
?第十六屆競賽競速比賽規則導讀
參加過往屆比賽的隊員可以通過下面內容了解第十六屆競賽規則主要變化,如果第一次參加比賽,建議對于本文進行全文閱讀,
- 競速比賽共分為為七個組別,詳細情況參加檔案第一節中的介紹,比賽組別是按照比賽任務來進行劃分,
- 在今年比賽中,由于引入更多的單片機贊助商,因此不同組別中的單片機使用規定有著比較大的區別,
- 在每個組別內允許所使用的單片機系列中,只要符合種類規定,單片機的數量不限,
- 車模所使用的電池可以是原車模廠商配套的鎳鎘動力電池(7.2V,2AH),也可以是埠電壓在12.6 V以內配有電池板護板的鋰電池,
- 第十六屆的信標的 引導方式是通過高頻電磁場和燈光來引導,這一點與之前比賽中的信標有很大區別,相關信標規格和對現有信標的改造方案將另文公布,
- 第十六屆比賽引入了一種新的車模:單車(前后輪的兩輪車),用于室外電磁拉力比賽,
- D,E 兩輪車模不允許通過增加第三輪改裝成三輪車參加雙車組的比賽,F車模不允許更換原車模配的萬向轉向輪,
- 競賽正式檔案發布官方網站為:smartcar.cdstm.cn/index

- 競賽交流微信公眾號:tsinghuazhuoqing
一、前言

全國大學生智能車競賽是從2006開始,由 教育部高等教育司委托高等學校自動化類教學指導委員會 (教高司函[2005]201號文)舉辦的旨在加強學生實踐、創新能力和培養團隊精神的一項創意性科技競賽,至今已經成功舉辦了十五屆,在繼承和總結前十五屆比賽實踐的基礎上,競賽組委會努力拓展新的競賽內涵,設計新的競賽內容,創造新的比賽模式,使得圍繞該比賽所產生的競賽生態環境得到進一步的發展,
為了實作競賽的"立足培養、重在參與、鼓勵探索、追求卓越"的指導思想,競賽內容設定需要能夠面向高校學生和教學內容,同時又能夠兼顧當今時代科技發展的新趨勢,比賽形式包括有競速比賽與創意比賽兩大類,競速比賽中包含不同的組別,難度適合高校不同年級學生參賽,在競速賽基礎上,適當增加挑戰性,形成創意比賽的內容,適合部分有條件、能力強的本科、專科生和研究生參加創意比賽,
參賽選手須使用競賽秘書處統一指定的競賽車模套件,不同組別會指定所使用的單片機種類,參賽隊伍自主構思車模控制方案進行系統設計,包括傳感器信號采集處理、電機驅動、轉向舵機控制以及控制演算法軟體開發等,完成智能車參賽作品工程制作及除錯,
競賽分為分賽區比賽和全國總決賽兩個階段,參賽隊伍的名次(成績)由賽車現場成功完成賽道比賽時間來決定,參加全國總決賽的隊伍同時須提交車模技術報告,
競賽秘書處制定如下比賽規則適用于各分/省賽區比賽以及全國總決賽,在實際可操作性基礎上,保證競賽的公開、公平與公正,
為了兼顧現在比賽規模的要求,同時避免同組別內出現克隆車的情況,能夠便于參賽學校在有限的場地內使用兼容的賽道完成比賽準備,競速比賽將按七個組別進行設定,具體包括有:
- 基礎四輪組
- 節能信標組
- 電磁越野組
- 雙車接力組
- 全向行進組
- 單車拉力組
- 專科基礎組
創意組別(也稱提高組別)相關要求將會另行檔案公告,
二、比賽器材

?1 .車模
(1)車模種類
競速組比賽車模包括有指定標準車模和自制車模兩大類,
指定標準車模用于除節能信標組之外的其它競賽組別,車模規格和生產廠家資訊請參見 附錄1:車模資訊 ,
節能信標組可以使用任何商用車模進行改裝、或者自制車模,
參賽隊伍需要按照不同組別指定的車模制作參賽作品,
(2)車模修改要求
指定車模作為比賽統一平臺,對于車模的機械的調整與修改有著嚴格要求,具體要求參見 附錄2:車模修改要求,除此之外,競賽車模作品完成之后,還需要滿足各組別對于車模作品外型尺寸的限制,
對于參加節能組車模的改裝則沒有具體限制,
?2 .電子元器件
(1)微控制器
1、按照不同賽題組別,競賽車模主控電路分別采用英飛凌公司(Infineon)、宏晶公司(STC)、靈動微電子(MindMotion)、沁恒微電子(WCH)出品的微控制器作為車模中主要可編程主控制器;
(1) Infineon推薦使用微控器型號:
- TC264 , TC212
- TC377 , TC364
(2) STC推薦使用芯片:
- STC16F40K128-36I-LQFP64、STC8H8K64U-48I-LQFP64、
- STC8H3K64S4-48I-LQFP48、STC8A8K64S4A12-28I-LQFP64/LQFP48,
- 優先推薦硬體USB芯片:STC16F40K128-36I-LQFP64、STC8H8K64U-48I-LQFP64
(3) MindMotion限定使用芯片:
- MM32SPIN27PS 96MHz M0
- MM32F3277G9P120MHz M3
(4) WCH限定使用RISC-V架構芯片:
- CH32V103
2、如果所選用的傳感器或者其它電子部件中也包含有微處理器,對此微處理器的種類和數量不做限制,但其不得參與對于賽道資訊識別和處理、不參與車模運動決策與控制;
3、針對某些特殊電子模塊的允許使用或者禁止使用組委會將會另行公布相應器材清單進行說明,
(2)傳感器
1、傳感器的種類需要根據不同競賽組別而進行的選用,具體請參見"比賽任務"中關于各比賽組別所允許使用的傳感器型別說明,
2、傳感器的數量由參賽隊伍自行確定,不再限制,
(3)伺服電機
- 定義: 車模上的伺服電機是指除了車模原有驅動車輪的電機之外的電機,包括舵機、步進電機或者其它種類的電機,

▲ 車模上的伺服電機
-
數量限制: 車模上的伺服電機數量不能夠超過三個,其中包括轉向控制舵機,轉向舵機(B,C車模中的舵機)只允許使用原車模配的舵機型號,且只允許使用一個舵機,
-
功能限制: 車模上的額外增加的伺服電機只能用于控制車模上的傳感器的方位,或者改變車模底盤姿態,不允許直接或者間接控制車模的轉向、改變車模車輪速度,
?3 .電路板
競賽智能車中,除單片機最小系統的核心子板、加速度計和陀螺儀集成電路板、攝像頭、舵機自身內置電路外,所有電路均要求為自行設計制作,禁止購買現成的功能模塊,購買的單片機最小核心子板上,只允許帶有單片機、時鐘、電源以及單片機除錯介面,
自制的PCB板包括但不限于傳感器及信號調理、電源管理、電機驅動、主控電路、除錯電路等,如果自制電路采用工廠加工的PCB印制電路板,必須在銅層(TopLayer或BottomLayer)醒目位置放置本參賽隊伍所在學校名稱、隊伍名稱、參賽年份,對于非常小的電路板可以使用名稱縮寫,名稱在車模技術檢查時需要直接可見,(如果電路板的面積小于1平方厘米,可以不用帶有隊伍特有資訊,)
三、比賽環境

?1 .賽道
(1)賽道材質
室內賽道采用PVC耐磨塑膠地板材料制作,材料與前幾屆比賽相同,
節能信標組沒有固定賽道,地面材質沒有特別指定,
室外賽題組(包括電磁越野組、單車拉力組)只是使用電磁引導線,不鋪設專用賽道表面,
(2)賽道的尺寸、形狀、間距
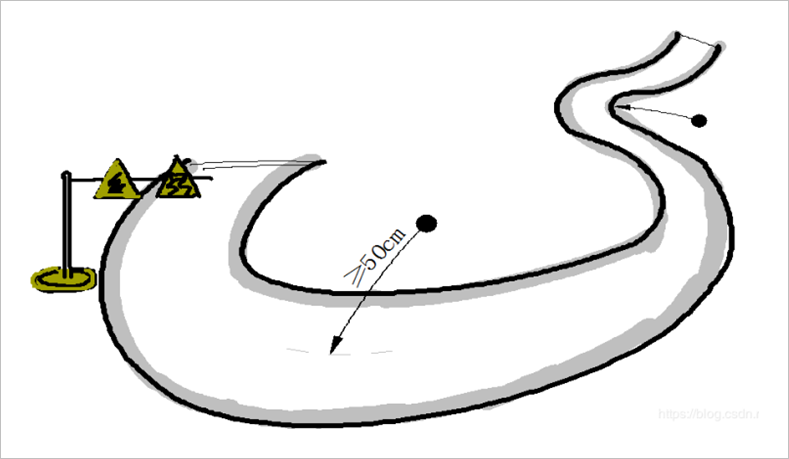
基礎四輪組、雙車接力組、全向行進組、專科基礎組所使用的室內賽道寬度(包括黑色邊界引導線)不小于45cm,預賽階段的賽場形狀為邊長約5m×7m長方形,決賽階段的賽場約為預賽階段的兩倍,兩條相鄰賽道中心線之間的間距不小于60cm,賽道中存在著直線、曲線、十字交叉路口等,曲線的曲率半徑不小于50cm,如下圖所示:
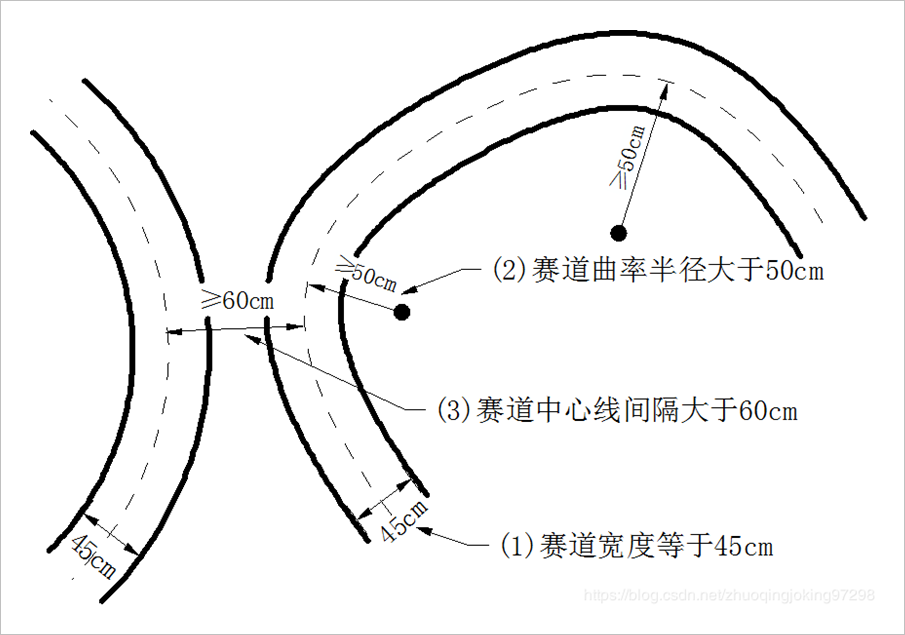
▲ 賽道基本尺寸
室外電磁越野組和單車拉力組沒有賽道,只有電磁引導線,比賽場地選擇室外的比較寬闊的平整場地,比如室外籃球場、草地、硬質道路路面等,場地內可能會存在高度不大于2厘米的硬質路坎、沙坑、深度不超過2厘米的水坑等,
室外電磁賽道的幾何約束條件包括:
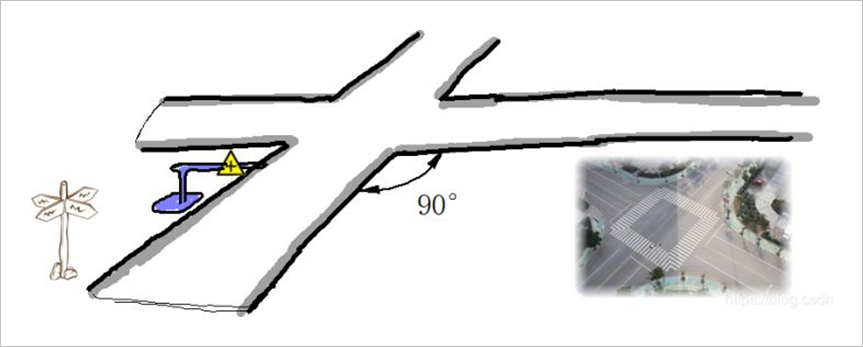
(1)賽道基本形狀是由折線組成
為了便于固定電磁線,封閉電磁賽道是由折線線段組成,折線夾角不小于90°,折線長度不小于25厘米,
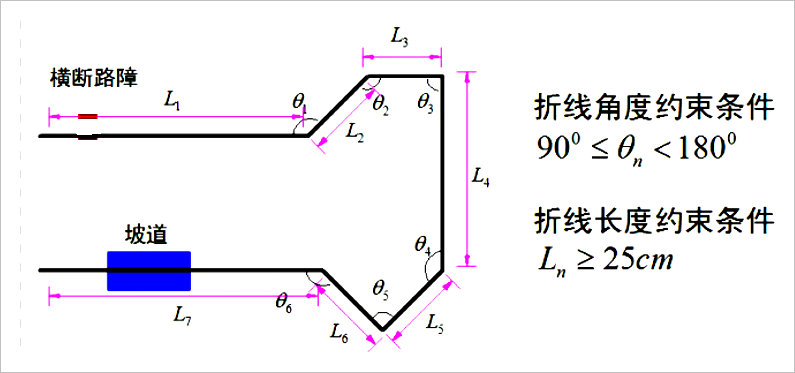
▲ 賽道折線幾何引數
(2)環島的鋪設方法
室外賽道的環島是由折線組成的正六邊形組成,正六邊形的邊長不小于100厘米,
正六邊形的中心與頂點的連線與相鄰直道垂直,相鄰直道左右長度各自不小于150厘,
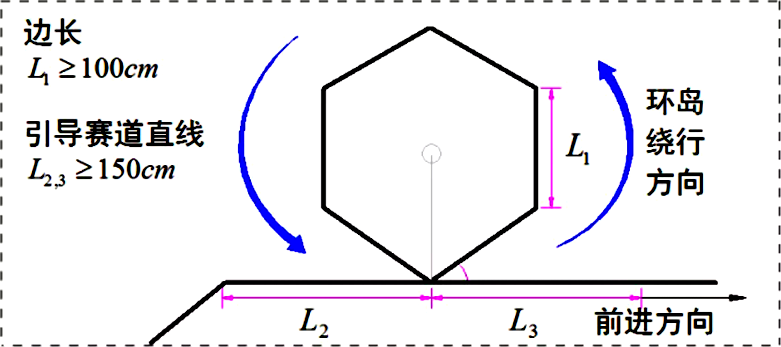
▲ 六邊形環島
(3)賽道中兩條相鄰平行電磁線之間的距離
兩條相鄰賽道之間的最小距離為100厘米,
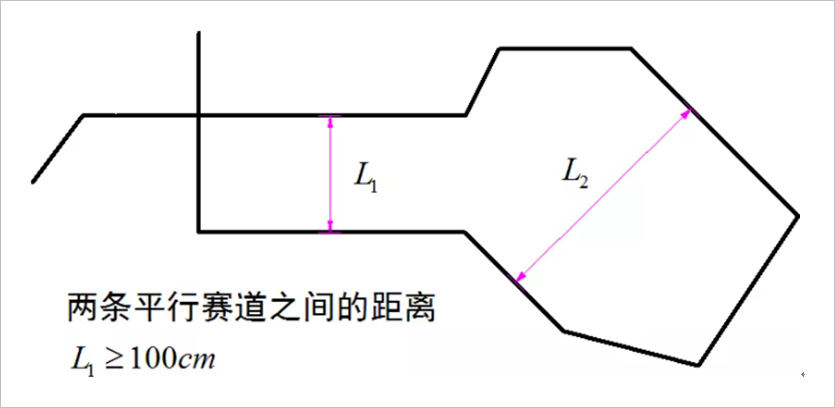
▲ 電磁引導線之間的最小距離
(4)錐桶與電磁線之間的距離
在賽道折線所有的內角處都布置交通錐桶,車模在運行的程序中必須在交通錐桶的外側繞行,交通錐桶的幾何尺寸如下:
- 高度在70厘米;
- 底寬不大于35厘米;
- 顏色可以具有紅色和白色;
交通錐桶中心距離鋪設的電磁引導線的距離不小于80厘米,因此,賽道中折線組成的等效轉彎半徑不小于80厘米,
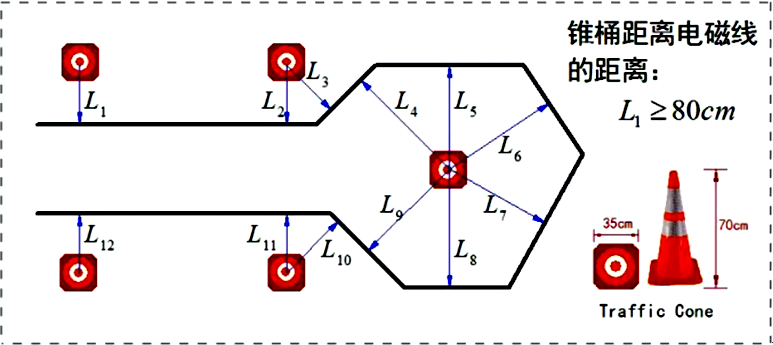
▲ 交通錐桶距離電磁線的距離
(3)賽道引導方式
室內賽道上都具有邊界線和電磁引導線;信標組使用聲音信標導引;室外越野和單車拉力組使用電磁引導線,
1、賽道邊界線: 賽道兩側鋪設有黑色邊界線用于賽道引導,邊界線的寬度為25±5mm,如下圖所示:
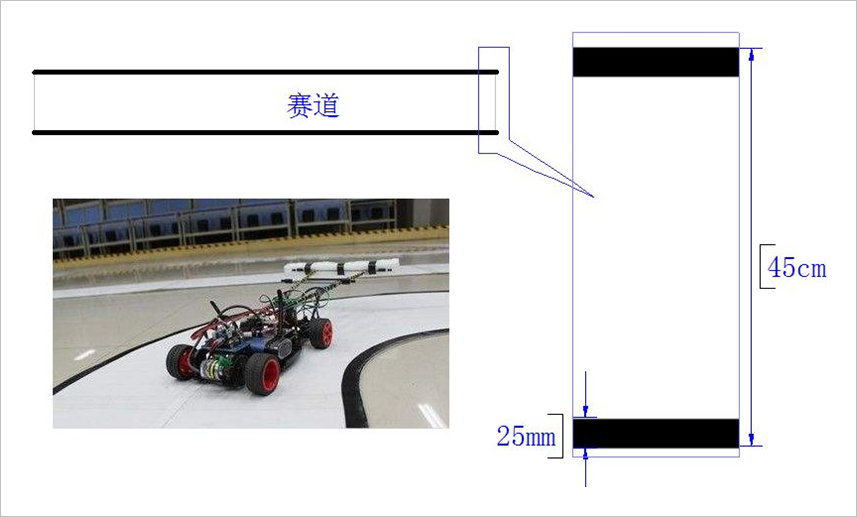
▲ 賽道邊界線引導
2、中心電磁導引: 賽道鋪設有中心電磁引導線,引導線為一條鋪設在賽道中心線上,直徑為0.1~1.0mm的漆包線,其中通有20kHz、100mA的交變電流,頻率范圍20k±1kHz,電流范圍100±20mA,
3、電磁線信號源: 參賽隊伍可以使用自行制作的信號源,信號源通過單通道耳機插頭直接插入現場信號源的插座中,即可替代預設的信號源,為場地內的電磁導線提供信號激勵了,
選手自帶信號源所使用的信號頻率、波形和幅度沒有任何限制,只要能夠滿足當前鋪設的電纜和插座中允許的最大電壓、電流和頻率范圍即可,
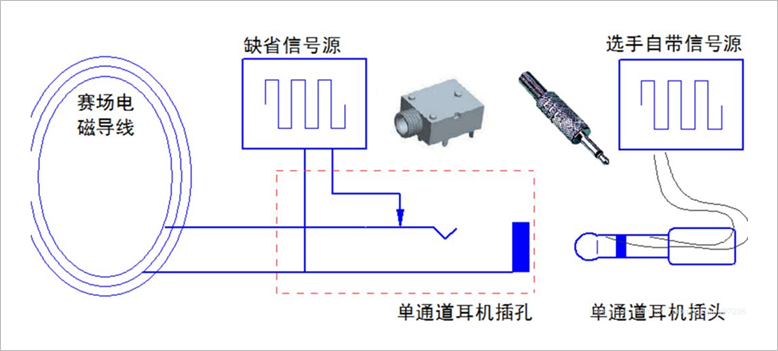
▲ 外接信號源介面示意圖
4、信標引導: 在鋪有藍色廣告布的平整場地內隨機安放5至15左右的信標,車模在信標的導引下做定向運動,第十六屆的信標主要通過高頻電磁場和燈光信號引導,關于信標的具體技術引數和制作方案參見《第十六屆智能車競賽信標比賽系統說明》,
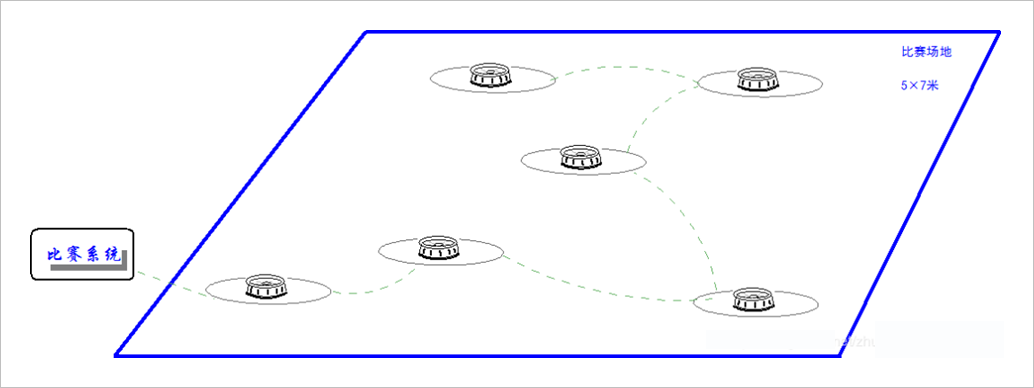
▲ 信標引導比賽場地
(4)起跑線標志
室內賽道競速比賽要求車模在比賽完畢后,能夠自動停止在停車區域內,
賽道起跑線的標志有兩種形式:
A.斑馬線起跑線: 如下圖所示,計時起始點處有一個寬度為10cm黑色斑馬線,斑馬線使用與賽道黑色邊線一樣的材料制作,
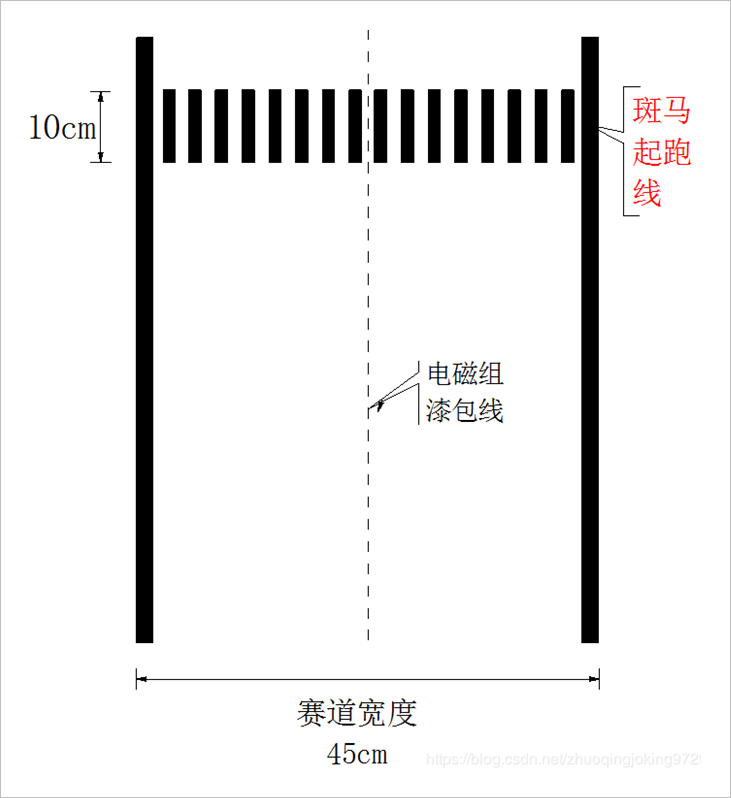
▲ 斑馬起跑線
B. 永久磁鐵標志: 在賽道中間安裝有永久磁鐵,磁鐵引數:直徑7.5 - 15mm,高度1-3mm,表面磁場強度3000-5000高斯,
起跑線附近的永磁鐵的分布是在跑道中心線兩邊對稱分布,相應的位置如下圖所示:
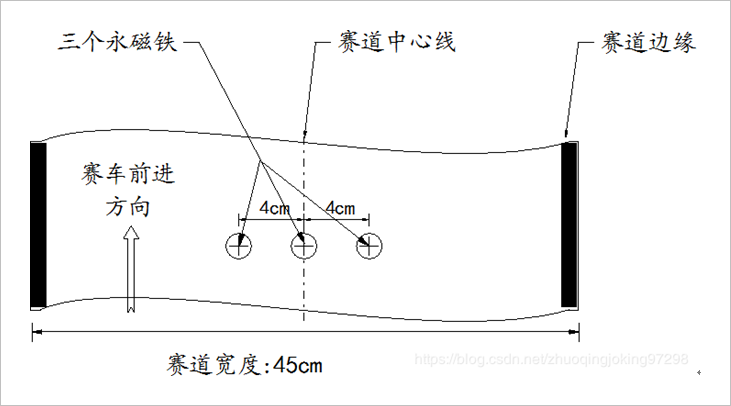
▲ 永久磁鐵標志
C. 車庫: 車庫元素是今年賽道元素新增的元素,車庫賽道元素是在起跑線旁設定的方形區域,它的尺寸如下圖所示:
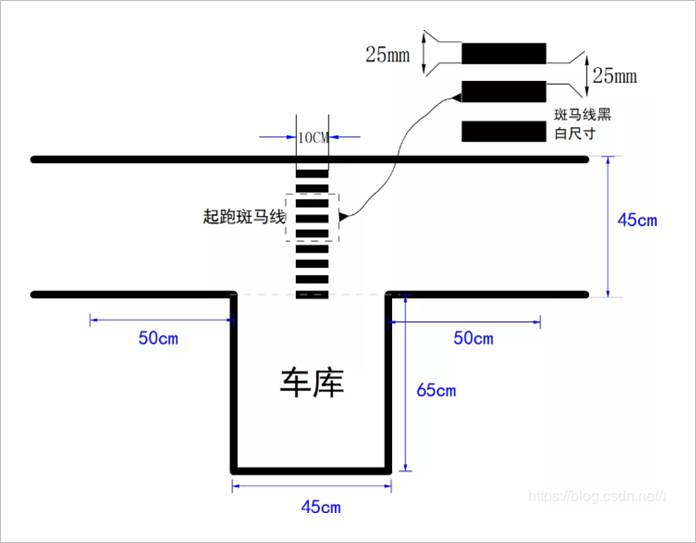
▲ 賽道車庫
車模出發是從車庫駛出,在運行兩周之后在駛入車庫內,比賽時間是從車模駛出車庫和回傳車庫之間的時間差計算,因此計時線圈是放置在車庫門口處,賽道上的斑馬線和斑馬線下的磁鐵放置與往屆規則相同,
車模出發和回傳進入車庫
對于電磁越野組、單車拉力組在起跑線處只設定永久磁鐵標志,不在設定斑馬線和車庫,
(5)賽道邊界判定
室內賽道組別要求車模在運行程序中保持在賽道內,在賽道邊緣處有可能粘貼兩層黑色高密度海綿條,形成賽道路肩,作為賽道邊界,也有可能不粘貼黑色高密度海綿條,海綿條寬度為2.5cm,兩層高度1cm,在賽道兩側相隔25cm粘貼,交錯分布,間隔處仍為黑色邊界,如下圖所示:
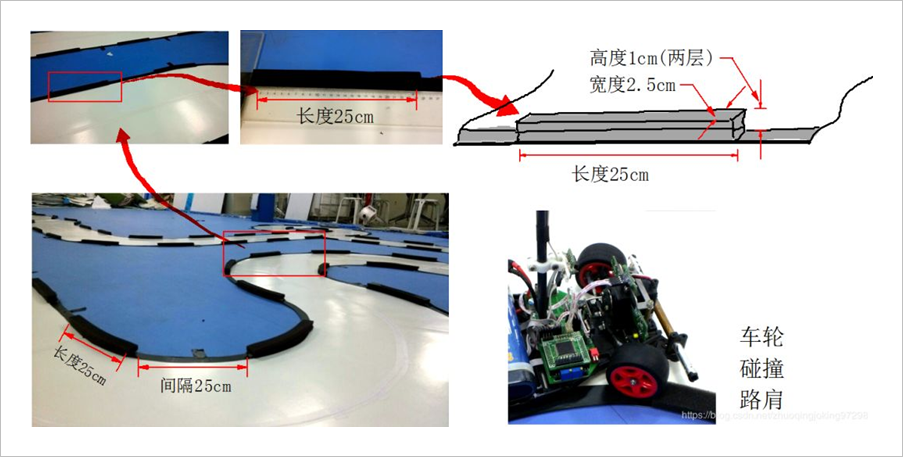
▲ 賽道路肩
帶有路肩賽道將會使用人工進行判罰車模是否沖出賽道,判罰方式和標準與以前比賽形式相同,
(6)賽道元素
除了節能信標組之外,室內賽道和室外電磁賽道是一個封閉曲線賽道,具有以下賽道元素,
注:賽道元素中的示意圖:圖例中除了賽道之外的交通標示只是用于賽道元素功能說明,在比賽現場的賽道周圍沒有這些交通標示,
1. 直線賽道: 這是賽道的基本形式,
▲ 直線賽道示意圖
2. 曲線彎道: 賽道中具有多段曲線彎道,這些彎道可以形成圓形環路,圓角拐彎,S型賽道等,賽道中心線的曲率半徑大于50厘米,
對于室外電磁越野組和單車拉力組,彎道是由折線組成,具體參見前面1.2節中關于室外電磁賽道幾何約束條件中的描述,
▲ 彎道賽道示意圖
3、十字交叉路口: 車輛通過十字交叉路口需要直行,不允許左轉、右轉,
▲ 十字路口示意圖
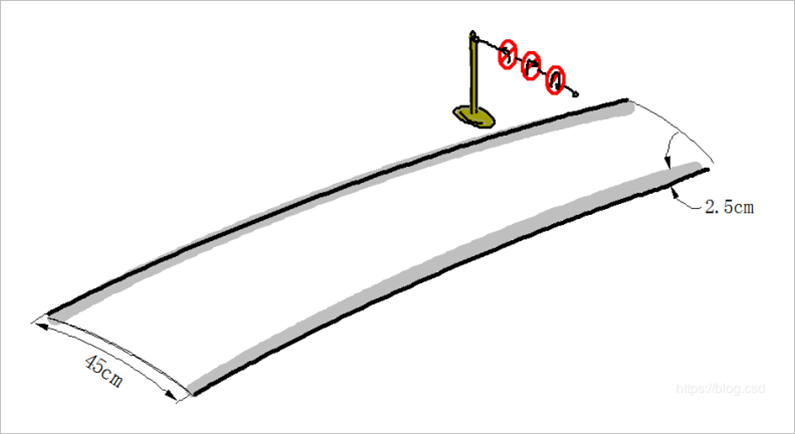
4、坡道: 坡道的坡度不超過20°,坡道可以不是對稱的,坡道的過渡弧長大于10厘米,坡道的長度、高度沒有限制,一般情況下坡道的總長度會在1.5米左右,電磁組的導引線鋪設在坡道的表面,
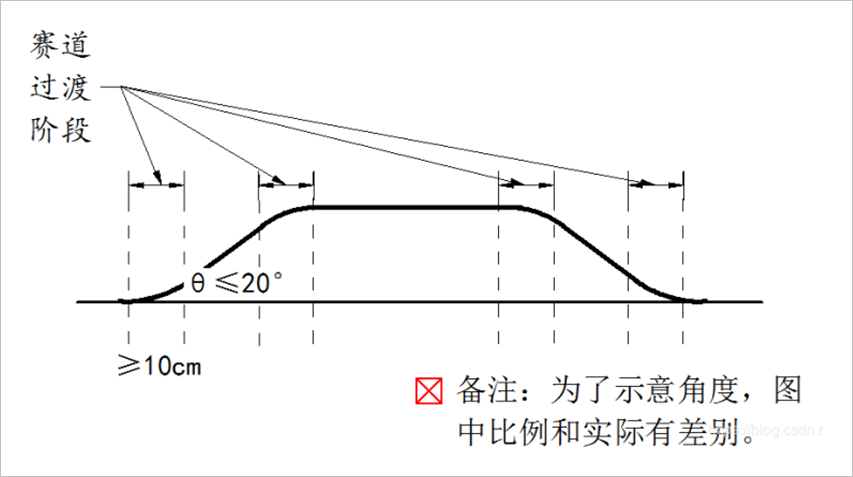
▲ 坡道示意圖
5、環島: 賽車經過環島時需進入環島繞行一周后繼續前行,環島中心線半徑不小于50厘米,電磁導線也是在環島繞行一周,
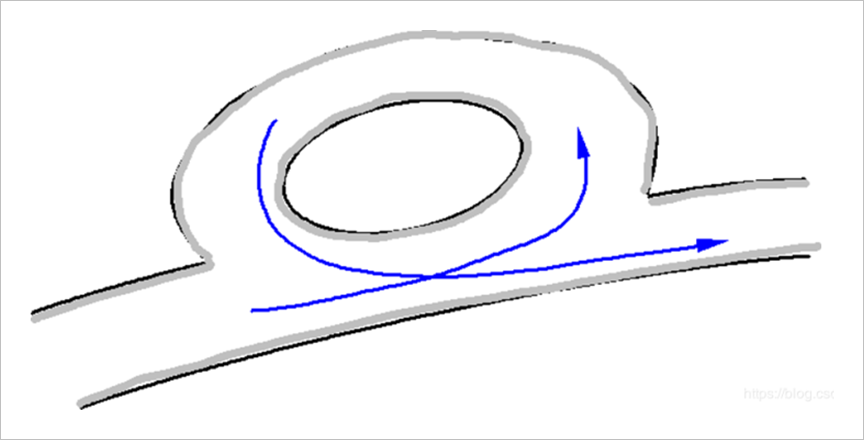
▲ 環島示意圖
6、三岔路口: 在賽道上存在兩個三岔路口,路口之間直線距離小于三米,三岔路口的三條進出口之間的夾角為120°,
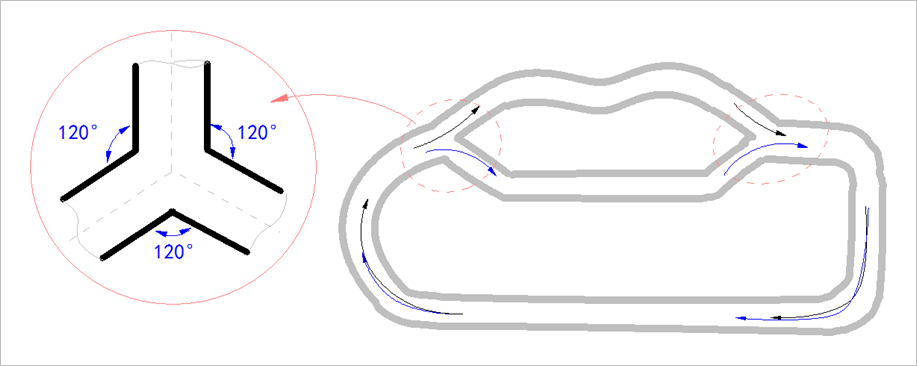
▲ 三岔路口示意圖
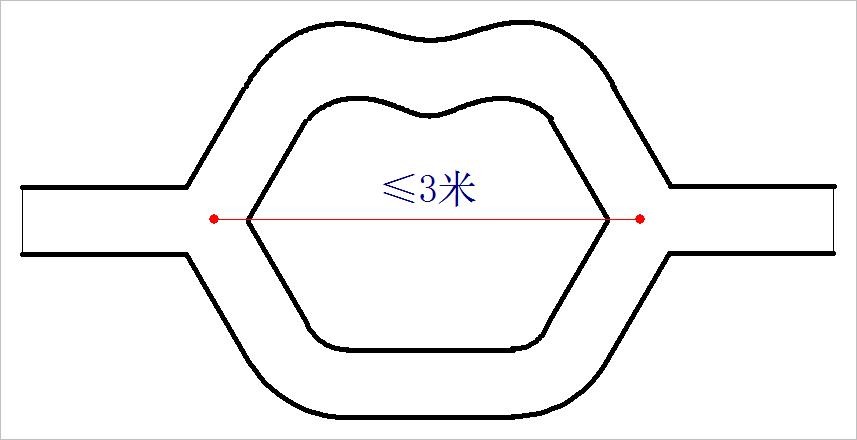
▲ 三叉路口示意圖
比賽中,車模將會沿著賽道運行兩周,每次途徑三岔路口時,分別選擇其中一條路徑駛過,車模將會在三岔路口兩進兩出,除了三岔路口之間的賽道外,賽道的其它路徑車模將會行駛兩遍,在一定程度上增加了賽道的利用率,
?2 .比賽場地
(1)賽道地面
賽道場地地面平整,如果地面是平滑的水泥、水磨石、大理石地面則可以直接安裝,
地面顏色要求:與白色賽道有一定的色差,顏色可以根據現場底板的情況確定,一般情況下會采用藍色的廣告布鋪設賽道背景顏色,具體比賽現場的賽道背景顏色將會在正式比賽前一個月進行正式公布,
電磁越野、單車拉力組別在室外比賽,一般選擇在寬闊的操場,籃球場,或者馬路上進行,對于地面沒有特殊的要求,
(2)賽道環境
賽道競速組、節能信標組一般會安排在室內場地,在比賽對于光線沒有限制,室外比賽程序中,如果遇到嚴重惡劣天氣(大雨、大風、冰雹、酷暑等)會暫停比賽,或者轉移到封閉、半封閉的室內比賽,對于輕微下雨天氣,比賽會繼續進行,
(3)賽場圍擋
室內比賽場地四周鋪設圍擋,圍擋距離賽道大于50厘米,圍擋高度不小于30厘米,圍擋的材質可以使用長方體泡沫塑料塊,也可以使用宣傳布,
?3 .裁判系統
比賽所使用的計時裁判系統將會實時自動測量車模運行時間、判定車模出界,
(1)車模計時磁標
比賽采用磁場感應方式記錄車模通過賽道起跑線的時刻,或者檢測車模是否運行在信標周圍22.5cm范圍內,感應線圈布置在賽道下面以及信標周圍,對于運行車模干擾小,同時車模也不容易沖撞計時系統,如下圖所示:
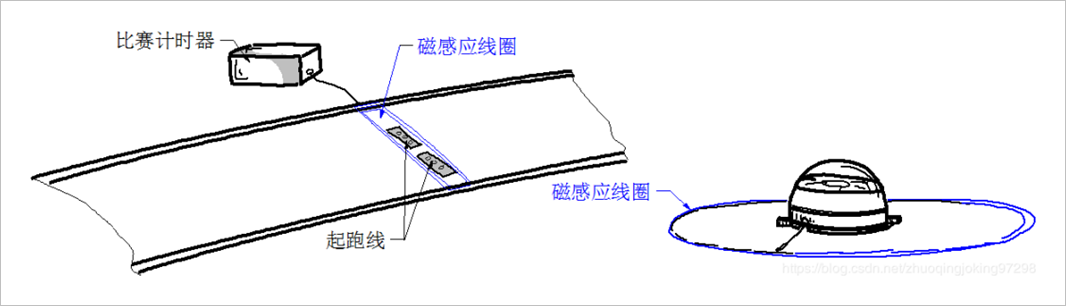
▲ 基于電磁感應的計時系統
為了能夠觸發計時系統,需要在車模底盤安裝一塊永磁鐵作為標簽,永磁鐵距離地面高度在2cm以內,由于該磁標體積很小,所以提高了車模檢測位置的精確度,具體按照方式如下圖所示:
▲ 車模上安裝的永磁計時磁標
計時磁標可以永久粘在車模的底盤上,也可以在比賽前臨時固定在車模的底盤或者電機上,具體磁標固定的位置并不要求精確,計時的程序是檢測該磁標前后通過磁感應線圈的時間間隔,
車模上的永磁標記由參賽車模自行準備,在比賽之前固定在車模上即可,
根據不同的比賽場景,比賽系統也可能會采用光電計時或者手工計時,屆時車模就無需進行任何的改動,或者安裝計時磁標,
(2)計時系統
比賽計時系統、信標控制系統由競賽組委會在現場統一安置,
參賽選手在平時訓練的時候,可以自行設計制作簡化的比賽系統輔助進行除錯車模,也可以參照競賽組委會提供 《第十六屆智能車競賽比賽系統說明》 來進行設計制作,
四、比賽任務

本節將就各個組別所能夠使用的車模、傳感器以及比賽所需要完成的任務指標進行介紹,
?1 .基礎四輪組
(1)車模
車模可以使用競賽指定B型車模中,車模運行方向不限,
車模作品制作完畢后,車模寬度不超過25厘米,高度不超過20厘米,長度沒有限制,如果安裝攝像頭傳感器,攝像頭鏡片中心的高度距離地面不超過10厘米,
(2)微控制器與傳感器
車模微控制器使用Infineon系列單片機,
允許使用各類電磁、紅外光電、攝像頭、激光、超聲傳感器器件進行賽道和環境檢測,
(3)比賽賽道與任務
比賽是在PVC賽道上進行,賽道采用黑色邊線和電磁進行導引,
選手制作的車模完成從車庫觸發沿著賽道運行兩周,然后在回傳車庫,車模需要分別通過三岔路口兩條岔路,
比賽時間從車模駛出車庫到重新回到車庫為止,如果車模沒有能夠停止在車庫內停車區內,比賽時間加罰五秒鐘,
?2 .全向行進組
(1)車模
車模使用H車模,
車模作品制作完畢后,車模長寬不超過30厘米,高度不超過30厘米,
(2)微控制器與傳感器
車模微控制器使用WCH系列單片機,
允許使用各類電磁、紅外光電、攝像頭、激光、超聲傳感器器件進行賽道和環境檢測,
(3)比賽賽道與任務
比賽是在PVC賽道上進行,賽道采用黑色邊線和電磁進行導引,
選手制作的車模完成從車庫觸發沿著賽道運行兩周,然后在回傳車庫,車模需要分別通過三岔路口兩條岔路,車模每經過三岔路口時,需要改變一次行進方向,即在車模前后行進和左右行進兩種模式下切換,
比賽時間從車模駛出車庫到重新回到車庫為止,如果車模沒有能夠停止在車庫內停車區內,比賽時間加罰五秒鐘,
?3 .雙車接力組
(1)車模
兩個車模分別使用三輪車模(F車模)和兩輪車模(D,E)
車模作品制作完畢后,車模寬度不超過25厘米,高度不超過20厘米,長度小于30厘米,
(2)微控制器與傳感器
微控制器使用MindMotion單片機,
允許使用各類電磁、紅外光電、攝像頭、激光傳感器、超聲傳感器器件進行賽道和環境檢測,
(3)比賽賽道與任務
一輛車模在三岔路口一條岔道中間停止,一輛車模從車庫出發,到達中間車模位置時,將車上的一個尺寸不小于40毫米見方的球體傳遞給第二輛車模,然后停止在原地等待,
第二輛車模帶著球體重新繞賽道一周停在三岔路口的另外一條岔道上,只要距離三岔路口一米距離以上之后,第一輛車模便可以重新啟動回傳到車庫,
在兩車接力程序中,直立車模允許暫時倒地,比賽計時以第一輛車駛出車庫開始計時,直到第一輛車重新回到車庫停止計時,如果第一輛車沒有最終反饋車庫,計時加罰五秒鐘,
傳遞的球體可以使用用標準的乒乓球,或者高爾夫球,也可以另外自制其他材質的球體,只要其直徑不小于40毫米即可,

▲ 雙車接力傳遞物品示意圖
?4 .節能信標組
(1)車模
車模允許使用任何比賽中的車模,也可以自行設計制作車模,車模作品尺寸不限,
車模上不允許使用任何電池,車模需要通過無線接收線圈獲取信標發送的無線電能,
信標燈為扁平狀,車模可以行駛到信標上面接受無線電能,
(2)微控制器與傳感器
車模微控制器使用Infineon系列單片機,
允許使用電感、RF天線、紅外光電、攝像頭傳感器、激光傳感器等,
(3)比賽賽道與任務
信標在點亮后同時會發送高頻無線功率信號(200kHz)和紅色、紅外燈光用于導引車模前往,發送的高頻無線功率信號也可以通過電磁共振耦合為節能車模提供大約100W充電功率,
比賽時,車模從第一個信標開始接受電能,自行啟動去往下一個信標,當車模運行到信標上之后,信標的燈便切換到下一個信標,但本地的信標依然發送無線電能,直到車模離開本地的信標燈,本地信標停止發送無線電能,下一個信標燈開始發送無線信號,
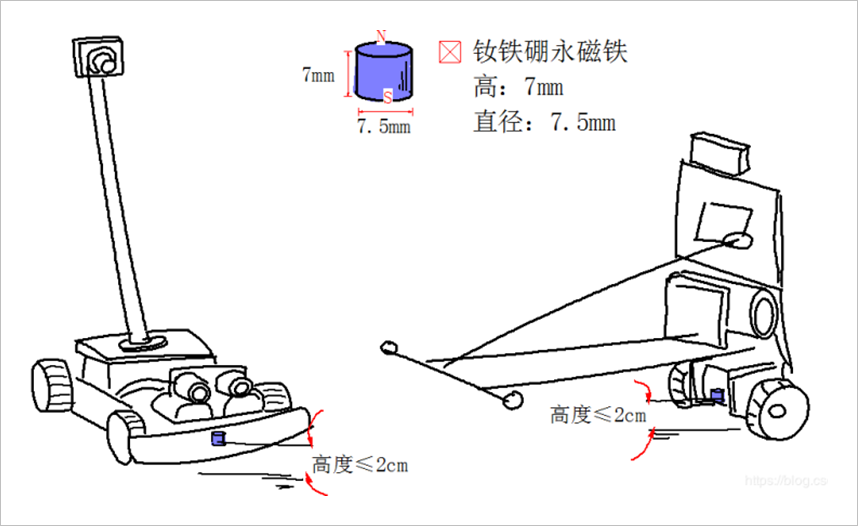
信標對抗組別中的磁標最多允許安裝四個,磁標距離車模底盤或者車輪直線距離不超過5厘米,距離地面高度不超過2厘米,
?5 .電磁越野組
(1)車模
車模可以使用競賽指定車模L越野車模,車模運行方向僅限于前行,
車模制作完畢后,車模作品長度不超過50厘米,寬度不超過40厘米,
(2)微控制器與傳感器
車模微控制器允許使用Infineon公司的單片機,
允許使用各類電磁、紅外光電、超聲傳感器器件進行賽道和環境檢測,不允許任何攝像頭傳感器、激光傳感器等,
(3)比賽賽道與任務
比賽沒有賽道,只有電磁線,但賽道元素包括有直道、彎道、坡道、十字路口,
選手制作的車模完成賽道運行一周,比賽時間從車模沖過起跑線到重新回到起跑線為止,如果車模沒有能夠停止在起跑線后三米的賽道停車區內,比賽時間加罰一秒鐘,
室外電磁組原則上選擇室外的馬路、草坪、體育場組織比賽,場地內可能會存在高度不大于2厘米的硬質路坎、沙坑、深度不超過2厘米的水坑等,
為了避免暑期比賽天氣炎熱,比賽時間可以選擇在傍晚有燈光的場地內完成比賽,遇到惡劣天氣,競賽組委會將比賽場地移至帶有頂棚的場地、室內進行,根據實際情況,減少比賽場地面積、比賽元素來適應實際比賽場地,在室內比賽中,可能會通過增加塑料人工草皮、鋪設沙土來增加比賽賽道的多樣性,
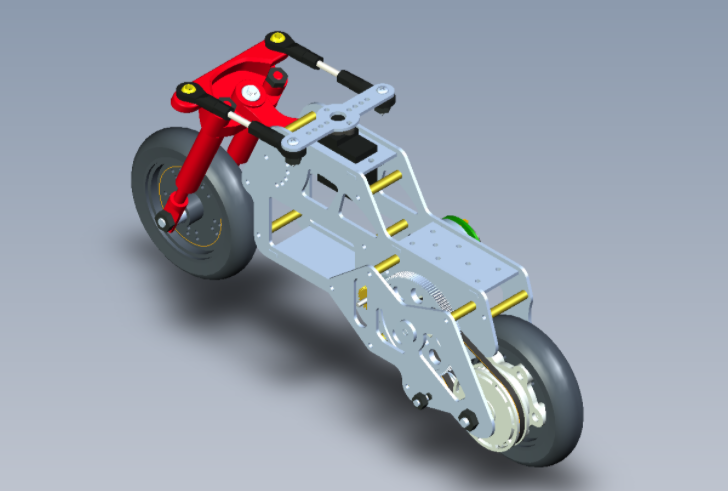
?6 .單車拉力組
(1)車模
車模使用K型車模,車模作品尺寸不限,車模上不允許安裝額外用于保持車模平衡的慣量輪,
(2)微控制器與傳感器
車模微控制器使用STC系列單片機,
允許使用電感、紅外光電、攝像頭傳感器、激光傳感器等,
(3)比賽賽道與任務
比賽沒有賽道,只有電磁線,但賽道元素包括有直道、彎道、坡道、十字路口,賽道一般鋪設在路面相對平整的室外運動場內,路面不會有顛簸路面和沙石路段,
比賽分為兩個階段:
- 預賽階段: 單車沿著賽道運行一周,按照比賽時間進行排名,
- 決賽階段: 決賽階段采用兩輛車對抗比賽模式,對抗的兩輛車模同時在賽道相對兩點同時發車,比賽最終堅持運行在賽道獲勝,或者最先跑完規定圈數獲勝,
參賽隊員在發車區一米范圍內輔助單車啟動,
▲ 單車輔助發車程序
?7 .專科基礎組
(1)車模
車模使用c型車模,也可以自行設計制作車模,車模作品尺寸不限,
(2)微控制器與傳感器
車模微控制器使用STC系列單片機,
允許使用各類電磁、紅外光電、激光、超聲傳感器器件進行賽道和環境檢測,但不允許使用攝像頭(包括線陣、面陣CCD),
(3)比賽賽道與任務
比賽是在PVC賽道上進行,賽道采用黑色邊線和電磁進行導引,
選手制作的車模完成從車庫觸發沿著賽道運行兩周,然后在回傳車庫,車模需要分別通過三岔路口兩條岔路,
比賽時間從車模駛出車庫到重新回到車庫為止,如果車模沒有能夠停止在車庫內停車區內,比賽時間加罰五秒鐘,
五、比賽組織

?1 .比賽階段
競賽分為分賽區(省賽區)和全國總決賽兩個階段,其中,全國總決賽階段在全國競賽組委會秘書處指導下,與決賽承辦學校共同成立競賽執行委員會,下轄技術組、裁判組和仲裁委員會,統一處理競賽程序中遇到的各類問題,
全國和分賽區(省賽區)競賽組織委員會作業人員,包括技術評判組、現場裁判組和仲裁組成員均不得在現場比賽期間參與任何針對個別參賽隊的指導或輔導作業,不得泄露任何有失公允競賽的資訊,在現場比賽的時候,組委會可以聘請參賽隊伍帶隊教師作為車模檢查監督人員,
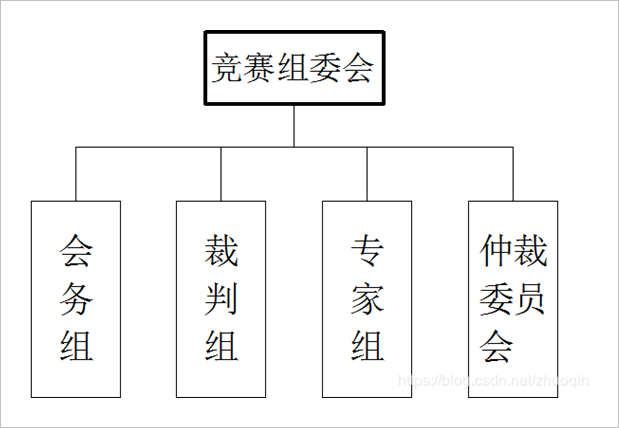
▲ 比賽職能機構
?2 .比賽流程
針對明年暑期舉行各分賽區、全國總決賽比賽程序中存在的一定不確定性因素,比賽流程在繼承以往比賽流程安排以及2020年暑期比賽簡化流程的基礎上,將會盡量簡化比賽流程安排,或者結合線上線下相結合的模式,具體比賽日程安排將會在2021年6月中旬公布,
分(省)賽區和總決賽的比賽規則相同,七個賽題組所遵循的比賽規則基本相同,但分別進行成績排名,
除了完成正常比賽之外,組委會還會在比賽期間增加相關的技術交流、組織參觀等活動,
?3 .比賽獎項
比賽將按照"分賽區普及、全國賽提高"的原則,在分賽區、省賽區每個組別分別按照相同的比例設定獎項,每個組別按照相同的隊伍選拔各分賽區隊伍參加全國總決賽,
(1)分賽區獎項設定
- 一等獎:分賽區參賽隊伍前20%隊伍,
- 二等獎:分賽區參賽隊伍35%,
- 三等獎:正常完成比賽但未獲得一、二等獎的隊伍,
- 優秀獎:未正常完成比賽,但通過補賽完成比賽的隊伍,
各分賽區可以根據比賽需要,修改和設定不同的獎項,并報大賽組委會審批,
(2)全國總決賽獎項設定
第十六屆全國總決賽獎項設定將在6月中旬另行發布,
?4 .組隊與報名辦法
(1)組隊規定
2021年暑期之前在校具有正式學籍的全日制本科、專科學生均可以參加比賽,每支參賽隊由本校3名學生(雙車組別可以有4名學生)組成,本校帶隊老師1-2名,每名學生只能參加一個組別競速比賽,
專科基礎組僅限于專科學生參加,
(2)報名辦法
智能車競賽網站:https://smartcar.cdstm.cn/index,
參賽隊通過競賽網站報名,詳細報名流程參見 《第十六屆全國大學智能汽車競賽參賽隊伍網路報名流程說明》,參賽隊伍可以按照大賽網站上公布的資訊聯系購買車模套件、單片機開發工具以及輔助教材,
六、其它

1、比賽程序中有其他作弊行為的,取消比賽成績;
2、參加預賽并晉級決賽的隊伍人員不允許改變;
3、參加全國總決賽的隊伍中的隊員最多只允許改變一名隊員;
4、本規則解釋權歸比賽組織委員會和競賽秘書處所有,
七、附件

?附錄1. 車模資訊
1. 車模供應商:北京科宇通博科技有限公司
(1)B型車模: 電機540,舵機:S-D5
▲ B型車模
(2)E型車模: 電機:RS-380
▲ E 型車模
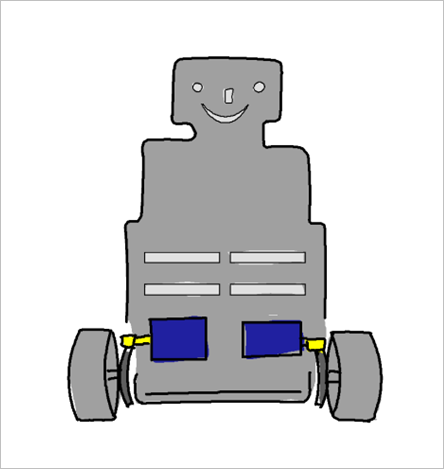
(3) H型車模 :電機RS-380
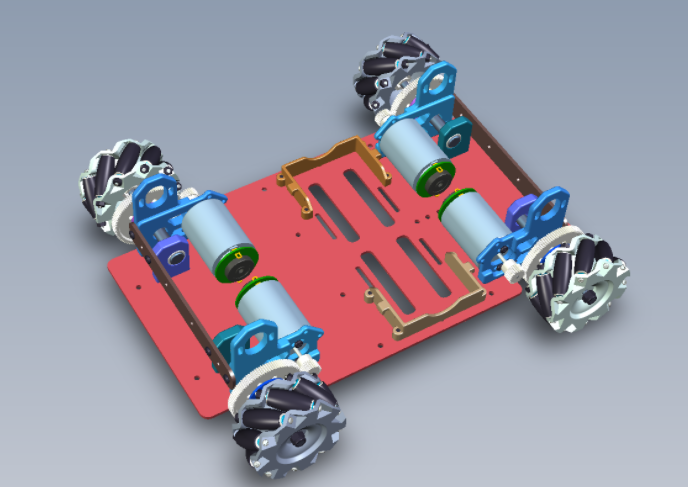
▲ H型車模
(4) K型車模 :電單車模型
▲ K型車模
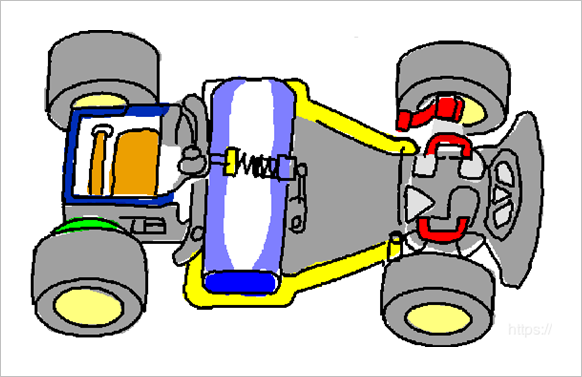
(5)L型車模:越野車模型

▲ L 型車模
2. 車模供應商:東莞市博思電子數碼科技有限公司
(1)C型車模:電機RS-380,舵機:FUTABA3010
▲ C型車模
(2)D型車模:電機 RS-380
▲ D 型車模
(3)F型車模:電機RS-380
▲ F型車模
注:D,E兩輪車模不允許增加第三輪改裝成三輪車參加雙車組的比賽,
?附錄2:車模修改要求
? 禁止不同型號車模之間互換電機、舵機和輪胎;
? 禁止改動車底盤結構、輪距、輪徑及輪胎;如有必要可以對于車模中的零部件進行適當刪減;
? 禁止采用其它型號的驅動電機,禁止改動驅動電機的傳動比;
? 禁止改造車模運動傳動結構;
? 禁止改動舵機模塊本身,但對于舵機的安裝方式,輸出軸的連接件沒有任何限制;
? 禁止改動驅動電機以及電池,車模前進動力必須來源于車模本身直流電機及電池;
? 禁止增加車模地面支撐裝置,在車模靜止、動態運行程序中,只允許車模原有四個車輪對車模起到支撐作用,對于電磁平衡組組,車模直立行走,在比賽程序中,只允許原有車模兩個后輪對車模起到支撐作用,
? 為了安裝電路、傳感器等,允許在底盤上打孔或安裝輔助支架等,
? 車輪:參賽車模的車輪需要是原車模配置的車輪和輪胎,不允許更改使用其它種類的車輪和輪胎,不允許增加車輪防滑膠套,
? 如果車輪損壞,則需要購買原車模提供商出售的車輪輪胎,
? 允許對于車輪輪胎做適當打磨,但要求原車輪輪胎花紋痕跡依然能夠分辨,不允許對于車輪胎進行雕刻花紋,
? 參賽隊伍的輪胎表面不允許有粘性物質,檢測標準如下:
車模在進入賽場之前,車模平放在地面A4列印紙上,端起車模后,A4列印紙不被粘連離開地面,檢查程序如下圖所示:
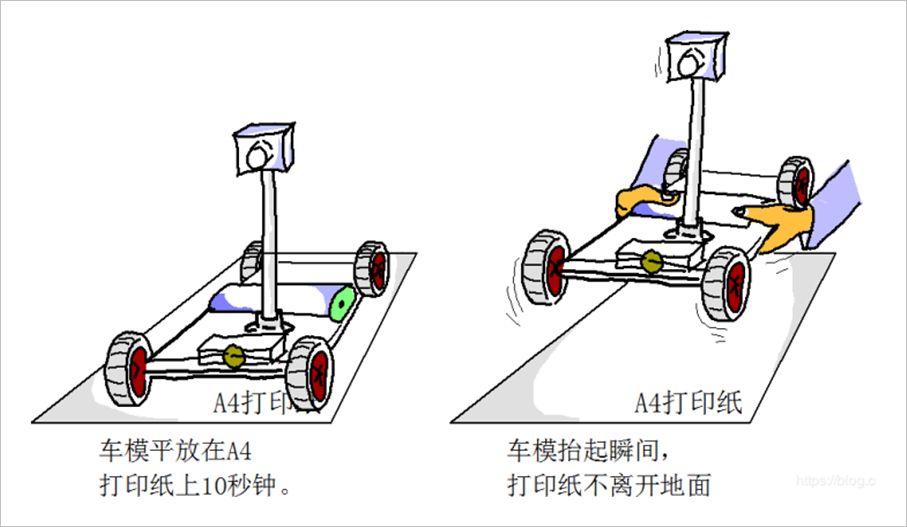
▲ 車模輪胎粘性檢查
?附錄3:賽車磁標
在比賽中新的計時系統采用的鋪設的線圈感應磁標進行計時,為了便于車模安裝,車模中可以采用以下幾類釹鐵硼永磁鐵,
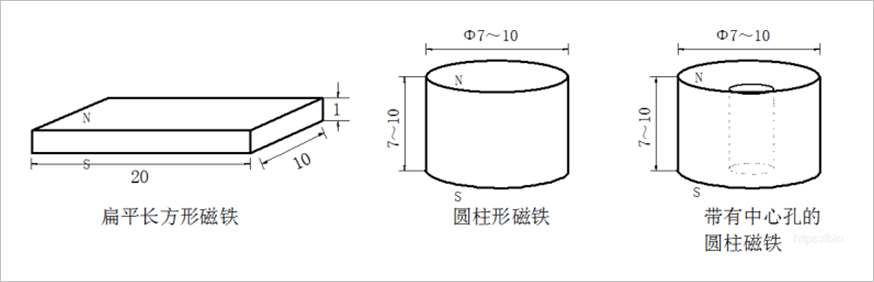
▲ 用作計時磁標的永磁鐵
第一類扁平的長方磁鐵便于直接使用膠水粘貼在車模底板,既牢靠,又距離地面近,便于觸發計時系統,推薦采用這類磁標,
第二類和第三類都屬于圓柱形的永磁鐵,只是第三類中帶有中間孔,方便利用螺絲固定在賽車底盤上,為了可靠觸發計時系統,這兩類的磁鐵的大小(高、直徑)應該在7至10毫米,太小不利于觸發計時系統,太高則不易于安裝,
為了可靠觸發計時系統,要求以上三種磁標安裝后距離賽道表面應小于2厘米,一種比較簡便的固定方式就是將上述永磁鐵吸附在車模電機的下面,
■ 相關文獻鏈接:
- 智能車競賽相關的教高司公函:公函[2005]201號文、教高司[2005]13號
- 第十五屆全國大學生智能汽車競賽競速賽規則(討論稿)
- 第十六屆智能車競賽討論稿件
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/229975.html
標籤:其他
上一篇:“具有NDK音視頻開發經驗者優先”,7/10的安卓招聘要求中都這樣寫,還不上手?
下一篇:ZZH的游戲