資料關聯一直是SLAM實際應用中一個非常重要的問題,在將資料融入到地圖中前,新的測量與地圖中已存在的地標的關聯,在融合后,這些關聯不能被修改,這樣的問題是單個的錯誤資料關聯可能誘導地圖估計的發散,經常導致定位演算法災難性的失敗,當100%正確的關聯強制正確的操作SLAM演算法將會變得脆弱,
批量驗證
幾乎所有的SLAM實作方法都僅用統計的驗證門限來進行資料關聯,其是一個繼承自目標追蹤的剔除不可能的關聯[Y. Bar-Shalom and T.E. Fortmann, Tracking and Data Association. New York: Academic, 1988.]的方法,早期的SLAM實作方法通過測驗被觀察到的路標是否臨近于預測的目標來獨立的考慮每個測量到路標的關聯,假如機器人位姿非常的不確定其所有的都失效了,但是大部分稀疏的結構化的環境,獨立的門限是及其不可靠的,
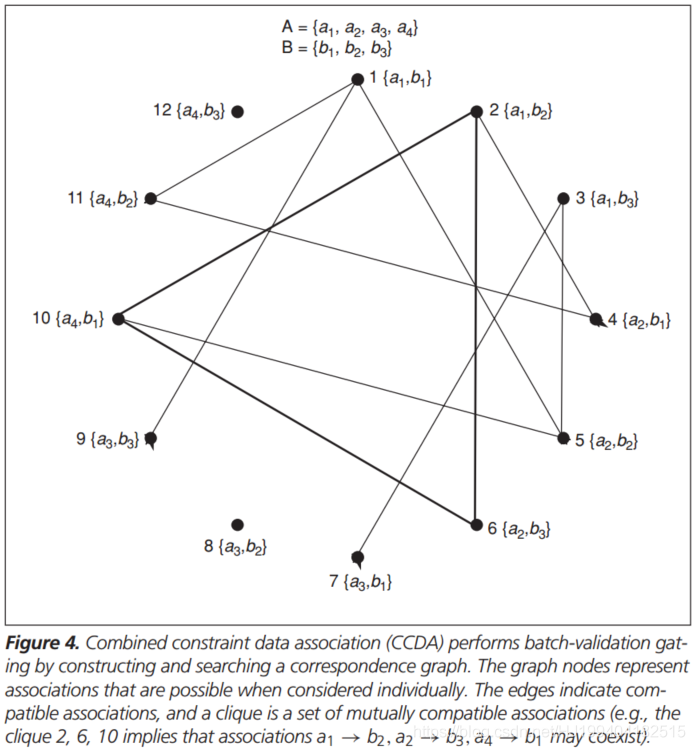
一個重要的進步是批量門限的概念,這里多重關聯被同時考慮,相互關聯兼容性利用路標間的幾何相似關系,這兩個批量驗證的存在形式分別是聯合兼容分支與界(JCBB)[J. Neira and J.D. Tardo′s, “Data association in stochastic mapping using the joint compatibility test,” IEEE Trans. Robot. Automat., vol. 17, no. 6, pp. 890–897, 2001.]定方法,其是一個樹狀搜索,和組合約束資料關聯(CCDA)[T. Bailey, “Mobile robot localisation and mapping in extensive outdoor environments,” Ph.D. dissertation, Univ. Sydney, Australian Ctr. Field Robotics, 2002.],其是一種圖形搜索方法(看圖4),后者(又或者是隨機化變數的JCBB[J. Neira, J.D. Tardo′s, and J.A. Castellanos, “Linear time vehicle relocation in SLAM,” in Proc. IEEE Int. Conf. Robotics Automation, 2003.])能夠實作在任何不知道機器人位姿的情況下的可靠資料關聯,
單獨的批量門限常常足夠實作可靠的資料關聯:如果門限是被充分約束的,關聯的誤差會產生顯著的影響[S.S. Blackman and R. Popoli, Design and Analysis of Modern Tracking Systems. Norwood, MA: Artech, 1999.],如果關聯上一個錯誤的且在物理上接近正確的路標,那么不一致性是較小的,這可能不會經常有效,特別是在大的復雜環境中,更綜合的資料關聯機制(例如多重假設追蹤[Y. Bar-Shalom and T.E. Fortmann, Tracking and Data Association. New York: Academic, 1988.])是必須的,
外觀簽名
單獨的幾何圖案門限不是唯一的可靠資料關聯方法,許多傳感模式,例如視覺,提供了豐富的資訊,包括了形狀,顏色和紋理,所有的這些可以被用來發現兩個資料集之間的聯系,對于SLAM,外觀簽名用來預測可能的關聯式有用的,例如關閉一個環路,或者通過提供額外的區別的資訊輔助常規的門限,
在歷史上,外觀簽名和影像相似性度量被發展用來索引影像資料庫[Y. Rubner, C. Tomasi, and L.J. Guibas, “A metric for distributions with applications to image databases,” in Proc. IEEE Int. Conf. Computer Vision, 1998.]和識別拓撲地圖中的地方[S. Argamon-Engelson, “Using image signatures for place recognition,”Pattern Recognit. Lett., vol. 19, no. 4, pp. 941–951, 1998.],[I. Ulrich and I. Nourbakhsh, “Appearance-based place recognition for
topological localization,” in Proc. IEEE Int. Conf. Robotics Automation, 2000, pp. 1023–1029.],在最近幾年,外觀測量已被應用到探測SLAM中的環路[J.S. Gutmann and K. Konolige, “Incremental mapping of large cyclic environments,” in Proc. IEEE Int. Symp. Computational Intelligence Robotics Automation, 1999, pp. 318–325],[P. Newman, D. Cole, and K. Ho, “Outdoor SLAM using visual appearance and laser ranging,” in Proc. IEEE Int. Conf. Robotics Automation, 2006.],Newman等人的基于視覺的外觀簽名環路探測的作業,[P. Newman, D. Cole, and K. Ho, “Outdoor SLAM using visual appearance and laser ranging,” in Proc. IEEE Int. Conf. Robotics Automation, 2006.]引入了兩個重要的創新,計算在一個序列上的影像的相似性度量,而不是單個影像,應用特征值技術移除共模相似性,該方法通過僅考慮感興趣或者非共有的匹配在相當程度的減少了假陽性的發生,
多重假設資料關聯
多重假設資料關聯對于在雜亂的環境中穩健的目標追蹤是非常重要的[Y. Bar-Shalom and T.E. Fortmann, Tracking and Data Association. New York: Academic, 1988],其通過產生一個分離的對于每個關聯假設追蹤的估計解決關聯歧義,隨著時間的推移,創造了一個不斷分支的軌跡樹,追蹤的軌跡數量通常受可用的計算資源限制,且低似然性追蹤通過假設樹修正,
多重假設追蹤(MHT)對于穩健的SLAM實作同樣重要,特別是在大的復雜的環境下,例如,在環路倍訓中,機器人需要理想的維持分離可疑回路假設,和同樣在感知環境中結構相似情況的“沒有回路”的假設,與此同時,MHT被應用到建圖問題[I.J. Cox and J.J. Leonard, “Modeling a dynamic environment using a bayesian multiple hypothesis approach,” Artif. Intell., vol. 66, no. 2, pp. 311–344, 1994.],這還沒有應用到SLAM環境中,維持對每個假設的分離地圖估計的計算量是一個主要的障礙,應用稀疏化或者子地圖方法的易處理的方案是可能的,FastSLAM演算法是一個固有的多重假設方案,因為每個粒子都有它自己的地圖估計,FastSLAM演算法的一個重要的屬性是它能夠執行粒子資料關聯[M. Montemerlo and S. Thrun, “Simultaneous localization and mapping with unknown data association using FastSLAM,” in Proc. IEEE Int. Conf. Robotics Automation, 2003, pp. 1985–1991.],
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/245665.html
標籤:其他