stm32f103指南者oled顯示
- 1.顯示自己的學號和姓名;
- 2.顯示AHT20的溫度和濕度;
- 3.上下的滑動顯示長字符
- 總結
1.顯示自己的學號和姓名;
1、SPI協議介面:
SPI協議,即串行外圍設備介面,是一種高速全雙工的通信總線,
在OLED官網下載例程: http://www.lcdwiki.com/zh/0.96inch_SPI_OLED_Module
 2、打開“0.96inch_OLED_Demo_STM32F103ZET6_Hardware_4-wire_SPI檔案夾中的例程”,
2、打開“0.96inch_OLED_Demo_STM32F103ZET6_Hardware_4-wire_SPI檔案夾中的例程”,
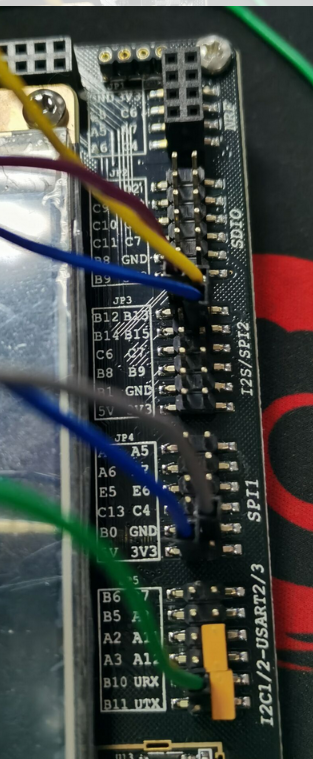
 3、按照main.c檔案中的注釋連接OLED和stm32
3、按照main.c檔案中的注釋連接OLED和stm32
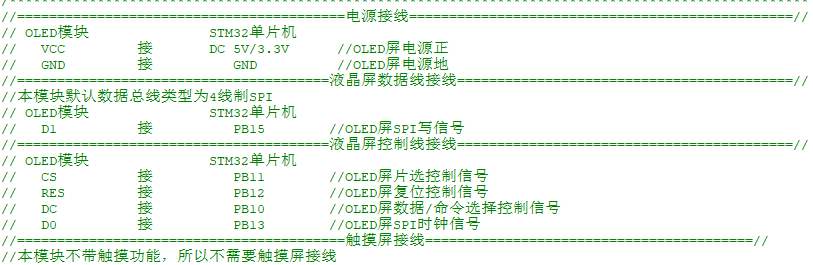
 CS介面不用連接,
CS介面不用連接,
4、使用PCtoLCD2002撰寫字模,
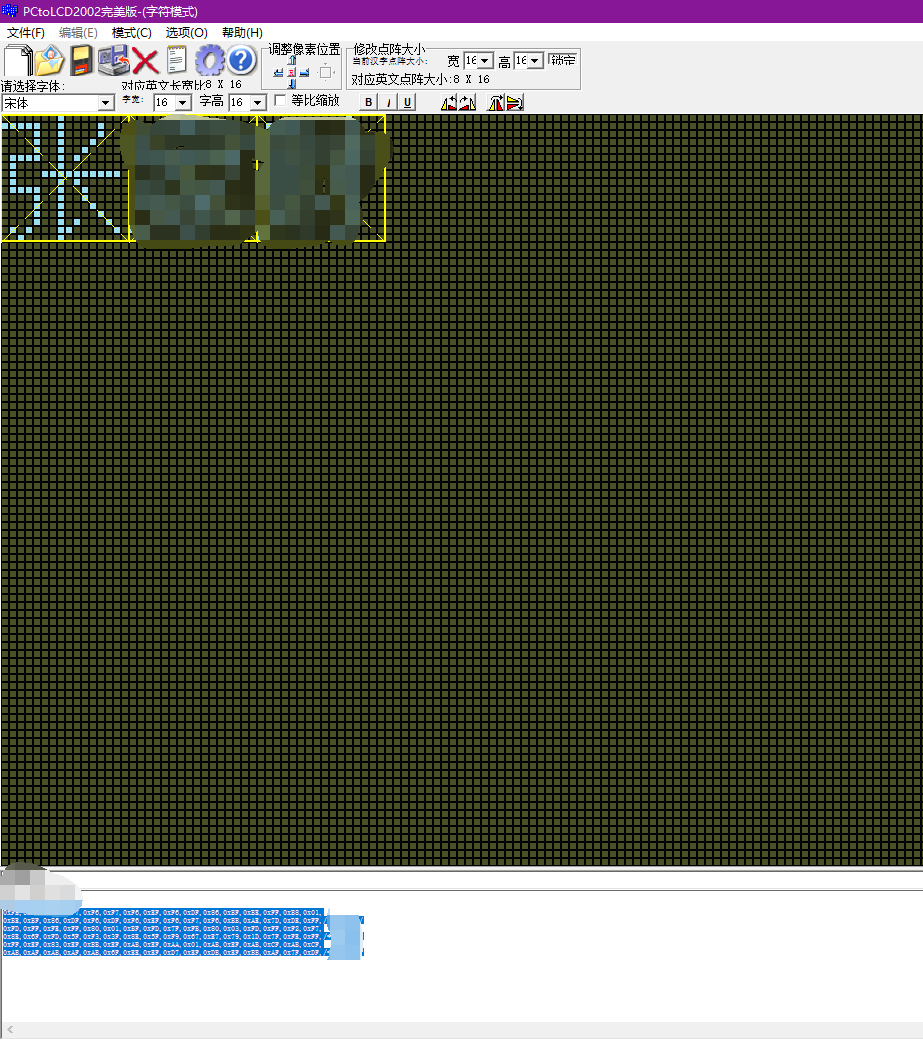 5、將字模代碼粘貼到oledfront.h中
5、將字模代碼粘貼到oledfront.h中
 6.進入test.c,修改TEST_MainPage函式如下
6.進入test.c,修改TEST_MainPage函式如下
void TEST_MainPage(void)
{
GUI_ShowString(20,0,"631807030xxx",8,1);
GUI_ShowCHinese(16,20,16,"張家財",1);
delay_ms(1500);
}
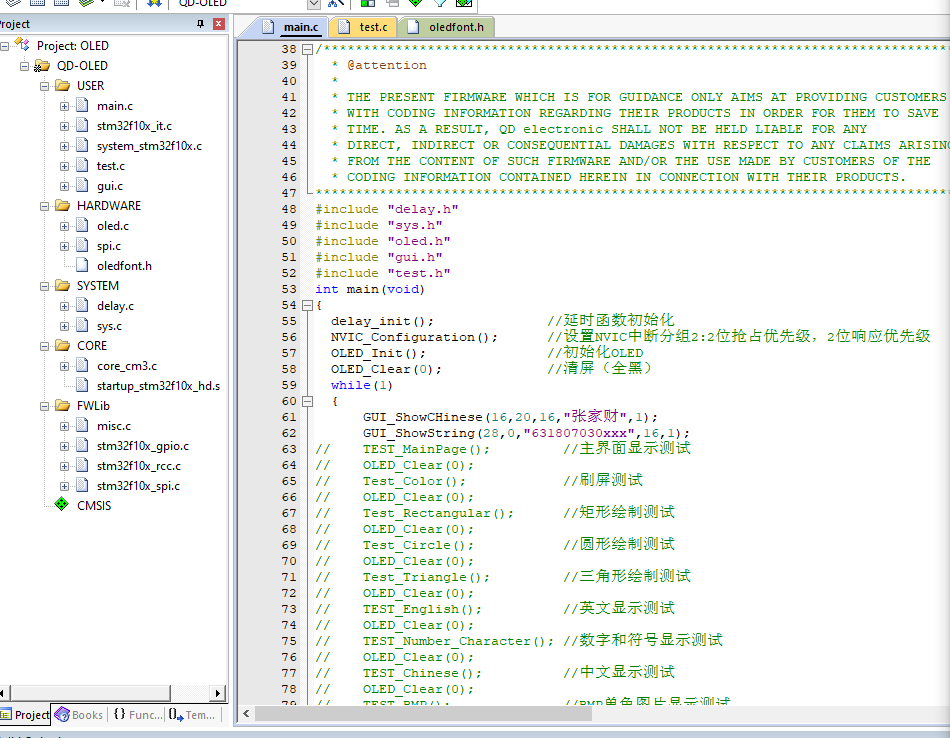 7、修改main.c如下
7、修改main.c如下
#include "delay.h"
#include "sys.h"
#include "oled.h"
#include "gui.h"
#include "test.h"
int main(void)
{
delay_init(); //延時函式初始化
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //設定NVIc中斷分組2:2位搶占優先級,2位回應優先級
OLED_Init(); //初始化OLED
OLED_Clear(0); //清屏,全黑
while(1)
{
TEST_MainPage(); //主頁面顯示姓名與學號
OLED_Clear(0);
}
}
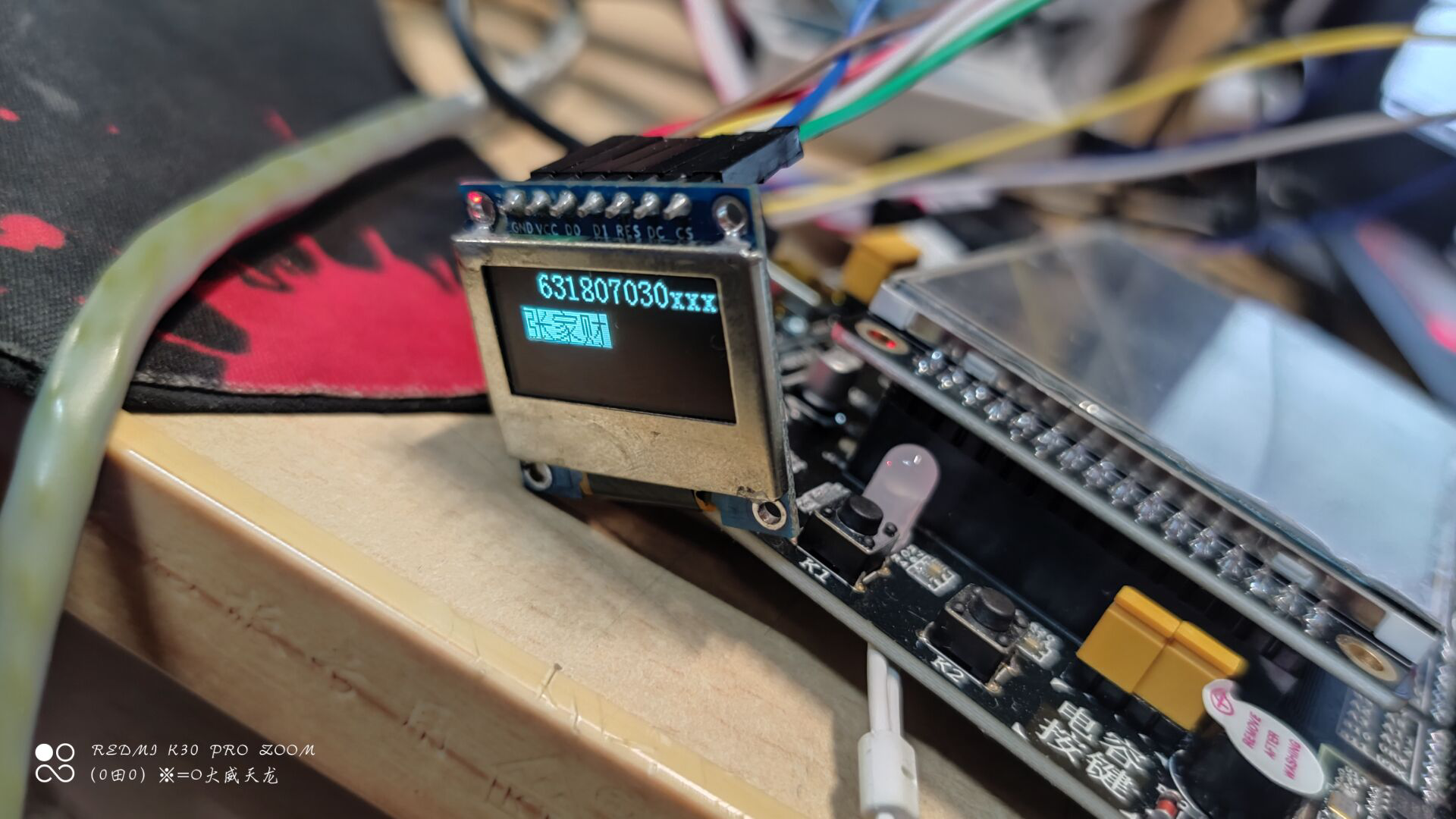
8、編譯并燒錄程式到stm32中,可看見OLED顯示了姓名和學號,
2.顯示AHT20的溫度和濕度;
1、在USER目錄下加入bsp_i2c.c,bsp_i2c.h,usart.c,usart.h幾個檔案,代碼分別如下,

bsp_i2c.c
#include "bsp_i2c.h"
#include "delay.h"
uint8_t ack_status=0;
uint8_t readByte[6];
uint8_t AHT20_status=0;
uint32_t H1=0; //Humility
uint32_t T1=0; //Temperature
uint8_t AHT20_OutData[4];
uint8_t AHT20sendOutData[10] = {0xFA, 0x06, 0x0A, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0xFF};
void IIC_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOB, ENABLE );
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6|GPIO_Pin_7;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP ; //í?íìê?3?
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
IIC_SCL=1;
IIC_SDA=1;
}
//2úéúIIC?eê?D?o?
void IIC_Start(void)
{
SDA_OUT(); //sda??ê?3?
IIC_SDA=1;
IIC_SCL=1;
delay_us(4);
IIC_SDA=0;//START:when CLK is high,DATA change form high to low
delay_us(4);
IIC_SCL=0;//?ˉ×?I2C×ü??£?×?±?·¢?í?ò?óê?êy?Y
}
//2úéúIICí£?1D?o?
void IIC_Stop(void)
{
SDA_OUT();//sda??ê?3?
IIC_SCL=0;
IIC_SDA=0;//STOP:when CLK is high DATA change form low to high
delay_us(4);
IIC_SCL=1;
IIC_SDA=1;//·¢?íI2C×ü???áê?D?o?
delay_us(4);
}
//μè′yó|′eD?o?μ?à′
//·μ???μ£o1£??óê?ó|′e꧰ü
// 0£??óê?ó|′e3é1|
u8 IIC_Wait_Ack(void)
{
u8 ucErrTime=0;
SDA_IN(); //SDAéè???aê?è?
IIC_SDA=1;delay_us(1);
IIC_SCL=1;delay_us(1);
while(READ_SDA)
{
ucErrTime++;
if(ucErrTime>250)
{
IIC_Stop();
return 1;
}
}
IIC_SCL=0;//ê±?óê?3?0
return 0;
}
//2úéúACKó|′e
void IIC_Ack(void)
{
IIC_SCL=0;
SDA_OUT();
IIC_SDA=0;
delay_us(2);
IIC_SCL=1;
delay_us(2);
IIC_SCL=0;
}
//2?2úéúACKó|′e
void IIC_NAck(void)
{
IIC_SCL=0;
SDA_OUT();
IIC_SDA=1;
delay_us(2);
IIC_SCL=1;
delay_us(2);
IIC_SCL=0;
}
//IIC·¢?íò???×??ú
//·μ??′ó?úóD?Tó|′e
//1£?óDó|′e
//0£??Tó|′e
void IIC_Send_Byte(u8 txd)
{
u8 t;
SDA_OUT();
IIC_SCL=0;//à-μíê±?ó?aê?êy?Y′?ê?
for(t=0;t<8;t++)
{
IIC_SDA=(txd&0x80)>>7;
txd<<=1;
delay_us(2); //??TEA5767?aèy???óê±??ê?±?D?μ?
IIC_SCL=1;
delay_us(2);
IIC_SCL=0;
delay_us(2);
}
}
//?á1??×??ú£?ack=1ê±£?·¢?íACK£?ack=0£?·¢?ínACK
u8 IIC_Read_Byte(unsigned char ack)
{
unsigned char i,receive=0;
SDA_IN();//SDAéè???aê?è?
for(i=0;i<8;i++ )
{
IIC_SCL=0;
delay_us(2);
IIC_SCL=1;
receive<<=1;
if(READ_SDA)receive++;
delay_us(1);
}
if (!ack)
IIC_NAck();//·¢?ínACK
else
IIC_Ack(); //·¢?íACK
return receive;
}
void IIC_WriteByte(uint16_t addr,uint8_t data,uint8_t device_addr)
{
IIC_Start();
if(device_addr==0xA0) //eepromμ??·′óóú1×??ú
IIC_Send_Byte(0xA0 + ((addr/256)<<1));//·¢?í??μ??·
else
IIC_Send_Byte(device_addr); //·¢?÷?tμ??·
IIC_Wait_Ack();
IIC_Send_Byte(addr&0xFF); //·¢?íμíμ??·
IIC_Wait_Ack();
IIC_Send_Byte(data); //·¢?í×??ú
IIC_Wait_Ack();
IIC_Stop();//2úéúò???í£?1ì??t
if(device_addr==0xA0) //
delay_ms(10);
else
delay_us(2);
}
uint16_t IIC_ReadByte(uint16_t addr,uint8_t device_addr,uint8_t ByteNumToRead) //?á??′??÷?ò?áêy?Y
{
uint16_t data;
IIC_Start();
if(device_addr==0xA0)
IIC_Send_Byte(0xA0 + ((addr/256)<<1));
else
IIC_Send_Byte(device_addr);
IIC_Wait_Ack();
IIC_Send_Byte(addr&0xFF); //·¢?íμíμ??·
IIC_Wait_Ack();
IIC_Start();
IIC_Send_Byte(device_addr+1); //·¢?÷?tμ??·
IIC_Wait_Ack();
if(ByteNumToRead == 1)//LM75???èêy?Y?a11bit
{
data=IIC_Read_Byte(0);
}
else
{
data=IIC_Read_Byte(1);
data=(data<<8)+IIC_Read_Byte(0);
}
IIC_Stop();//2úéúò???í£?1ì??t
return data;
}
/**********
*é???2?·??aIO?ú?£?éI2C????
*
*′ó?aò????aê??aAHT20μ?????I2C
*oˉêy??óDIICoíI2Cμ???±e£???×¢òa£?£?£?£?£?
*
*2020/2/23×?oóDT??è??ú
*
***********/
void read_AHT20_once(int *T,int *H)
{
delay_ms(10);
reset_AHT20();
delay_ms(10);
init_AHT20();
delay_ms(10);
startMeasure_AHT20();
delay_ms(80);
read_AHT20(T,H);
delay_ms(5);
}
void reset_AHT20(void)
{
I2C_Start();
I2C_WriteByte(0x70);
ack_status = Receive_ACK();
if(ack_status) printf("1");
else printf("1-n-");
I2C_WriteByte(0xBA);
ack_status = Receive_ACK();
if(ack_status) printf("2");
else printf("2-n-");
I2C_Stop();
/*
AHT20_OutData[0] = 0;
AHT20_OutData[1] = 0;
AHT20_OutData[2] = 0;
AHT20_OutData[3] = 0;
*/
}
void init_AHT20(void)
{
I2C_Start();
I2C_WriteByte(0x70);
ack_status = Receive_ACK();
if(ack_status) printf("3");
else printf("3-n-");
I2C_WriteByte(0xE1);
ack_status = Receive_ACK();
if(ack_status) printf("4");
else printf("4-n-");
I2C_WriteByte(0x08);
ack_status = Receive_ACK();
if(ack_status) printf("5");
else printf("5-n-");
I2C_WriteByte(0x00);
ack_status = Receive_ACK();
if(ack_status) printf("6");
else printf("6-n-");
I2C_Stop();
}
void startMeasure_AHT20(void)
{
//------------
I2C_Start();
I2C_WriteByte(0x70);
ack_status = Receive_ACK();
if(ack_status) printf("7");
else printf("7-n-");
I2C_WriteByte(0xAC);
ack_status = Receive_ACK();
if(ack_status) printf("8");
else printf("8-n-");
I2C_WriteByte(0x33);
ack_status = Receive_ACK();
if(ack_status) printf("9");
else printf("9-n-");
I2C_WriteByte(0x00);
ack_status = Receive_ACK();
if(ack_status) printf("10");
else printf("10-n-");
I2C_Stop();
}
void read_AHT20(int *T,int *H)
{
uint8_t i;
for(i=0; i<6; i++)
{
readByte[i]=0;
}
//-------------
I2C_Start();
I2C_WriteByte(0x71);
ack_status = Receive_ACK();
readByte[0]= I2C_ReadByte();
Send_ACK();
readByte[1]= I2C_ReadByte();
Send_ACK();
readByte[2]= I2C_ReadByte();
Send_ACK();
readByte[3]= I2C_ReadByte();
Send_ACK();
readByte[4]= I2C_ReadByte();
Send_ACK();
readByte[5]= I2C_ReadByte();
SendNot_Ack();
//Send_ACK();
I2C_Stop();
//--------------
if( (readByte[0] & 0x68) == 0x08 )
{
H1 = readByte[1];
H1 = (H1<<8) | readByte[2];
H1 = (H1<<8) | readByte[3];
H1 = H1>>4;
H1 = (H1*1000)/1024/1024;
T1 = readByte[3];
T1 = T1 & 0x0000000F;
T1 = (T1<<8) | readByte[4];
T1 = (T1<<8) | readByte[5];
T1 = (T1*2000)/1024/1024 - 500;
AHT20_OutData[0] = (H1>>8) & 0x000000FF;
AHT20_OutData[1] = H1 & 0x000000FF;
AHT20_OutData[2] = (T1>>8) & 0x000000FF;
AHT20_OutData[3] = T1 & 0x000000FF;
}
else
{
AHT20_OutData[0] = 0xFF;
AHT20_OutData[1] = 0xFF;
AHT20_OutData[2] = 0xFF;
AHT20_OutData[3] = 0xFF;
printf("꧰üá?");
}
printf("\r\n");
printf("???è:%d%d.%d",T1/100,(T1/10)%10,T1%10);
printf("êa?è:%d%d.%d",H1/100,(H1/10)%10,H1%10);
printf("\r\n");
*T=T1;
*H=H1;
}
uint8_t Receive_ACK(void)
{
uint8_t result=0;
uint8_t cnt=0;
IIC_SCL = 0;
SDA_IN();
delay_us(4);
IIC_SCL = 1;
delay_us(4);
while(READ_SDA && (cnt<100))
{
cnt++;
}
IIC_SCL = 0;
delay_us(4);
if(cnt<100)
{
result=1;
}
return result;
}
void Send_ACK(void)
{
SDA_OUT();
IIC_SCL = 0;
delay_us(4);
IIC_SDA = 0;
delay_us(4);
IIC_SCL = 1;
delay_us(4);
IIC_SCL = 0;
delay_us(4);
SDA_IN();
}
void SendNot_Ack(void)
{
SDA_OUT();
IIC_SCL = 0;
delay_us(4);
IIC_SDA = 1;
delay_us(4);
IIC_SCL = 1;
delay_us(4);
IIC_SCL = 0;
delay_us(4);
IIC_SDA = 0;
delay_us(4);
}
void I2C_WriteByte(uint8_t input)
{
uint8_t i;
SDA_OUT();
for(i=0; i<8; i++)
{
IIC_SCL = 0;
delay_ms(5);
if(input & 0x80)
{
IIC_SDA = 1;
//delaymm(10);
}
else
{
IIC_SDA = 0;
//delaymm(10);
}
IIC_SCL = 1;
delay_ms(5);
input = (input<<1);
}
IIC_SCL = 0;
delay_us(4);
SDA_IN();
delay_us(4);
}
uint8_t I2C_ReadByte(void)
{
uint8_t resultByte=0;
uint8_t i=0, a=0;
IIC_SCL = 0;
SDA_IN();
delay_ms(4);
for(i=0; i<8; i++)
{
IIC_SCL = 1;
delay_ms(3);
a=0;
if(READ_SDA)
{
a=1;
}
else
{
a=0;
}
//resultByte = resultByte | a;
resultByte = (resultByte << 1) | a;
IIC_SCL = 0;
delay_ms(3);
}
SDA_IN();
delay_ms(10);
return resultByte;
}
void set_AHT20sendOutData(void)
{
/* --------------------------
* 0xFA 0x06 0x0A temperature(2 Bytes) humility(2Bytes) short Address(2 Bytes)
* And Check (1 byte)
* -------------------------*/
AHT20sendOutData[3] = AHT20_OutData[0];
AHT20sendOutData[4] = AHT20_OutData[1];
AHT20sendOutData[5] = AHT20_OutData[2];
AHT20sendOutData[6] = AHT20_OutData[3];
// AHT20sendOutData[7] = (drf1609.shortAddress >> 8) & 0x00FF;
// AHT20sendOutData[8] = drf1609.shortAddress & 0x00FF;
// AHT20sendOutData[9] = getXY(AHT20sendOutData,10);
}
void I2C_Start(void)
{
SDA_OUT();
IIC_SCL = 1;
delay_ms(4);
IIC_SDA = 1;
delay_ms(4);
IIC_SDA = 0;
delay_ms(4);
IIC_SCL = 0;
delay_ms(4);
}
void I2C_Stop(void)
{
SDA_OUT();
IIC_SDA = 0;
delay_ms(4);
IIC_SCL = 1;
delay_ms(4);
IIC_SDA = 1;
delay_ms(4);
}
bsp_i2c.h
#ifndef __BSP_I2C_H
#define __BSP_I2C_H
#include "sys.h"
#include "delay.h"
#include "usart.h"
//ê1ó?IIC1 1ò??M24C02,OLED,LM75AD,HT1382 PB6,PB7
#define SDA_IN() {GPIOB->CRL&=0X0FFFFFFF;GPIOB->CRL|=(u32)8<<28;}
#define SDA_OUT() {GPIOB->CRL&=0X0FFFFFFF;GPIOB->CRL|=(u32)3<<28;}
//IO2ù×÷oˉêy
#define IIC_SCL PBout(6) //SCL
#define IIC_SDA PBout(7) //SDA
#define READ_SDA PBin(7) //ê?è?SDA
//IIC?ùóD2ù×÷oˉêy
void IIC_Init(void); //3?ê??ˉIICμ?IO?ú
void IIC_Start(void); //·¢?íIIC?aê?D?o?
void IIC_Stop(void); //·¢?íIICí£?1D?o?
void IIC_Send_Byte(u8 txd); //IIC·¢?íò???×??ú
u8 IIC_Read_Byte(unsigned char ack);//IIC?áè?ò???×??ú
u8 IIC_Wait_Ack(void); //IICμè′yACKD?o?
void IIC_Ack(void); //IIC·¢?íACKD?o?
void IIC_NAck(void); //IIC2?·¢?íACKD?o?
void IIC_WriteByte(uint16_t addr,uint8_t data,uint8_t device_addr);
uint16_t IIC_ReadByte(uint16_t addr,uint8_t device_addr,uint8_t ByteNumToRead);//??′??÷μ??·£??÷?tμ??·£?òa?áμ?×??úêy
void read_AHT20_once(int *T,int *H);
void reset_AHT20(void);
void init_AHT20(void);
void startMeasure_AHT20(void);
void read_AHT20(int *T,int *H);
uint8_t Receive_ACK(void);
void Send_ACK(void);
void SendNot_Ack(void);
void I2C_WriteByte(uint8_t input);
uint8_t I2C_ReadByte(void);
void set_AHT20sendOutData(void);
void I2C_Start(void);
void I2C_Stop(void);
#endif
usart.c
#include "sys.h"
#include "usart.h"
//STM32F103o?D?°?ày3ì
//?aoˉêy°?±?ày3ì
/********** mcudev.taobao.com 3??· ********/
//
//è?1?ê1ó?ucos,?ò°üà¨????μ?í·???t?′?é.
#if SYSTEM_SUPPORT_UCOS
#include "includes.h" //ucos ê1ó?
#endif
//
//STM32?a·¢°?
//′??ú13?ê??ˉ
//
//
//?óè?ò???′ú??,?§3?printfoˉêy,??2?Dèòa????use MicroLIB
#if 1
#pragma import(__use_no_semihosting)
//±ê×??aDèòaμ??§3?oˉêy
struct __FILE
{
int handle;
};
FILE __stdout;
//?¨ò?_sys_exit()ò?±ü?aê1ó?°??÷?ú?£ê?
void _sys_exit(int x)
{
x = x;
}
//???¨ò?fputcoˉêy
int fputc(int ch, FILE *f)
{
while((USART1->SR&0X40)==0);//?-?··¢?í,?±μ?·¢?ííê±?
USART1->DR = (u8) ch;
return ch;
}
#endif
/*ê1ó?microLibμ?·?·¨*/
/*
int fputc(int ch, FILE *f)
{
USART_SendData(USART1, (uint8_t) ch);
while (USART_GetFlagStatus(USART1, USART_FLAG_TC) == RESET) {}
return ch;
}
int GetKey (void) {
while (!(USART1->SR & USART_FLAG_RXNE));
return ((int)(USART1->DR & 0x1FF));
}
*/
#if EN_USART1_RX //è?1?ê1?üá??óê?
//′??ú1?D??·t??3ìDò
//×¢òa,?áè?USARTx->SR?ü±ü?a?a??????μ?′í?ó
u8 USART_RX_BUF[USART_REC_LEN]; //?óê??o3?,×?′óUSART_REC_LEN??×??ú.
//?óê?×′ì?
//bit15£? ?óê?íê3é±ê??
//bit14£? ?óê?μ?0x0d
//bit13~0£? ?óê?μ?μ?óDD§×??úêy??
u16 USART_RX_STA=0; //?óê?×′ì?±ê??
void uart_init(u32 bound){
//GPIO???úéè??
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1|RCC_APB2Periph_GPIOA, ENABLE); //ê1?üUSART1£?GPIOAê±?ó
//USART1_TX PA.9
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //PA.9
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //?′ó?í?íìê?3?
GPIO_Init(GPIOA, &GPIO_InitStructure);
//USART1_RX PA.10
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//????ê?è?
GPIO_Init(GPIOA, &GPIO_InitStructure);
//Usart1 NVIC ????
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3 ;//?à??ó??è??3
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //×óó??è??3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQí¨μàê1?ü
NVIC_Init(&NVIC_InitStructure); //?ù?Y???¨μ?2?êy3?ê??ˉVIC??′??÷
//USART 3?ê??ˉéè??
USART_InitStructure.USART_BaudRate = bound;//ò?°?éè???a9600;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//×?3¤?a8??êy?Y??ê?
USART_InitStructure.USART_StopBits = USART_StopBits_1;//ò???í£?1??
USART_InitStructure.USART_Parity = USART_Parity_No;//?T????D£?é??
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//?Tó2?têy?Yá÷????
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //ê?·¢?£ê?
USART_Init(USART1, &USART_InitStructure); //3?ê??ˉ′??ú
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//?a???D??
USART_Cmd(USART1, ENABLE); //ê1?ü′??ú
}
void USART1_IRQHandler(void) //′??ú1?D??·t??3ìDò
{
u8 Res;
#ifdef OS_TICKS_PER_SEC //è?1?ê±?ó?ú??êy?¨ò?á?,?μ?÷òaê1ó?ucosIIá?.
OSIntEnter();
#endif
if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //?óê??D??(?óê?μ?μ?êy?Y±?D?ê?0x0d 0x0a?á?2)
{
Res =USART_ReceiveData(USART1);//(USART1->DR); //?áè??óê?μ?μ?êy?Y
if((USART_RX_STA&0x8000)==0)//?óê??′íê3é
{
if(USART_RX_STA&0x4000)//?óê?μ?á?0x0d
{
if(Res!=0x0a)USART_RX_STA=0;//?óê?′í?ó,??D??aê?
else USART_RX_STA|=0x8000; //?óê?íê3éá?
}
else //?1??ê?μ?0X0D
{
if(Res==0x0d)USART_RX_STA|=0x4000;
else
{
USART_RX_BUF[USART_RX_STA&0X3FFF]=Res ;
USART_RX_STA++;
if(USART_RX_STA>(USART_REC_LEN-1))USART_RX_STA=0;//?óê?êy?Y′í?ó,??D??aê??óê?
}
}
}
}
#ifdef OS_TICKS_PER_SEC //è?1?ê±?ó?ú??êy?¨ò?á?,?μ?÷òaê1ó?ucosIIá?.
OSIntExit();
#endif
}
#endif
usart.h
#ifndef __USART_H
#define __USART_H
#include "stdio.h"
#include "sys.h"
//STM32F103o?D?°?ày3ì
//?aoˉêy°?±?ày3ì
/********** mcudev.taobao.com 3??· ********/
//
//STM32?a·¢°?
//′??ú13?ê??ˉ
#define USART_REC_LEN 200 //?¨ò?×?′ó?óê?×??úêy 200
#define EN_USART1_RX 1 //ê1?ü£¨1£?/???1£¨0£?′??ú1?óê?
extern u8 USART_RX_BUF[USART_REC_LEN]; //?óê??o3?,×?′óUSART_REC_LEN??×??ú.??×??ú?a??DD·?
extern u16 USART_RX_STA; //?óê?×′ì?±ê??
//è?1???′??ú?D???óê?£???2?òa×¢êíò???oê?¨ò?
void uart_init(u32 bound);
#endif
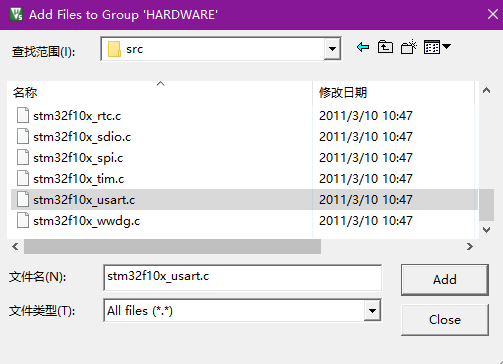
2、在HARDWARE檔案夾中添加stm32f10x_usart.c,該檔案位于STM32F10x_FWLib\src中,
 3.按照上面所述的方法添加“溫度”和“濕度”的字模,修改main.c如下
3.按照上面所述的方法添加“溫度”和“濕度”的字模,修改main.c如下
#include "delay.h"
#include "sys.h"
#include "oled.h"
#include "gui.h"
#include "test.h"
#include "usart.h"
#include "bsp_i2c.h"
int main(void)
{
int *H,*T;
int H1=0,T1=0;
int a,b,c,d;
H=&H1;
T=&T1;
delay_init();
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
OLED_Init();
OLED_Clear(0);
uart_init(115200);
IIC_Init();
while(1)
{
read_AHT20_once(T,H);
GUI_ShowCHinese(16,10,16,"溫度",1);
a=*T/10;
b=*T%10;
GUI_ShowNum(60,10,a,2,16,1);
GUI_ShowString(80,10,".",16,1);
GUI_ShowNum(82,10,b,2,16,1);
GUI_ShowCHinese(16,30,16,"濕度",1);
c=*H/10;
d=*H%10;
GUI_ShowNum(60,30,c,2,16,1);
GUI_ShowString(80,30,".",16,1);
GUI_ShowNum(82,30,d,2,16,1);
}
}
4.編譯并燒錄程式到stm32中,可見OLED顯示了溫濕度,
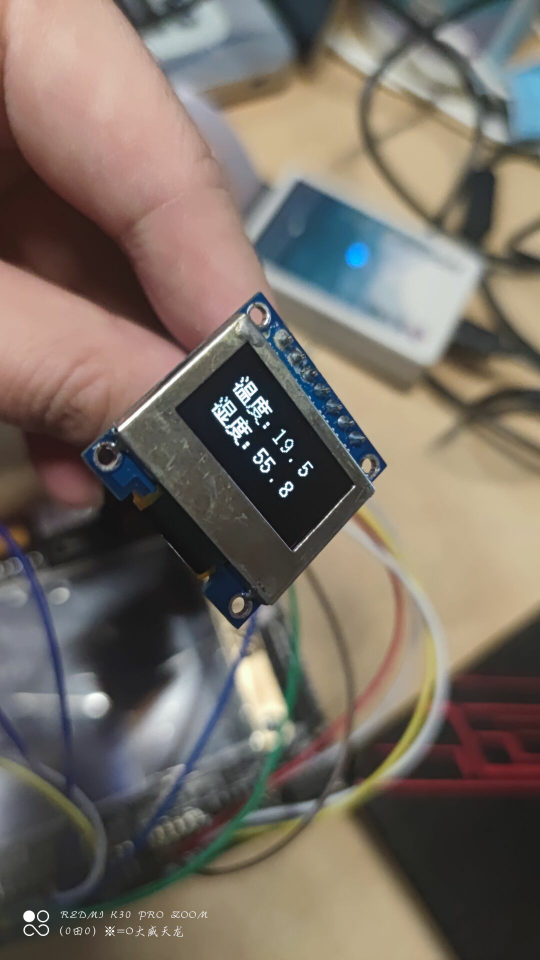 對芯片吹口氣資料顯示發生變化:
對芯片吹口氣資料顯示發生變化:

3.上下的滑動顯示長字符
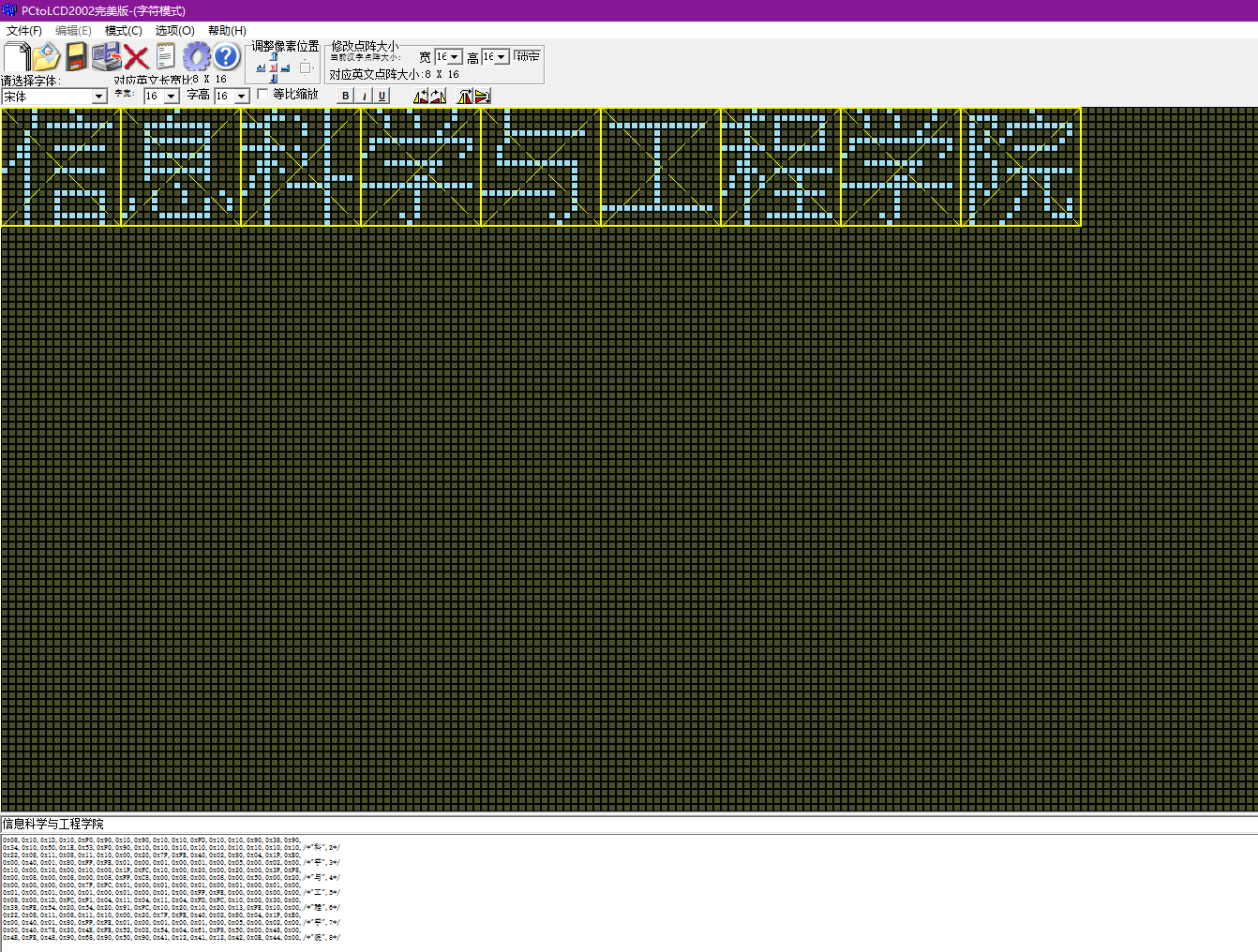
1.按上述方式添加“資訊科學與工程學院”的字模,并修改main.c如下,
 代碼如下:
代碼如下:
#include "delay.h"
#include "sys.h"
#include "oled.h"
#include "gui.h"
#include "test.h"
int main(void)
{
delay_init(); //?óê±oˉêy3?ê??ˉ
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //éè??NVIC?D??·?×é2:2???à??ó??è??£?2???ìó|ó??è??
OLED_Init(); //3?ê??ˉOLED
OLED_Clear(0); //???ᣨè?oú£?
while(1)
{
GUI_ShowCHinese(0,25,16,"資訊科學與工程學院",1);
delay_ms(50);
roll();
}
}
 2.在oled.c中添加如下滾動代碼,
2.在oled.c中添加如下滾動代碼,
void roll(void)
{
OLED_WR_Byte(0x2e,OLED_CMD);
OLED_WR_Byte(0x29,OLED_CMD);
OLED_WR_Byte(0x00,OLED_CMD);
OLED_WR_Byte(0x00,OLED_CMD);
OLED_WR_Byte(0x07,OLED_CMD);
OLED_WR_Byte(0x07,OLED_CMD);
OLED_WR_Byte(0x01,OLED_CMD);
OLED_WR_Byte(0x2F,OLED_CMD);
}
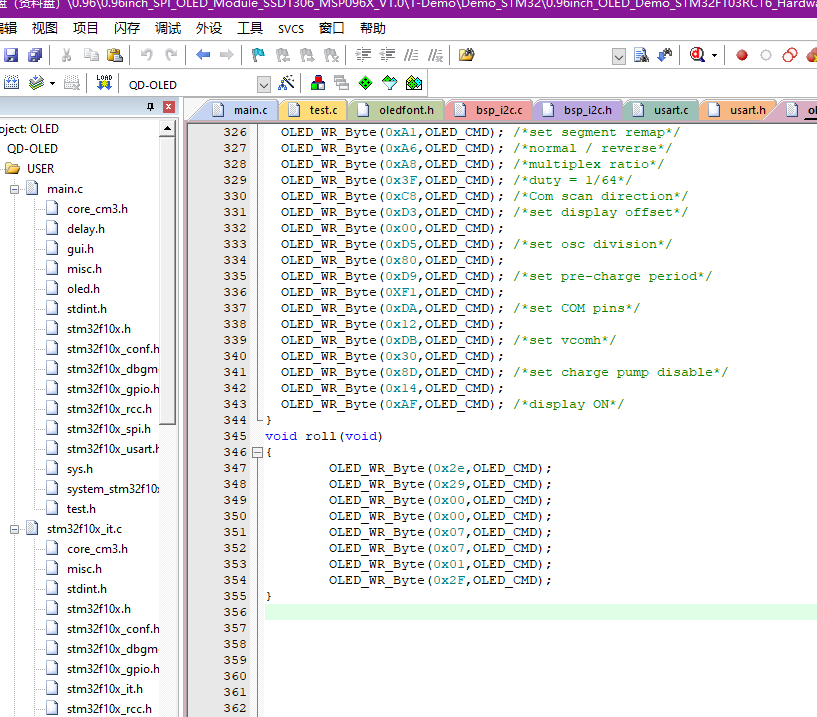 3.編譯并燒錄程式到stm32中,可看見欄位向上滾動,
3.編譯并燒錄程式到stm32中,可看見欄位向上滾動,
總結
這次的實驗讓我學會了用stm32的SPI介面實作對OLED的顯示控制,加強了用stm32溫度模塊的練習,
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/241412.html
標籤:其他