單片機ADC采樣演算法 之 卡爾曼濾波
演算法的核心思想是,根據當前的儀器"測量值" 和上一刻的 “預測量” 和 “誤差”,計算得到當前的最優量.
再預測下一刻的量, 里面比較突出的是觀點是. 把誤差納入計算, 而且分為預測誤差和測量誤差兩種.通稱為 噪聲. 還有一個非常大的特點是,誤差獨立存在, 始終不受測量資料的影響,
下來先了解一個卡爾曼濾波中幾個引數的含義:概率(Probability),隨即變數(Random Variable),高斯或正態分配(Gaussian Distribution)還有State-space Model等等,
關于卡爾曼公式的含義及推導,網上已經有很多文章了,這里不在贅述,直接看C代碼的實作,
/*
R值固定,Q值越大,代表越信任測量值,Q值無窮大,代表只用測量值,
Q值越小,代表越信任模型預測值,Q值為0,代表只用模型預測值,
*/
//引數一
float KalmanFilter( float inData )
{
static float prevData = 0; //上一個資料
static float p = 10, q = 0.001, r = 0.001, kGain = 0; // q 控制誤差 r 控制回應速度
p = p + q;
kGain = p / ( p + r ); //計算卡爾曼增益
inData = prevData + ( kGain * ( inData - prevData ) ); //計算本次濾波估計值
p = ( 1 - kGain ) * p; //更新測量方差
prevData = inData;
return inData; //回傳估計值
}
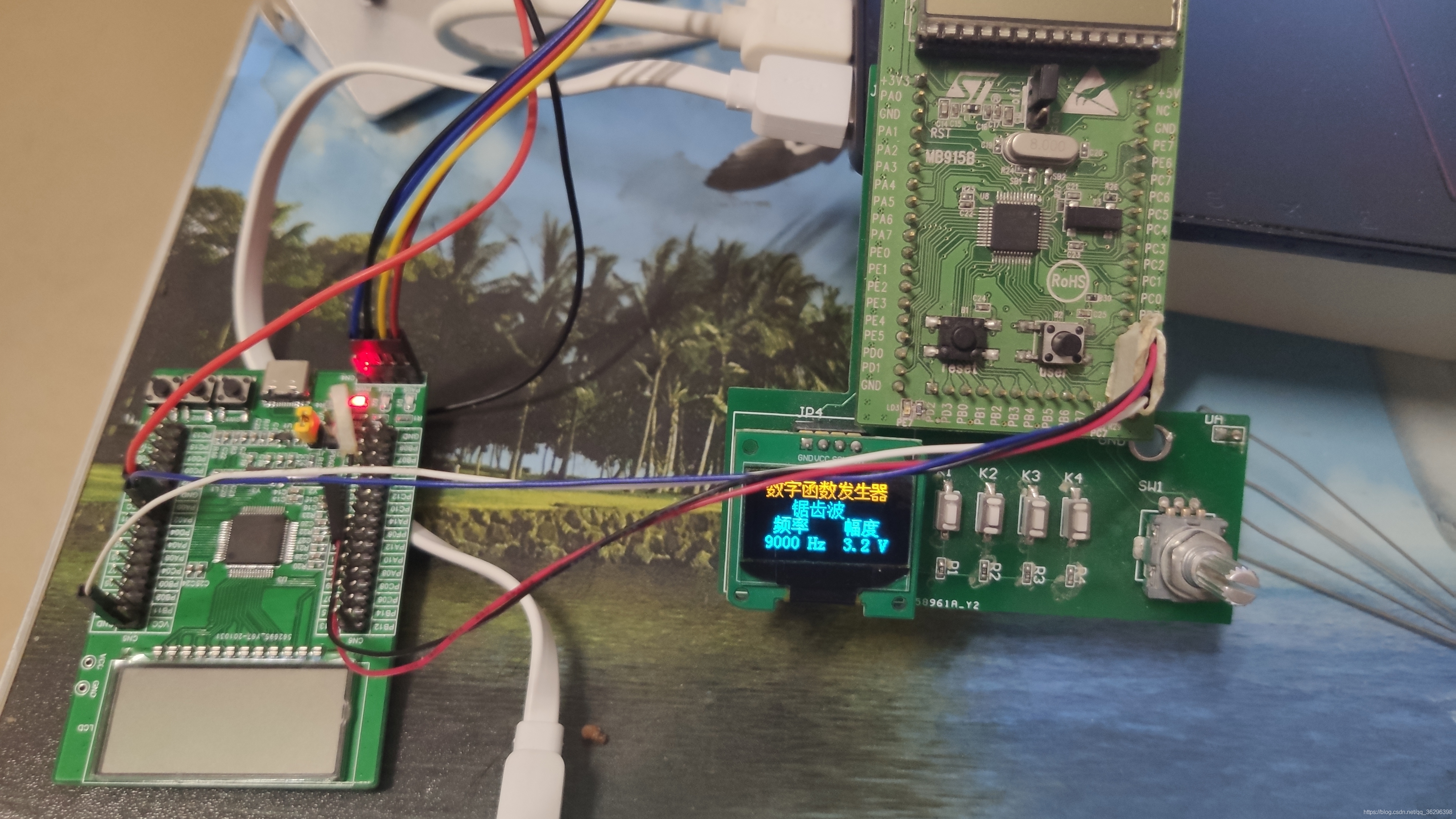
現在測驗一下卡爾曼濾波的效果,通過函式發生器產生一個鋸齒波,送到單片機的AD口,單片機讀取采集到的AD資料后,經過卡爾曼濾波演算法,然后將采樣的資料和濾波后的資料通過串口發生出來,并在串口波形顯示軟體上顯示,
void main( void )
{
while( 1 )
{
val1 = ReadVol_CH3(); //讀取AD采樣資料
dat = ( float )val1;
dat = KalmanFilter( dat ); //卡爾曼濾波
printf("A%drn",val1); //列印結果
printf("B%2frn",dat);
}
}
現在看一下濾波的結果
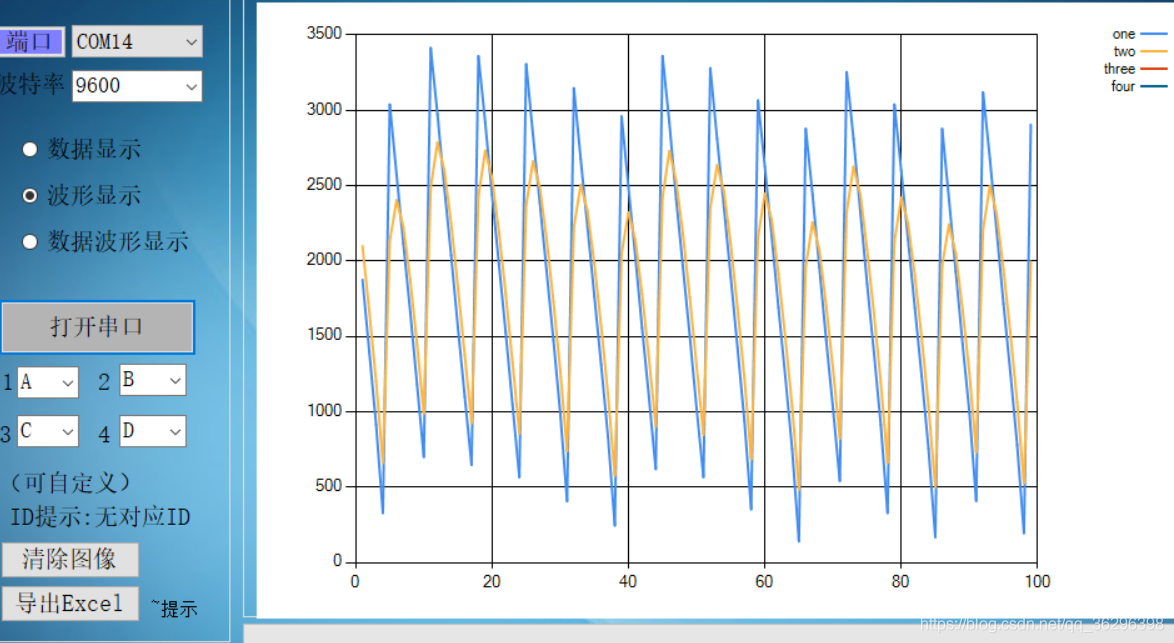
藍色曲線為原始采樣的資料曲線,橙色曲線為經過卡爾曼濾波后的曲線,
下面改變Q和R的值在測驗一下濾波效果,
修改后的引數如下
//引數二
unsigned long kalman_filter( unsigned long ADC_Value )
{
float LastData;
float NowData;
float kalman_adc;
static float kalman_adc_old = 0;
static float P1;
static float Q = 0.0003;
static float R = 5;
static float Kg = 0;
static float P = 1;
NowData = ADC_Value;
LastData = kalman_adc_old;
P = P1 + Q;
Kg = P / ( P + R );
kalman_adc = LastData + Kg * ( NowData - kalman_adc_old );
P1 = ( 1 - Kg ) * P;
P = P1;
kalman_adc_old = kalman_adc;
return ( unsigned long )( kalman_adc );
}
測驗波形
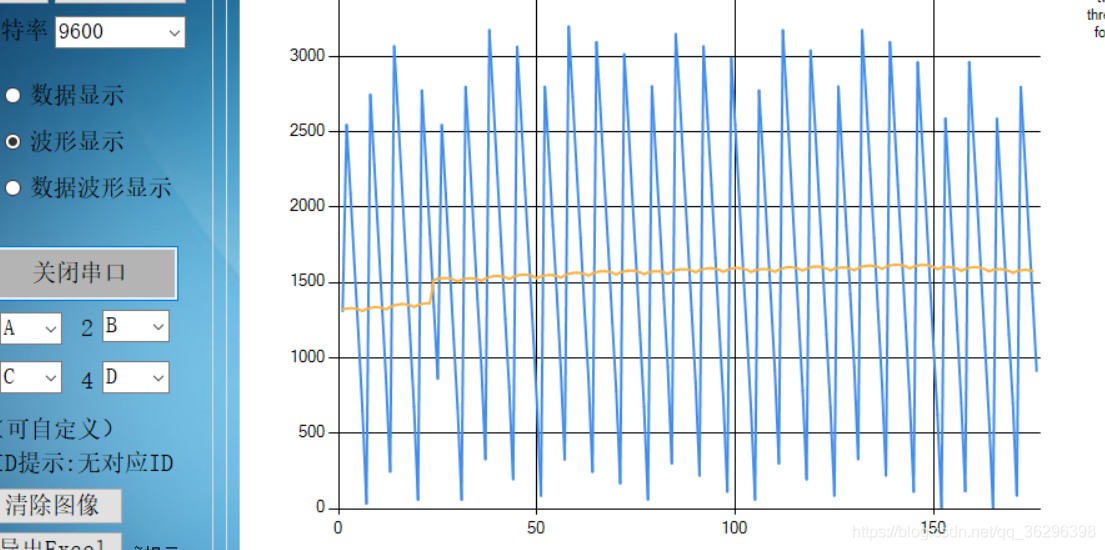
藍色曲線為原始采樣的資料曲線,橙色曲線為經過卡爾曼濾波后的曲線,
和第一次測驗的波形圖對比后可以發現,第二次經過卡爾曼濾波后的波形變化非常大,引數改變后鋸齒波被濾成接近于直線了,
可以看到不同的R、Q值會對測量結果有很大的影響,
Q:程序噪聲,Q增大,動態回應變快,收斂穩定性變壞
R:測量噪聲,R增大,動態回應變慢,收斂穩定性變好
具體各個引數的如何選擇,只有在應用中根據測量結果,自己慢慢調整,
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/231077.html
標籤:其他