0. 自動控制原理緒論
自動控制理論是研究自動控制系統組成,進行系統分析設計的一般性理論,是研究自動控制程序共同規律的技術學科,
自動控制理論發展史
-
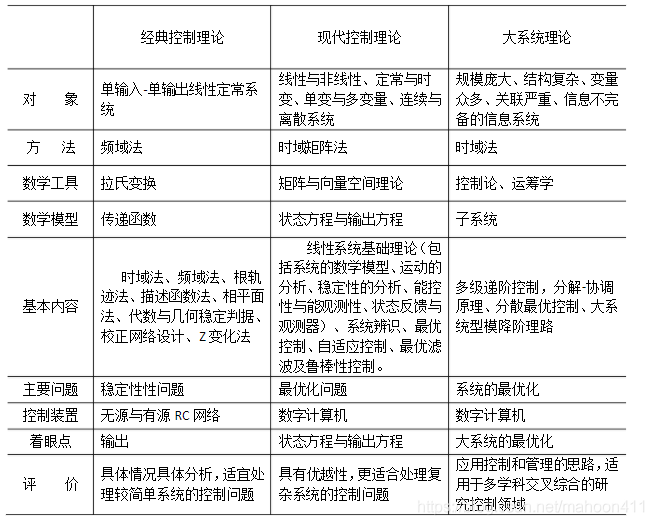
經典控制理論
時域法、復域法(根軌跡法)、頻域法等,
優點:可通過試驗方法建立數學模型,物理概念清晰,得到廣泛的工程應用,
缺點:只適應單變數線性定常系統,對系統內部狀態缺少了解,且復數域方法研究時域特性,得不到精確的結果, -
現代控制理論
線性系統、最優控制、系統辨識等,
總結:狀態空間方法屬于時域方法,其核心是最優化技術,它以狀態空間描述(實質上是一階微分或差分方程組)作為數學模型,利用計算機作為系統建模分析、設計乃至控制的手段,
優點:適應于多變數、非線性、時變系統, -
大系統控制理論
現代頻域方法、自適應控制理論和方法、魯棒控制方法、預測控制方法等,
總結:大系統理論是程序控制與資訊處理相結合的綜合自動化理論基礎,是動態的系統工程理論,它是一個多輸入、多輸出、多干擾、多變數的系統, -
智能控制理論
專家系統、模糊控制、神經網路控制等,
總結:智能控制的指導思想是依據人的思維方式和處理問題的技巧,解決那些目前需要人的智能才能解決的復雜的控制問題,
1. 自動控制的一般概念
自動控制就是:在無人直接參與下,利用控制裝置,使被控物件的某一個被控量按預定的給定量運行,
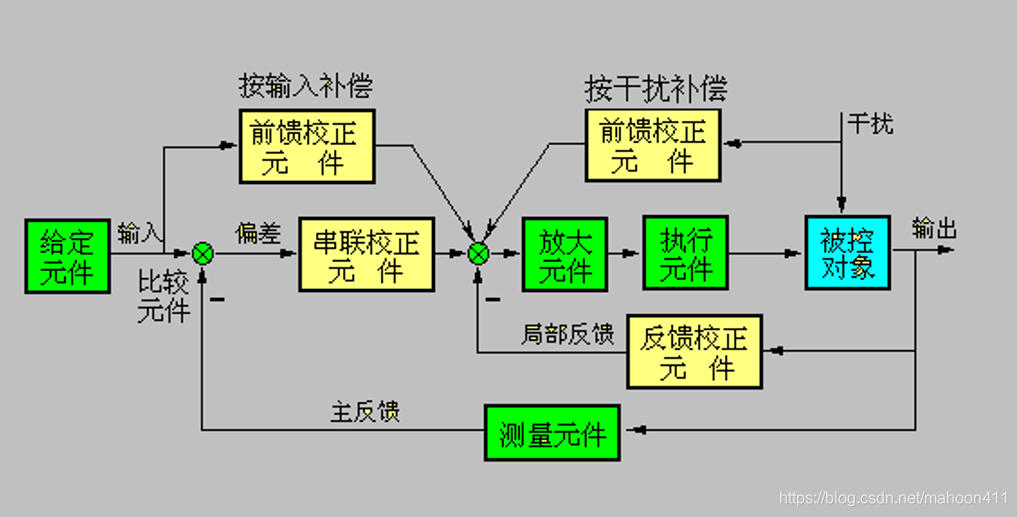
※要掌握由系統作業原理圖繪制方框圖的能力,
方框圖的五大要素:元部件、信號及傳遞方向、比較點、引出點、負反饋,
基本控制方式:開環控制、倍訓控制、復合控制,
- 倍訓控制系統的特點:系統內部存在反饋,信號流動構成倍訓路,偏差起調節作用,
- 復合控制:前饋控制+反饋控制,
負反饋原理:將系統的輸出信號引回輸入端,與輸入信號相比較,利用所得的偏差信號進行控制,達到減小偏差、消除偏差的目的,
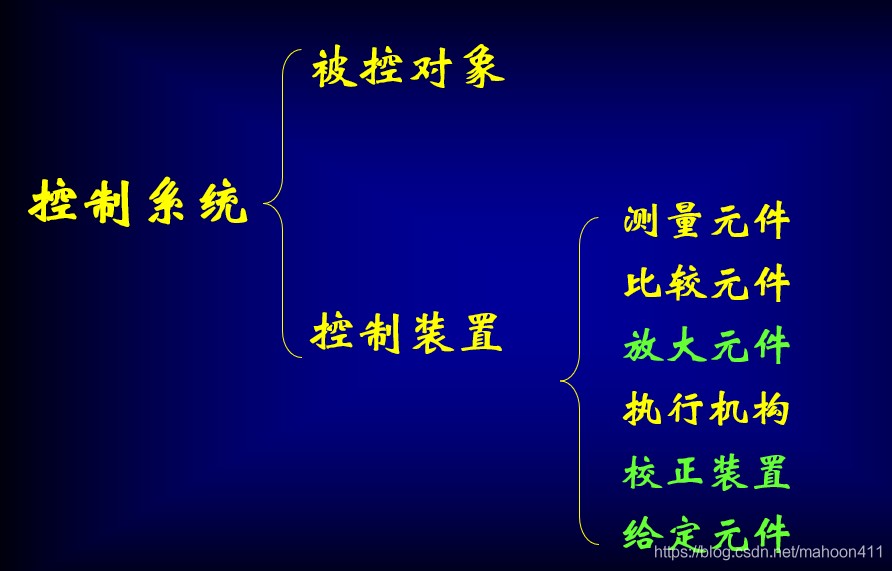
控制系統的組成:控制物件、控制裝置,(下圖的控制裝置中,字體為黃顏色的裝置是每個控制系統都要具備的,即測量元件、比較元件、執行機構)
控制系統的分類:
- 按給定信號的形式: 恒值系統 / 隨動(伺服)系統 / 程控系統
- 按是否滿足疊加原理:線性系統 / 非線性系統
- 按引數是否隨時間變化:定常系統 / 時變系統
- 按信號傳遞的形式:連續系統 / 離散系統
- 按輸入輸出變數的多少:單變數系統 / 多變數系統
對控制系統的基本要求:
- 穩:(基本要求)
要求系統要穩定, - 準:(穩態要求)
系統回應達到穩態時,輸出跟蹤精度要高, - 快:(動態要求)
系統階躍回應的過渡程序要平穩, 快速,
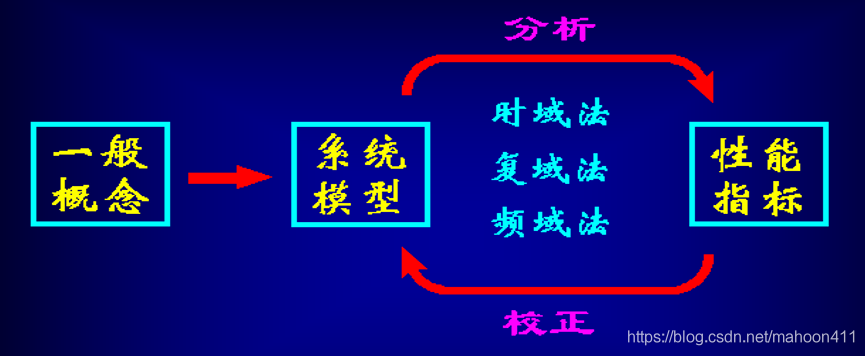
本門(經典)自動控制原理課程的體系結構:
自動控制原理的兩大任務,一個是認識系統,即分析系統,另一個是改造系統,即校正系統,認識與改造系統都是通過時域法、復域法(根軌跡法)、頻域法進行的,
2. 控制系統的數學模型
數學模型:描述系統輸入、輸出變數以及內部各變數之間關系的數學運算式
建模方法:
- 決議法(機理分析法)→適用于白盒子系統
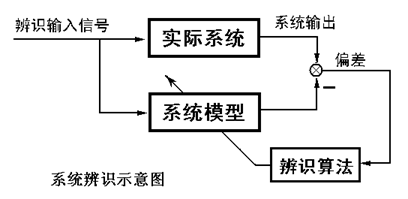
根據系統作業所依據的物理定律列寫運動方程, - 實驗法(系統辨識法)→適用于黑盒子/灰盒子系統
給系統施加某種測驗信號,記錄輸出回應,并用適當的數學模型去逼近系統的輸入輸出特性,
| 時域模型 | 復域模型 |
|---|---|
| 微分方程 | 傳遞函式 |
2.1 控制系統時域數學模型
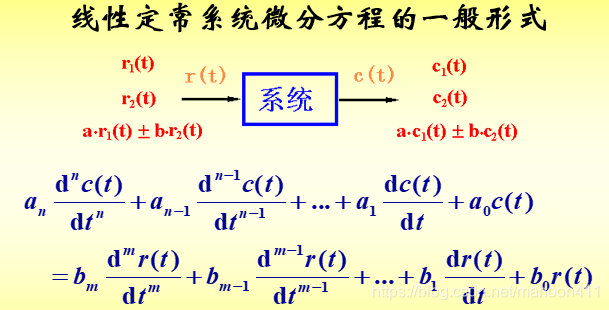
首先研究線性定常系統,
- 判斷系統是不是線性的,觀察輸入輸出變數,如果滿足等式兩邊只有輸入輸出變數本身或其各階導數,而沒有常數項、交叉乘積項、變數的高階項,那么這個系統就是線性系統,
- 判斷系統是不是定常的,觀察輸入輸出變數的系數,如果系數不隨時間變化(即系數是常數),那么這個系統就是定常系統,
非線性系統也可在小變化范圍內線性化,然后化為線性定常系統微分方程進行求解,
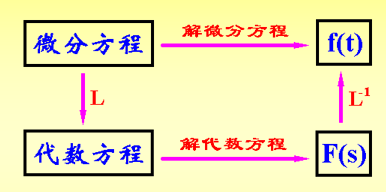
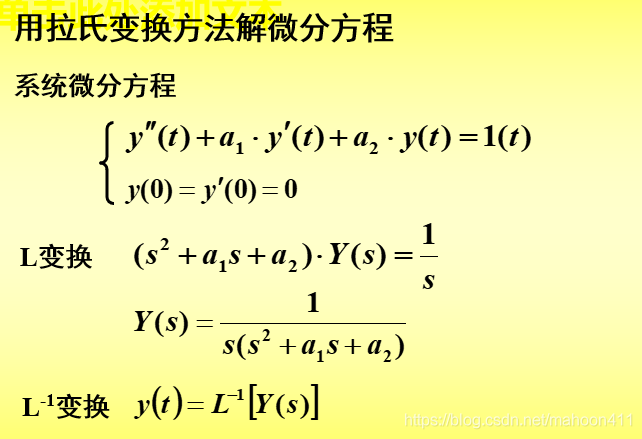
借助拉普拉斯變換,可將時域微分方程化為復域代數方程進行求解,然后再借助拉氏反變換,變換到時域,最終完成對時域微分方程的求解,
但這并不是拉氏變換的主要用途,拉氏變換最主要的用途是,建立起自動控制原理中最重要的數學模型,就是系統的復域數學模型——傳遞函式,
2.2 控制系統復域數學模型
影響系統回應的因素有三個:
- 輸入ur(t),規定ur(t)為階躍信號1(t),這是因為階躍信號最容易實作,比如開關,又因為階躍信號對于一個系統來講,是一個比較嚴苛的輸入條件,如果這個系統跟蹤階躍信號跟蹤的效果很好,那么跟蹤其他信號應該問題不大,
- 初始條件,規定為零初始條件,即系統在t小于0時,系統的輸入輸出及它們的各階導數均為零,因為現實中,大多數系統在接收外界激勵之前,都是處于相對平衡狀態的,
- 系統的結構引數,一旦輸入及初始條件都統一規定之后,那么系統回應的性能指標,最終就取決于系統自身的結構引數了,即自身的特性決定了系統性能,
2.2.1 傳遞函式
傳遞函式定義:在零初始條件下,線性定常系統輸出量拉氏變換與輸入量拉氏變換之比,

與此同時,要注意,系統的時域數學模型:微分方程,不要求一定要在零初始條件下,因此,若題目中給出系統的傳遞函式,讓求解此系統在非零初始條件下的回應,就需要先利用題目給出的傳遞函式進行拉氏反變換,求出微分方程,再將此微分方程進行拉氏變換(此時拉氏變換就要帶上初始條件)進行求解,
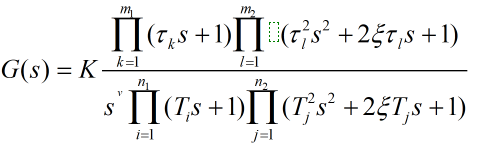
傳遞函式的一般形式為;

可將一般形式的傳遞函式化為兩類標準型:
-
首1標準型:把分子分母變數的最高次冪的系數提出來,寫成K*,即可化為首1標準型,注意要保證變數s的系數是正值,
-
尾1標準型:把分子分母的尾項都提取出來,保證尾項為1,提取出的常數項相乘后寫成K,即可化為尾1標準型,注意要保證變數s的系數是正值,
尾1標準型中的K叫做增益,
傳遞函式的性質:
- G(s)是復函式;
- G(s)只與系統自身的結構引數有關;
- G(s)與系統微分方程直接關聯;
- G(s) = L[ k(t) ];
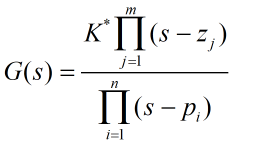
其中k(t)為系統的單位脈沖回應,即系統的傳遞函式與系統的單位脈沖回應互為拉氏變換對, - G(s) 與 s 平面上的零極點圖相對應,
s平面即自變數s的取值范圍,G(s)的分子多項式對應的根叫做系統的零點,分母多項式對應的根叫做系統的極點,
因此由G(s)可繪制零極點圖,由零極點圖也可還原出不包含K*的G(s),
傳遞函式的局限性:
- 原則上不反映非零初始條件時系統回應的全部資訊;
因為傳遞函式是建立在零初始條件下的,但如果想求非零初始條件時系統回應的資訊也可以求得:把傳遞函式進行拉氏反變化,變換為微分方程,然后再把微分方程通過拉氏變換(代入初始條件)進行求解, - 適合于描述單輸入/單輸出系統;
由傳遞函式的定義可知,傳遞函式只能是一個輸出的拉氏變換對一個輸入的拉氏變換的比值, - 只能用于表示線性定常系統,
因為系統如果是非線性或者時變的話,那么雖然可以求得微分方程的拉氏變換,但無法匯出C(s)/R(s),即無法定義系統的傳遞函式,
2.2.2 典型環節
自動控制系統中的元部件有很多種,比如機械、電氣、化工、航空航天等許多領域的元部件,作業原理都不相同,但可以將它們對應的傳遞函式抽象出來,它們可能有相同形式的傳遞函式,環節指的就是具有相同形式傳遞函式的元部件的分類,將環節再次抽象,即為典型環節,
典型環節:由元部件抽象出來的傳遞函式可以看成是有限個基本單元的組合,這些基本單元就稱為典型環節,
- 不同的元部件可以有相同的傳遞函式,
- 若輸入輸出變數選擇不同,同一部件可能有不同的傳遞函式,
- 任一傳遞函式都可看做典型環節的組合,
下圖列出了所有典型環節,
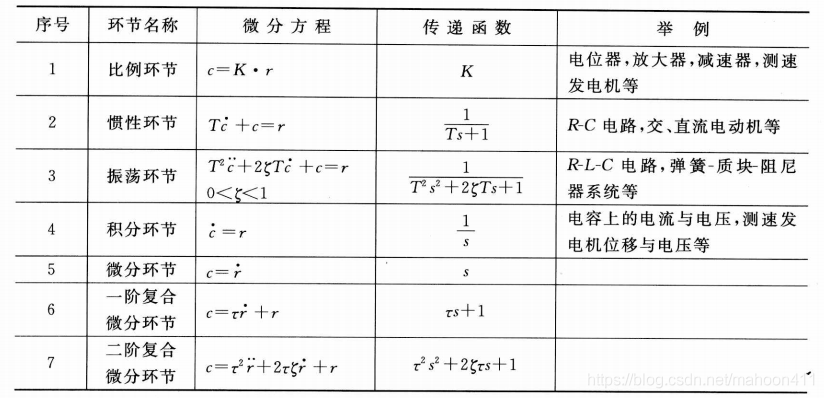
需要注意的是:實際中的系統都是因果系統,都具有慣性,只有給系統輸入信號之后,系統才會產生輸出,因此,這種系統抽象出來的傳遞函式,一般都是分母的階數高于分子的階數,因此上面列出的七個典型環節中,后三個微分環節,沒有實際的物理系統與之對應,
并且在建立系統傳遞函式時,還需要注意負載效應,一定要在系統能夠正常作業的環境下,來建立系統的傳遞函式,
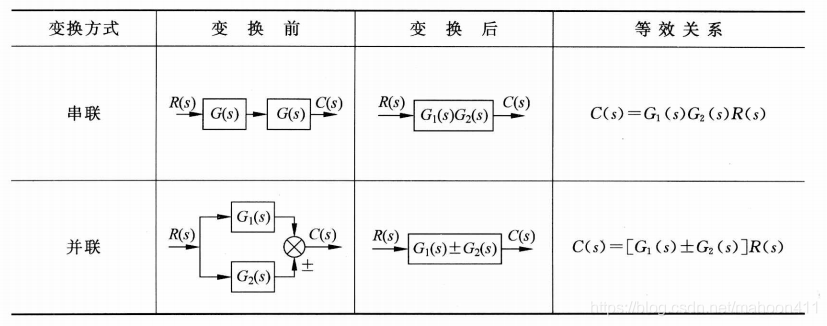
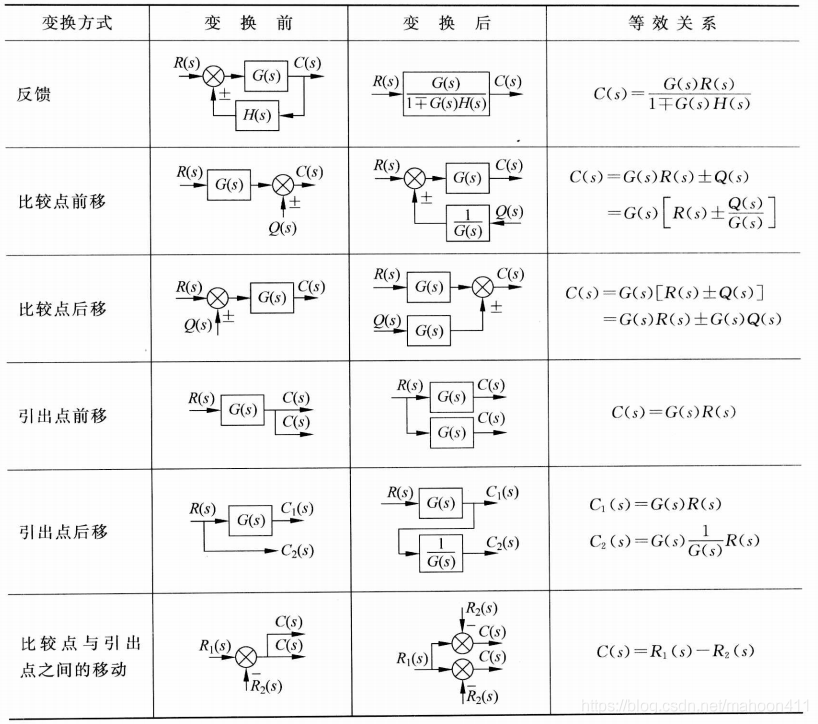
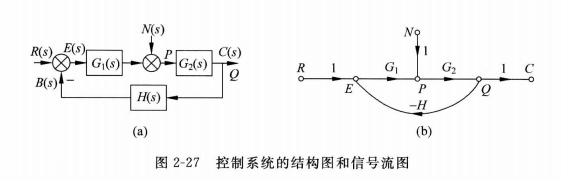
2.3 控制系統的結構圖及其等效變換
2.3.1 結構圖等效變換規則
2.4 控制系統的信號流圖
掌握結構圖和信號流圖的相互轉換,
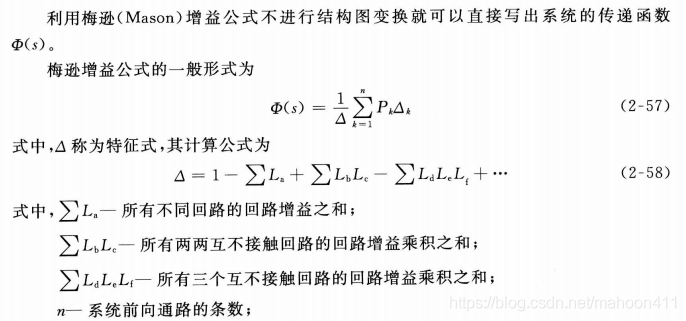
Mason增益公式:

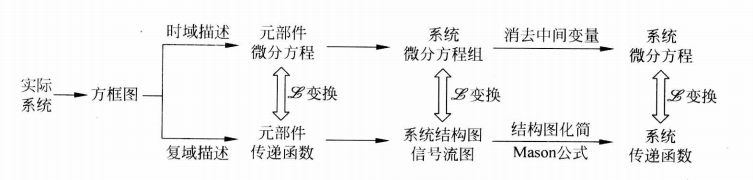
總體來講,系統模型及其建立程序如下圖所示,
2.5 控制系統的傳遞函式
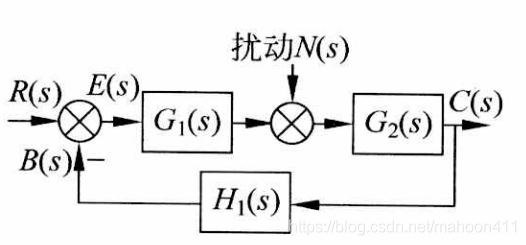
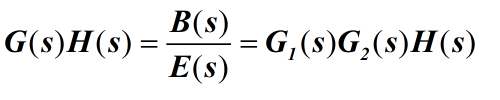
說明一下,系統的開環傳遞函式一般用G(s)表示,倍訓傳遞函式一般用Φ(s)表示,
2.5.1 開環傳遞函式
首先要注意的是,開環傳遞函式指的不是開環系統的傳遞函式,開環傳遞函式是針對倍訓系統而言的,
開環傳遞函式是把倍訓系統的主反饋通路打斷,將前向通路與反饋通路上的傳遞函式乘到一起,
把開環傳遞函式化為尾1標準型,得到的常數項K稱為開環增益,
還是以上述系統為例,定義此系統的倍訓傳遞函式有四種:
輸入R(s)對輸出C(s),輸入R(s)對偏差E(s),擾動N(s)對輸出C(s),擾動N(s)對偏差E(s),
2.5.2 輸入R(s)作用下的倍訓傳遞函式
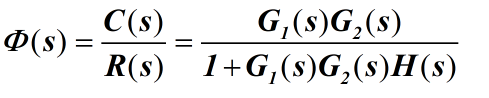

注意到,分母有一部分就是系統的開環傳遞函式,即,分母是1+開環傳遞函式,
2.5.3 擾動N(s)作用下的誤差傳遞函式


2.5.4 系統的總輸出C(s)及總誤差E(s)


3. 附錄:拉普拉斯變換
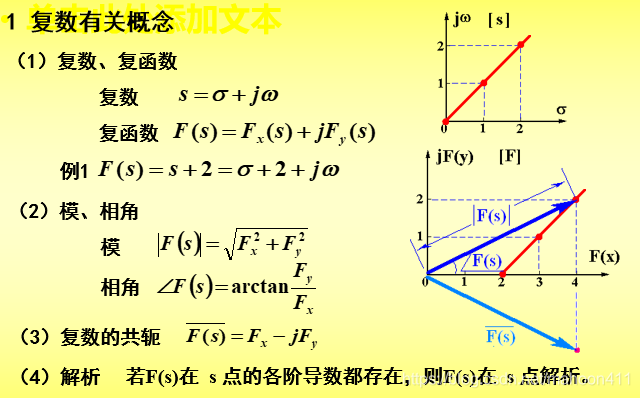
3.1 復數與復函式
對于復函式來說,其自變數為復數s,需要用一個二維復平面(s平面)去表述;因變數為F(s),也是復數,同樣需要一個二維復平面(F平面)去表述,
因此完整描述一個復函式,需要兩個二維復平面(s平面和F平面)去表述,如下圖兩個紅線所示
復函式的模如下圖藍線所示,其對應的相角如下圖所示,
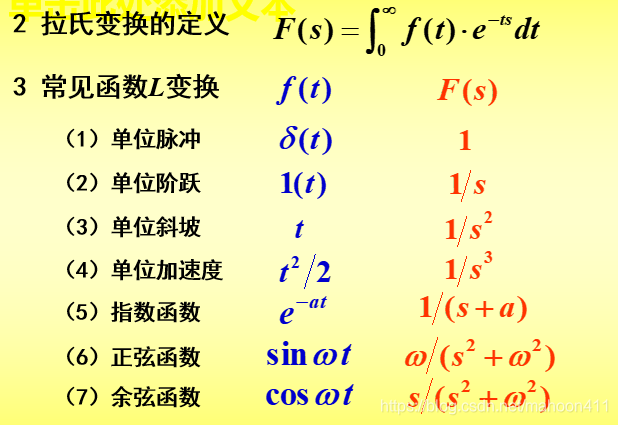
3.2 拉氏變換

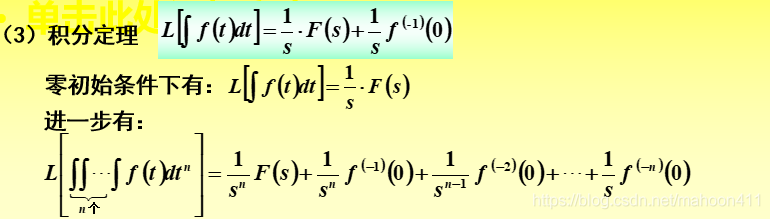
微分定理中,可以把復域s·F(s)中前面的s類比到時域中f(t)的一個微分算子d,即df(t)→s·F(s),

那么對時域中的f(t)求n階導,相當于在復域中對F(s)乘n個s,再減去一系列的初始條件,包括初始位置、初始速度、初始加速度等等,若f(t)初條件都為0,則其拉氏變換為snF(s),



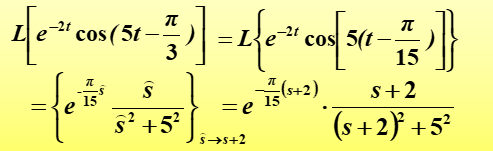
實位移定理與復位移定理的綜合應用例題:先應用實位移定理,再應用復位移定理,
初值定理用于只知道象函式F(s),而不知道原象f(t),又要計算f(t)的初值的情況,

終值定理通常用來計算系統的穩態誤差,

3.3 拉氏反變換

但是一般來說,應用反演公式去求拉氏反變化比較困難,
因此實際應用中,通常使用查表法去求解拉氏反變換,即先把F(s)拆分成表中存在的常見函式的形式,再按照表進行拉氏反變換,
把F(s)拆分的程序就叫做分解部分分式法,可以通過試湊法、系數比較法、留數法進行實作,常用的是留數法,拉氏反變換的難點也在于如何把F(s)分解為部分分式,

3.3.1 模態(振型)
例如有一個四階系統,

將其進行求解得到系統單位脈沖回應c(t)為:

(系統回應即是系統的模態的線性組合)
可以看出,此系統的四個模態分別為e-2t,e-8t,e-tsin2t,e-tcos2t,
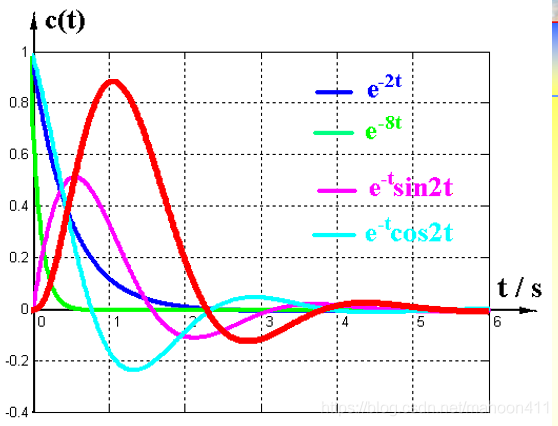
此系統最終的回應就是這四個模態通過不同權值進行疊加后得到的,
3.3.2 留數法分解部分分式
注意使用留數法的前提是,F(s)一定要是有理真分式,即n>m,
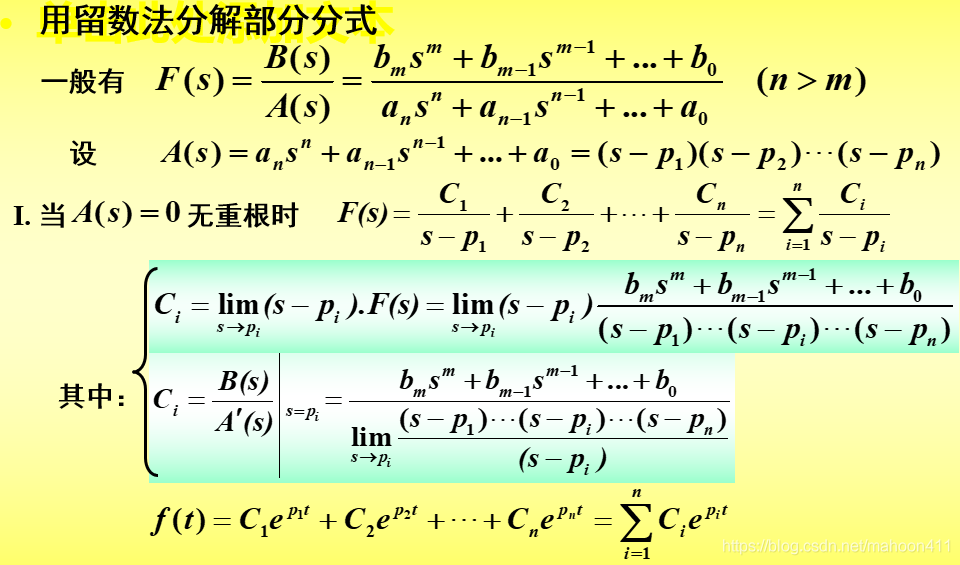
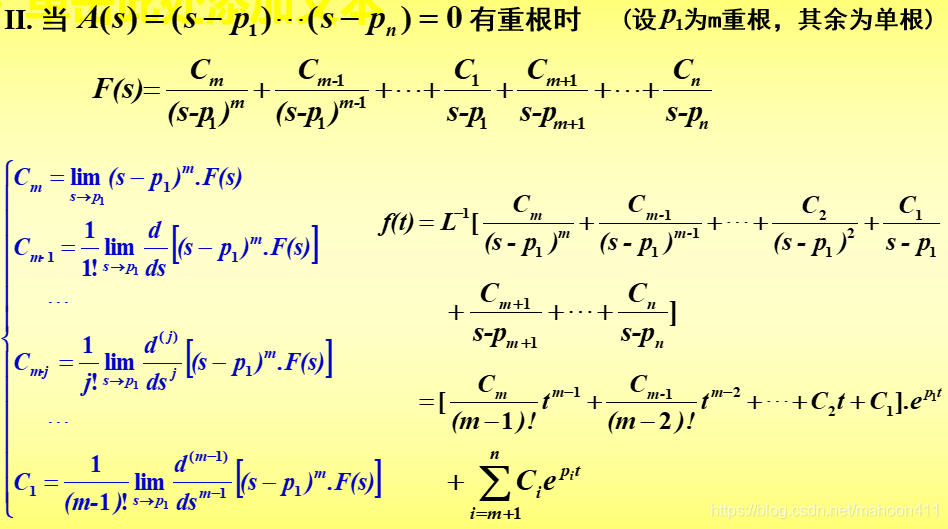
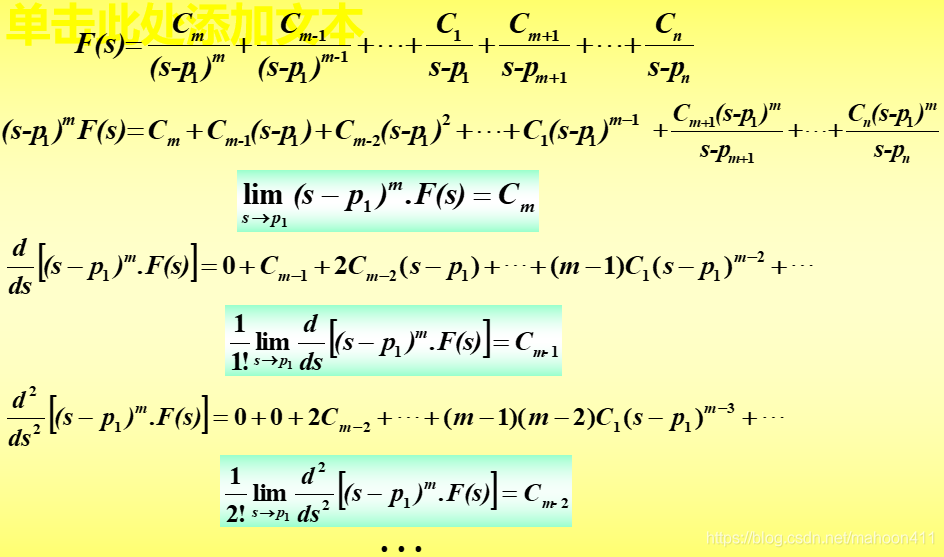
上述公式記憶起來比較困難,因此也采用如下方法進行留數的求解:
如下圖所示,先在等式兩邊同時乘以(s-p1)m,這時候觀察等式右邊可知,除了Cm項,其余各項都含有(s-p1)這一項,因此令等式兩邊的s等于p1,等式右邊就只剩下了Cm項,等式左邊就變成了求極限的一個式子,這時求出等式左邊的極限,Cm就求出來了,
接著求Cm-1,還是先在原等式兩邊同時乘以(s-p1)m,然后再對等式兩邊求一次導數,這樣等式右邊的Cm就被消去,而Cm-1就變為常數項了,接下來用求Cm的方法就可以求出Cm-1了,
同理,可以求出所有的留數,
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/250140.html
標籤:其他
上一篇:多人如何通過小程式上傳照片、視頻、素材、文章,然后點贊投票評選?
下一篇:淺談 綴點成線 問題