專案:
硬體平臺:
win10 x64
Visual Studio 2019
Intel Realsense SDK 2.0
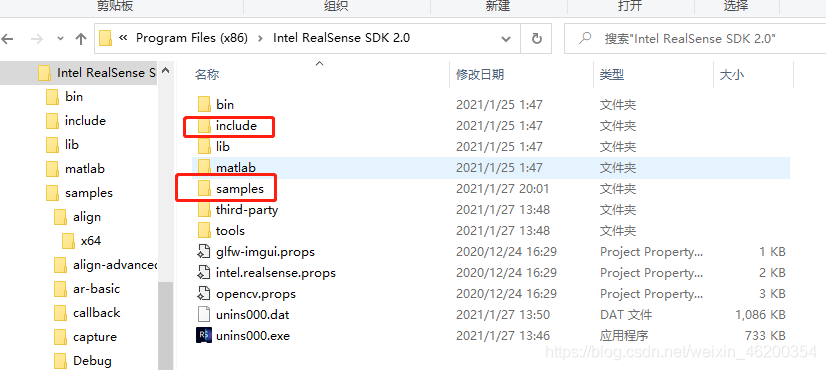
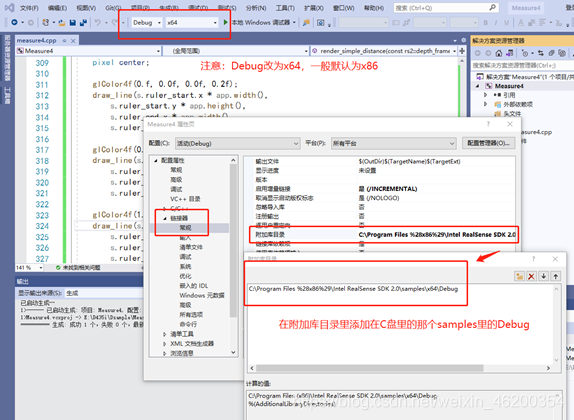
這是在官網上下載的例程,默認安裝在C盤,include是頭檔案,samples是例子
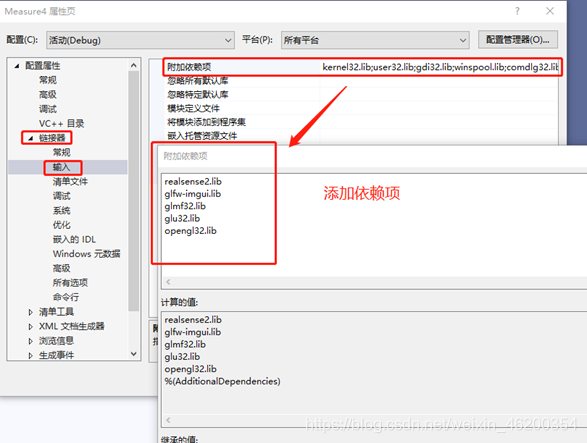
先說明:Hello第一個例子添加的依賴項只需要realsense2.lib就行,其他的例程則需要添加更多的依賴項,否則會報錯
問題描述:
在VS新建工程這里坑比較多,以下是手把手教建工程,如果已經配置成功的可略過不看哦~
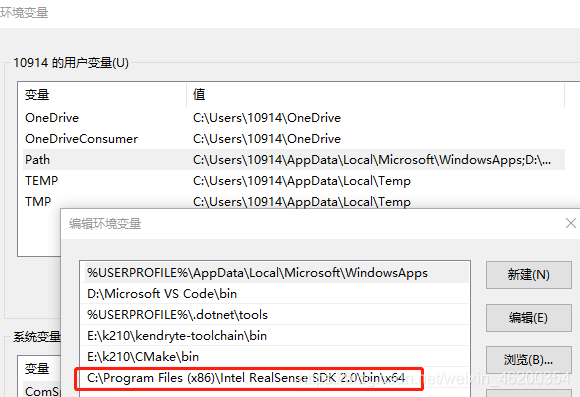
1.環境變數配置(設定完之后,建議電腦重啟一下,不過問題不大,看實際情況)
電腦——屬性——高級系統設定——環境變數——系統變數——Path——如下圖:
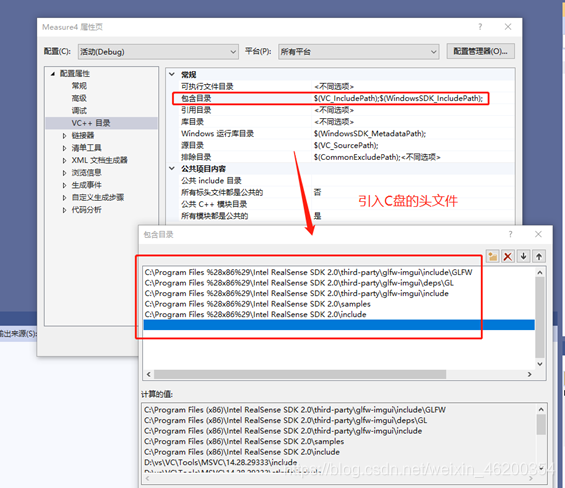
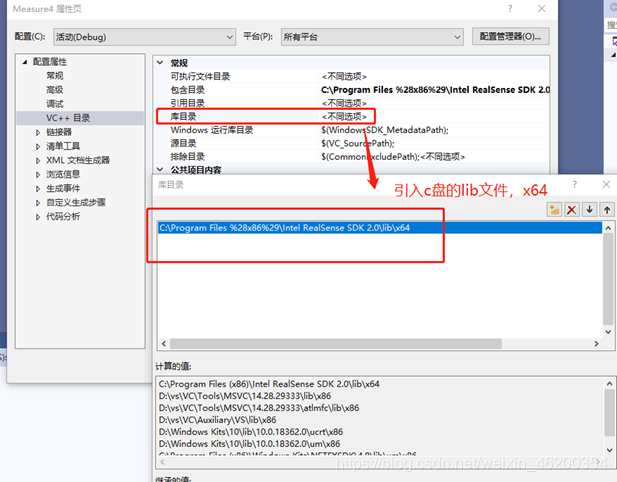
2.打開vs,新建一個工程,我把這個工程放在E盤,然后在解決方案資源管理器,右鍵打開屬性
引入頭檔案和庫目錄+添加依賴項,完成一切后,連上相機就可以啦~

原因分析:
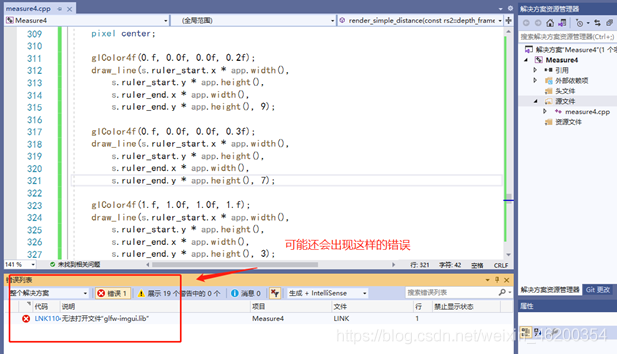
大量的頭檔案和依賴項,沒有的話,靠一個main函式跑不了,路徑什么的一定要設定好才行,不過每次新建都得引入一次是真的煩人,可以試下在其他的環境下跑吧,
關于用深度測兩點間的距離:
本教程介紹了使用深度資料測量現實距離的簡單方法,
注意:測量真實物件的尺寸是深度相機的明顯應用之一,
該示例并不是要成為合適的度量工具,而是要展示關鍵概念,
使用更好的演算法,可以大大提高測量結果,
在本教程中,您將學習如何:
在空間上使顏色流與深度對齊(與rs-align中的深度與顏色對齊相反)
利用后處理來處理丟失或嘈雜的深度資料
在2D像素和3D空間中的點之間轉換
利用多核來并行化資料流
使用OpenGL在深度上方疊加顏色
#include<librealsense2/rs.hpp>
#include<librealsense2/rsutil.h>
#include "example.hpp"
#include<math.h>
//#include<corecrt_math_defines.h> //該頭檔案包含M_PI的定義
#include<queue>
#include<unordered_set>
#include<map>
#include<thread>
#include<atomic>
#include<mutex>
#define _USE_MATH_DEFINES
#define M_PI 3.14159265358979323846 // pi
using pixel = std::pair<int, int>;
//Distance 3D 用于計算兩個像素之間的真實3D距離
float dist_3d(const rs2::depth_frame& frame, pixel u, pixel v);
//Toggle helper類將用于渲染兩個按鈕
//控制尺子的邊緣
struct toggle
{
toggle() : x(0.f), y(0.f) {}
toggle(float xl, float yl)
: x(std::min(std::max(xl, 0.f), 1.f)),
y(std::min(std::max(yl, 0.f), 1.f))
{}
//從[0,1]空間移動到特定幀的像素空間
pixel get_pixel(rs2::depth_frame frm) const
{
int px = x * frm.get_width();
int py = y * frm.get_height();
return{ px, py };
}
void render(const window& app)
{
glColor4f(0.f, 0.0f, 0.0f, 0.2f);
render_circle(app, 10);
render_circle(app, 8);
glColor4f(1.f, 0.9f, 1.0f, 1.f);
render_circle(app, 6);
}
void render_circle(const window& app, float r)
{
const float segments = 16;
glBegin(GL_TRIANGLE_STRIP);
for (auto i = 0; i <= segments; i++)
{
auto t = 2 * M_PI * float(i) / segments;
glVertex2f(x * app.width() + cos(t) * r,
y * app.height() + sin(t) * r);
glVertex2f(x * app.width(),
y * app.height());
}
glEnd();
}
//這個輔助函式用于查找最接近滑鼠游標的按鈕
//因為只比較這個距離,可安全的跳過sqrt
float dist_2d(const toggle& other) const
{
return pow(x - other.x, 2) + pow(y - other.y, 2);
}
float x;
float y;
bool selected = false;
};
//在主執行緒和GLFW事件之間共享應用狀態
struct state
{
bool mouse_down = false;
toggle ruler_start;
toggle ruler_end;
};
//注冊UI事件的helper函式
void register_glfw_callbacks(window& app, state& app_state);
// Simple distance是3D點之間的經典畢達哥拉斯距離
//這個距離忽略了物件的拓撲結構,并且可以通過兩者
//通過空氣和固體
void render_simple_distance(const rs2::depth_frame& depth,
const state& s,
const window& app);
int main(int argc, char* argv[]) try
{
//顏色和深度幀的OpenGL紋理t
texture depth_image, color_image;
/
//深度處理管道
//著色器用于可視化深度資料
rs2::colorizer color_map;
//使用黑到白的彩色地圖
color_map.set_option(RS2_OPTION_COLOR_SCHEME, 2.f);
//Decimation filter減少資料量(同時保留最好的樣本)
rs2::decimation_filter dec;
//如果演示太慢,確保你在release中運行(-DCMAK_BUILD_TYPE=Release)
//但你也可增加下面的引數來減少深度(降低質量)
dec.set_option(RS2_OPTION_FILTER_MAGNITUDE, 2);
//定義視差域和視差域的轉換
rs2::disparity_transform depth2disparity;
rs2::disparity_transform disparity2depth(false);
//定義空間濾波器(邊緣保持)
rs2::spatial_filter spat;
//啟用hole-filling
//填洞是一種侵略性的啟發式方法,它多次得到錯誤的深度
//但是,這個演示程式不是用來處理漏洞的
spat.set_option(RS2_OPTION_HOLES_FILL, 5);//5是所有的0管道
//定義時間過濾器
rs2::temporal_filter temp;
//空間對齊所有流到深度視口
//(1)通常depth有更寬的FOV,只需要depth來做這個演示
//(2)不想引入新的漏洞
rs2::align align_to(RS2_STREAM_DEPTH);
//接下來,我們為深度+顏色流配置相機管道:
//宣告Realsende管道,封裝實際的設備和傳感器
rs2::pipeline pipe;
rs2::config cfg;
//啟動預設深度
cfg.enable_stream(RS2_STREAM_DEPTH);
//對于顏色流,設定格式為RGBA
//允許在深度框架上混合顏色框架
cfg.enable_stream(RS2_STREAM_COLOR, RS2_FORMAT_RGBA8);
auto profile = pipe.start(cfg);
//我們的目標是生成沒有任何孔的深度,因為這些孔將對我們的演算法造成直接的問題,
//減少像素丟失的最好方法是讓硬體來完成,
//D400攝像機具有我們可以利用的高密度預設,
auto sensor = profile.get_device().first<rs2::depth_sensor>();
//將設備調至D400立體相機的高精度預設定值
if (sensor && sensor.is<rs2::depth_stereo_sensor>())
{
sensor.set_option(RS2_OPTION_VISUAL_PRESET, RS2_RS400_VISUAL_PRESET_HIGH_ACCURACY);
}
auto stream = profile.get_stream(RS2_STREAM_DEPTH).as<rs2::video_stream_profile>();
//創建一個簡單的OpenGL視窗用于渲染
window app(stream.width(), stream.height(), "RealSense Measure Example");
//定義應用程式狀態和定位標尺按鈕
state app_state;
app_state.ruler_start = { 0.45f, 0.5f };
app_state.ruler_end = { 0.55f, 0.5f };
register_glfw_callbacks(app, app_state);
//初始化后處理后,幀將流入這個佇列
rs2::frame_queue postprocessed_frames;
//bool值將通知作業執行緒結束
std::atomic_bool alive{ true };
//視頻處理執行緒將從相機中獲取幀,應用后處理并將結果發送給主執行緒進行渲染
//它接收同步的(但不是空間對齊的)對,并輸出同步的和對齊的對
std::thread video_processing_thread([&]() {
while (alive)
{
//從管道中獲取幀并將它們發送給處理
rs2::frameset data;
if (pipe.poll_for_frames(&data))
{
//首先使幀空間對齊
data = data.apply_filter(align_to);
//抽取將降低深度影像的結果,封閉小孔,加速演算法
data = data.apply_filter(dec);
//確保遠處的物件按比例過濾
data = data.apply_filter(depth2disparity);
//切換到視差域
data = data.apply_filter(spat);
//應用時間濾波
data = data.apply_filter(temp);
//如果在視差域,切換回深度
data = data.apply_filter(disparity2depth);
//應用彩色地圖來顯示深度
data = data.apply_filter(color_map);
//在主執行緒中發送結果幀
postprocessed_frames.enqueue(data);
}
}
});
rs2::frameset current_frameset;
while (app)//應用程式仍然活著?
{
//獲取最新可用的后處理框架集
postprocessed_frames.poll_for_frame(¤t_frameset);
if (current_frameset)
{
auto depth = current_frameset.get_depth_frame();
auto color = current_frameset.get_color_frame();
auto colorized_depth = current_frameset.first(RS2_STREAM_DEPTH, RS2_FORMAT_RGB8);
glEnable(GL_BLEND);
//使用Alpha通道進行混合
glBlendFunc(GL_SRC_ALPHA, GL_ONE_MINUS_SRC_ALPHA);
//首先渲染彩色深度影像
depth_image.render(colorized_depth, { 0, 0, app.width(), app.height() });
//渲染顏色幀(因為我們選擇了RGBA格式,FOV中的像素會顯示為透明)
color_image.render(color, { 0, 0, app.width(), app.height() });
//渲染簡單的畢達哥拉斯距離
render_simple_distance(depth, app_state, app);
// Render the ruler
app_state.ruler_start.render(app);
app_state.ruler_end.render(app);
glColor3f(1.f, 1.f, 1.f);
glDisable(GL_BLEND);
}
}
//通知執行緒完成并等待它們完成
alive = false;
video_processing_thread.join();
return EXIT_SUCCESS;
}
catch (const rs2::error& e)
{
std::cerr << "RealSense error calling " << e.get_failed_function() << "(" << e.get_failed_args() << "):\n " << e.what() << std::endl;
return EXIT_FAILURE;
}
catch (const std::exception& e)
{
std::cerr << e.what() << std::endl;
return EXIT_FAILURE;
}
/
//使用類get_distance功能可以獲取以米為單位的距離depth_frame,
//get_distance過度呼叫可能會導致性能下降,因為編譯器無法跨模塊邊界進行優化,因此DEPTH_UNITS直接從中讀取選項depth_sensor并將其用于將原始深度像素轉換為米可能是有益的,
//將所有內容放在一起會產生相當冗長的dist_3d功能:
float dist_3d(const rs2::depth_frame& frame, pixel u, pixel v)
{
float upixel[2]; // From pixel(像素)
float upoint[3]; // From point (in 3D)(點,3D)
float vpixel[2]; // To pixel
float vpoint[3]; // To point (in 3D)
//將像素復制到陣列中(以匹配rsutil簽名)
upixel[0] = u.first;
upixel[1] = u.second;
vpixel[0] = v.first;
vpixel[1] = v.second;
//查詢幀的距離
//注意:這個可以被優化
//不建議對每個像素都呼叫API(因為編譯器不能行內這些)
//然而,在這個例子中,它不是瓶頸之一
auto udist = frame.get_distance(upixel[0], upixel[1]);
auto vdist = frame.get_distance(vpixel[0], vpixel[1]);
//在3D中從像素到點的反投影
rs2_intrinsics intr = frame.get_profile().as<rs2::video_stream_profile>().get_intrinsics(); // Calibration data
rs2_deproject_pixel_to_point(upoint, &intr, upixel, udist);
rs2_deproject_pixel_to_point(vpoint, &intr, vpixel, vdist);
//計算兩點之間的歐氏距離
return sqrt(pow(upoint[0] - vpoint[0], 2) +
pow(upoint[1] - vpoint[1], 2) +
pow(upoint[2] - vpoint[2], 2));
}
void draw_line(float x0, float y0, float x1, float y1, int width)
{
glPushAttrib(GL_ENABLE_BIT);
glLineStipple(1, 0x00ff);
glEnable(GL_LINE_STIPPLE);
glLineWidth(width);
glBegin(GL_LINE_STRIP);
glVertex2f(x0, y0);
glVertex2f(x1, y1);
glEnd();
glPopAttrib();
}
void render_simple_distance(const rs2::depth_frame& depth,
const state& s,
const window& app)
{
pixel center;
glColor4f(0.f, 0.0f, 0.0f, 0.2f);
draw_line(s.ruler_start.x * app.width(),
s.ruler_start.y * app.height(),
s.ruler_end.x * app.width(),
s.ruler_end.y * app.height(), 9);
glColor4f(0.f, 0.0f, 0.0f, 0.3f);
draw_line(s.ruler_start.x * app.width(),
s.ruler_start.y * app.height(),
s.ruler_end.x * app.width(),
s.ruler_end.y * app.height(), 7);
glColor4f(1.f, 1.0f, 1.0f, 1.f);
draw_line(s.ruler_start.x * app.width(),
s.ruler_start.y * app.height(),
s.ruler_end.x * app.width(),
s.ruler_end.y * app.height(), 3);
auto from_pixel = s.ruler_start.get_pixel(depth);
auto to_pixel = s.ruler_end.get_pixel(depth);
float air_dist = dist_3d(depth, from_pixel, to_pixel);
center.first = (from_pixel.first + to_pixel.first) / 2;
center.second = (from_pixel.second + to_pixel.second) / 2;
std::stringstream ss;
ss << int(air_dist * 100) << " cm";
auto str = ss.str();
auto x = (float(center.first) / depth.get_width()) * app.width() + 15;
auto y = (float(center.second) / depth.get_height()) * app.height() + 15;
auto w = stb_easy_font_width((char*)str.c_str());
//為文本標簽繪制黑色背景
glColor4f(0.f, 0.f, 0.f, 0.4f);
glBegin(GL_TRIANGLES);
glVertex2f(x - 3, y - 10);
glVertex2f(x + w + 2, y - 10);
glVertex2f(x + w + 2, y + 2);
glVertex2f(x + w + 2, y + 2);
glVertex2f(x - 3, y + 2);
glVertex2f(x - 3, y - 10);
glEnd();
//繪制白色文本標簽
glColor4f(1.f, 1.f, 1.f, 1.f);
draw_text(x, y, str.c_str());
}
//實作按鈕的拖放行為:
void register_glfw_callbacks(window& app, state& app_state)
{
app.on_left_mouse = [&](bool pressed)
{
app_state.mouse_down = pressed;
};
app.on_mouse_move = [&](double x, double y)
{
toggle cursor{ float(x) / app.width(), float(y) / app.height() };
std::vector<toggle*> toggles{
&app_state.ruler_start,
&app_state.ruler_end };
if (app_state.mouse_down)
{
toggle* best = toggles.front();
for (auto&& t : toggles)
{
if (t->dist_2d(cursor) < best->dist_2d(cursor))
{
best = t;
}
}
best->selected = true;
}
else
{
for (auto&& t : toggles) t->selected = false;
}
for (auto&& t : toggles)
{
if (t->selected) *t = cursor;
}
};
}
我們使用glBlendFunc顏色Alpha通道在深度上疊加對齊顏色(流必須具有一定格式RGBA才能正常作業),
此示例說明了一個簡短而復雜的處理流程,每個執行緒的速率略有不同,它們都需要同步但彼此之間不必阻塞,
這是通過使用執行緒安全frame_queue的作為同步原語和rs2::frame參考計數來跨執行緒進行物件生存期管理來實作的,
注釋可能表達的不太準確,可去官網下載原始碼,自己翻譯~
第一次寫,主要是想讓大家遇見這么沒有什么技術性可言的坑時能順利跳過~
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/254001.html
標籤:其他
上一篇:矩陣乘法快速冪
下一篇:2020博客之星評選收官詞