文章目錄
- 寫在前面
- 1?設計目標與問題分解
- 1.1 設計目標
- 1.2 問題分解
- 2?解決思路
- 2.1 信源編碼和解碼部分
- 2.2 信道編碼和解碼部分
- 2.3 噪聲信道部分
- 2.4 聲音信號識別部分
- 2.5 控制器部分
- 3?實作程序及每步實作結果
- 3.1 信源和信道編碼模塊
- 3.2 調制解調模塊
- 3.3 噪聲模塊
- 3.4 聲音信號處理模塊
- 3.5 控制模塊
- 3.6 系統整體實作
寫在前面
在本篇中將利用MATLAB設計一個遠程聲控小車系統并仿真,整體難度并不大,關鍵要理清資訊的傳輸程序,理解信源和信道編碼的意義等等,在課堂上學到的香農資訊論等內容都是偏向于理論方面且比較抽象,親自動手進行設計對這些理論的理解還是有蠻大的幫助的,
如果你對信通或電子科學方面感興趣或是正在進行這方面的本科學習,可以去看一下我整理的這篇對資訊與電子方向部分本科專案的總結(持續更新中),也許某些課程或是科研專案的總結能對你有所幫助,
1?設計目標與問題分解
1.1 設計目標
完成遠程聲控小車系統設計與實作,需要采集語音控制信號并在適當壓縮后發出,通過噪聲信道傳輸,在小車接收端進行接收識別,進而控制小車在平面上運動,
1.2 問題分解
該目標可以分為以下幾步進行設計:
- 采集聲音信號,并對聲音指示信號進行一定的壓縮,即選擇合適的編碼方式進行信源編碼;
- 為了減小傳輸程序中噪聲的影響,需要選擇合適的編碼方式進行信道編碼并進行調制;
- 需要設計噪聲信道,在調制后的資訊內加入噪聲;
- 需要在接收端接收信號并進行解調、信道解碼、信源解碼,重新將其轉換成聲音指示信號;
- 需要進行聲音控制信號型別的識別,并將聲音控制信號轉換為相應的數字指示信號;
- 需要設計小車的控制系統,能根據指示信號做出反應并且保證系統具有可觀能控性;
2?解決思路
根據問題分解,可設計流程圖如下,
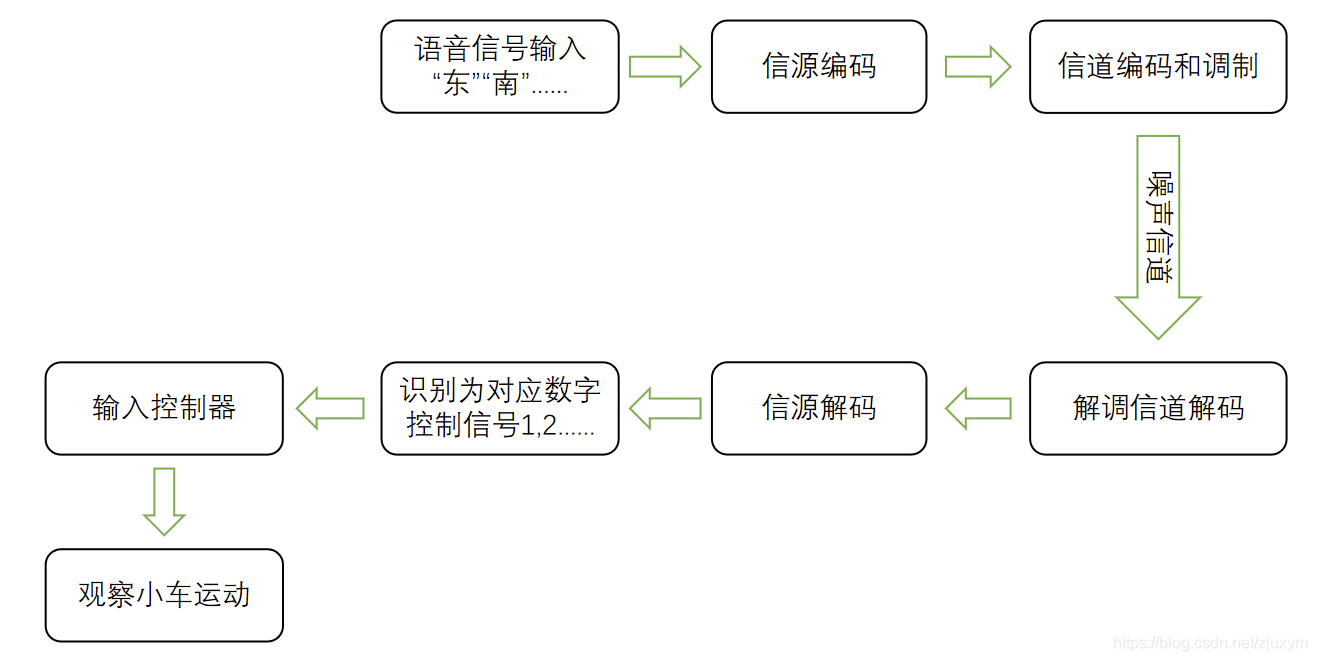
接下去將使用MATLAB軟體進行實作,進行分步處理,
2.1 信源編碼和解碼部分
為了對輸入的訊息進行適當壓縮,要選用合適的編碼方式,本次設計中對信號采用PCM的A律13折線法,
PCM(Pulse Code Modulation)脈沖編碼調制是數字通信的編碼方式之一,主要程序是對語音等模擬信號采樣使其離散化后將抽樣值按分層單位四舍五入取整量化,同時將抽樣值按一組二進制碼來表示抽樣脈沖的幅值,A律13折線法即為將y軸等分成8份,而x軸按1/2比逐次縮小化取值,總共連成8個轉折點,由于第一個點斜率不需要考慮,因此只考慮7點,算上y軸左側就有14點,同時最左側和最右側的線段斜率相同,因此只需考慮13點為量化標準,
由于采用電腦仿真,因此在讀取檔案時已經完成了語音信號的采樣,只需要進行幅值量化即可,同時對信號的幅值進行量化的這一程序也可以看作是對源資訊的壓縮,因為量化后表示某個小數所需要的二進制碼位元數大概率會減小很多,
2.2 信道編碼和解碼部分
為了方便,本次設計采用3位重復編碼,即1->111,0->000,此時可計算得編碼速率為1/3,可以對1bit進行糾錯,
信道解碼如下表,
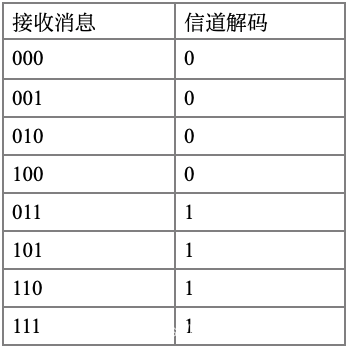
可見此信道編碼方式只能檢測一位錯誤,當三位中有兩位或以上產生錯誤時結果將出錯,會影響最終解碼,
2.3 噪聲信道部分
對于噪聲信道部分,由于缺乏相應的設備,只能通過MATLAB來仿真噪聲信道,通過將白噪聲加入傳輸信號來模擬;
2.4 聲音信號識別部分
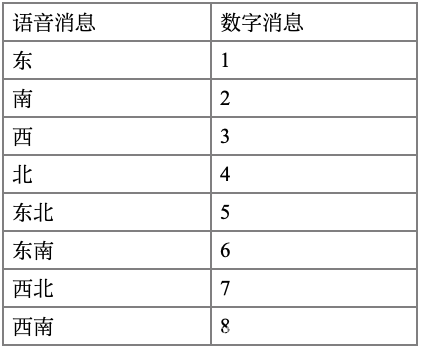
對于輸入的音頻信號,可以利用MATLAB內部函式來計算聲音特征,并與先前存盤的標準音頻進行比對,將相似度最高的一項作為配對結果,將其轉化為該項所對應的訊息,完成聲音控制信號到數字控制信號的轉換,其中語音訊息和數字信號對照表如下,
2.5 控制器部分
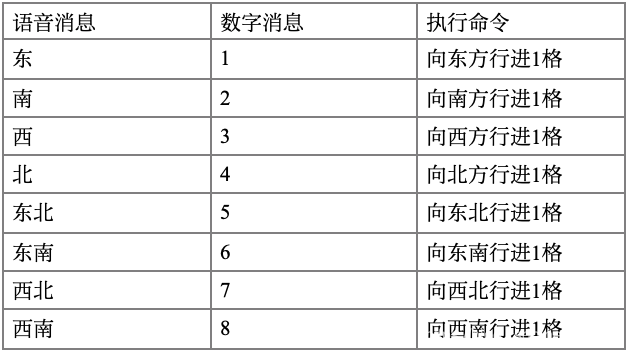
控制系統也由MATLAB模擬,通過輸出相應的結果來查看控制效果,用平面內的所有整數坐標點作為小車的活動區域,小車當前所處狀態即為當前坐標,可以設計聲控小車的語音訊息和對應執行命令如下,
能控性證明
顯然,由以上的命令表可知,小車可以前往平面內任意整數坐標位置,也可以從任意初始位置經過一系列操作后仍能回到原位置,即證明了該系統是能控的,
能觀性證明
輸入將以規定運動軌跡的方式來控制小車運動,因此可以通過當前輸入以及小車最終所處位置來反推出初始狀態,即根據輸入從終點開始反向繪制運動軌跡就可以找到初始位置,故該系統為能觀的,
3?實作程序及每步實作結果
3.1 信源和信道編碼模塊
按照解決思路內的原理可完成PCM編碼的MATLAB代碼,如果覺得比較困難的話可以參考這篇文章《基于 MATLAB 的 PCM 編碼解碼實作》,信道編碼的實作則相對比較簡單,在輸入的信號中添加冗余項即重復三位,解碼時每隔三位識別和是否大于2即可,
考慮到音頻檔案在MATLAB內讀取時會自動被采樣為離散的數字信號,因此在測驗時的輸入設定為:xm4a=2*rand(1,100)-1;%隨機產生(-1,1)的數字序列,部分測驗代碼和結果截圖如下,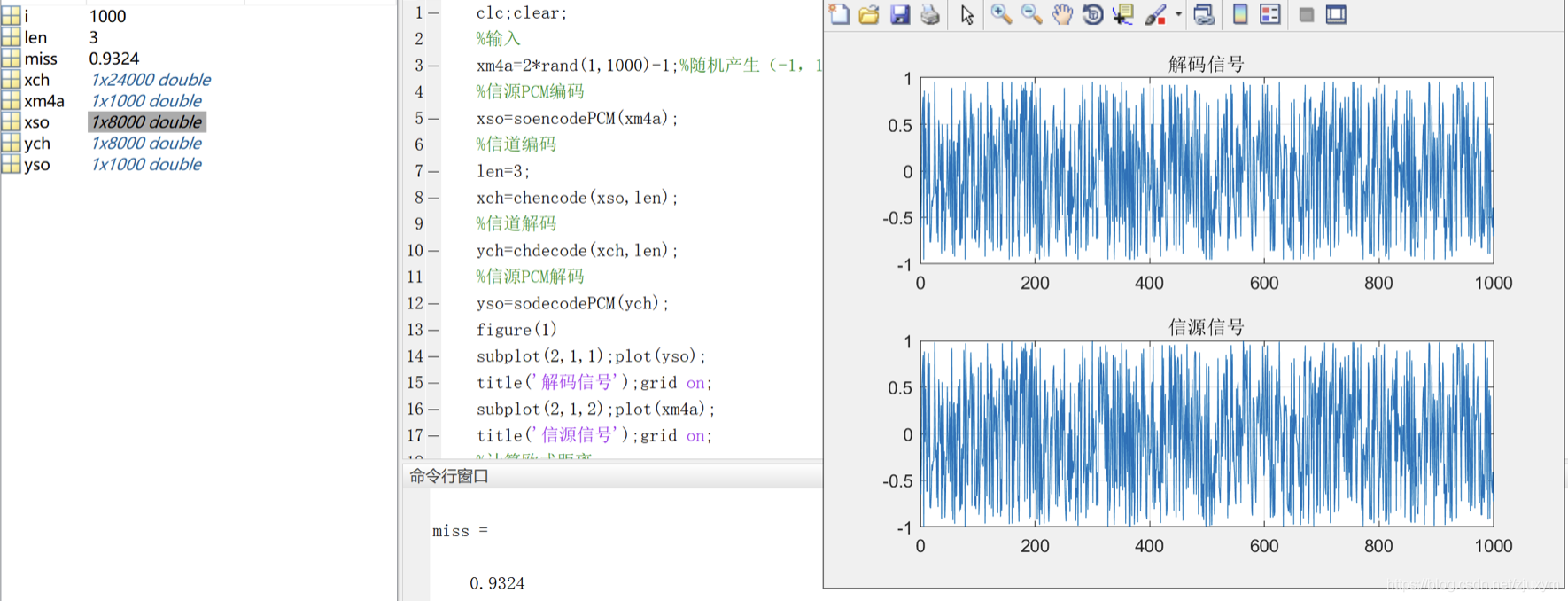
可見信源和信道的編碼和解碼均正常進行,其中miss代表信源和解碼信號的歐氏距離,從中可見前后信號差距不大,體現該編碼方式失真度較低,并且由對信號的幅度值進行了量化,因此起到了很好的壓縮效果,便于傳輸,信源和信道的編碼解碼設計成功,
3.2 調制解調模塊
此處將采用QPSK調制,由于信道編碼后的序列為二進制,為充分發揮QPSK效果,需要將其進行兩兩分組從而轉為四進制,此時可以利用reshape函式將信道編碼后的序列的維度從1*n轉為(n/2)*2,再利用bi2de函式將每一行的兩個二進制碼轉為10進制,即可完成二-四進制間的轉換,之后使用pskmod和pskdemod函式進行QPSK調制與解調,再轉回二進制碼序列,
具體模塊的MATLAB代碼如下,
%QPSK調制
x=bi2de((reshape(xch,2,length(xch)/2))');
yout = pskmod(x,4);
%QPSK解調
yin=pskdemod(yout,4);
ydein=reshape(de2bi(yin,2)',1,length(yin)*2);
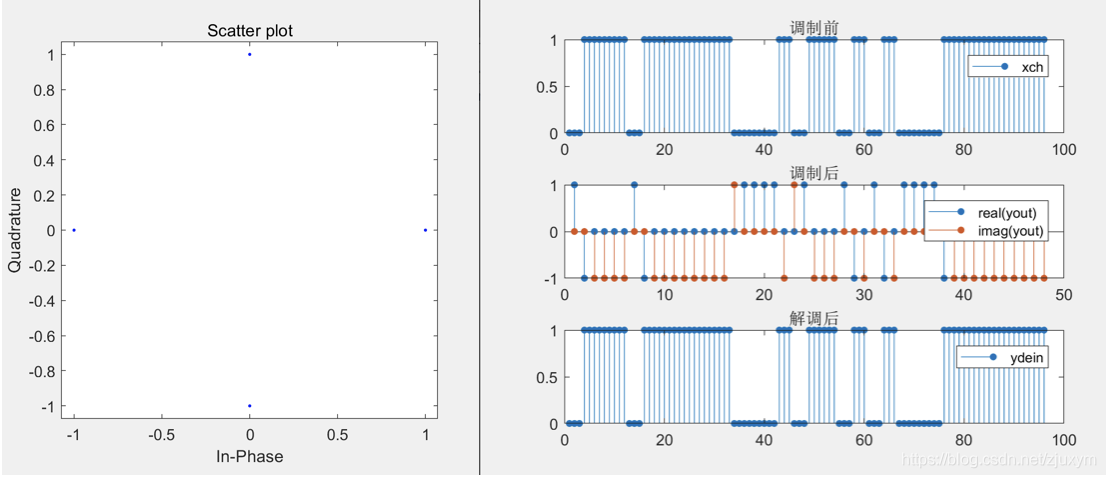
測驗結果如下,左圖為星座圖,右圖為調制和解調調制信號的對比,可見調制與解調程序正常進行,結果正確,
3.3 噪聲模塊
該部分可以直接采用MATLAB內部awgn函式來模擬,此時即可將噪聲加入進行測驗,測驗代碼和結果如下,
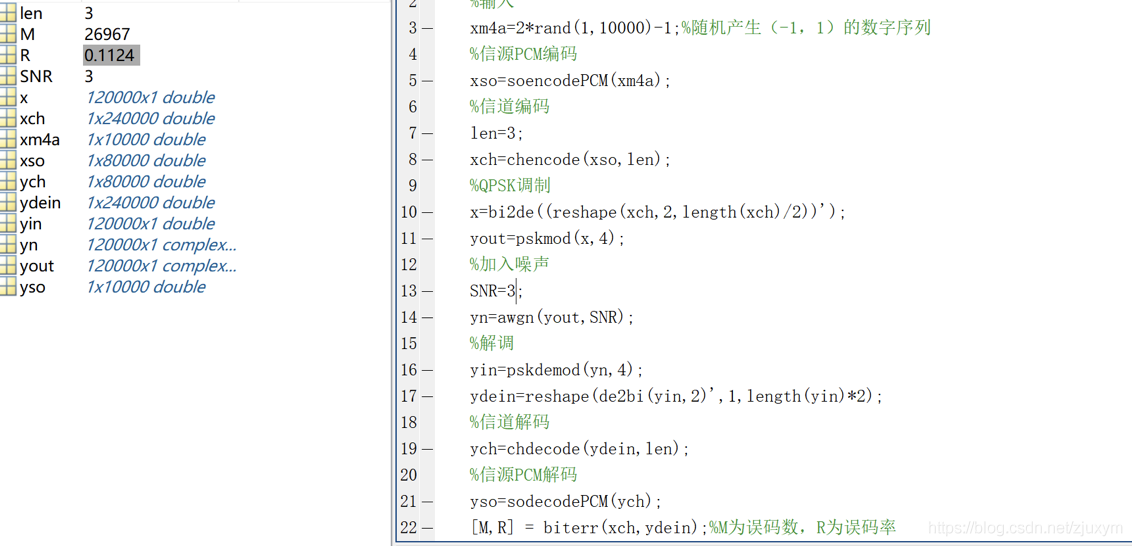
圖中左側作業區的M代表誤碼數,R代表誤碼率,從中可以看出,對于隨機生成的這10000個訊息,經過信源和信道編碼后變為24000bits的二進制信號,該二進制在通過信噪比為3dB的噪聲信道后,有26967bits受噪聲影響出錯了,因此錯誤率為11.24%,會對最后的解碼有一定影響,可見大多數信號在經過該噪聲信道后仍能保持正確的資訊,
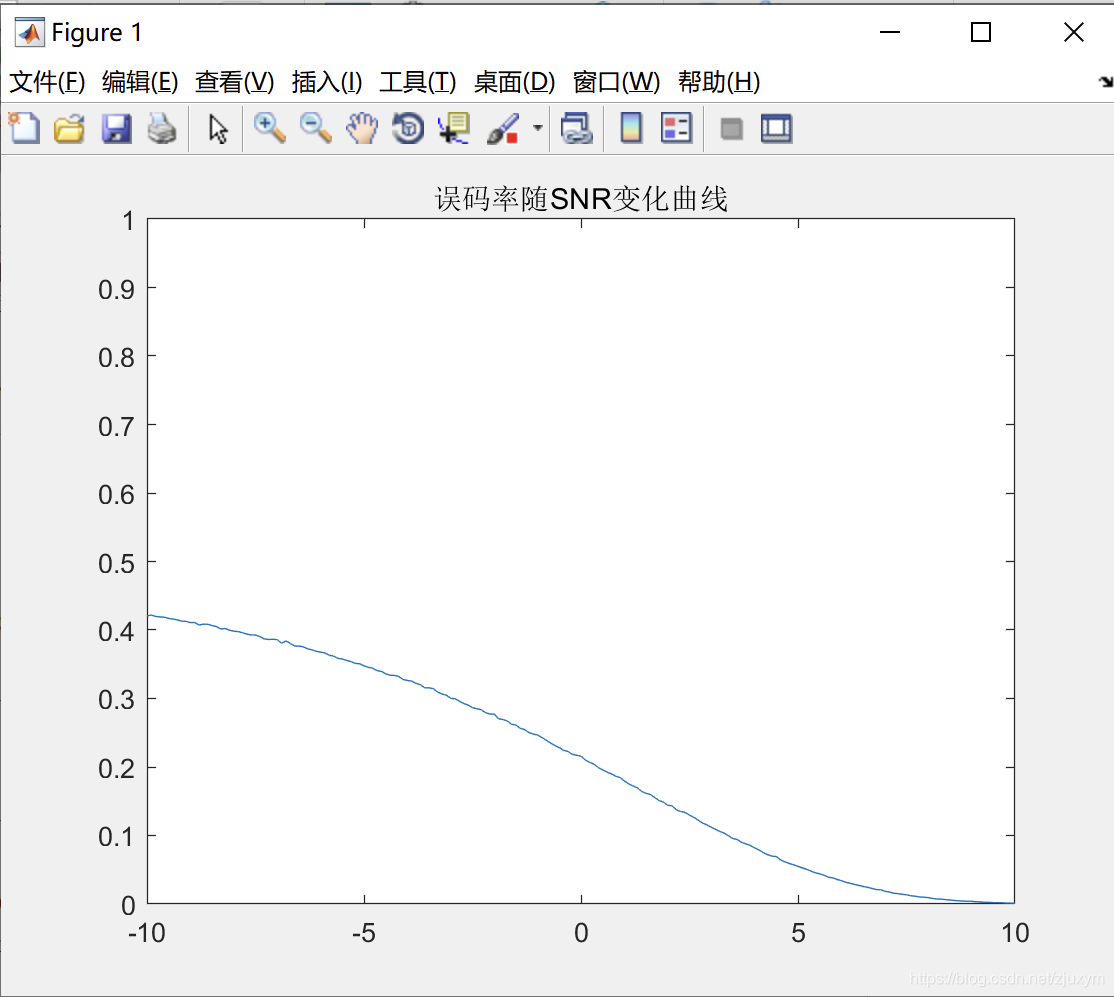
同時針對不同信噪比進行分析,作出如下圖象,可見隨著信噪比的提升,錯誤率逐漸下降至趨于0,與理論情況相符合,并且在信噪比10dB時已經幾乎不會出錯,
至此,對資訊傳輸程序的設計與實作部分已成功完成,接下來是處理,
3.4 聲音信號處理模塊
該部分最關鍵的是要進行語音識別,具體實作如下,
先錄制幾段標準聲音檔案作為對輸入音頻進行配對用的音頻信號,并存盤在電腦內,
采集聲音信號為m4a檔案,利用MATLAB內部audioread()函式來進行聲音-數字信號的轉換,其后利用MATLAB的工具箱voicebox內的melcepst函式來計算輸入音頻的語音特征梅爾頻率倒譜系數(MFCC),此處voicebox不是MATLAB安裝時自帶的,需要另行下載,
當輸入為單個音頻控制信號時,用dtw函式來計算輸入信號MFCC與先前存盤的標準聲音檔案的MFCC的差距,將兩者作為dtw函式的兩個輸入,輸出的值越小則說明匹配度越高,并選擇能使得dtw輸出最小的一個標準聲音檔案與輸入配對,至此,語音識別完成,需要注意的是,dtw的輸入必須維度相同,因此要對音頻進行長度上的對齊,
在完成語音識別后,即可將輸入音頻轉化為與所匹配的標準音頻所對應的訊息,
當輸入為多個音頻控制信號時,只需將其在時域上進行一段段的劃分,分別進行MFCC的計算和與標準音頻的匹配,即可完成對多個音頻控制信號的轉化,
下面以“東”,“南”,“西”,“北”的音頻為例演示語音識別模塊:
檔案2為“東”,檔案1為“東”的標準聲音檔案,檔案4為“西”,檔案3為“西”的標準聲音檔案,檔案6為“南”,檔案5為“南”的標準聲音檔案,檔案8為“北”,檔案7為“北”的標準聲音檔案,MATLAB主體代碼如下,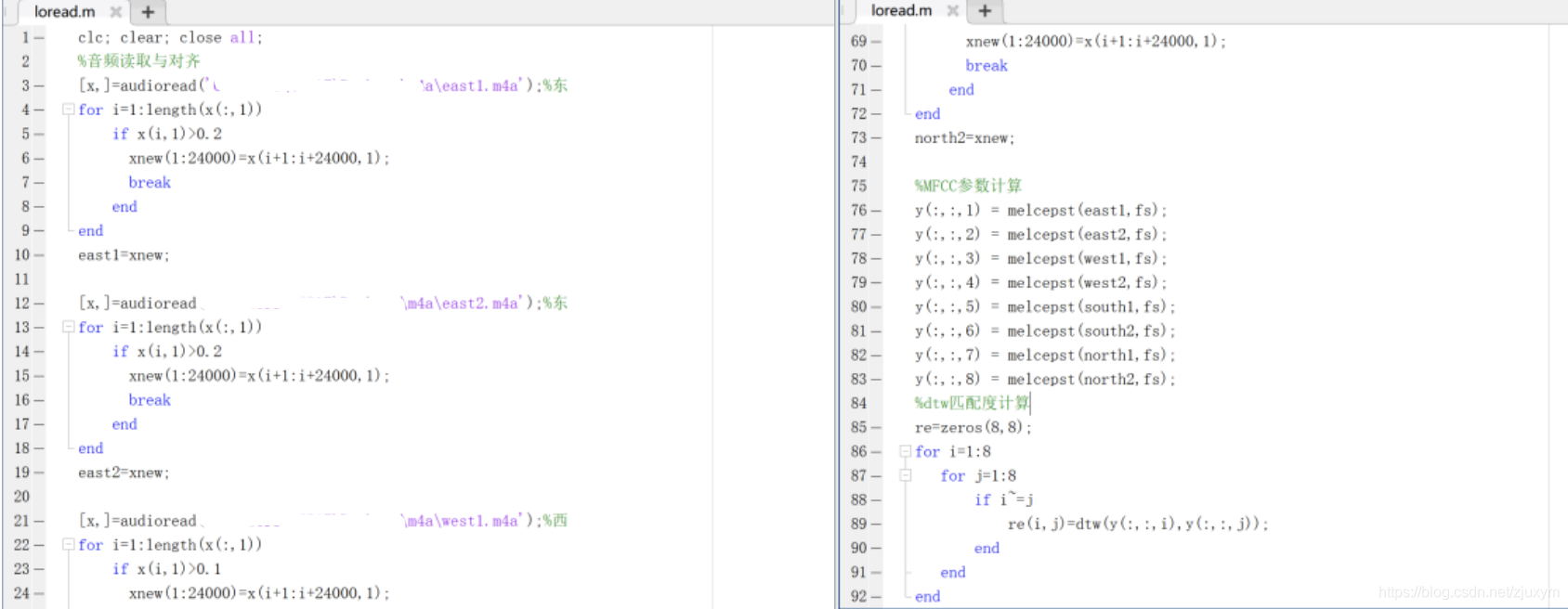
運行后結果如下,可以看出,與檔案2匹配度最高的為檔案1,與檔案4匹配度最高的為檔案3,與檔案6匹配度最高的為檔案5,與檔案8匹配度最高的為檔案7,即“東”,“南”,“西”,“北”的音頻均識別正確,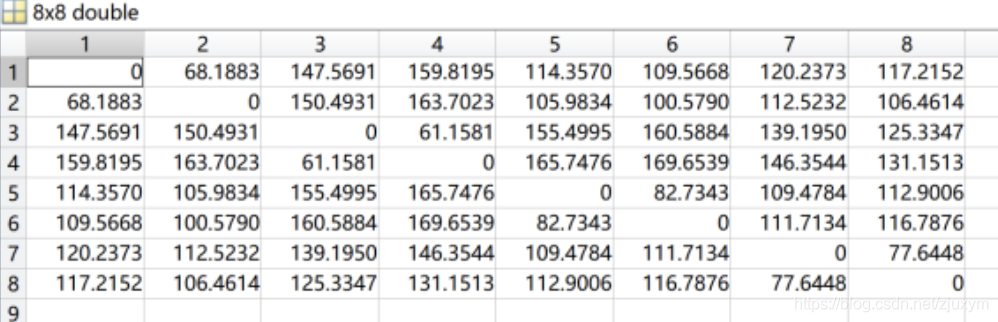
在此基礎上稍作修改即可完成音頻資訊與數字控制訊息間的轉化,
3.5 控制模塊
在仿真中假設地圖滿足上北下南左西右東的規則,設計控制器MATLAB代碼mov.m定義為:function [destination,line] = mov(decode,start)%回傳目的地和路徑
因為此處只涉及平移的操作,實作起來較為簡單,直接利用case陳述句寫即可,所以不再贅述,
3.6 系統整體實作
根據前面的分析可以來撰寫整體的代碼,對輸入設定如下,
%輸入聲音檔案,內部每2s一個聲音信號,每個信號有效長度在0.5s以內,順序為北-東北-東-東南-南-西南-西-西北,旋轉一圈
xdig=m4a2xdig('C:\Users\46817\Desktop\m4a\序列.m4a');
運行結果如下,
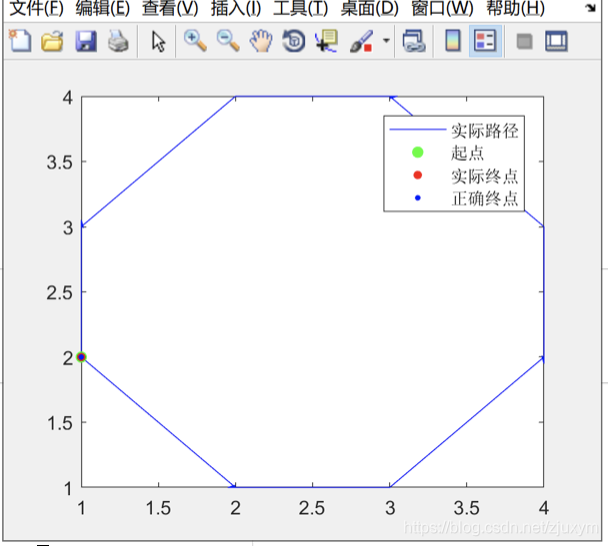
從結果可見小車成功按照語音控制信號的指示路徑轉了一圈,回到了起點,遠程聲音控制系統設計成功,
由于收集大量音頻信號作業量比較大,此處在MATLAB內隨機挑選八個方向的音頻信號共100次并將結果整合成一個向量來作為輸入進行整體系統性能的測驗,實作代碼如下,
for i=1:100
j=randi([1 8]);
tem(i,:)=orim4a(j,:);%orim4a內為各音頻信號
end
xm4a=reshape(tem',1,100*length(orim4a));
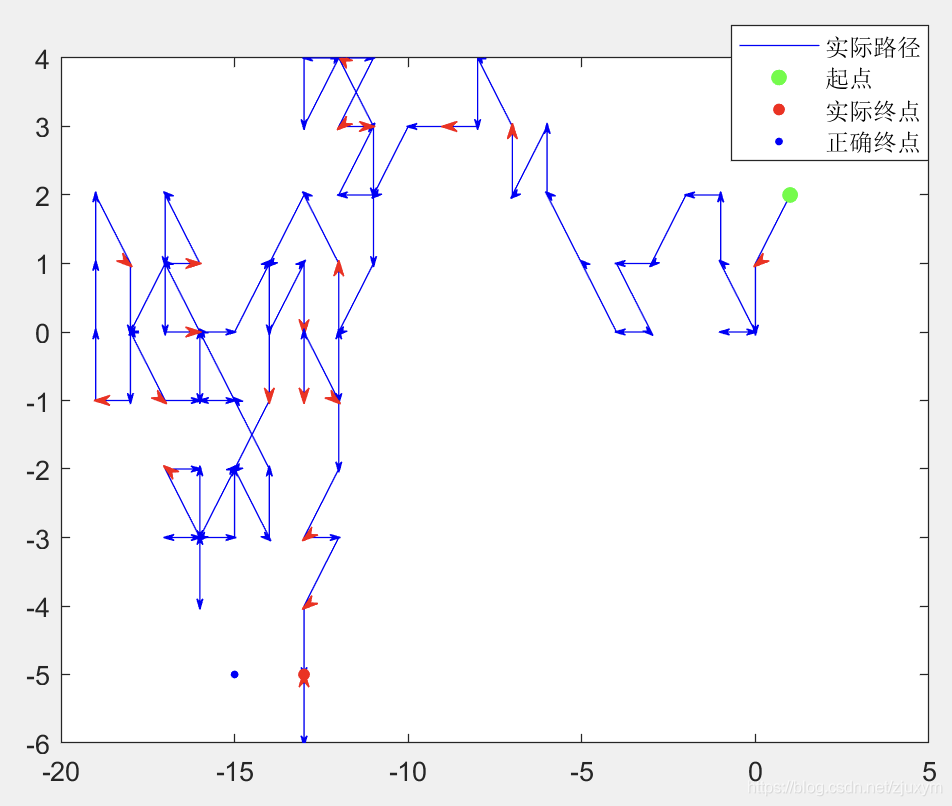
仿真結果如下所示,從圖中可見此小車路徑中沒有出現紅色箭頭,并且實際終點與正確終點相重合,因此遠端訊息對小車進行了準確的控制操作,因此所設計系統對大量輸入也能正確進行遠程控制,設計成功,
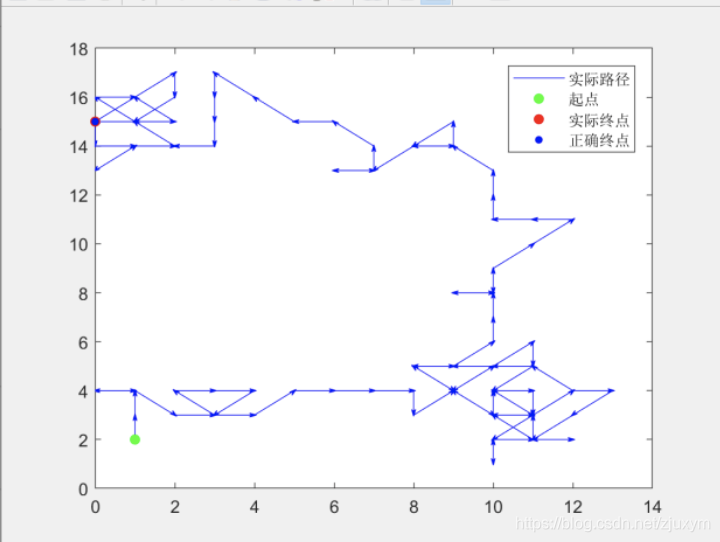
當信噪比較小例如1dB時,控制信號在傳輸時可能會受噪聲影響而出錯,造成如下結果,可見有很多路徑出現了紅色箭頭,即識別出錯,最后的終點也與正確終點不同,因此該系統對信道的噪聲有一定要求,
至此,遠程聲音控制系統仿真完成,
此處附上整體實作代碼
clc;clear;close all;
%%輸入
%輸入聲音檔案,內部每2s一個聲音信號,每個信號有效長度在0.5s以內,順序為北-東北-東-東南-南-西南-西-西北,旋轉一圈
[xm4a,fs]=audioread('');
%%
%編碼和調制模塊
%信源PCM編碼
xso=soencodePCM(xm4a);
%信道編碼
len=3;
xch=chencode(xso,len);
%QPSK調制
x=bi2de((reshape(xch,2,length(xch)/2))');
yout=pskmod(x,4);
%%
%噪聲模塊
SNR=10;
yn=awgn(yout,SNR);
%%
%解調和解碼模塊
%解調
yin=pskdemod(yn,4);
ydein=reshape(de2bi(yin,2)',1,length(yin)*2);
%信道解碼
ych=chdecode(ydein,len);
%信源PCM解碼
yso=sodecodePCM(ych);
%%
%音頻信號處理模塊
ydig=m4a2xdig(yso);
%%
%控制系統
%起始點
start=[1 2];
%控制器決議傳入信號
[outy,liney]=mov(ydig,start);
%控制器決議原始信號
xdig=m4a2xdig(xm4a);
[outx,linex]=mov(xdig,start);
%繪制小車路徑的有向圖、起點、正確終點、實際終點
plot(liney(:,1),liney(:,2),'Color','b');hold on;
for i = 1:length(ydig)
if ydig(i)==xdig(i)%資訊傳遞正確則藍色箭頭
ay = annotation('arrow','HeadLength',4,'HeadWidth',3,'Color','b');
else%資訊傳遞錯誤則紅色箭頭
ay = annotation('arrow','HeadLength',6,'HeadWidth',5,'Color','r');
end
set(ay,'parent',gca);
set(ay,'position',[liney(i+1,1) liney(i+1,2) 0.05*(liney(i+1,1)-liney(i,1)) 0.05*(liney(i+1,2)-liney(i,2))]);
hold on;
end
plot(start(1),start(2),'g.','MarkerSize',20);hold on;
plot(outy(1),outy(2),'r.','MarkerSize',15);hold on;
plot(outx(1),outx(2),'b.','MarkerSize',10);hold on;
legend('實際路徑','起點','實際終點','正確終點');
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/254841.html
標籤:其他
上一篇:HTML視頻無法自動播放問題
下一篇:linux下BMP圖片旋轉