本文是我按照教材《攝影測量學》(第三版,武漢大學出版社,王佩軍、徐亞明主編)總結的,供自己強化記憶、準備期末考試,順便也分享給大家,每一個字都是手動敲的哦,
第一章 緒論
1.攝影測量學:利用攝影機攝取像片,通過像片來研究和確定被攝物體的大小、位置、形狀和互相關系的一門科學技術,
2.攝影測量按攝影機平臺位置的不同可以分為:航天攝影測量、航空攝影測量、地面攝影測量、水下攝影測量,按攝影機平臺距離被攝物體的遠近可以分為:航天攝影測量、航空攝影測量、地面攝影測量、近景攝影測量、顯微攝影測量,按用途可分為:地形攝影測量、非地形攝影測量,
3.攝影測量學發展的三個階段:模擬攝影測量、決議攝影測量、數字攝影測量,
4.模擬攝影測量:在室內用光學機械投影器模擬攝影程序,交匯出被攝物體的空間位置,建立與實地相似的縮小模型,再在該模型上進行測量,
5.決議攝影測量:在計算機的輔助下,將建立的投影光束、單位模型或航帶模型以及區域模型的的數學模型根據少量的地面控制點,按照最小二乘原理,計算出加密點的地面坐標,
6.數字攝影測量:利用數字影像資訊、基于攝影測量學原理和計算機視覺相結合,從數字影像中自動(或半自動)地提取出有用的影像資訊并用數學方式表達幾何資訊,
7.4D產品:DEM(Digital Elevation Model,數字高程模型),DOM(Digital Orthophoto Map,數字正射影像圖),DRG(Digital Raster Graphic,數字柵格地圖),DLG(Digital Line Graphic,數字線劃圖),
第二章 影像獲取
1.主距:物鏡中心到底片的距離,
2.焦距:物鏡中心到焦點的距離,
3.主光軸:物鏡中心到相框平面的距離,
4.像場:物鏡焦面上成像清晰的范圍,
5.像場角:像場直徑對物鏡中心所成的夾角,
6.中焦距攝影機:焦距大于150mm小于300mm,
第三章 攝影測量基礎知識
1.攝影比例尺1/m(也叫像片比例尺):它的嚴格定義為航攝像片上一條線段l與地面上相應線段的水平長度L之比,即1/m=l/L;但由于航空攝影時,像片不能保證嚴格水平,且地面也會有起伏,這就導致像片上各點的比例尺都不一樣,所以我們說的像片比例尺其實是平均像片比例尺,用物鏡焦距與攝影區域內的平均航高的比來表示,即1/m=f/H,
2.攝影測量生產對攝影資料的要求:像片的色調要好,航向重疊要大于60%,旁向重疊要大于30%,像片傾角(攝影機主軸與鉛錘方向的夾角)要小于2°,航向彎曲(最大偏距與航線總長的比)不超過3%,像片旋角(相鄰像片的主點連線與像幅沿航線方向兩標框連線間的夾角)小于6°,
3.平行投影:投影光線互相平行的投影,
4.正射投影:投影光線互相平行且垂直于投影面的投影,
5.中心投影:投影光線匯于一點的投影,
6.航攝像片上特殊的點線面: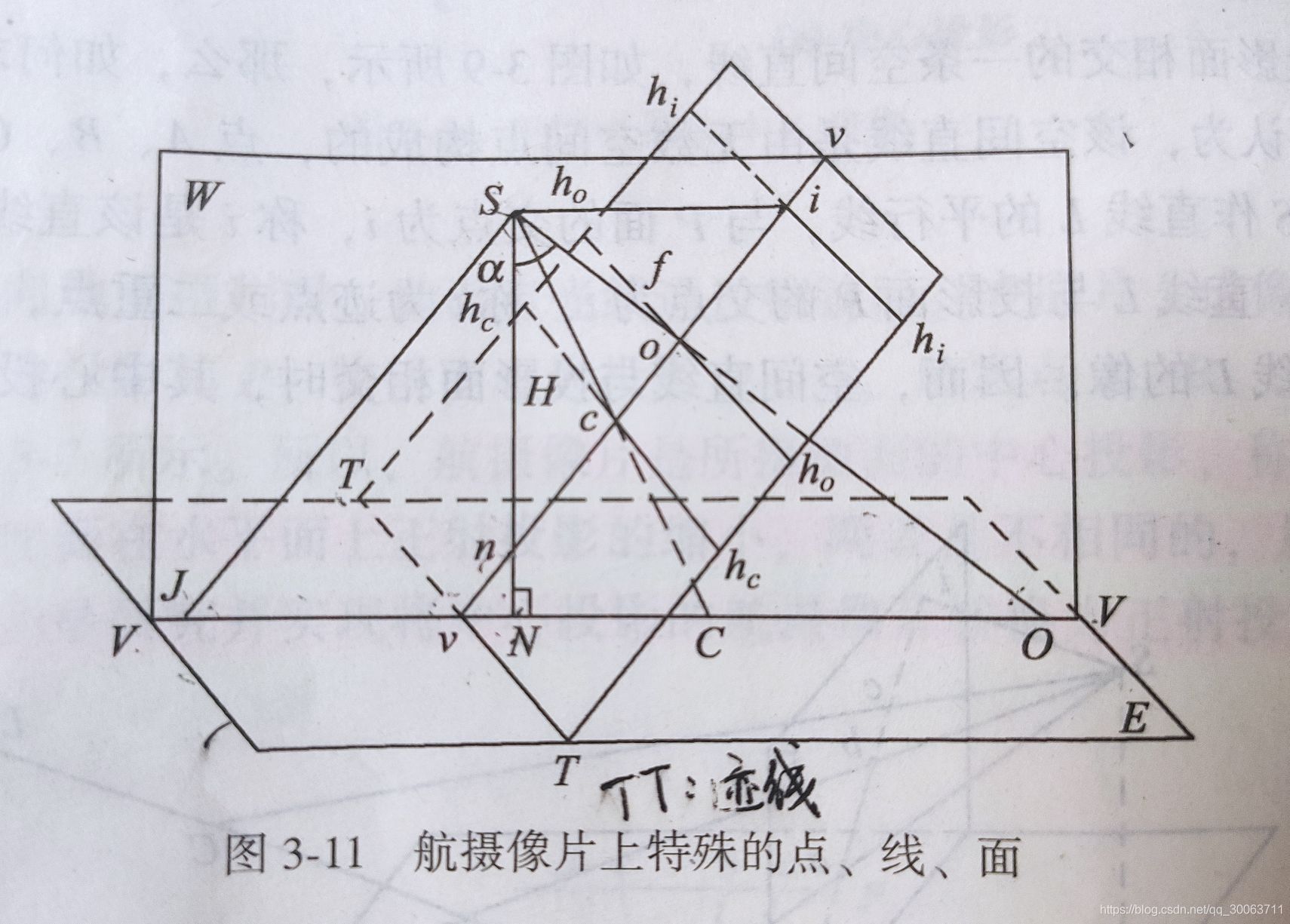
(1)攝影中心S:攝影機的物鏡中心,
(2)像主點o:過攝影中心S向像平面P做的垂線與像平面P的交點,
(3)攝影機軸So:過攝影中心S和像主點o的直線So,
(4)攝影機主距So:線段So的長度,
(5)地面主點O:攝影機軸So與水平地面E的交點,
(6)主垂線SN:過攝影中心S向水平地面E做的鉛垂線,
(7)像底點n:主垂線SN與像平面P的交點,
(8)地底點N:主垂線SN與水平地面E的交點,
(9)航高H:攝影中心S到水平地面E的距離,即線段SN的長度,
(10)像片傾角α:攝影機軸So與主垂線SN之間的夾角,
(11)等角點c:像片傾角α的角平分線與像平面P的交點,
(12)地面等角點C:像片傾角α的角平分線與水平地面E的交點,
(13)主垂面W:過主垂線SN和攝影機軸So的垂面,
(14)主縱線vv:主垂面W與像平面P的交線,
(15)基本方向線VV:主垂面W與水平地面E的交線,
(16)合面Es:過攝影中心S做的與水平地面E平行的平面(未畫出),
(17)合線hihi:合面Es與像平面P的交線,
(18)主合點i:合線hihi與主縱線vv的交點,
(19)等比線hchc:過等角點c做的與合線hihi平行的直線,
(20)主橫線hoho:過像主點o做的與合線hihi平行的直線,
7.像平面坐標系:在像片上以像主點o為原點做的右手平面坐標系,但在實際應用中,常以標框連線的交點為原點、以與航線相近的連線為x軸,構成右手平面坐標系,
8.像空間坐標系:以攝影中心S為原點,x、y軸分別平行于像平面坐標系的x、y軸,z軸與光軸重合建立的空間坐標系,
9.像空間輔助坐標系:是空間右手直角坐標系,它的x、y、z軸用u、v、w來表示,常有3種選取方法,
(1)u、v、w軸分別平行于地面攝影測量坐標系D-XYZ的X、Y、Z軸,
(2)以每條航線第一張像片的像空間坐標系為像空間輔助坐標系,
(3)以每個立體像對的左片的攝影中心S為原點,以攝影基線為u軸,以攝影基線和左片的光軸構成的平面為uw面,以過原點且垂直于uw面的直線為v軸,
10.地面測量坐標系:通常是指高斯-克呂格6°帶或3°帶投影的平面直角坐標系(如1954年北京坐標系和1980西安大地坐標系)與定義的某一基準面起量的高程(如1956黃海高程或1985國家基準高程),兩者結合而成的空間左手直角坐標系,用T-XtYtZt表示,用攝影測量的方法求得的地面坐標值都要轉換成此坐標系下的坐標值方能提交給用戶,
11.地面攝影測量坐標系:是以測區內某一地面點為原點,以與航向大致一致的水平方向為X軸,以與X軸正交的直線為Y軸,以鉛錘方向為Z軸,構成的空間右手直角坐標系,建立這個坐標系的目的是作為一種從像空間輔助坐標轉化為地面測量坐標的過渡,以方便計算,
12.內方位元素:表示攝影中心S與像片之間的位置關系的引數,為x0、y0、f,
13.外方位元素:表示(攝影中心S和像片)與地面坐標系之間的位置關系和姿態關系的引數,為φ、ω、κ、Xs、Ys、Zs,如圖:
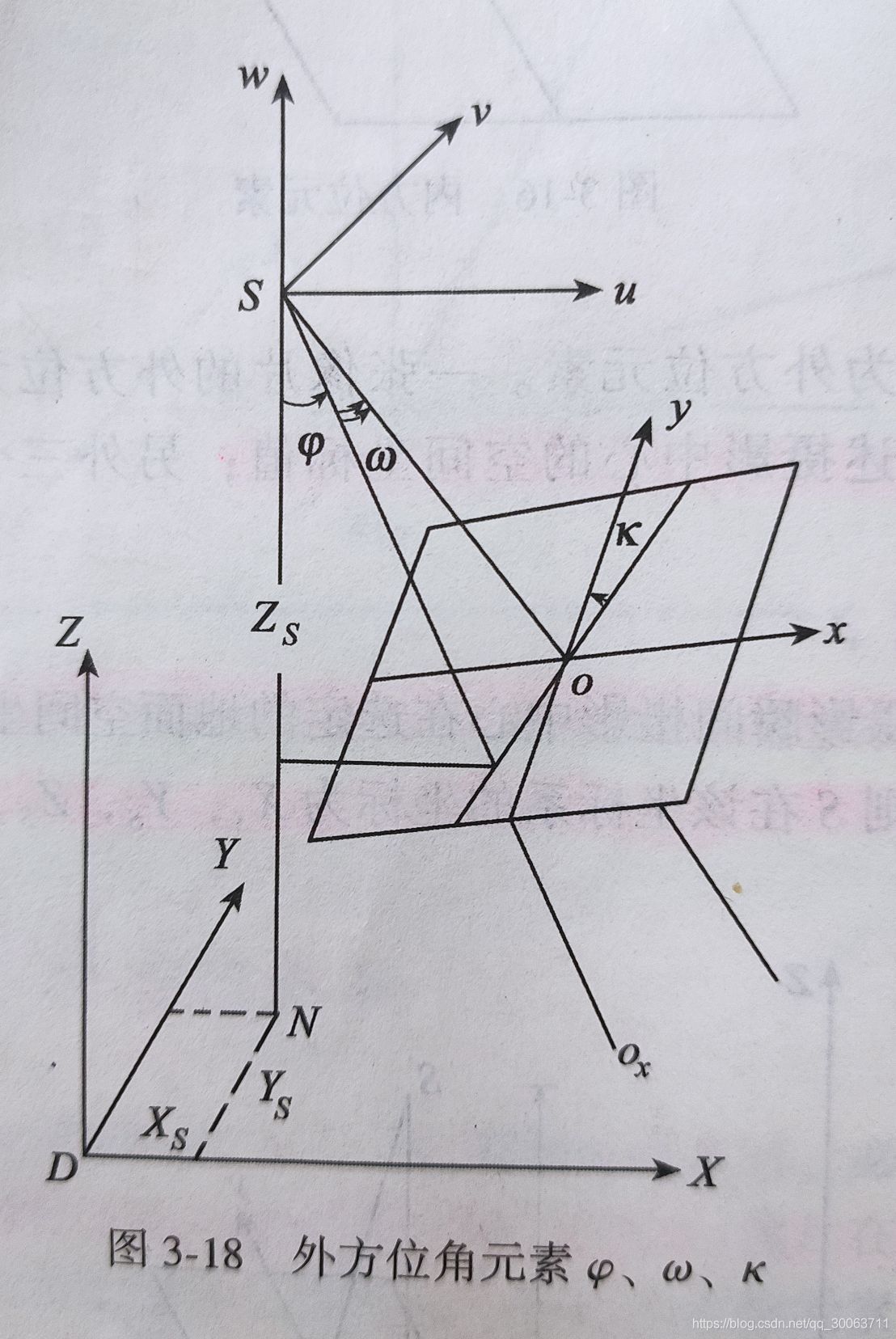
14.從像空間坐標系到像空間輔助坐標系的變換公式:
[ u v w ]T = [ a1 a2 a3, b1 b2 b3, c1 c2 c3] [ x y -f ]T = R[ x y -f]T
其中,R矩陣為方向余弦ai、bi、ci組成的,方向余弦可由三個外方位角元素經三角函陣列合表示出來,
15.共線方程的推導:
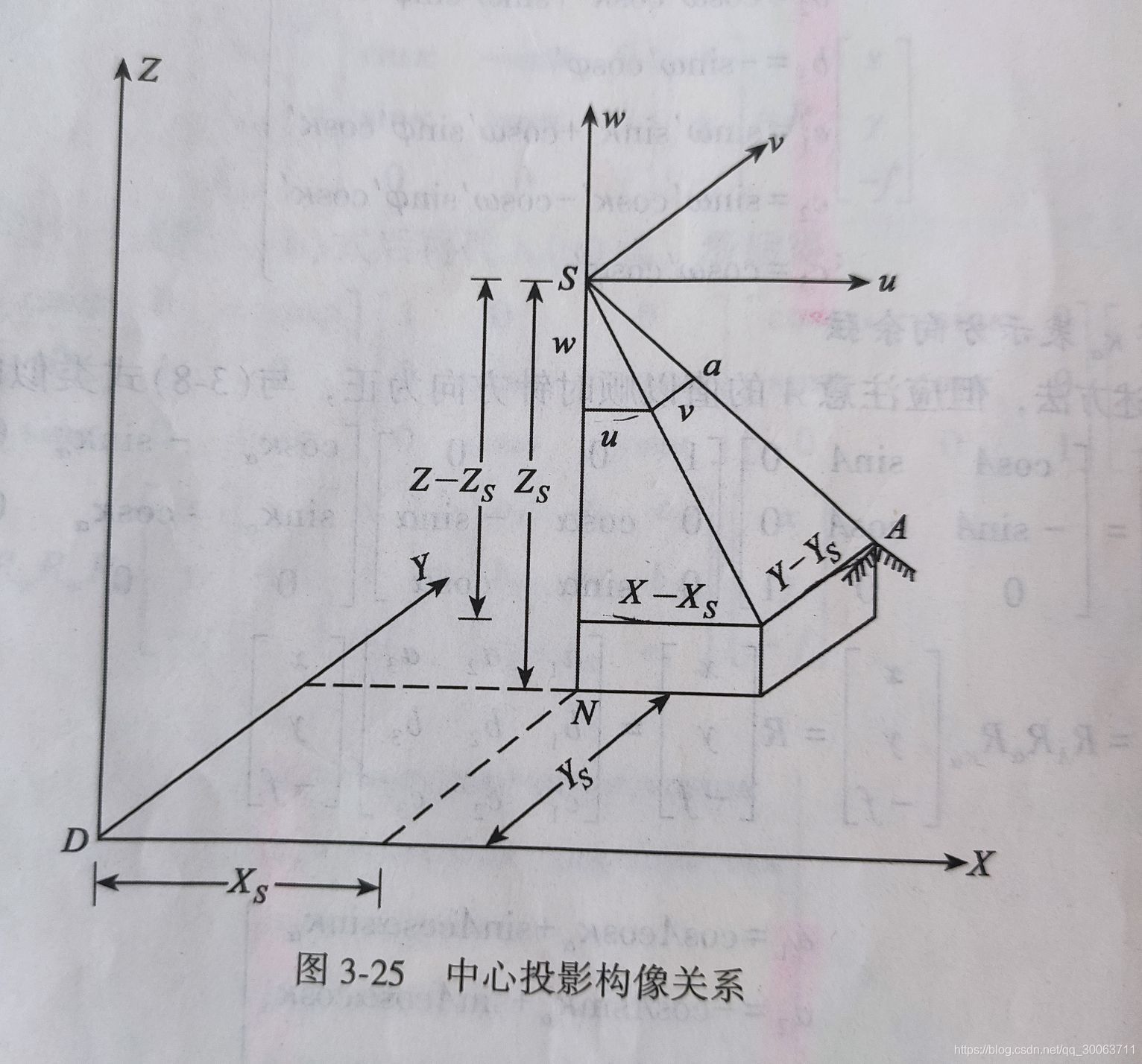
光是沿直線傳播的,因此攝影中心S、像點a(x, y, -f)、對應地面點A(X, Y, Z)是在一條直線上的,則,由相似三角形得:
u/(X-Xs) = v/(Y-Ys) = w/(Z-Zs) = 1/λ
即[ u v w ]T = (1/λ)[ X-Xs Y-Ys Z-Zs ]T
上式聯立從像空間輔助坐標系到像空間坐標系的變換公式:[ x y -f ]T = R-1[ u v w ] ,并消去λ,即得到共線方程:
x = -f*[ a1(X-Xs)+b1(Y-Ys)+c1(Z-Zs)] / [a3(X-Xs)+b3(Y-Ys)+c3(Z-Zs)]
y = -f*[ a2(X-Xs)+b2(Y-Ys)+c2(Z-Zs)] / [a3(X-Xs)+b3(Y-Ys)+c3(Z-Zs)]
16.像點位移:因為航攝像片是地面的中心投影,所以當地面地形有起伏或者像片不水平的時候,地面點在像片上的構象就會與正確位置產生偏移,這種現象稱為像點位移,對像點位移的改正叫做像片糾正,
17.引起像片位移產生的因素有:地面有起伏、像片不水平、物鏡畸變、大氣折光、地球曲率、底片形變等,
18.航攝像片與地形圖的區別:
(1)表示方法和內容不同,地形圖是按規定的各種符號、注記、等高線來描述地形地貌的,且內容有取舍;而航攝像片則表示為影像的大小、形狀、色調,內容全部展示,
(2)投影方法不同,航攝像片是中心投影,地形圖是正射投影,
第四章 雙像立體測圖原理與立體測圖
1.生理視差:肉眼前的2個點A和B因距離眼睛的距離不相等,因此它們在左眼網膜窩和右眼網膜窩留下的弧長也不相等,弧長的差即為生理視差,生理視差是產生立體視覺的根本原因,
2.產生人造立體視覺的四個條件:
(1)兩張像片必須是在兩個不同位置對同一地物攝取的像片,
(2)分像:每只眼睛必須只能觀察像對的一張像片,
(3)兩張像片上的同名像點的連線必須與眼睛的基線大致平行,
(4)兩張像片的比例尺應該相近(相差<15%),
3.實作分像的方法:
(1)立體鏡觀察法(如使用橋式立體鏡),
(2)雙目鏡觀測光路的立體觀察,
(3)互補色法立體觀察,
(4)同步閃閉法立體觀察,
(5)偏振光法立體觀察,
(6)立體量測,
4.立體像對上特殊的點線面:
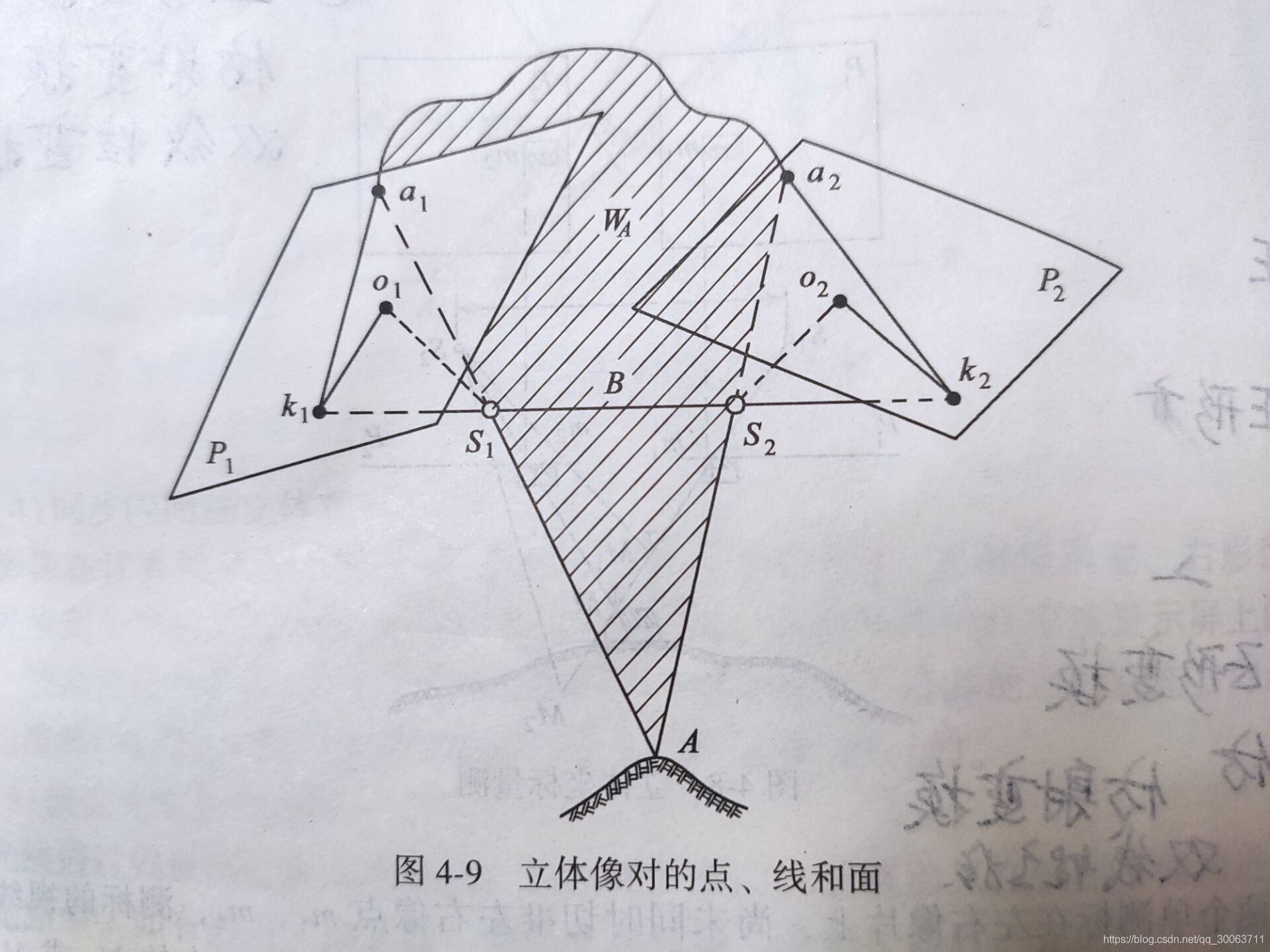 (1)攝影基線B:立體像對的兩個攝影中心的連線,
(1)攝影基線B:立體像對的兩個攝影中心的連線,
(2)同名像點a1、a2:由同一地面點A在左右像片上的構象,
(3)同名射線ASa1、ASa2:由同一地面點A發出的射向兩個攝影中心的射線,
(4)核面W:過攝影基線B和某一地面點A的平面,
(5)核線k1a1、k2a2:核面W與像平面的交線,
(6)核點k1、k2:基線B與像平面的交點,
(7)主核面:剛好通過像主點的核面,
(8)垂核面:剛好通過像底點的核面,
5.立體攝影測量(亦稱雙像立體測圖):利用一個立體像對,在恢復了它們的內、外方位元素后,建立與實地相似的立體幾何模型,并對其進行量測的攝影測量方法,
6.內定向:指恢復立體像對的內方位元素的程序,目的是恢復攝影瞬間時的光束,確定像主點在像平面坐標系中的坐標,
7.相對定向:指重建與實地相似的立體幾何模型的程序,完成相對定向后,就能重建與實地相似的立體幾何模型,但是這個模型的大小和空間方位時任意的,相對定向有5個元素,
8.絕對定向:指借助已知的地面控制點,把經過了相對定向的立體幾何模型進行平移、旋轉、縮放,將其納入到地面攝影測量坐標系的程序,對經過了絕對定向的立體幾何模型進行量測,就能得到地面點的地面攝影測量坐標系坐標,絕對定向有7個元素,為:Xs、Ys、Zs、λ、Φ、Ω、Κ,
9.上下視差Q:上下移動承影面,使得左右投影光線在X方向上沒有偏離而只在Y方向上有偏離,Y值的差即為上下視差,上下視差是檢核立體像對有沒有完成相對定向的標志,如果完成了相對定向,則Q=0,
10.連續像對相對定向:將左片置平,以左片的像空間坐標系為本像對的像空間輔助坐標系,相對定向元素為為:bv、bw、φ2、ω2、κ2,
11.單獨像對相對定向:將攝影基線置平,以攝影中心為原點,以攝影基線為u軸,以攝影機軸和主垂線構成的平面為uw面,以過攝影中心且與uw面垂直的直線為v軸構建像空間輔助坐標系,相對定位元素為:φ1、κ1、φ2、ω2、κ2,
12.絕對定向的基本關系式(即從像空間輔助坐標系變換到地面攝影測量坐標系的公式,也叫做空間相似變換式):
[ X Y Z ]T = λ [ a1 a2 a3, b1 b2 b3, c1 c2 c3 ][ U V W ] T+ [ Xs Ys Zs ]T
第五章 攝影測量決議基礎
1.左右視差p:立體像對中左右像片的同名像點在各自的像平面坐標系中的x坐標之差,即p = x1-x2,
2.上下視差q:立體像對中左右像片的同名像點在各自的像平面坐標系中的y坐標之差,即q = y1-y2,
3.單像空間后方交會:利用至少3個已知的地面平高控制點,并量測出像片上對應的3個像點的坐標,以共線方程為基礎,反求該像片的外方位元素,
4.單像空間后方交會的解算程序:
(1)獲取已知資料,如像片比例尺1/m、平均航高H、內方位元素x0、y0、f、3個以上的地面平高控制點坐標(并將其轉化為地面攝影測量坐標),且這三個控制點不在同一條直線上,
(2)量測控制點對于的像點坐標,
(3)確定待求數(6個外方位元素)的初始值,在豎直攝影的情況下,φ0=ω0=κ0=0°,Zs0=mH,Xs0、Ys0取控制點的平均值,
(4)計算旋轉矩陣R,利用角元素的近似值計算方向余弦,組成R陣,
(5)利用待求數初始值和共線方程,計算控制點像點的坐標近似值,
(6)組成誤差方程,
(7)組成法方程,
(8)計算出外方位元素的改正值,并將其加到初始值上,得到外方位元素近似值,
(9)重復第四步到第八步,直到迭代趨于收斂,
5.立體像對的前方交會:利用立體像對的內、外方位元素和像點坐標,由同名射線必然交于一點的原理來確定相應地面點的地面坐標,
6.立體像對的前方交會的解算程序:
(1)獲取已知資料,即兩張像片的內、外方位元素,
(2)量測像點坐標,
(3)由角元素計算旋轉矩陣R1、R2,
(4)計算攝影基線分量,
(5)計算像點在左右像空間輔助坐標系中的坐標,
(6)計算投影系數N1、N2,
(7)計算待定點的地面攝影測量坐標系,
7.總結后交-前交法的解算步驟:
(1)在立體像對的重疊部分所對應的實地測出至少3個控制點坐標,且三這3個控制點不在同一條直線上,并將其轉化為地面攝影測量坐標系坐標,
(2)量測控制點對應的像點的坐標,
(3)用后方交會法計算出兩張像片的外方位元素,
(4)用前方交會法計算出待定點的地面坐標i,
8.立體像對的決議法相對定向:由共面條件出發,計算出相對定向的5個元素,從而建立與實地相似的立體幾何模型,
9.共面條件:指同名射線S1a1和S2a2交于一點時,向量B、向量S1a1、向量S2a2必然共面,三個向量共面,則它們的混合積為0,即:B ×(S1a1·S2a2)= 0,混合積為0是完成相對定向的標準,
10.連續像對相對定向元素計算流程:
(1)輸入同名像點的像點坐標,
(2)確定相對定向元素的初始值:bv=bu=φ2=ω2=κ2=0,
(3)計算右片的方向余弦,
(4)計算像點的像空間輔助坐標,
(5)計算誤差方程的系數和常數項,
(6)對誤差方程進行法化并累加,
(7)重復第3步至第6步,直到所有定向點都計算完畢,
(8)解法方程,求得改正數,
(9)求未知數的新值,
(10)檢查改正數是否小于限差,如不小于,則重復第2步至第9步,直到改正數小于限差,
(11)得到未知數最終的解,
11.立體像對的決議法絕對定向:利用至少2個平高控制點和1個高程控制點,從絕對定向的基本關系式出發,求解7個絕對定向元素λ、Φ、Ω、Κ、Xs、Ys、Zs,
12.絕對定向的基本關系式(也叫空間相似變換式,實質為從像空間輔助坐標系變換到地面攝影測量坐標系的關系式):
[ X Y Z ] T= λ[ a1 a2 a3, b1 b2 b3, c1 c2 c3 ] [ U V W ]T+[ Xs Ys Zs ]T
13.決議法絕對定向的計算流程:
(1)確定待求引數的初始值:λ=1、Φ=Ω=Κ=0°、Xs=Ys=Zs=0,
(2)計算地面控制點在地面攝影測量坐標系中的重心坐標和重心化坐標,
(3)計算地面控制點在像空間輔助坐標系中的重心坐標和重心化坐標,
(4)計算常數項,
(5)計算誤差方程的系數,
(6)逐點法化及法方程求解,
(7)計算待定引數的新值,
(8)判斷待求引數的改正值是否小于限差,若不小于,則用待定引數的新值的新值重復上述步驟,直到滿足限差,即求得了最終的7個絕對定向元素,
(9)然后可以根據待求點的重心化的像空間輔助坐標,化為重心化的地面攝影測量坐標,再加上重心坐標,就獲得了正常的地面攝影測量坐標,最后化為地面測量坐標就可以提交成果了,
14.總結相對定向-絕對定向法的解算步驟:
(1)用連續像對或單獨像對的相對定向元素的誤差方程式求解像對的相對定向元素,
(2)組成左右像片的旋轉矩陣R1、R2,并利用前方交會式求出像點在像空間輔助坐標系中的坐標,
(3)根據已知的地面控制點,按絕對定向元素的誤差方程式求解該立體模型的7個絕對定向元素,
(4)按絕對定向公式將所有的待定點的坐標納入到地面攝影測量坐標系,
15.立體像對的光束法嚴密解(也叫一步定向法):兩張像片內的所有控制點和未知點都按共線方程列出誤差方程式,在像對內進行聯合解算,同時求出兩張像片的外方位元素和未知點的坐標,這種方法的理論較為嚴密、精度較高,是一種比較好的解法,
16.光束法嚴密解也是利用從近似值開始迭代,直到滿足限差為止的方法,通常用后方交會-前方交會法求出的外方位元素和待定點坐標作為光束法嚴密解的初始值,
17.雙像決議攝影測量三種解法的比較:
(1)后方交會-前方交會法:前方交會的結果依賴于后方交會的精度,前方交會的程序中沒有充分利用多余條件進行平差計算,
(2)相對定向-絕對定向法:計算公式較多,最終的點位精度取決于相對定向和絕對定向的精度,這種方法不能嚴格地表達外方位元素,
(3)光束法嚴密解:理論嚴密、精度最高,待定點的坐標是按最小二乘原則求得的,
(4)基于以上分析可知,后方交會-前方交會法常在已知像片的外方位元素、需確定少量待定點坐標時采用;相對定向-絕對定向法多在航帶法空中三角測量中采用;光束法嚴密解在光束法決議空中三角測量中采用,
第六章 決議空中三角測量
1.決議空中三角測量(俗稱攝影測量加密)的定義:根據航攝像片上所量測的像點坐標和極少量的地面控制點,按一定的數學模型平差解算出所需的全部地面控制點和每張像片的外方位元素,
2.決議空中三角測量的意義:
(1)不觸及被量測目標即可測定其位置和形狀,
(2)可快速地在大范圍測區內進行點位測定,從而節省野外測量作業量,
(3)不受通視條件的限制,
(4)平差時,區域內部精度均勻,且不受區域大小的限制,
3.決議空中三角測量的目的:
(1)為測繪地形圖提供定向控制點和像點定向引數,
(2)測定大范圍內界址點的統一坐標,
(3)單元模型中大量地面點坐標的計算,
(4)決議近景攝影測量和非地形攝影測量,
4.決議空中三角測量的分類:
(1)按數學模型可分為:航帶法、獨立模型法、光束法,
(2)按平差范圍可分為:單模型法、航帶法、區域網法,
5.影像連接點的型別:
(1)明顯地物點
(2)標志點
(3)人工轉刺點
(4)儀器轉刺點
(5)數字影像相關轉點
6.像點坐標的系統誤差因素:
(1)底片變形
(2)攝影機物鏡畸變
(3)大氣折光
(4)地球曲率
7.航帶網法空中三角測量:首先在一個立體像對中,用連續法相對定向建立單個模型,然后把單個模型連接成航帶模型,以構成航帶自由網,再把航帶模型視為一個單元模型進行絕對定向,最后再進行非線性改正,就可以最終求得加密點的地面坐標了,
8.比例歸化系數k:指在進行模型連接時,使將后一個模型的比例尺歸化到前一個模型的比例尺中的系數,從而能建立全航帶統一的比例尺,k=(k1+k2+k3)/3,k1、k2、k3指立體像對中重疊部分上中下區域各取一個點的比例歸化系數,
9.航帶模型需要進行非線性改正的原因:在模型連接時誤差會傳遞、累積,而航帶網的絕對定向只能將整個航帶納入到地面攝影測量坐標系中,并不能改正航帶網的變形,
10.航帶模型非線性改正的基本原理:用多項式曲面來擬合、逼近復雜的變形曲面,利用提供的控制點與加密值之間的不符值,通過最小二乘擬合,使控制點處在擬合曲面上的變形值與實際相差最小,
11.航帶模型非線性改正式的系數:非線性改正是多項式曲面來擬合復雜的變形曲面的,非線性改正式通常可采用三次多項式來擬合,則系數有21個(需要21/3=7個平高控制點來求解);若采用2次多項式來擬合,則系數有15個(需要15/3=5個平高控制點來求解),
12.航帶網法區域網平差的步驟(作業流程):
(1)按單航帶模型法分別建立航帶模型,以取得各航帶模型點在本航帶統一的像空間輔助坐標系坐標,
(2)進行各航帶的絕對定向,
(3)計算重心坐標和重心化坐標,
(4)根據模型中控制點的加密坐標應與外業實測坐標相等以及相鄰航帶間的公共連接點應相等為約束條件,列出誤差方程,并用最小二乘準則平差計算,整體求解各航帶的非線性改正系數,
(5)用平差得到的非線性改正系數分別計算各模型點改正后的坐標值,
13.獨立模型法空中三角測量的作業流程:
(1)單獨法相對定向建立單個模型,獲取各模型的模型坐標,包括攝站點,
(2)利用相鄰模型的公共點和所在模型中的控制點,各單元模型分別做三維線性變換,按各自的條件列出誤差方程式和法方程式,
(3)建立全區域的改化法方程式,并按回圈分塊的方法求解,求得每個模型點的7個絕對定向元素,
(4)按平差后求得的7個絕對定向元素計算每個單元模型中待定點的坐標,若為相鄰模型的公共點,則取其均值作為最后結果,
14.光束法區域網空中三角測量的作業流程:
(1)獲取(每張像片的外方位元素和待定點坐標)的近似值,
(2)從每張像片上的控制點、待定點的像點坐標出發,按共線條件列出誤差方程式,
(3)逐點法化建立法方程式,按回圈分塊的方法先求出每張像片的外方位元素,
(4)按空間前方交會的方法求出待定點的地面坐標,若為相鄰像片的公共點,則取平均值作為最后結果,
15.三種區域網平差方法的比較:
(1)航帶網法區域網平差:數學模型為非線性多項式的改正公式,平差單元為一條航帶,觀測值為航帶的地面坐標,未知數為非線性多項式的改正系數,特點是方便、速度快、但精度不高,
(2)獨立模型法區域網平差:數學模型為空間相似變換式,平差單元為獨立模型,觀測值為模型的坐標,未知數為各模型空間相似變換式里的7個引數和待定點的地面坐標,特點是未知數較多,將平面和高程分開求解仍能得到嚴密平差的結果,
(3)光束法區域網平差:數學模型是共線條件方程,平差單位為單個光束,觀測值為像點坐標,未知數為每張像片的外方位元素和待定點的地面坐標,特點是邏輯最嚴密、已成為主流方法,但未知數較多、計算量較大,這也影響了求解速度,
16.GPS輔助空中三角測量:一種利用帶有GPS的攝影系統直接獲取攝影瞬間攝影中心的空間位置,從而可以極大地減少地面控制點的數目的技術,
17.機載POS系統對地定位:利用GPS獲取攝站點的位置資訊、利用IMU記錄航攝相機的角度變化資訊,從而直接解算出攝影瞬間的像片的6個外方位元素,這樣就可以無需地面控制點甚至無需空中三角測量工序而直接實作測圖或定位,
18.GPS輔助空中三角測量和機載POS系統的主要區別:前者只能獲取攝影瞬間 攝影中心的空間位置坐標,而后者不僅能獲取攝影瞬間 攝影中心的空間位置坐標,因其裝有慣性量測單元IMU,所以它還能獲取攝影瞬間 像片的姿態引數,
19.影響POS系統定向精度的因素:
(1)位置精度:包括GPS定位誤差、設備時間同步誤差、偏心分量測量誤差,
(2)角度誤差,
(3)內方位元素誤差,
(4)坐標系轉換誤差,
第七章 數字地面模型的建立及其應用
老師不講,略,
第八章 數字攝影測量基礎
1.灰度(也叫光學密度)D:阻光率取對數,即D = lg(F0/F),
2.采樣:對物體影像每隔一個間距Δ讀取一個點的灰度值的程序,
3.灰度量化:將像片上有可能出現的最大灰度范圍進行等分,分成若干個灰度級(通常為256級),當某個像素點的灰度值落在某個灰度級內時,就取該灰度值為這個像素點的新灰度值,灰度量化的目的是把所有像素點的灰度變為整數,以方便計算,
4.數字影像:數字影像的實質是一個規則排列的灰度格網序列,它只記錄采樣點的灰度值,
5.常用的重采樣方法:最鄰近像元法、雙線性內插法、雙三次卷積法,
6.基于灰度的數字影像相關:首先在左片上確定一個待定點,稱之為目標點,以該點為中心選取n×n的灰度矩陣為目標視窗(n為奇數),在右片上定出一個a×b的灰度矩陣(a>n,b>n)作為搜索區,以一個與目標視窗同樣形狀的搜索視窗去遍歷搜索區,在遍歷的程序中計算這兩個視窗的相似性測度,取相似性測度最高的搜索視窗的中心像元為目標點的同名像點,
7.幾種基本匹配演算法(相似性匹配測度):
(1)協方差法(越大越好)
(2)相關系數法(越大越好)
(3)相關函式法(越大越好)
(4)差平方和(越小越好)
(5)差絕對值和(越小越好)
8.VLL法的原理:已知A點的物方平面坐標,首先粗略估算出A點的高程范圍,然后在A點處設定一條鉛垂線,當A點沿著這條鉛垂線在它的高程范圍內上下移動時,總有一處位置,使得A點在左右像片上的構象為中心的目標視窗和搜索視窗的相關系數最高,則此時A點所在高程值即為A點的真實高程值,此時目標視窗和搜索視窗的中心像元即為同名像點,如下圖: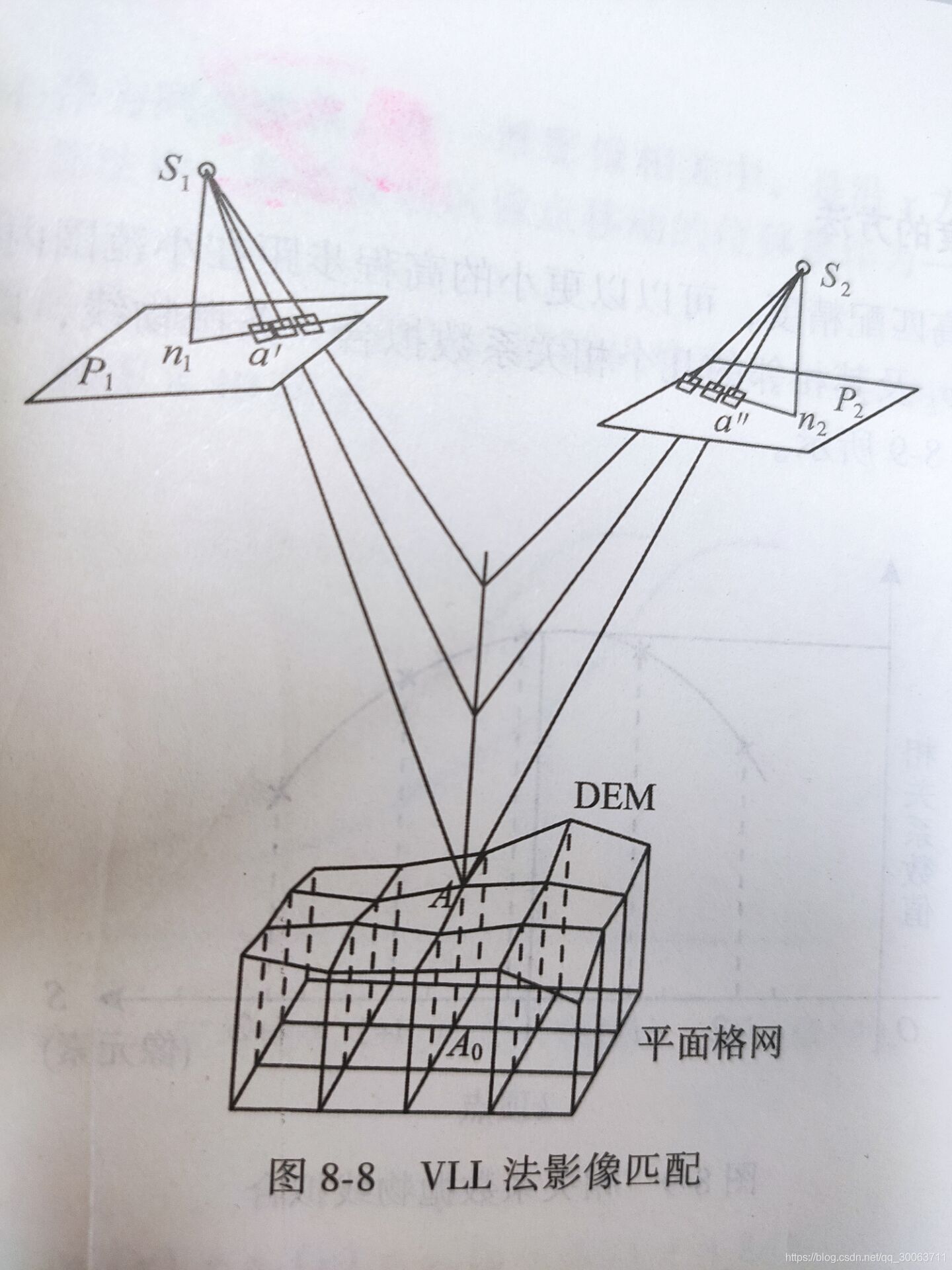
9.提高VLL法匹配精度的方法:
(1)減小高程迭代步長ΔZ,
(2)擬合出相似性測度的二次函式,用極值點對應的高程值來作為最后高程結果,
10.影像灰度的系統誤差來源:輻射畸變、幾何畸變,
11.一維最小二乘影像匹配:搜索視窗不斷地在搜索區移動一個整像素,在移動的程序中計算相關系數,以相關系數最高的視窗的中心像元為同名像點,且將搜索視窗的位移量作為一個引數引入到最小二乘影像相關演算法中,就可以最直接解算像點移位,
12.最小二乘匹配的思想:在影像匹配中引入輻射畸變和幾何畸變的引數,用最小二乘法求出這些引數,
13.二維最小二乘影像匹配的具體步驟:
(1)幾何變形改正,
(2)重采樣,
(3)輻射畸變改正,
(4)計算目標視窗和搜索視窗的相關系數,
(5)采用最小二乘影像相關,求解變形引數的改正值,
(6)計算變形引數,
(7)計算最佳匹配點位,
14.最小二乘影像匹配精度:
(1)相關系數越大,精度越高,
(2)信噪比越大,精度越高,
(3)紋理結構越明顯,精度越高,
15.特征匹配:指從從影像中提取到的特征為共軛物體,而將所提取的特征屬性或描述引數作為匹配物體,通過計算匹配物體的相似性匹配測度以實作共軛物體配準的影像匹配方法,
16.特征匹配的三大步驟:
(1)特征提取
(2)候選特征點的確定
(3)變換引數估計或最終的特征對應,
17.金字塔影像相關:從粗到精的相關策略,先低通進行初相關,找到同名點的粗略位置,再高通,找到精確位置,
18.提取特征的兩種分布模式:
(1)隨機分布,
(2)均勻分布,
19.基于點特征的影像匹配算子的基本原理:
(1)Moravec算子:考慮某一像素與周圍像素間的灰度差,以4個方向上具有最小-最大灰度方差的像素為特征點,
(2)Forstner算子:在影像中尋找具有最可能小且近似圓的誤差橢圓的像素作為特征點,
20.特征點的匹配順序:
(1)深度優先,
(2)廣度優先,
21.SIFT演算法:先找到尺度空間的極值點,然后用擬合函式的方法確定哪些是關鍵點,位置在哪,然后計算梯度,以最大的方向為主方向,再對兩幅影像進行對比,梯度最接近的就是匹配特征點,最后用RANSAC演算法糾錯,
22.SIFT演算法的特點:
(1)魯棒性,對氣候不同、光照強度不同、角度不同、比例尺不同等的像片也能比較準確地匹配出同名像點,
(2)多量性,少數物體可產生大量SIFT特征向量,
(3)獨特性,可以在大量資料中進行準確、快速的定位,
(4)拓展性,可以與其他形式的特征向量結合,
(5)運行速度快,
第九章 像片糾正與正射影像圖
老師不講,略,
第十章 攝影測量的外業作業
老師不講,略,
另,近十年出現的應用于攝影測量學的計算機技術
(是老師最后補充的內容,根據PPT總結)
1.深度學習(DL,Deep Learning):深度學習是機器學習的一種演算法,其特點是包含多隱層的人工神經網路結構,
2.卷積神經網路(CNN,Convolutional Neural Network):卷積神經網路是一種深度學習演算法,其通過區域感知野和引數共享降低引數數目,
3.回圈神經網路(RNN,Recurrent Neural Network):回圈神經網路是一類以序列資料為輸入,在序列的演進方向進行遞回且所有節點(回圈單元)按鏈式連接的遞回神經網路,
4.深度學習基本都是由三個步驟組成的:
(1)定義一組函式,
(2)計算函式優度,
(3)選擇最優函式,
喜歡點個贊,我會超開心(●’?’●)
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/246843.html
標籤:其他
下一篇:os1-8章重點復習