前述作業:
(1)將二次開發的h檔案和lib檔案拷入pro的檔案夾,如圖:
(2)將dll檔案拷入debug檔案夾下,同時需要將kerneldlls檔案夾放入debug檔案夾下,與exe檔案同一個檔案夾,如圖:
昨天由于kerneldlls檔案夾沒有放入debug檔案夾下,導致程式功能不能正常運行,即:
FLAG = VCI_OpenDevice(nDeviceType,nDeviceInd,nReserved);呼叫打開can口命令后,可以編譯,可以運行,但是FLAG就是一直是FALSE,說明can口沒有打開,找了很多資料后,確定是:不能僅僅將kerneldlls檔案夾下的usbcan.dll檔案放到debug檔案夾下,而是要將kerneldlls檔案夾整體放在debug檔案夾下,這樣程式才能正確呼叫,并順利打開can口,
(3)添加h檔案,如圖:
這個是基本操作,就不再說怎么添加controlcan的h檔案的了,
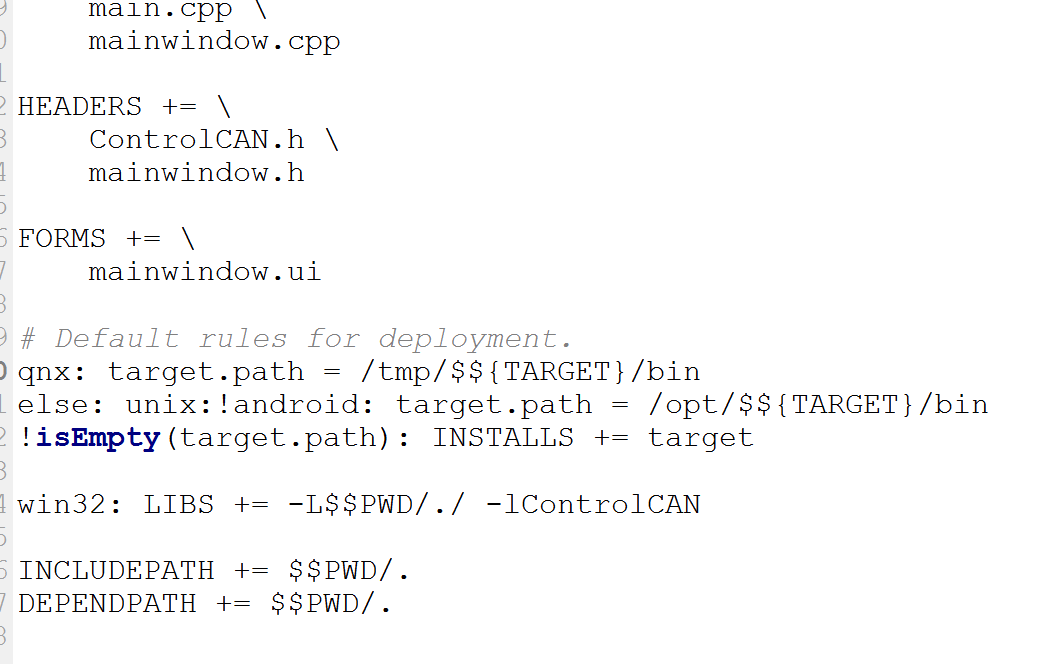
(4)添加庫檔案,添加后如圖所示,win32行,注意必須是x86檔案夾下的dll,h和lib,添加x64后會發生錯誤,
(5)修改controlcan.h檔案,由于資料型別不同,需要添加在其頭部添加#include "windows.h",并且選擇sleect encoding,選擇system,這個僅僅是漢字的問題,用系統自帶的就好,

這樣程式就能正確編譯和運行了,
第一部分:啟動和運行can口
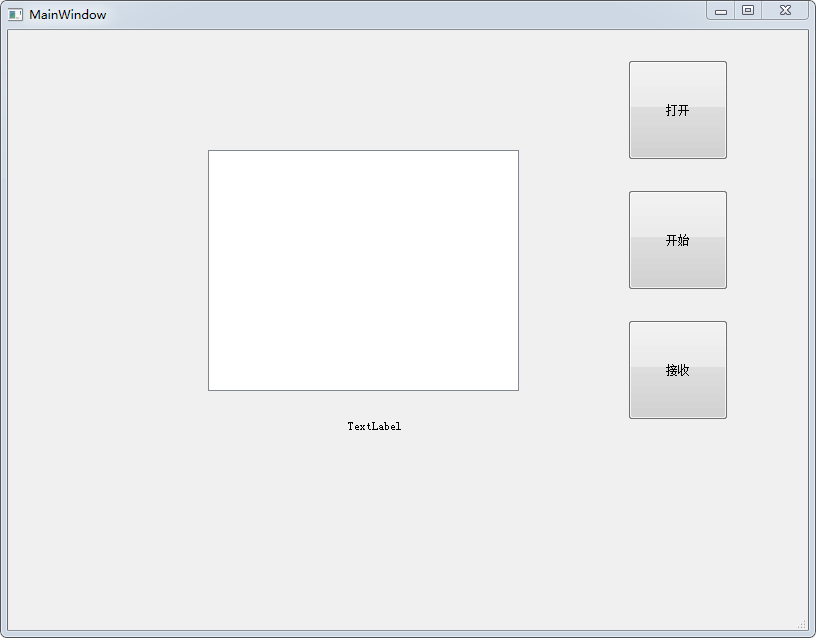
(1)先搞兩個按鈕在ui界面,一個打開can,一個運行can,添加槽函式,目的:打開can按鈕按下,打開can口和初始化can口;運行can按鈕按下,運行can口,
(2)引數初始化:其實不用知道啥意思,知道等于多少就行,我用的usbcan2,第一個引數就等于4,這個查閱下載的pdf就行,
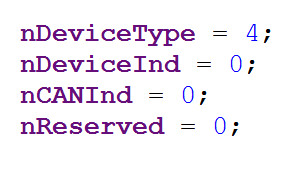
最后一個是結構體,為啥那么下,下載的pdf里面有例程,直接拿過來就好,,然后初始化結構體里面的引數,
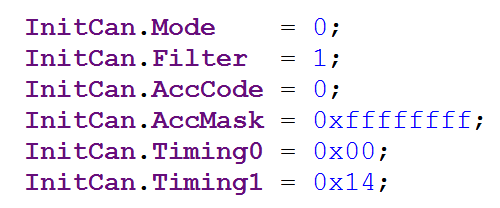
里面的具體意義查閱pdf,這個里面介紹的很詳細,并且耐著性子看,這個非常重要,好好的看一遍,反正沒幾頁,挺容易就熬過來了,其實當你把h檔案還有dll檔案加載好之后,后面的引數都會自己給你聯想出來,非常的方便,這幾個引數是設定波特率,掩碼還有模式啥的,和你的can通訊協議一致就好(can發送不能模擬,只能老老實實的通過硬體和can盒連接到電腦上,并且發送固定的資料),
(3)初始執行代碼
void MainWindow::on_OPEN_clicked()
{
FLAG = VCI_OpenDevice(nDeviceType,nDeviceInd,nReserved);
qDebug()<<FLAG;
FLAG = VCI_InitCAN(nDeviceType,nDeviceInd,nCANInd,&InitCan);
qDebug()<<FLAG;
}這是打開can按鈕的槽函式,點擊一下就open 和 init can口了,這個函式只能執行一次,同時列印出來的debug都是true,兩個true,確定是open成功,并且init成功,
void MainWindow::on_START_clicked()
{
FLAG = VCI_StartCAN(nDeviceType,nDeviceInd,nCANInd);
qDebug()<<FLAG;
}這是運行can按鈕的槽函式,點擊一下就運行can口了,執行之前,can盒上的燈是紅色的,執行之后就變成了綠色,并且閃爍周期和你的can接收周期一樣(取決于你用的哪個can盒,會有不同),列印出來的debug是true,說明can口啟動成功,可以正確的接收和發送資料了,
第二部分:接收資料
添加接收按鈕,添加槽函式,界面如下:
測驗代碼如下:可以列印出接收資料100個,至于receive函式怎么用法,可以好好看看debug,現在我也不是很明白100和400的意義,有待于進一步改寫數字加以確定,
ReceiveNum = VCI_Receive(nDeviceType,nDeviceInd,nCANInd,Receive,100,400);
qDebug()<<ReceiveNum;只要列印出來的資料不是FFFF,就可以保證can幀是可以正產接收的,
然后加入接收代碼:測驗代碼時應該已經添加,這里順序有點亂了,為了整體介紹,暫且放到后面,
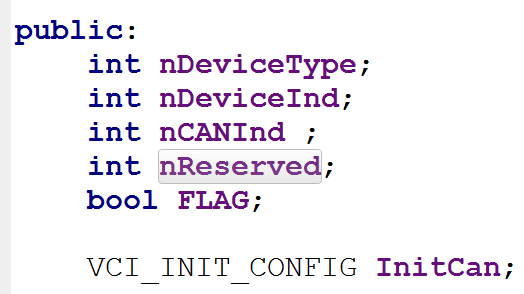
public:
int ReceiveNum;
VCI_CAN_OBJ Receive[100];其中num是接收個數,下面是個結構體,接收的100個結構體資料,就是說這100個資料中的單單1個資料就包含了很多資訊,其中有ID號,幀的格式,還有幀的長度,幀的資料,換句話說receive[0]里面有receive[0].ID,還有receive[0].data[0]到receive[0].data[7],具體看程式:
int strCANID;
int strFormat;
int strType;
int strLen;
int strData[8];
for (int i = 0; i < ReceiveNum; i++)
{
strCANID = Receive[i].ID;
strFormat= Receive[i].RemoteFlag;
strType = Receive[i].ExternFlag;
strLen = Receive[i].DataLen;
strData[0] = Receive[i].Data[0];
strData[1] = Receive[i].Data[1];
strData[2] = Receive[i].Data[2];
strData[3] = Receive[i].Data[3];
strData[4] = Receive[i].Data[4];
strData[5] = Receive[i].Data[5];
strData[6] = Receive[i].Data[6];
strData[7] = Receive[i].Data[7];
}Receive陣列是個結構體的陣列,可以將其中的值賦給我們定義好的int值,在傳輸can幀的時候一般都是固定的,遠程幀也是固定的,擴展幀也是固定的,就是除了資料幀之外,其他的幀基本都是固定的,將結構體中的值賦給定義的變數,就可以將變數取出進行自己的設計了,
for (int i = 0; i < ReceiveNum; i++)
{
strCANID = Receive[i].ID;
strFormat= Receive[i].RemoteFlag;
strType = Receive[i].ExternFlag;
strLen = Receive[i].DataLen;
strData[0] = Receive[i].Data[0];
strData[1] = Receive[i].Data[1];
strData[2] = Receive[i].Data[2];
strData[3] = Receive[i].Data[3];
strData[4] = Receive[i].Data[4];
strData[5] = Receive[i].Data[5];
strData[6] = Receive[i].Data[6];
strData[7] = Receive[i].Data[7];
qDebug()<<strData[0]<<strData[1]<<strData[2]<<strData[3]<<strData[4]<<strData[5]<<strData[6]<<strData[7];
}加入資料段列印行,每個receive列印一次,列印8個8位,然后列印100次,經過測驗,輸出的值和自定義在can鏈路上的資料一致,可以基本確定程式執行是正確的,
第三部分:結論
(1)可以保證can口設定,打開,和接收資料的正確性,中間走了不少彎路,一方面百度了很多東西,從一個一個中尋找自己需要的資訊,并且加以試驗,另一方面給的例程中可以借鑒一部分書寫方法,還有一方面就是下載的函式說明pdf,
(2)完全在一個未知的領域搞自己不熟悉的東西,很痛苦,并且搞不出來更痛苦,只能靜下心一點一點的按照自己的邏輯一塊一塊的實作功能,一步一步的去除錯,沒啥捷徑可走,
(3)代碼時別人撰寫的,說明肯定能除錯通過,肯定是有方法去弄出來的,不能心急,越急越沒有辦法弄出來,pdf和參考網頁都是攻城獅的心血,需要借鑒過來,都是很寶貴的,能節省你的不少時間,
第四部分:展望
只能利用按鈕接收一次資料,估計需要執行緒,自定義線槽去接收全部資料,又是一個全新的知識,只能硬著頭皮繼續搞,
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/229301.html
標籤:其他
下一篇:物聯網平臺資料查詢操作步驟