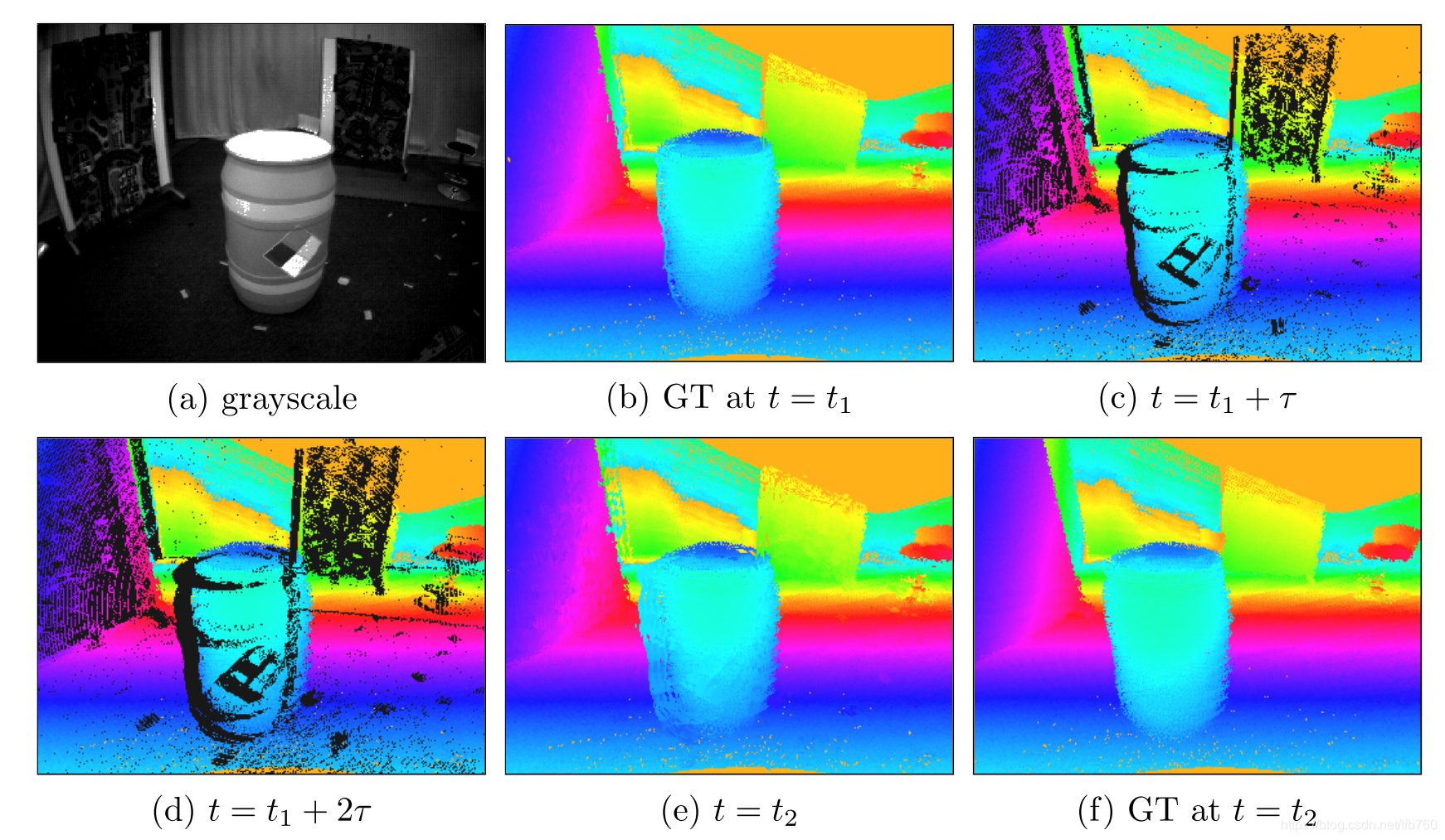
[5] 使用了事件相機+傳統相機進行深度估計,作者指出這是第一個關于二者融合的深度估計,二者結合得到了時間上連續的稠密深度圖,
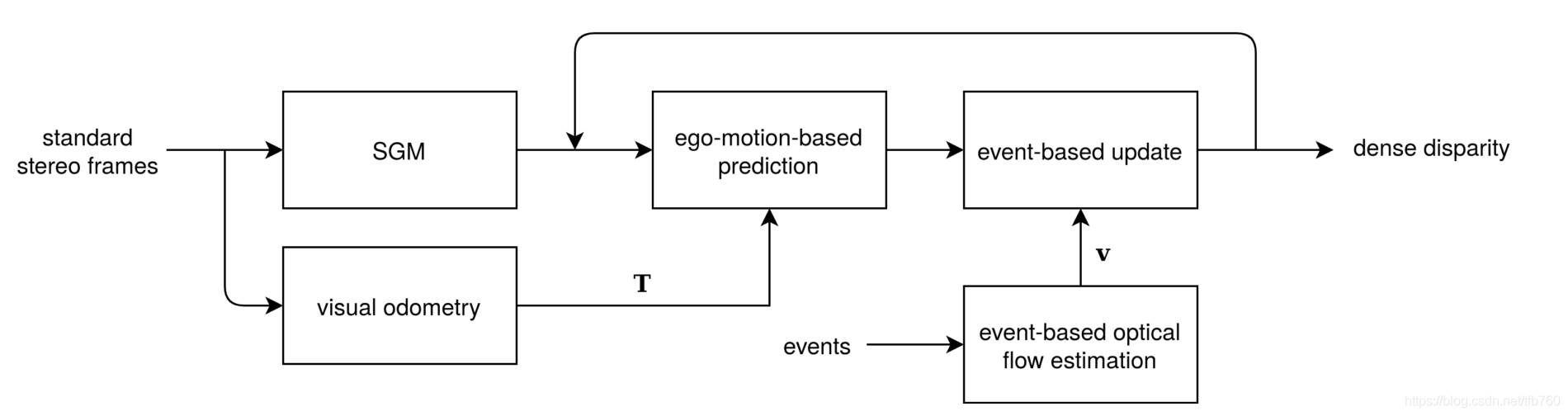 方法架構如上圖,stereo相機資料過來以后進行稠密重建,然后根據運動引數推測和收到的events在兩幀影像之間對depth圖進行更新,由于利用到了視差的資訊,論文提到這種方法更適合于平行于平面運動,但仍然不失為一種不錯的嘗試,畢竟這種方法補全了兩幀之間的深度圖,還是挺有趣的,
方法架構如上圖,stereo相機資料過來以后進行稠密重建,然后根據運動引數推測和收到的events在兩幀影像之間對depth圖進行更新,由于利用到了視差的資訊,論文提到這種方法更適合于平行于平面運動,但仍然不失為一種不錯的嘗試,畢竟這種方法補全了兩幀之間的深度圖,還是挺有趣的,
基于事件的場景識別
[6] 是我讀到的第一個event-based的場景識別的論文,時空視窗的選擇方式常見的有定事件數量或定時間,但無論如何事件只歸屬于一個視窗,而這篇論文采用了多種尺度的時間視窗,一個事件同時隸屬于多個視窗,然后通過已有的E2VID方法恢復到影像,再進行匹配,
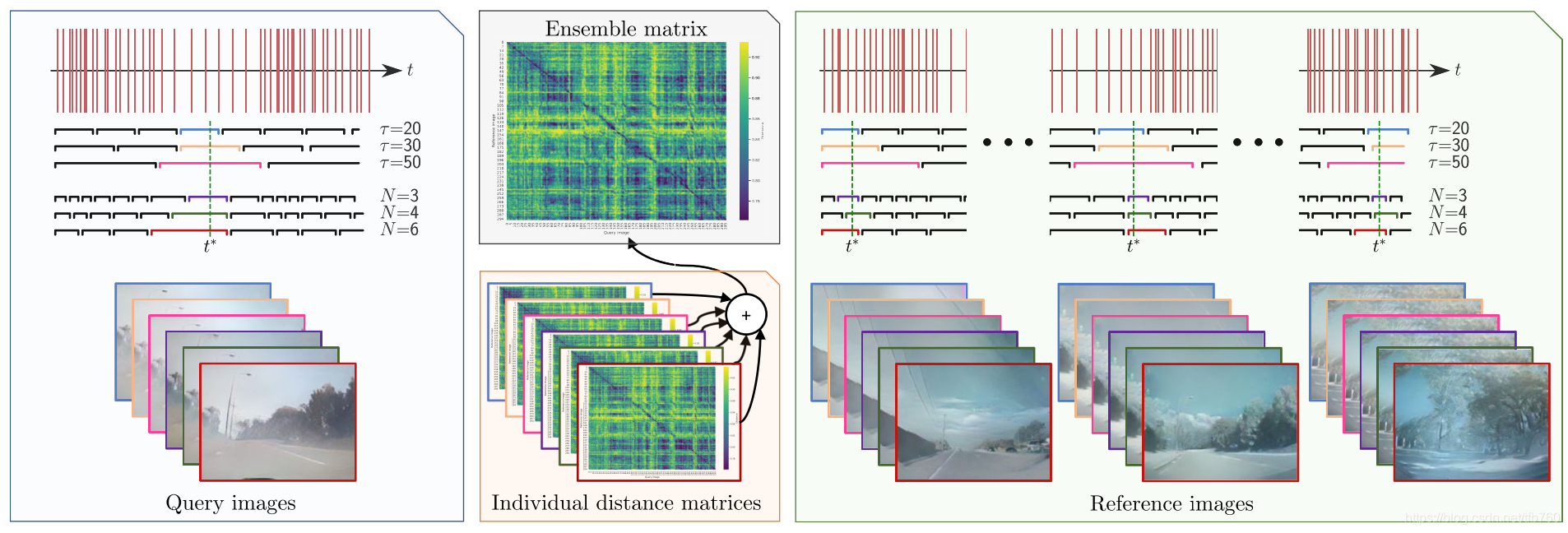 如上圖的流程所示,第一個圖示意某一個時刻某一個事件可能同時歸屬于6個視窗(3種時間間隔、3種數量上限),之后所有的窗格恢復images,再分別提取特征,與之前關鍵位置的images進行比對,形成Ensemble matrix,最近的那個就是成功匹配,這種方法給出了一些近似方法,降低了比對的復雜度,這個方法還是比較有趣的,雖然感覺有點兒暴力,
如上圖的流程所示,第一個圖示意某一個時刻某一個事件可能同時歸屬于6個視窗(3種時間間隔、3種數量上限),之后所有的窗格恢復images,再分別提取特征,與之前關鍵位置的images進行比對,形成Ensemble matrix,最近的那個就是成功匹配,這種方法給出了一些近似方法,降低了比對的復雜度,這個方法還是比較有趣的,雖然感覺有點兒暴力,
利用線特征的VIO
[7] 這篇論文提出了一個IMU+DVS的VIO,大致看了一下主要是優化的點到線距離,
3. 基于Learning的一些研究
基于SNN的角速度估計
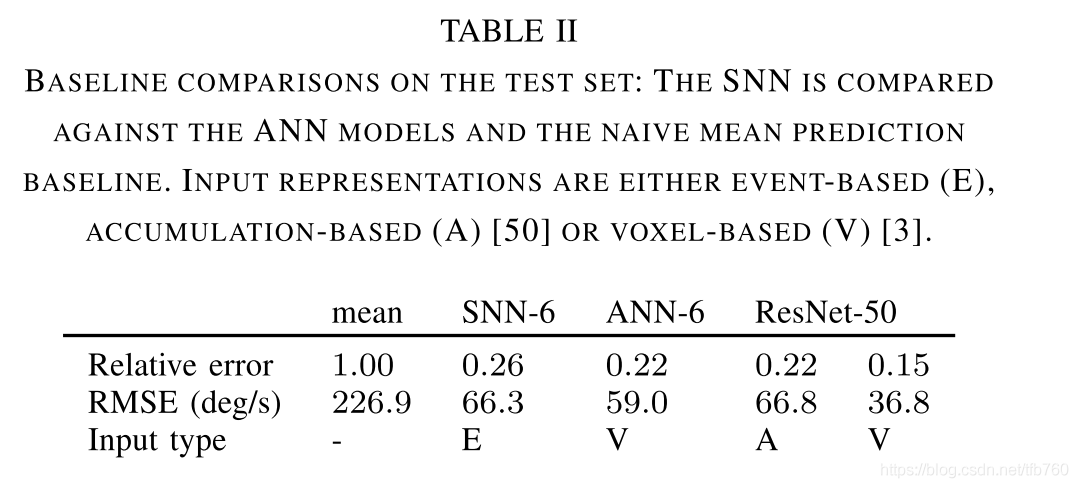
[8] 這篇論文采用SNN對3DoF的角速度進行估計,在此之前,SNN基本只用與做Event的分類問題,而沒有做過回歸(角速度估計是回歸問題),這篇論文表示做回歸問題也是可行的,同時比其他ANN的方法要好,
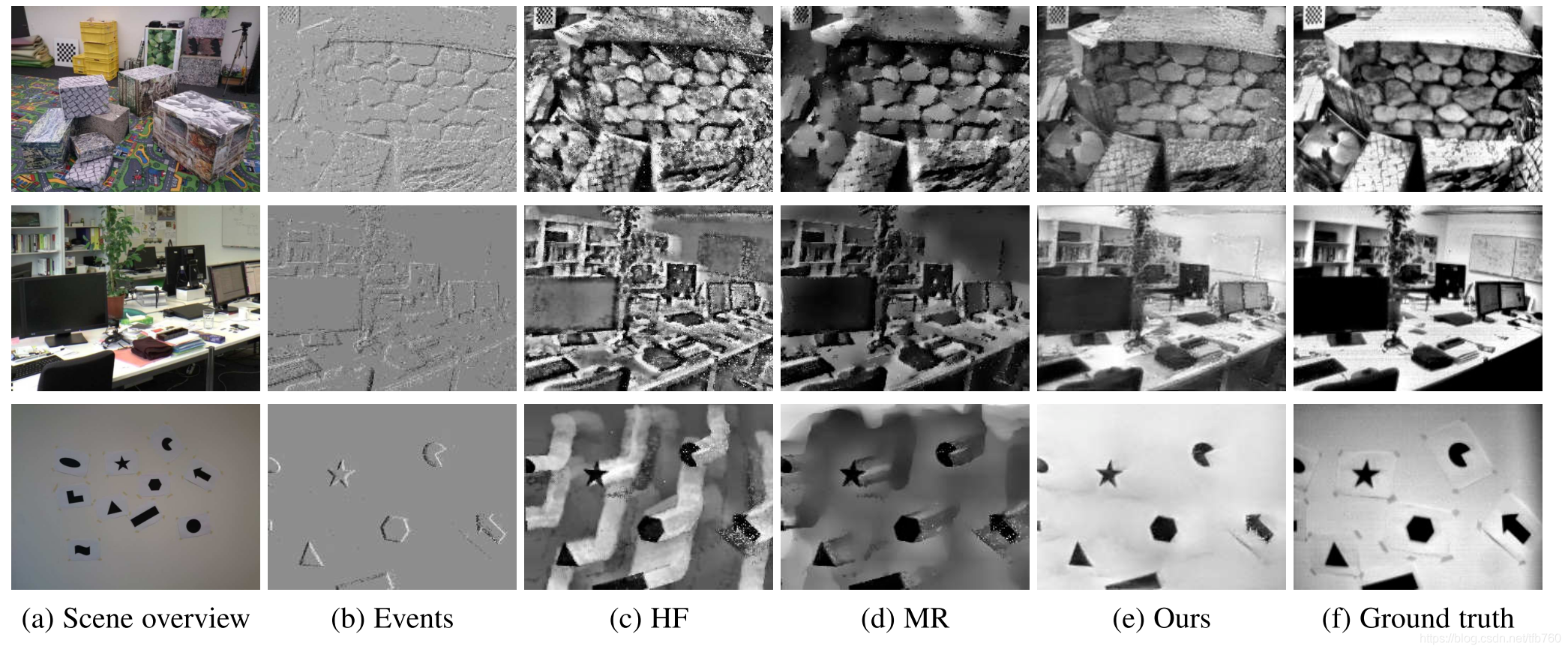
E2VID 視頻恢復
[9] 這篇論文是rpg組Henri Rebecq的作業,好像是在18年基礎上的改進,并公開了代碼,event資料流直接通過learning后轉成視頻,看著效果還是不錯的,應該比之前基于泊松的一些重建要方便許多,
4. 信號處理領域相關研究
降噪
2020降噪的研究有不少在我之前的一篇博客中有所總結:【事件相機整理】信號處理、噪聲與濾波,這里就不展開介紹,
資料編碼與壓縮
之前沒有注意,最近發現在github的event camera的匯總中出現了“Compression”相關的研究,以為是2020年才開始的,結果打開論文發現,[10][11]中已經指出了不少的研究,想簡單看一看發現實在是太深入了,之前研究傳統影像編碼與壓縮的方法,大量的用在event上面,真的是新的應用場景又養活了一批人,
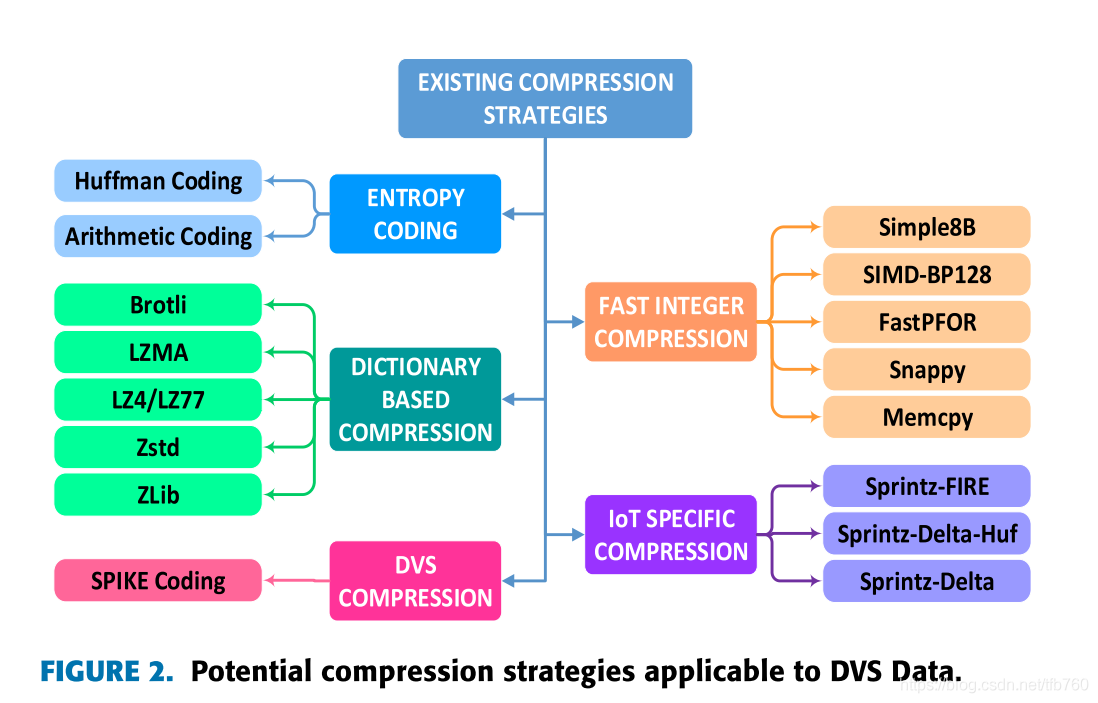
壓縮與編碼目的:降低資料量,總線傳輸更快,降低存盤空間,IoT領域降低傳輸資料量
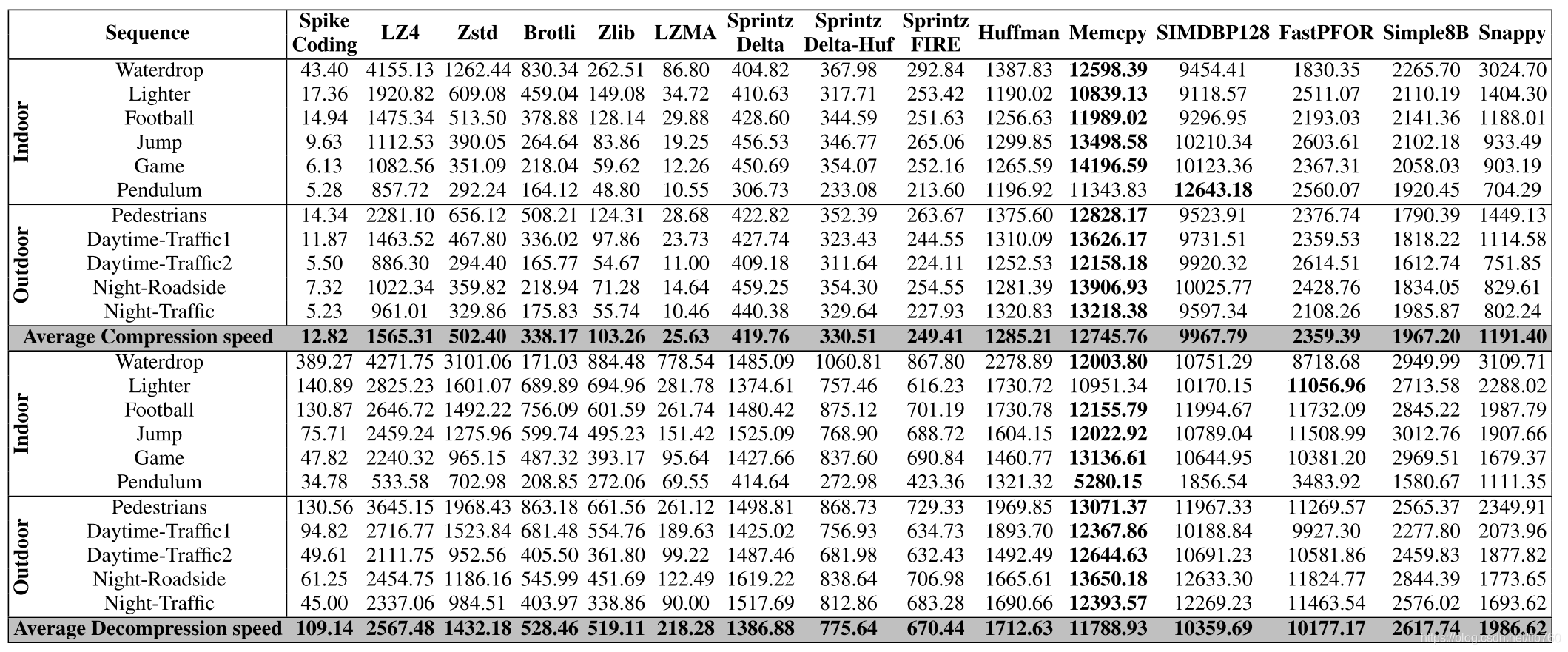
資料編碼與壓縮的主要衡量指標:壓縮率、編解碼速度、編解碼延時
方法比較的結果:壓縮率:LZMA(靜態),Spike(動態); 編解碼速度:LZ4和Snappy;綜合性能:Brotli演算法
未完待續
有時間繼續補充,未完待續……
參考文獻
[1]. Urbano Miguel Nunes: Entropy Minimisation Framework for Event-based Vision Model Estimation.
[2]. Xin Peng: Globally-Optimal Event Camera Motion Estimation.
[3]. Liu, Daqi; Parra, álvaro; Chin, Tat-Jun (2020): Globally Optimal Contrast Maximisation for Event-based Motion Estimation. Available online at http://arxiv.org/pdf/2002.10686v3.
[4]. Xu, Jie; Jiang, Meng; Yu, Lei; Yang, Wen; Wang, Wenwei (2020): Robust Motion Compensation for Event Cameras With Smooth Constraint. In IEEE Trans. Comput. Imaging 6, pp. 604–614. DOI: 10.1109/TCI.2020.2964255.
[5]. Antea Hadviger: Stereo Dense Depth Tracking Based on Optical Flow using Frames and Events.
[6]. Fischer, Tobias; Milford, Michael (2020): Event-Based Visual Place Recognition With Ensembles of Temporal Windows. In IEEE Robot. Autom. Lett. 5 (4), pp. 6924–6931. DOI: 10.1109/LRA.2020.3025505.
[7]. Le Gentil, Cedric; Tschopp, Florian; Alzugaray, Ignacio; Vidal-Calleja, Teresa; Siegwart, Roland; Nieto, Juan (2020): IDOL: A Framework for IMU-DVS Odometry using Lines. Available online at http://arxiv.org/pdf/2008.05749v1.
[8]. Gehrig, Mathias; Shrestha, Sumit Bam; Mouritzen, Daniel; Scaramuzza, Davide: Event-Based Angular Velocity Regression with Spiking Networks. In IEEE International Conference on Robotics and Automation (ICRA). Available online at http://arxiv.org/pdf/2003.02790v1.
[9]. Rebecq, Henri; Ranftl, Rene; Koltun, Vladlen; Scaramuzza, Davide (2019): High Speed and High Dynamic Range Video with an Event Camera. In IEEE transactions on pattern analysis and machine intelligence PP. DOI: 10.1109/TPAMI.2019.2963386.
[10]. Khan, Nabeel; Iqbal, Khurram; Martini, Maria G. (2020): Lossless Compression of Data From Static and Mobile Dynamic Vision Sensors-Performance and Trade-Offs. In IEEE Access 8, pp. 103149–103163. DOI: 10.1109/ACCESS.2020.2996661.
[11]. Banerjee, Srutarshi; Wang, Zihao W.; Chopp, Henry H.; Cossairt, Oliver; Katsaggelos, Aggelos (2020): Quadtree Driven Lossy Event Compression. Available online at http://arxiv.org/pdf/2005.00974v1.
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/224000.html
標籤:其他