ROS小車記錄系列(七)樹莓派4b安裝ubuntu18.04,安裝melodic版ROS,主從機測驗小海龜
- 1、ubuntu18.04進樹莓派
- 2、給樹莓派安裝ros-melodic
- 3、主從控制樹莓派上小海龜
____之前系統都是在自己筆記本運行,現在需要上車了,在一眾熱心群友推薦下,昨天買了個樹莓派4b 8G版(主要是窮,買不起jetson…),中午到貨,下午火速安裝測驗下,
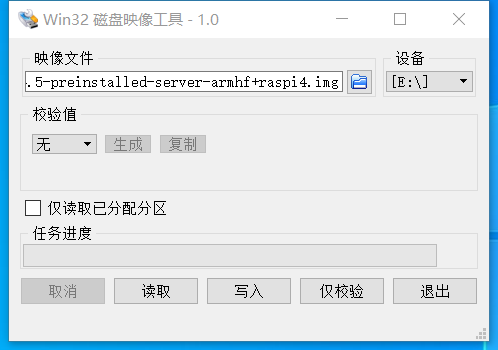
____按照慣例,先說準備, 硬體包括:樹莓派4b 8g、一張三星SD卡(128g)、讀卡器、一個散熱鐵殼子、HDMI轉micro HDMI資料線、5V電源、滑鼠鍵盤、一臺顯示幕(hdmi介面),軟體包括:系統燒錄工具 win32diskimager-1.0.0-install.exe,ubuntu18.04樹莓派版本系統 ubuntu-18.04.5-preinstalled-server-armhf+raspi4.img(下載后解壓出來),就這么多,沒有pytty,沒有winscp,
開始安裝:
1、ubuntu18.04進樹莓派
sd卡放入讀卡器,插進電腦,打開win32diskimager-1.0.0-install,選取ubuntu-18.04.5-preinstalled-server-armhf+raspi4.img,選取sd卡,點擊寫入,一會就完成,
拔下SD卡,插入樹莓派,樹莓派的micro hdmi通過視頻線,連接顯示屏hdmi口,滑鼠鍵盤該插的插,上電,系統啟動后,輸入初始用戶名ubuntu、密碼ubuntu,然后會要求更改密碼,輸入兩遍,完成,
樹莓派網口網線連上一個路由,讓樹莓派能上網,
為系統換源:
sudo vim /etc/apt/sources.list
我更換的阿里云,內容全部替換為:
deb https://mirrors.aliyun.com/ubuntu-ports/ disco main restricted universe multiverse
deb-src https://mirrors.aliyun.com/ubuntu-ports/ disco main restricted universe multiverse
deb https://mirrors.aliyun.com/ubuntu-ports/ disco-security main restricted universe multiverse
deb-src https://mirrors.aliyun.com/ubuntu-ports/ disco-security main restricted universe multiverse
deb https://mirrors.aliyun.com/ubuntu-ports/ disco-updates main restricted universe multiverse
deb-src https://mirrors.aliyun.com/ubuntu-ports/ disco-updates main restricted universe multiverse
deb https://mirrors.aliyun.com/ubuntu-ports/ disco-backports main restricted universe multiverse
deb-src https://mirrors.aliyun.com/ubuntu-ports/ disco-backports main restricted universe multiverse
deb https://mirrors.aliyun.com/ubuntu-ports/ disco-proposed main restricted universe multiverse
deb-src https://mirrors.aliyun.com/ubuntu-ports/ disco-proposed main restricted universe multiverse
更新下系統
sudo apt update
安裝桌面環境
sudo apt-get install ubuntu-desktop
比較快,半小時左右吧,完成后reboot,就進入桌面環境,這里就比較好設定連接wifi,
2、給樹莓派安裝ros-melodic
這個我就不細說,直接列下指令,(本人熟練安裝各版本ros,5元/次,哈)
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
sudo apt-get update
sudo apt-get install ros-melodic-desktop-full
sudo rosdep init
最后一條可能會報錯,
ERROR: cannot download default sources list from:
https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/sources.list.d/20-default.list
Website may be down,
按下面處理:
cd /etc
sudo gedit hosts
在檔案末尾添加:
151.101.84.133 raw.githubusercontent.com
保存后再次執行sudo rosdep init,成功,繼續安裝ros:
rosdep update
sudo apt install rospack-tools
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc
sudo apt install python-rosinstall python-rosinstall-generator python-wstool build-essential
到這,安裝完成,roscore測驗下,順利打開,
3、主從控制樹莓派上小海龜
需要:樹莓派、一臺遠程電腦、wifi,固定樹莓派和筆記本為同一個網段,我的樹莓派ip:192.168.1.232,筆記本ip:192.168.1.64,二者相互ping的通,
樹莓派終端:
sudo gedit ~/.bashrc
輸入:
export ROS_MASTER_URI=192.168.1.232:11311
export ROS_HOSTNAME=192.168.1.232
保存退出,更新:
source ~/.bashrc
筆記本終端:
sudo gedit ~/.bashrc
輸入:
export ROS_MASTER_URI=192.168.1.232:11311
export ROS_HOSTNAME=192.168.1.64
保存退出,更新:
source ~/.bashrc
好了,到這配置完成了,從樹莓派啟動roscore、啟動小海龜節點rosrun turtlesim turtlesim_node,從筆記本端啟動鍵盤節點rosrun turtlesim turtle_teleop_key,現在筆記本端鍵盤,就能控制樹莓派上小海龜運動了,
沒用過樹莓派,今天先測驗下流程安裝,明天開始把完整系統復制上來,
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/229980.html
標籤:其他
上一篇:初識Java語言——一起加油