5電感穩定姿態進環島
- 寫在前面
- 流程圖
- 圖示
- 代碼講解
寫在前面
我寫了一篇總的博客,分享了我參加了十五屆智能車競賽的經歷哦~
2020第十五屆全國大學生智能汽車競賽——基礎四輪組入門看這一篇就夠了!
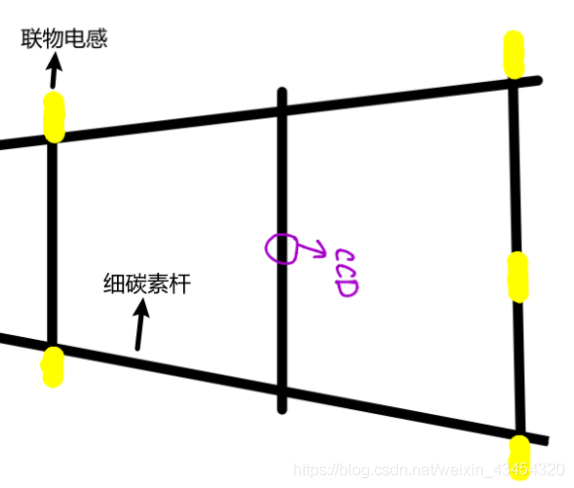
我采用的電感擺放方式是這樣的,5個電感均采用橫電感的擺放方式
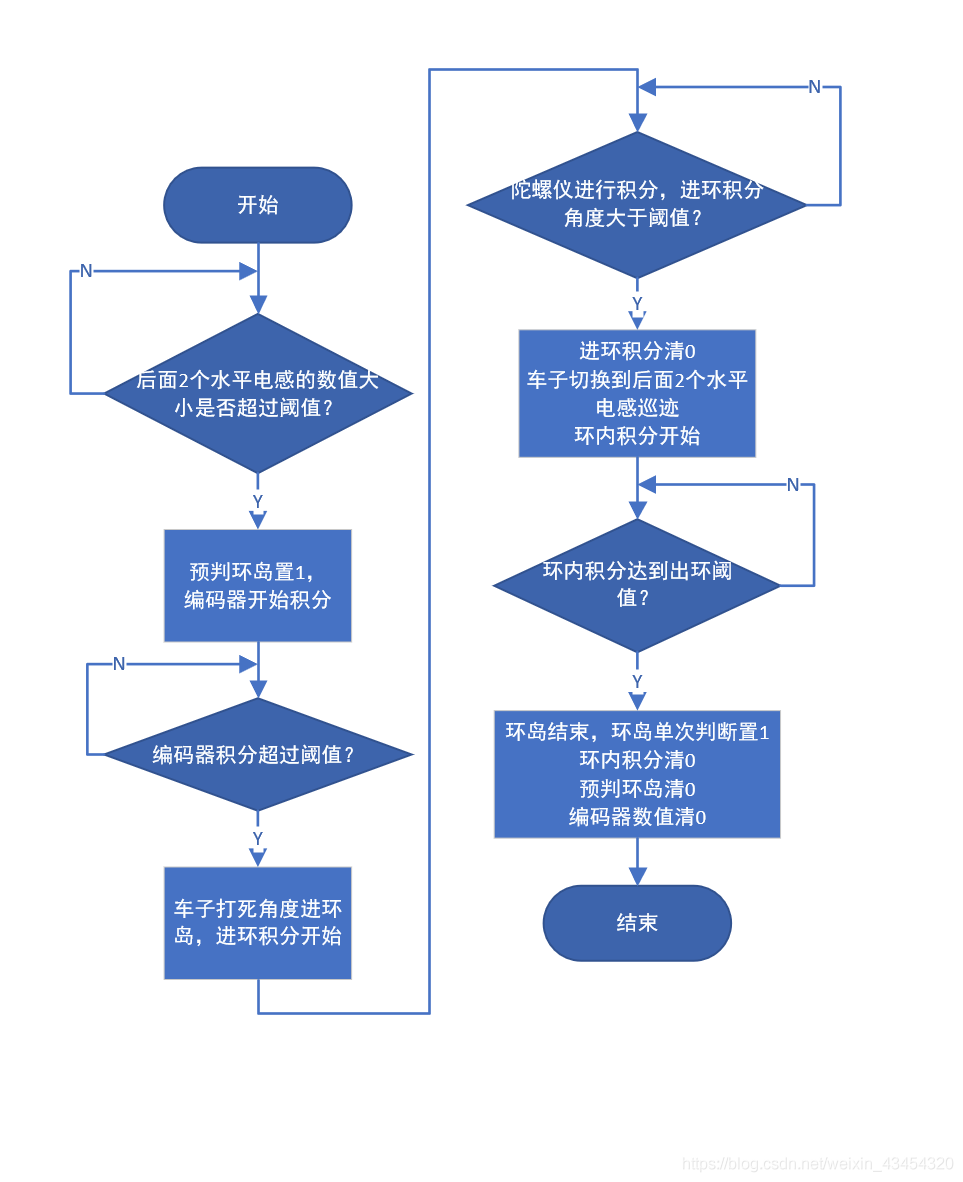
流程圖
圖示
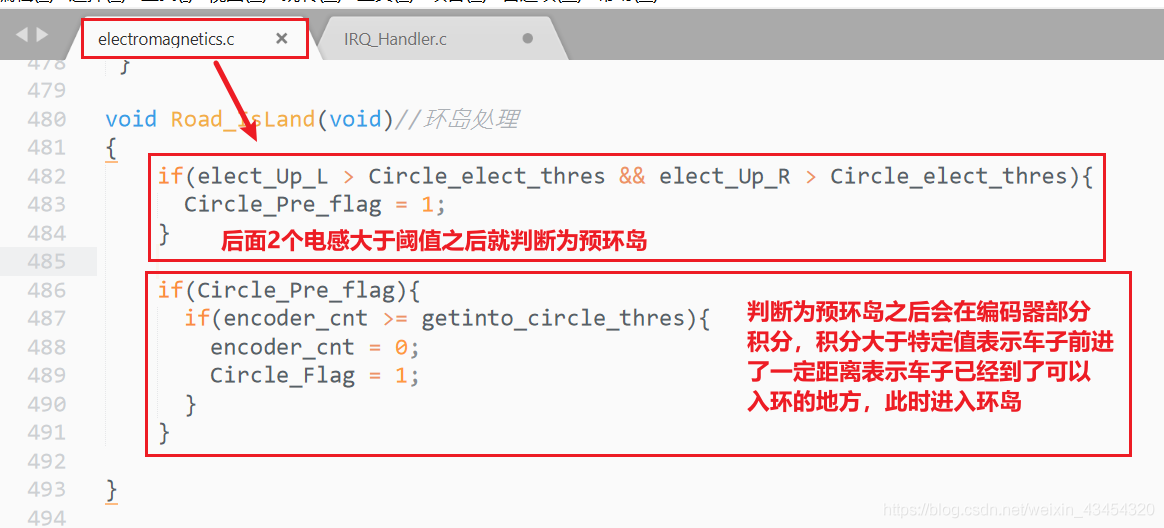
代碼講解
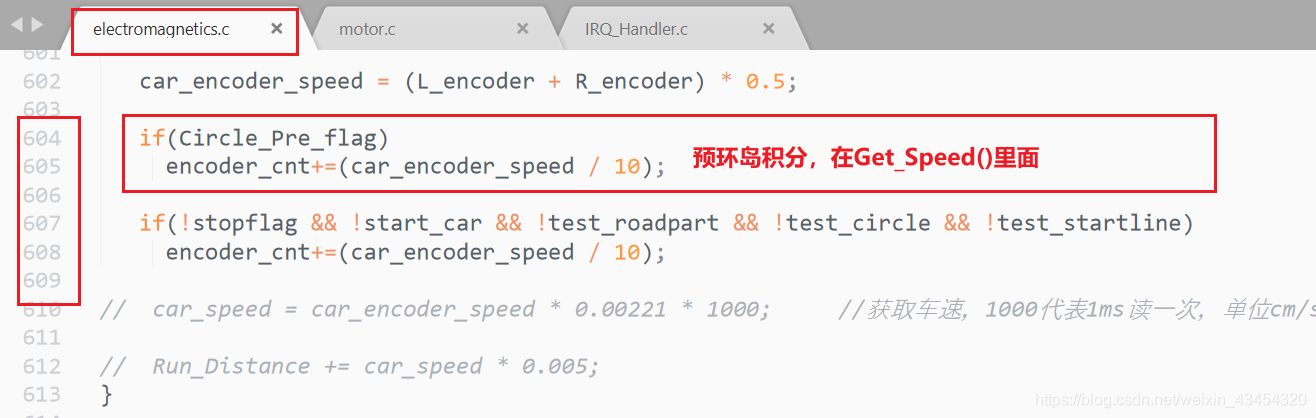
環島處理在這個檔案夾下面,單看這個函式環島處理就有些簡單了,結合流程圖來看,其實還有編碼器積分,陀螺儀積分的部分哦
首先是后面 2個橫電感 的數值大于一定閾值才會判斷為預環島
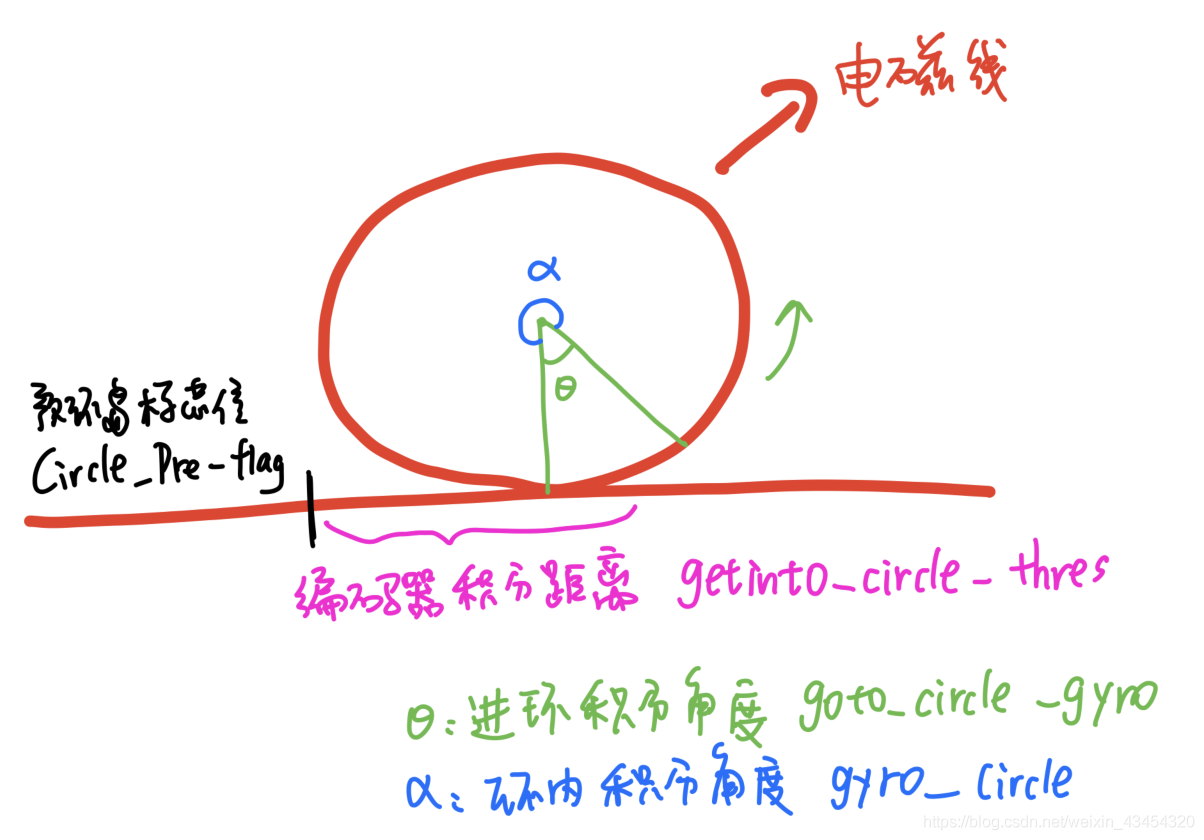
預環島后會積分一段距離直到適當的入環位置
入環編碼器積分
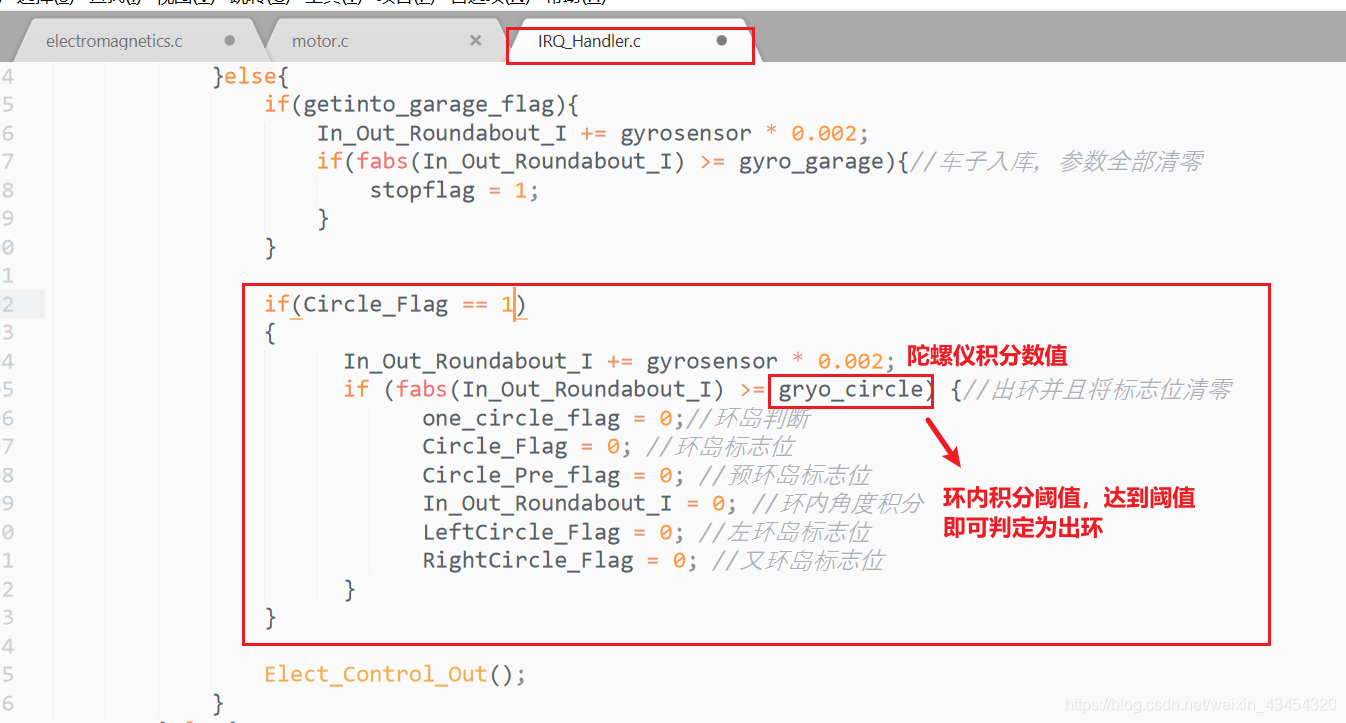
進環陀螺儀積分

環內角度積分
一鍵三連,這次一定~

轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/238631.html
標籤:其他
上一篇:鏈表的中間結點20201221