RefineDet可以看成是SSD,RPN,FPN演算法的結合,其主要思想是:Faster-RCNN等two-stage演算法,對box進行兩次回歸,因而精度高,但是速度慢;YOLO等one-stage演算法,對box只進行一個回歸,速度快,但是精度低.RefineDet將兩者結合起來,對box進行兩次回歸,但是是one-stage演算法,既提高了精度,同時速度也較快.RefineDet的框架是SSD,同時引入了FPN的特征融合操作,提高對小目標的檢測效果.
YOLO等one-stage演算法,通過設定固定尺寸的Anchor Box來進行回歸,RefineDet改變了這一點,其Anchor Box的尺寸不再是固定的,而是變化的,由一個專門的Branch預測Anchor Box的尺寸,再由另一個Branch在預測的Anchor Box的基礎上進行回歸,從而提高了精度.RefineDet網路的結構圖如下所示,主要由三個部分組成:Anchor Refinement Module (ARM) ,Object Detection Module (ODM)和Transfer Connection Block (TCB).
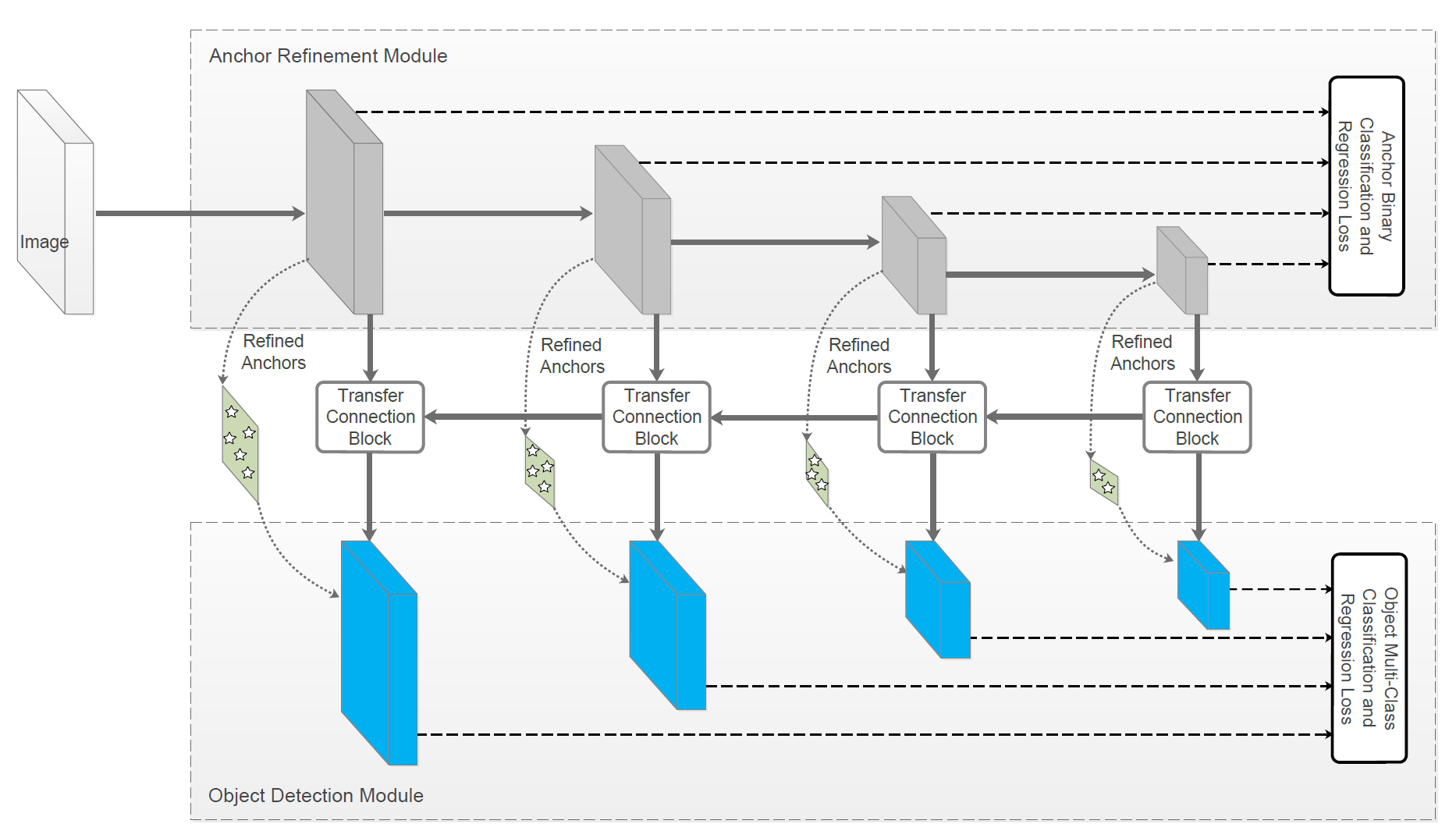
ARM負責對Anchor Box進行前景,背景二分類以及回歸,ODM負責在ARM輸出的基礎上,回歸以后的Anchor Box進行多類回歸和分類.兩者均采用了FPN結構,中間通過TCB連接起來,TCB的結構如下圖所示:
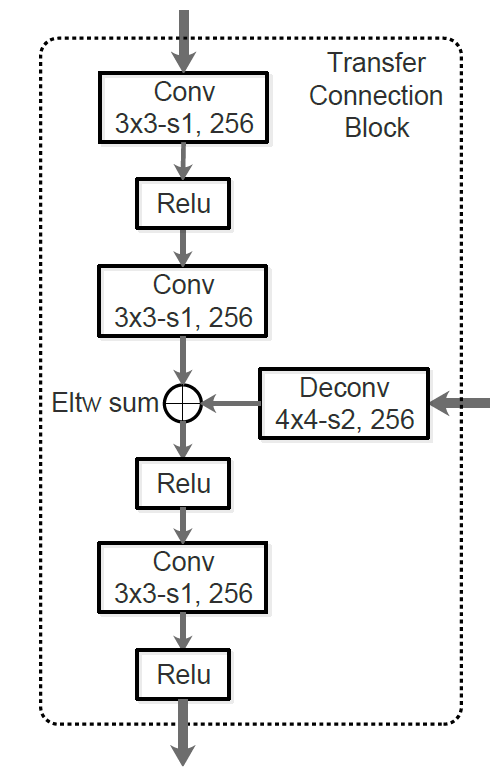
其中最后一層不需要Deconv.
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/228774.html
標籤:其他