在上一篇博文《動手學無人駕駛(5):多傳感器資料融合》介紹了如何使用Radar和LiDAR資料對自行車進行追蹤,這是對汽車外界運動物體進行定位,
對于自動駕駛的汽車來說,有時也需要對自身進行更精確的定位,今天就介紹如何使用IMU和GPS進行自車定位(因為在上一篇文章中對kalman和Extend Kalman原理進行了比較詳細的介紹,本文中理論部分不會再介紹的這么詳細了,有需要的話可以回看上文),
本文參考了Coursera自動駕駛課程專案,在此表示感謝,
大家可以先看看下面這個視頻,對本專案要介紹的內容有個初步了解,視頻鏈接為:https://www.bilibili.com/video/BV1cE411D7Y9?p=18
Coursera 自動駕駛教程:Part2 - State Estimation and Localization for Self-Driving Cars
文章目錄
- 1.IMU簡介
- 2.GPS簡介
- 3.資料融合
- 3.1 Extend Kalman Filter
- 3.2 Motion Model
- 3.3 Measurement Model
- 3.4 Sensor Fusion
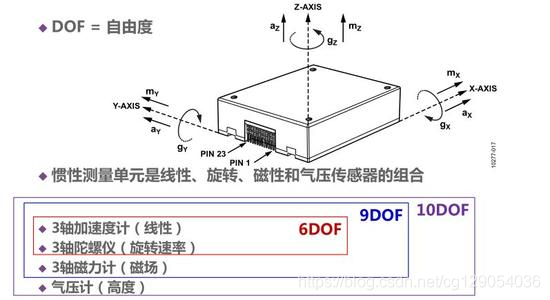
1.IMU簡介
慣性測量單元(Inertial Measurement Unit)通常指由3個加速度計和3個陀螺儀組合而成,加速度計和陀螺儀安裝在互相垂直的測量軸上,這里可以將其輸出看作為三個方向的加速度和角速度,表示為:
i
m
u
=
[
a
x
a
y
a
z
w
x
w
y
w
z
]
imu=\begin{bmatrix}a_x \\ a_y\\ a_z \\ w_x \\ w_y \\ w_z\end{bmatrix}
imu=?????????ax?ay?az?wx?wy?wz???????????
2.GPS簡介
全球定位系統(Global Positioning System)大家應該都不陌生,其輸出常見為:經度,維度,和高度,表示為:
g
p
s
=
[
l
n
g
l
a
t
a
l
t
]
gps=\begin{bmatrix} lng\\lat\\alt \end{bmatrix}
gps=???lnglatalt????

3.資料融合
3.1 Extend Kalman Filter
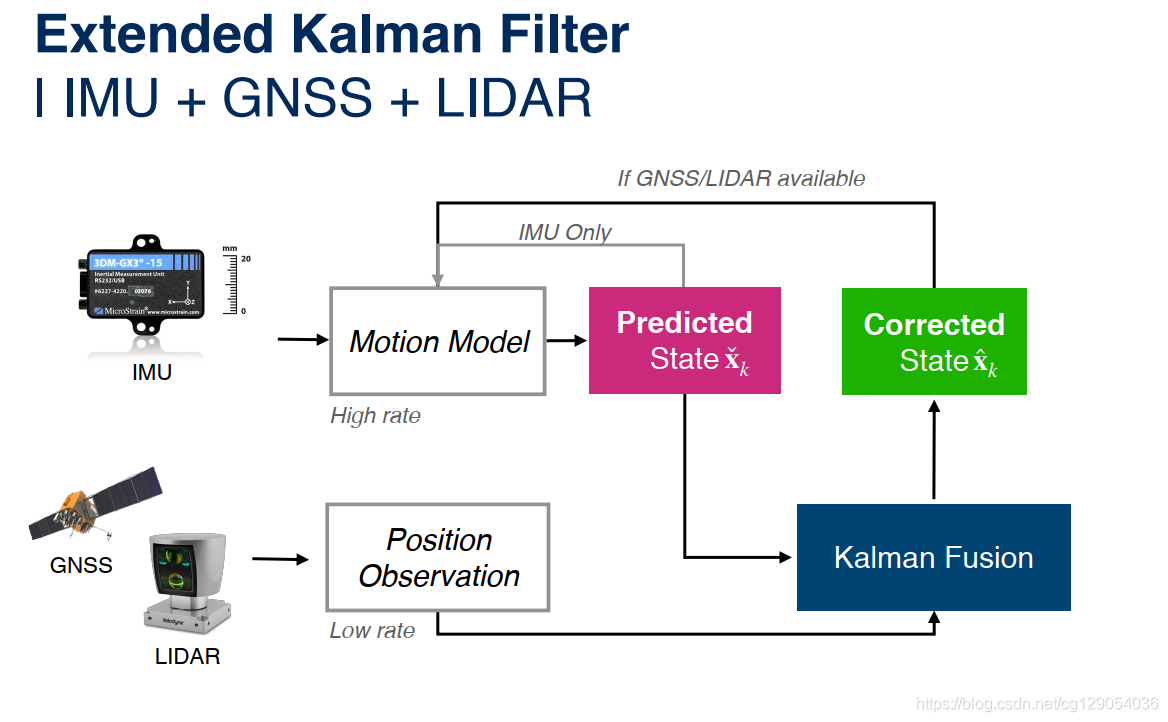
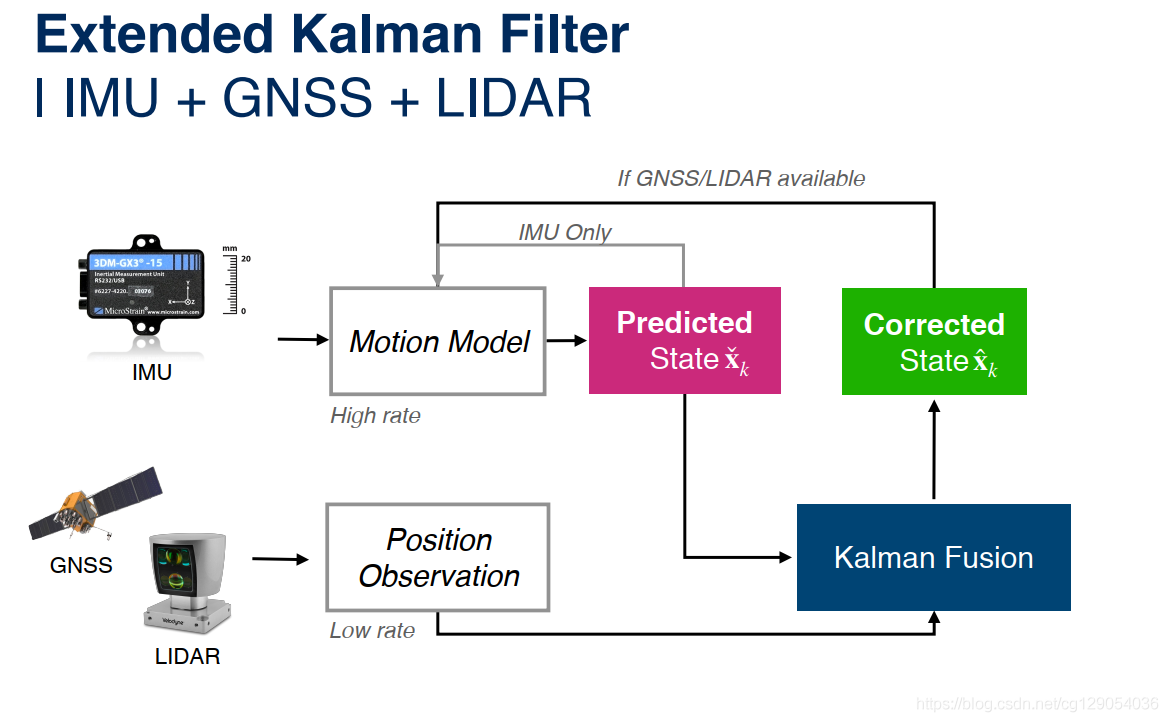
整個流程框架如下圖所示,這里需要注意的是IMU與GPS的輸出信號頻率是不同的,IMU輸出頻率常見為50-500Hz不等,GPS輸出頻率常見為1-10Hz,因此要分為兩部分來討論:
(1)在只有
IMU資料時(此時GPS還未有輸出產生),IMU資料經過運動模型,得到預測狀態 x ˇ k \check {x}_k xˇk?;然后預測狀態傳送回運動模型,繼續下一步預測;
(2)當有GPS資料產生時,上一時刻產生的預測狀態將會和接收到的GPS位置資訊進行資料融合,得到修正后的狀態 x ^ k \hat {x}_k x^k?,然后再傳回運動模型,進行下一周期的運算,
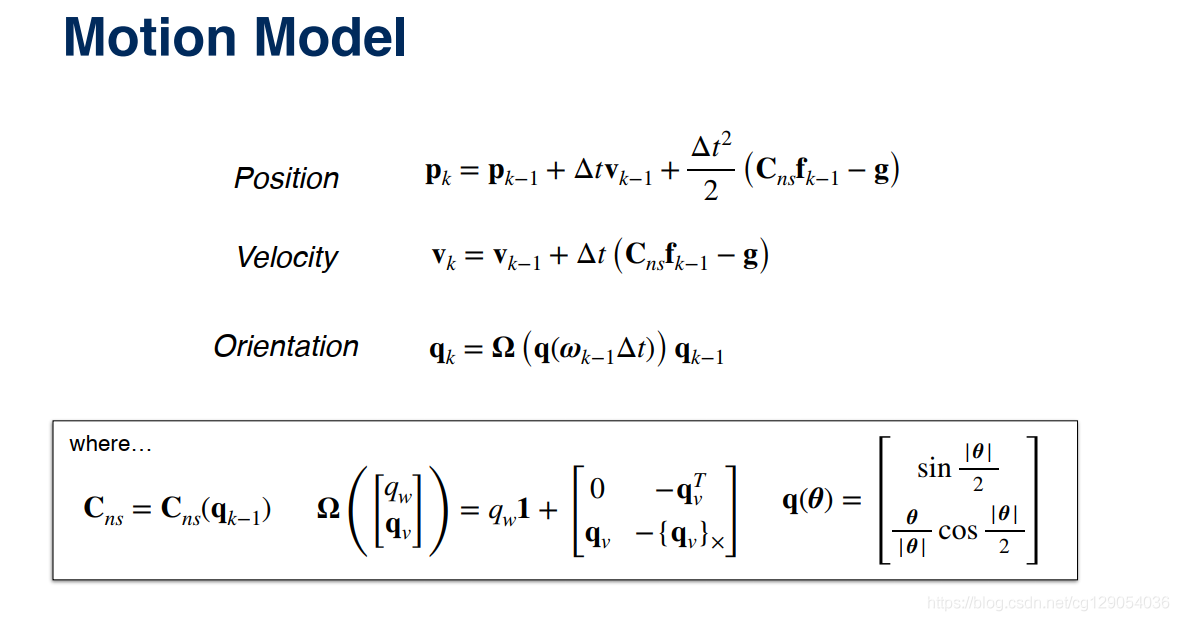
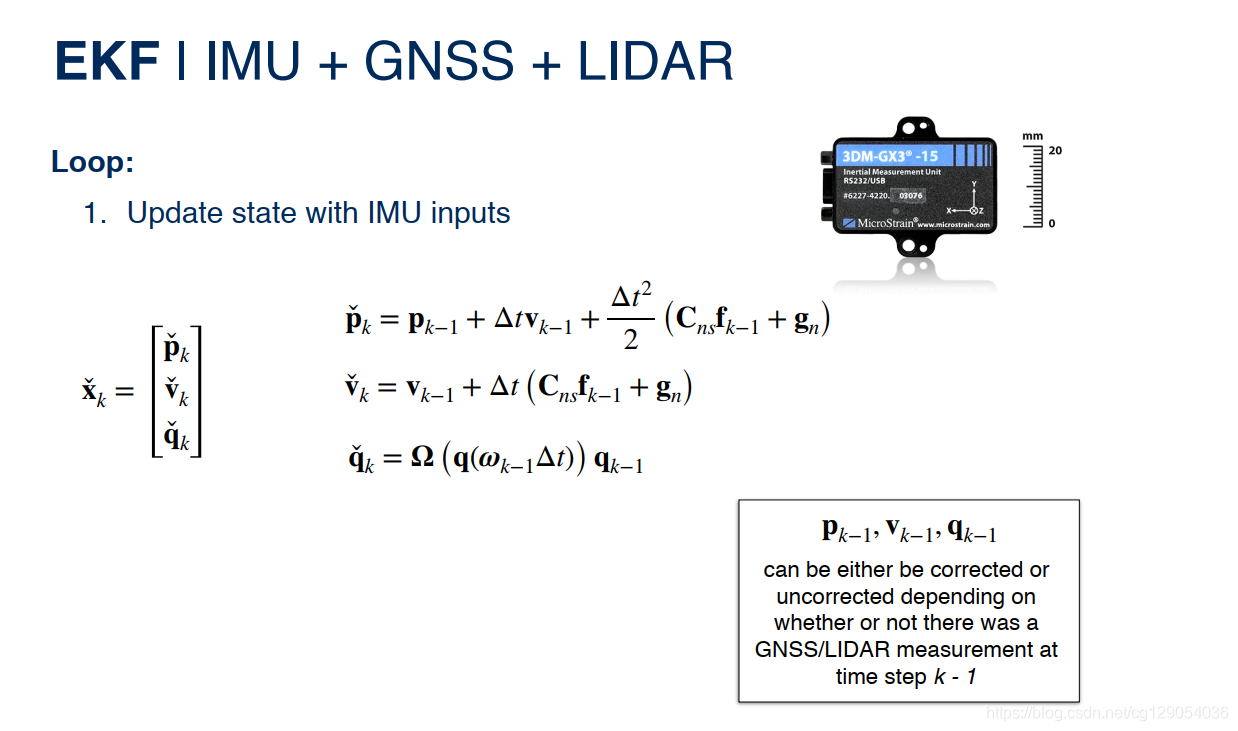
3.2 Motion Model
運動模型如下,狀態向量為10維狀態向量,即 x = [ p x , p y , p z , v x , v y , v z , q 0 , q 1 , q 2 , q 3 ] T x=[p_x,p_y,p_z,v_x,v_y,v_z,q_0,q_1,q_2,q_3]^T x=[px?,py?,pz?,vx?,vy?,vz?,q0?,q1?,q2?,q3?]T,模型可以分為三部分討論:
(1)
位置運動模型,假設載體做勻加速運動,則有: p k = Δ t v k ? 1 + Δ t 2 2 ( C n s f k ? 1 ? g ) p_k=\Delta{t}v_{k-1}+\frac{\Delta{t}^2}{2}(C_{ns}f_{k-1}-g) pk?=Δtvk?1?+2Δt2?(Cns?fk?1??g),其中 f k ? 1 f_{k-1} fk?1?為imu的測量值, C n s C_{ns} Cns?為旋轉矩陣,用于對imu的測量值進行坐標變換,
(2)速度運動模型,同樣假設載體做勻加速運動,
(3)方向運動模型,這里 q k ? 1 q_{k-1} qk?1?表示為四元數,關于四元數的旋轉變換可以參考有關資料,這里不做展開了,
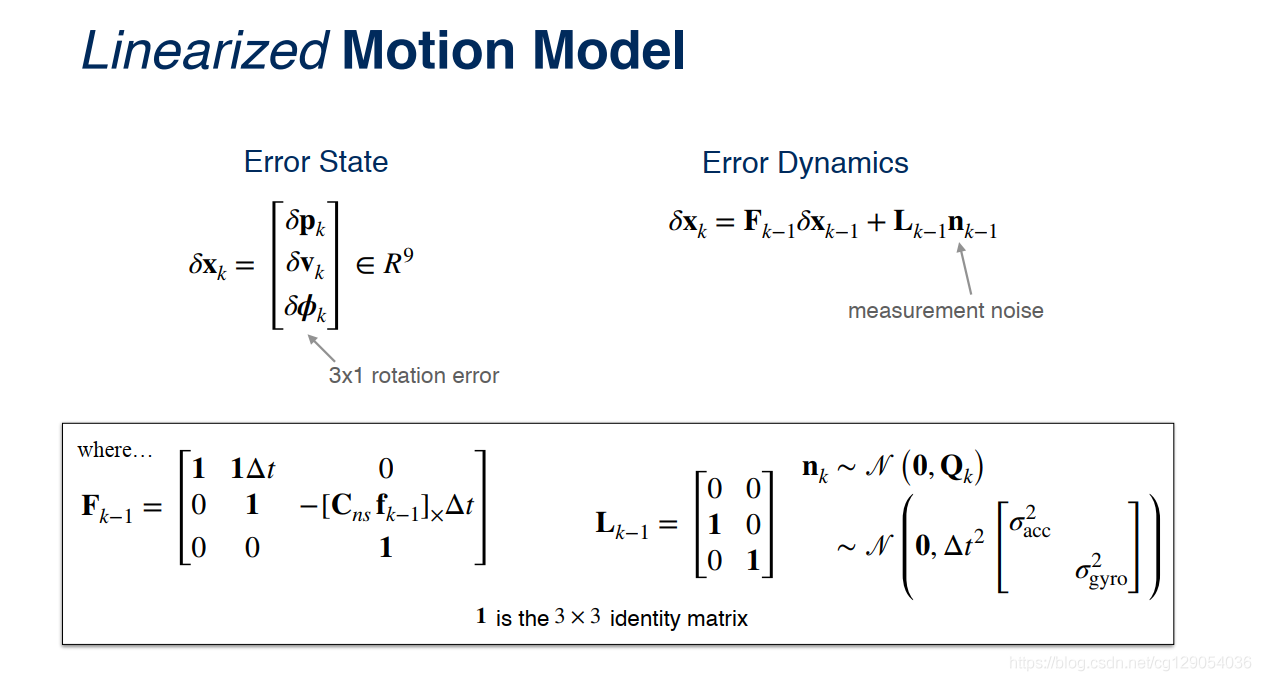
但上面的模型不是線性的,課程中將上面的模型進行線性化處理,結果如下,處理后的誤差狀態向量為9維的狀態向量,這里需要關注的是狀態轉移矩陣
F
k
?
1
F_{k-1}
Fk?1?,噪聲協方差矩陣
L
k
?
1
L_{k-1}
Lk?1?,
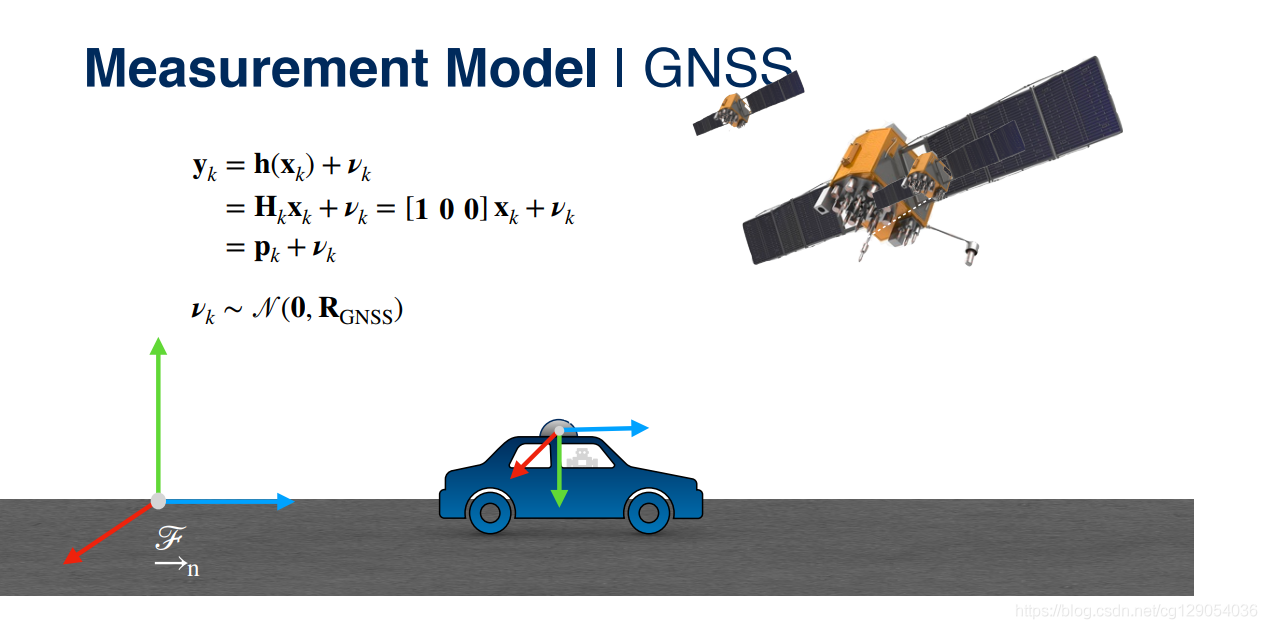
3.3 Measurement Model
測量模型如下,這里我們需要用到的是GPS的位置資料,
3.4 Sensor Fusion
介紹完理論部分,下面我們開始一步步實作代碼部分,
(1)使用IMU資料進行更新,需要注意旋轉矩陣的計算,
# 1. Update state with IMU inputs
C_ns = Quaternion(*q_est[k-1]).to_mat() #rotational matrix
C_ns_dot_f_km = np.dot(C_ns, imu_f.data[k-1])
# 1.1 Linearize the motion model and compute Jacobians
p_est[k] = p_est[k-1] + delta_t * v_est[k-1] + (delta_t**2)/2.0 * (C_ns.dot(imu_f.data[k-1]) + g)
v_est[k] = v_est[k-1] + delta_t*(C_ns.dot(imu_f.data[k-1]) + g)
# Instead of using Omega, we use quaternion multiplication
q_est[k] = Quaternion(axis_angle = imu_w.data[k-1] * delta_t).quat_mult_right(q_est[k-1])
(2)狀態協方差矩陣的更新
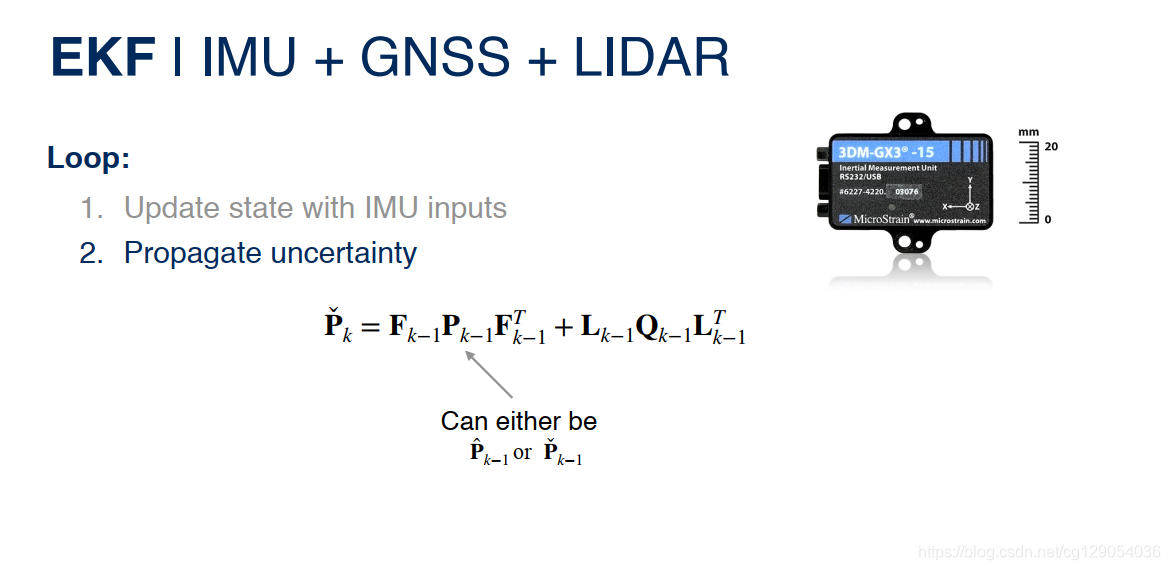
# 2. Propagate uncertainty
# Global orientation error, over local orientation error
# See Sola technical report
F = np.identity(9)
F[:3, 3:6] = delta_t * np.identity(3)
#F[3:6, 6:] = -(C_ns.dot(skew_symmetric(imu_f.data[k-1].reshape((3,1)))))
F[3:6,6:9] = -skew_symmetric(C_ns_dot_f_km) *delta_t
Q = np.identity(6)
Q[:, :3] *= delta_t**2 * var_imu_f
Q[:, -3:] *= delta_t**2 * var_imu_w
p_cov[k] = F.dot(p_cov[k-1]).dot(F.T) + l_jac.dot(Q).dot(l_jac.T) #uncertainty
(3)計算kalman增益
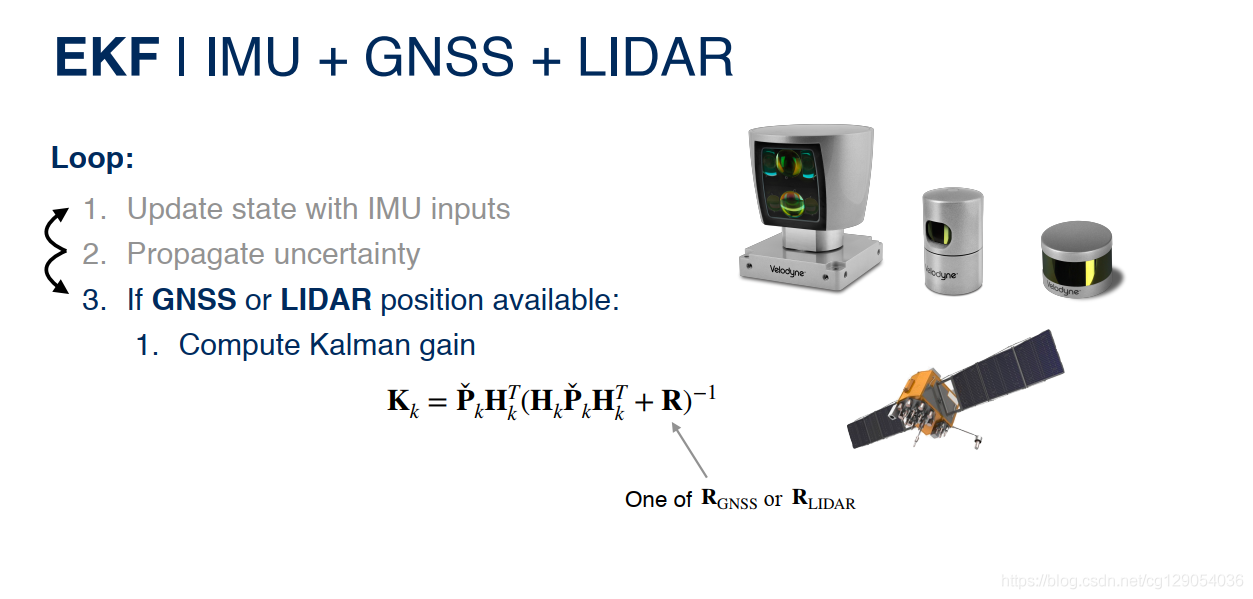
# 3.1 Compute Kalman Gain
K_k = p_cov_check.dot(h_jac.T).dot(np.linalg.inv(h_jac.dot(p_cov_check).dot(h_jac.T)+np.identity(3)*sensor_var))
(4)計算誤差狀態
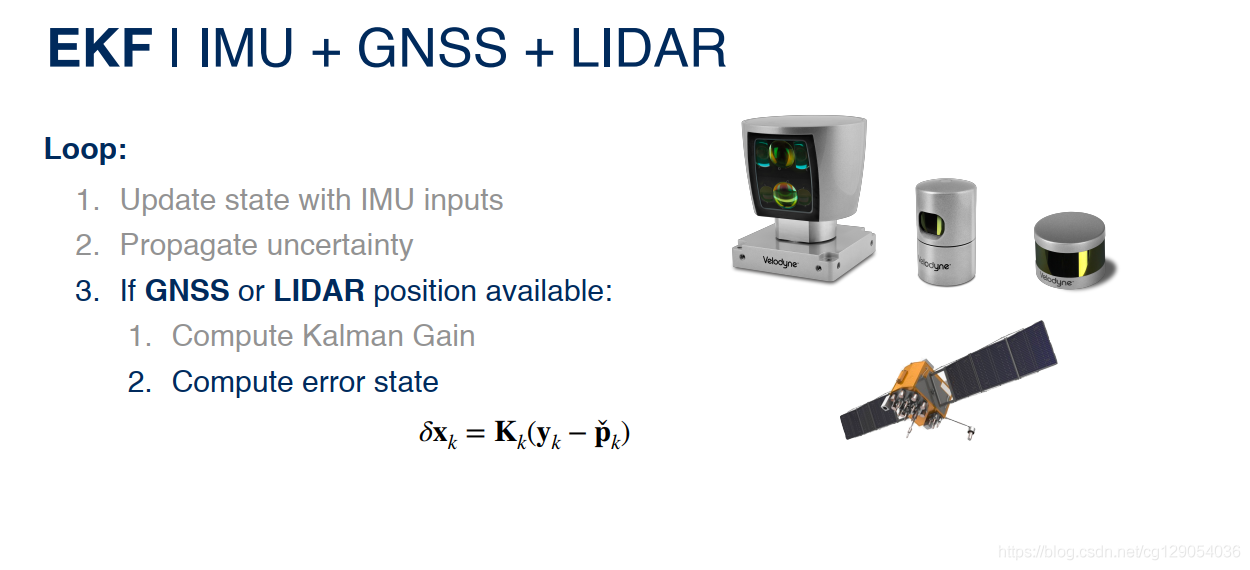
# 3.2 Compute error state
errorState = K_k.dot(y_k - p_check)
(5)誤差狀態修正
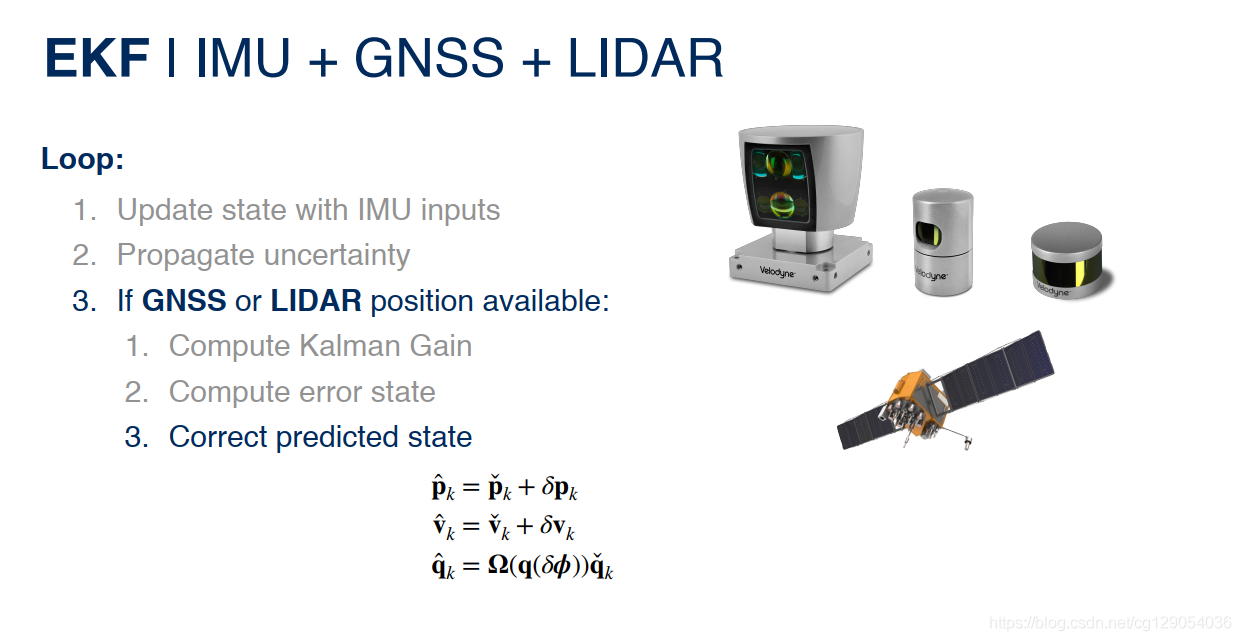
# 3.3 Correct predicted state
p_hat = p_check + errorState[:3]
v_hat = v_check + errorState[3:6]
q_hat = Quaternion(euler=errorState[6:]).quat_mult_left(\
q_check) # left or right
(6)修正狀態協方差矩陣
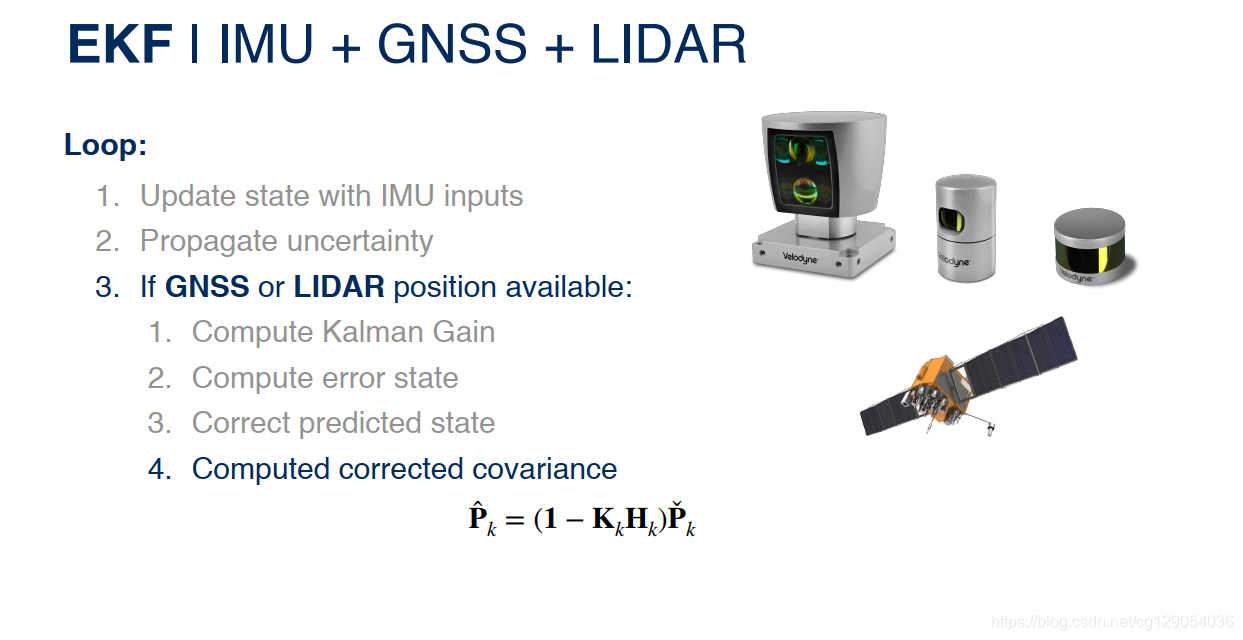
# 3.4 Compute corrected covariance
p_cov_hat = (np.identity(9) - K_k.dot(h_jac)).dot(p_cov_check)
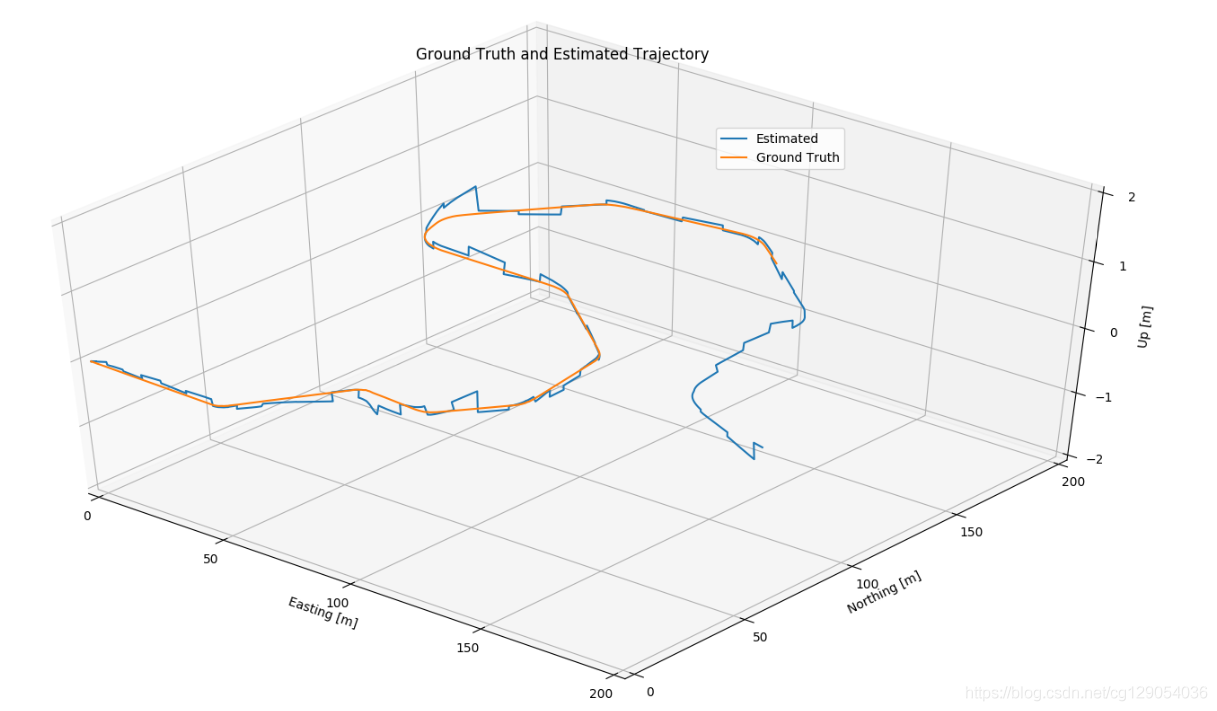
到這一步,就完成了整個處理程序,可以看看最終的結果,途中橙色為軌跡真值位置,藍色為估計的軌跡位置,
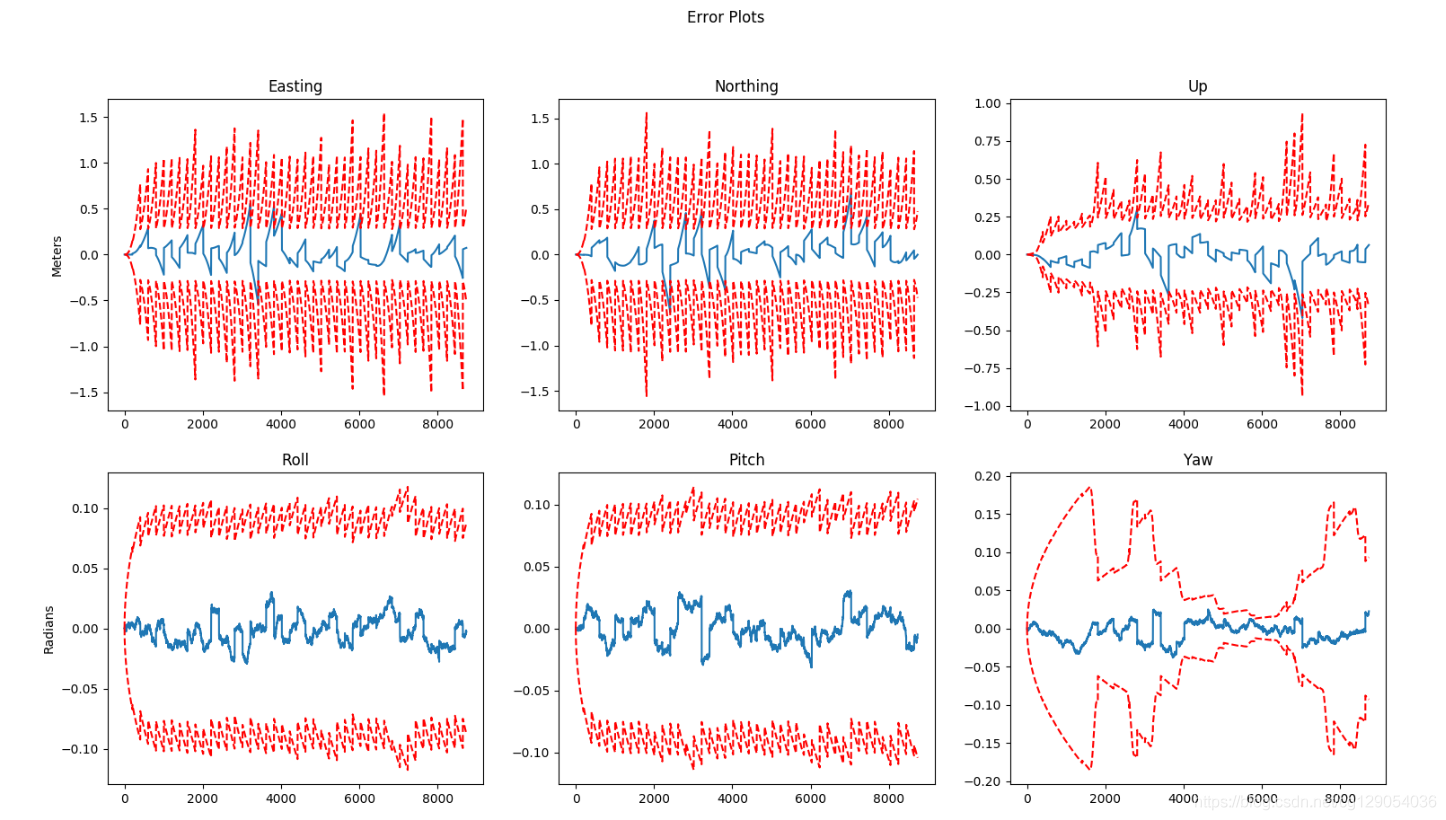
也可以繪制誤差分布圖,如下圖所示,這里使用的
3
σ
3\sigma
3σ標準,
至此,本文要介紹的內容就結束了,基于IMU和GPS的位置定位,關鍵點在于IMU的運動模型,特別是四元數更新部分,里面牽涉到的變化比較多,需要留心,
 CSDN認證博客專家
自動駕駛
3D目標檢測
3D目標追蹤
CSDN認證博客專家
自動駕駛
3D目標檢測
3D目標追蹤
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/227170.html
標籤:AI