前言
硬體平臺:MSM8953/SDM450
軟體平臺:Android9.0
主攝IC: IMX258 (AF、Flash)
前攝IC: GC5025(AF)
景深: OV5670/GC5025(AF)
Qocm平臺Android5.1 和Android8.0 (N1 msm8909)流程基本一致,Android9.0(msm8953)框架變化較大,
而展訊平臺Android4.4(S2 SC9020E),框架又有所不同,因此共三份檔案,
這是第一份,A-(msm8953 Android9.0),后續有 B-(msm8909 Android5.1/8.0) 和C-(SC9820E Android4.4)
在msm8953平臺,前攝和景深配置和主攝基本一致,只是CSI 配置和CCI配置不同,
MSM8953 最多支持(4+4+2+1)4個攝像頭,SDM450最多支持(4+4+4)3個攝像頭
名字解釋;
- Rear Camera : 主攝、后攝
- Front Camera:前攝、副攝
- Depth Camera:景深、后輔攝
索引
目錄 1
前言 4
1. 內核部分(kernel部分) 5
1.1 主攝硬體原理圖 (Rear Camera SCH) 5
1.2 主攝設備樹配置 (Rear Camera dts cfg) 6
1.3 前攝硬體原理圖 (Front Camera HardWare) 8
1.4 前攝設備樹配置 (Front Camera dts cfg) 8
1.5 景深硬體原理圖 (Depth Camera SCH) 10
1.6 景深攝像頭設備樹配置 (Depth Camera dts cfg) 10
1.7 閃光燈 (Flash LED) 11
1.8 對焦馬達AF 12
1.9 平臺硬體介面定義 (Platform Camera SCH) 12
2 vendor 添加驅動 15
2.1 lib 驅動引數配置部分 15
2.2 Chromatix 效果引數配置部分 16
2.3. vendor編譯選項配置 17
2.3.1 配置系統要加載的camera 17
2.3.2 效果編譯選項配置 20
2.3.3 lib和chromatix庫包含編譯選項 21
3. Camera MCLK修改 23
3.1 修改MCLK驅動頻率 23
3.2 修改MCLK驅動能力 24
Tips: 26
lib so庫單刷驗證: 26
1. 內核部分 (Kernel)
1.1 主攝硬體原理圖 (Rear Camera SCH)
主攝imx258 sensor硬體原理圖:有AF、閃光燈
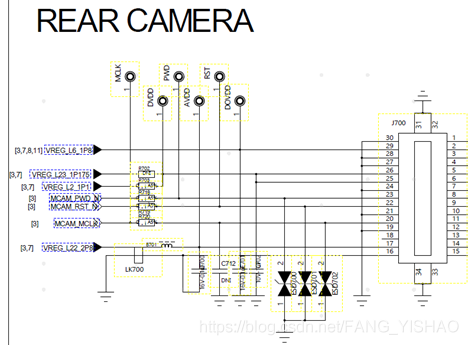
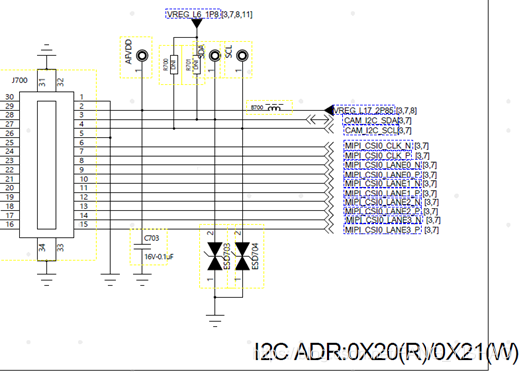
主攝閃光燈:
1.2 主攝設備樹配置 (Rear Camera dts cfg)
由主攝硬體原理圖,配置 imx258 (CSI_0)主攝節點:
路徑: kernel\msm-4.9\arch\arm64\boot\dts\xxx\xxx_msm8953-camera-sensor-qrd.dtsi
重點關注供電腳、rst腳、pwd腳、mclk腳、CCI通道配置,CSI通道配置等,
/* Back Cmaera */
qcom,camera@0 {
cell-index = <0>;
compatible = "qcom,camera";
reg = <0x0>;
// csi0 默認為主攝
qcom,csiphy-sd-index = <0>;
// 同上
qcom,csid-sd-index = <0>;
// 掛載角度,根據顯示效果修改,這里不起作用,需修改vendorxml配置
qcom,mount-angle = <90>;
// 閃光燈
qcom,led-flash-src = <&led_flash0>;
// eeprom,也叫OTP,用于校準camera sensor的顯示效果
//qcom,eeprom-src = <&eeprom0>;
// 自動對焦馬達AF選配功能
qcom,actuator-src = <&actuator0>;
// pin-29 1.8伏IO核電
cam_vio-supply = <&pm8953_l6>;
// pin-25 26 1.2伏數字dig電
cam_vdig-supply = <&pm8953_l2>;
// pin-17 2.8伏模擬vana電
cam_vana-supply = <&pm8953_l22>;
// AF馬達2.8V供電,
cam_vaf-supply = <&pm8953_l17>;
qcom,cam-vreg-name = "cam_vana", "cam_vio", "cam_vdig","cam_vaf";
qcom,cam-vreg-min-voltage = <2800000 0 1200000 2850000>;
qcom,cam-vreg-max-voltage = <2800000 0 1225000 2850000>;
qcom,cam-vreg-op-mode = <80000 0 105000 100000>;
pinctrl-names = "cam_default", "cam_suspend";
pinctrl-0 = <&cam_sensor_mclk0_default
&cam_sensor_rear_default>;
pinctrl-1 = <&cam_sensor_mclk0_sleep &cam_sensor_rear_sleep>;
// 依次是mclk rst pwd
gpios = <&tlmm 26 0>,
<&tlmm 40 0>,
<&tlmm 39 0>;
qcom,gpio-reset = <1>;
qcom,gpio-standby = <2>;
qcom,gpio-req-tbl-num = <0 1 2>;
qcom,gpio-req-tbl-flags = <1 0 0>;
qcom,gpio-req-tbl-label = "CAMIF_MCLK0",
"CAM_RESET0",
"CAM_STANDBY0";
// 位置0 表主攝,vendor的配置起實際作用
qcom,sensor-position = <0>;
qcom,sensor-mode = <0>;
// 掛載的CCI通道編號(0/1)
qcom,cci-master = <0>;
status = "ok";
clocks = <&clock_gcc clk_mclk0_clk_src>,
<&clock_gcc clk_gcc_camss_mclk0_clk>;
clock-names = "cam_src_clk", "cam_clk";
// mclk 頻率配置, Cam正常作業后會輸出24M 波形,
// vendor 配置起實際作用,頻率可修改
qcom,clock-rates = <24000000 0>;
};
1.3 前攝硬體原理圖 (Front Camera HardWare)
前攝gc5025 硬體接線原理圖
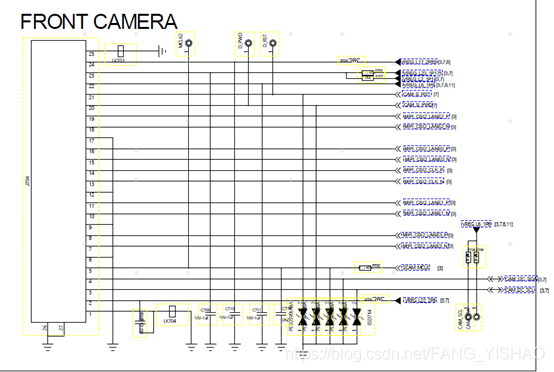
1.4 前攝設備樹配置 (Front Camera dts cfg)
由前攝硬體原理圖,配置 gc5025 (CSI_2)前攝節點:有AF,無閃光燈
路徑: kernel\msm-4.9\arch\arm64\boot\dts\xxx\xxx_msm8953-camera-sensor-qrd.dtsi
重點關注供電腳、rst腳、pwd腳、mclk腳、CCI通道配置,CSI通道配置等,馬達 eeprom 閃光燈先不講,
/* Front Cmaera */
qcom,camera@2 {
cell-index = <2>;
compatible = "qcom,camera";
reg = <0x02>;
qcom,csiphy-sd-index = <2>;
qcom,csid-sd-index = <2>;
qcom,mount-angle = <270>;
//qcom,eeprom-src = <&eeprom2>;
qcom,actuator-src = <&actuator1>;
cam_vdig-supply = <&pm8953_l23>;
cam_vana-supply = <&pm8953_l22>;
cam_vio-supply = <&pm8953_l6>;
cam_vaf-supply = <&pm8953_l17>;
qcom,cam-vreg-name = "cam_vdig", "cam_vio", "cam_vana","cam_vaf";
qcom,cam-vreg-min-voltage = <1200000 0 2800000 2850000>;
qcom,cam-vreg-max-voltage = <1200000 0 2800000 2850000>;
qcom,cam-vreg-op-mode = <105000 0 80000 100000>;
qcom,gpio-no-mux = <0>;
pinctrl-names = "cam_default", "cam_suspend";
pinctrl-0 = <&cam_sensor_mclk1_default
&cam_sensor_front1_default>;
pinctrl-1 = <&cam_sensor_mclk1_sleep
&cam_sensor_front1_sleep>;
gpios = <&tlmm 27 0>,
<&tlmm 129 0>,
<&tlmm 130 0>;
qcom,gpio-reset = <1>;
qcom,gpio-standby = <2>;
qcom,gpio-req-tbl-num = <0 1 2>;
qcom,gpio-req-tbl-flags = <1 0 0>;
qcom,gpio-req-tbl-label = "CAMIF_MCLK1",
"CAM_RESET1",
"CAM_STANDBY1";
qcom,sensor-position = <1>;
qcom,sensor-mode = <0>;
qcom,cci-master = <0>;
status = "ok";
clocks = <&clock_gcc clk_mclk1_clk_src>,
<&clock_gcc clk_gcc_camss_mclk1_clk>;
clock-names = "cam_src_clk", "cam_clk";
qcom,clock-rates = <24000000 0>;
};
1.5 景深硬體原理圖 (Depth Camera SCH)
景深使用OV5670/GC5025兼容設計:
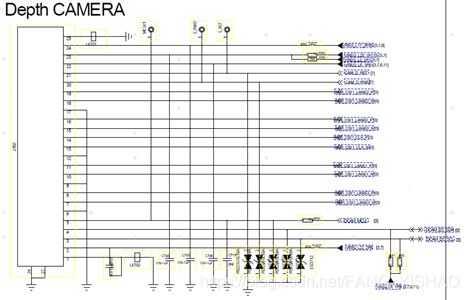
1.6 景深攝像頭設備樹配置 (Depth Camera dts cfg)
由景深攝硬體原理圖,配置 OV5670/GC5025 (CSI_1)景深節點:有AF,無閃光燈
景深攝像頭,使用OV5670/GC5025 兼容設計,支持AF,CCI和主攝掛載在同一路,前攝單獨一路,因此可以上層打開三個camera,而不會發生IIC尋址沖突,
/* Depth Cmaera */
qcom,camera@1 {
cell-index = <1>;
compatible = "qcom,camera";
reg = <0x1>;
qcom,csiphy-sd-index = <1>;
qcom,csid-sd-index = <1>;
qcom,mount-angle = <270>;
qcom,actuator-src = <&actuator1>;
cam_vdig-supply = <&pm8953_l23>;
cam_vana-supply = <&pm8953_l22>;
cam_vio-supply = <&pm8953_l6>;
cam_vaf-supply = <&pm8953_l17>;
qcom,cam-vreg-name = "cam_vdig", "cam_vio", "cam_vana","cam_vaf";
qcom,cam-vreg-min-voltage = <1200000 0 2800000 2850000>;
qcom,cam-vreg-max-voltage = <1200000 0 2800000 2850000>;
qcom,cam-vreg-op-mode = <105000 0 80000 100000>;
qcom,gpio-no-mux = <0>;
pinctrl-names = "cam_default", "cam_suspend";
pinctrl-0 = <&cam_sensor_mclk2_default
&cam_sensor_front_default>;
pinctrl-1 = <&cam_sensor_mclk2_sleep
&cam_sensor_front_sleep>;
gpios = <&tlmm 28 0>,
<&tlmm 131 0>,
<&tlmm 132 0>;
qcom,gpio-reset = <1>;
qcom,gpio-standby = <2>;
qcom,gpio-req-tbl-num = <0 1 2>;
qcom,gpio-req-tbl-flags = <1 0 0>;
qcom,gpio-req-tbl-label = "CAMIF_MCLK2",
"CAM_RESET2",
"CAM_STANDBY2";
qcom,sensor-position = <0>;
qcom,sensor-mode = <0>;
qcom,cci-master = <1>;
status = "ok";
clocks = <&clock_gcc clk_mclk2_clk_src>,
<&clock_gcc clk_gcc_camss_mclk2_clk>;
clock-names = "cam_src_clk", "cam_clk";
qcom,clock-rates = <24000000 0>;
};
1.7 閃光燈(Flash LED)
閃光燈其實是pmi632驅動的一個IO口,兼具閃光和照明兩種功能,
閃光模式,亮度值最大值255,照明模式為一半亮度<=127,
閃光燈拍照,會先預閃(短閃,為了防止紅眼現象),然后再閃一次(長閃),中間需要設定正確的跳幀數,再拍照,
flash led 節點配置路徑:kernel\msm-4.9\arch\arm64\boot\dts\xxx\xxx_pmi632.dtsi
配置 led_flash 節點,閃光燈由pmi632驅動:
&soc {
led_flash0: qcom,camera-flash {
cell-index = <0>;
compatible = "qcom,camera-flash";
qcom,flash-type = <1>;
qcom,flash-source = <&pmi632_flash0 &pmi632_flash1>;
qcom,torch-source = <&pmi632_torch0 &pmi632_torch1>;
qcom,switch-source = <&pmi632_switch0>;
};
};參考閃光燈節點
qcom,led-flash-src = <&led_flash0>;1.8 對焦馬達AF
用途,實作攝像頭的自動對焦功能,軟體上當作一個CCI設備來處理,
擁有cam sensor一樣的上電時序,掛載在CCI設備,
AF 加載失敗會導致camera 無法正常打開,
配置AF 節點
actuator0: qcom,actuator@0 {
cell-index = <0>;
reg = <0x0>;
compatible = "qcom,actuator";
qcom,cci-master = <0>;
cam_vaf-supply = <&pm8953_l17>;
qcom,cam-vreg-name = "cam_vaf";
qcom,cam-vreg-min-voltage = <2850000>;
qcom,cam-vreg-max-voltage = <2850000>;
qcom,cam-vreg-op-mode = <80000>;
};
參考AF 節點
qcom,actuator-src = <&actuator0>;2. vendor 添加驅動
一般lib和chromatix驅動檔案廠家會提供,若不提供,需要找一個比較相近的sensor,或同一個廠商、同一個資料格式的驅動檔案上修改而來,
vendor驅動主要分三部分,
- lib 驅動引數配置部分
- chromatix 效果引數配置部分
- 編譯選項配置
2.1 Lib 驅動引數配置部分
主攝lib驅動路徑為:vendor\qcom\proprietary\mm-camera\mm-camera2\media-controller\modules\sensors\sensor\libs\imx258\
路徑下共三個檔案:
imx258_lib.c // 主要引數配置在這里面
imx258_lib.h // 曝光函式、對焦等函式定義
Android.mk // 編譯組態檔
imx258_lib.c 包含:上電時序、init-setting、解析度輸出配置、資料格式、gain地址配置、通道配置、降噪引數配置等等,
此檔案直接決定sensor是否能正常出圖,
imx258_lib.h 包含:gain(模擬增益和數字增益)、曝光行、等配置,此檔案直接決定sensor曝光的3A顯示效果(配合效果檔案引數配置進行),
Android.mk作用:這里宣告生成的so庫為 libmmcamera_imx258 .so
LOCAL_MODULE := libmmcamera_imx258
以后修改了這里面的引數,可以單編,adb單刷libmmcamera_imx258 .so,
同理,前攝、景深和主攝配置流程一致:
主攝:libmmcamera_imx258.so
前攝:libmmcamera_gc5025.so
景深:libmmcamera_ov5670.so或 libmmcamera_gc5025.so(與前攝共用)
以后修改了這里面的引數,可以單編,adb單刷libmmcamera_imx258 .so,
劃重點,后面要考的,
補充:
adb 可以查看lib so庫的位置,可以單編單push去更新配置,
如:libmmcamera_imx258.so 位于 vendor\lib
- adb root
- adb remount (Adnroid9.0 需要先disable-verity,才能remount)
- adb push libmmcamera_imx258.so /vendor/lib/
- adb sync
- adb remount
2.2 Chromatix 效果引數配置部分
主攝效果檔案路徑為:vendor\qcom\proprietary\mm-camera\mm-camera2\media-controller\modules\sensors\chromatix\0310\chromatix_imx258\
adb 下位于 vendor\lib == 格式為 libchromatix_imx258_xxx
路徑下有很多檔案,簡單說明:
3A:3A 演算法引陣列態檔
common: 公共引陣列態檔,這個是必須的
cpp:后端處理效果引陣列態檔
isp:ISP部分檔案
postproc:略
Android.mk:編譯選項組態檔,上面每個檔案夾中,都會有一個Android.mk 檔案,會包含對應的檔案,并生成一個效果庫,”舉個栗子“:
vendor\qcom\proprietary\mm-camera\mm-camera2\media-controller\modules\sensors\chromatix\0310\chromatix_imx258\common\Android.mk
LOCAL_SRC_FILES:= chromatix_imx258_common.c
LOCAL_MODULE := libchromatix_imx258_common
對應生成 libchromatix_imx258_common.so 效果引數庫劃重點,后面要考
如有單獨修改,可單編單刷驗證,
其他的效果檔案,配置同上,都會生成對應的效果so庫,
前攝和景深和主攝配置方法一致,略過,
2.3. vendor 編譯選項配置
2.3.1 配置系統要加載的camera
組態檔:
vendor\qcom\proprietary\mm-camera\mm-camera2\media-controller\modules\sensors\configs\ msm8953_camera.xml
// 注意,有做專案抽取的,要到對應目錄修改同名檔案
這個組態檔,不能單編單刷,必須全編全刷vendor才會更新,
adb 下位于 vendor\etc\camera\camera_config.xml
下面就是為系統配置了默認主攝imx258,可做兼容,主要資訊做簡要說明,
主攝(ixm258) xml組態檔
<CameraModuleConfig>
<CameraId>0</CameraId> // camera ID,主攝0,景深1,前攝2
<SensorName>imx258</SensorName> // cam sensor 名字,和imx258_lib.h 中一致
<ActuatorName>dw9714</ActuatorName> // 馬達驅動名字,先忽略
<FlashName>pmic</FlashName> // 閃光燈控制方式
<ChromatixName>imx258_bear_chromatix</ChromatixName> // 效果組態檔名
<ModesSupported>1</ModesSupported>
<Position>BACK</Position> // 位置后攝
<MountAngle>90</MountAngle> // 掛載角度
<CSIInfo>
<CSIDCore>0</CSIDCore> // CSID 的編號,主攝0,景深、前攝1
// csi配置,bit1固定為clk,bit0,bit2、bit3、bit4,代表miipi-csi lane通道是否啟用
// 如使用4lane,為0xb11111=0x1F, 使用2lane,0b111 = 0x03
<LaneMask>0x1F</LaneMask>
<LaneAssign>0x4320</LaneAssign> // 同上
<ComboMode>0</ComboMode>
</CSIInfo>
<LensInfo> // 鏡頭等引數配置,根據規格書填寫
<FocalLength>3.47</FocalLength>
<FNumber>2.2</FNumber>
<TotalFocusDistance>1.9</TotalFocusDistance>
<HorizontalViewAngle>63.84</HorizontalViewAngle>
<VerticalViewAngle>47.88</VerticalViewAngle>
<MinFocusDistance>0.1</MinFocusDistance>
</LensInfo>
</CameraModuleConfig>前攝(GC5025) xml組態檔
<CameraModuleConfig>
<CameraId>2</CameraId>
<SensorName>gc5025</SensorName>
<ActuatorName>ces6301</ActuatorName>
<ChromatixName>gc5025_chromatix</ChromatixName>
<ModesSupported>1</ModesSupported>
<Position>FRONT</Position>
<MountAngle>270</MountAngle>
<CSIInfo>
<CSIDCore>1</CSIDCore>
<LaneMask>0x7</LaneMask>
<LaneAssign>0x4320</LaneAssign>
<ComboMode>0</ComboMode>
</CSIInfo>
<LensInfo>
<FocalLength>1.98</FocalLength>
<FNumber>2.4</FNumber>
<TotalFocusDistance>1.2</TotalFocusDistance>
<HorizontalViewAngle>68.0</HorizontalViewAngle>
<VerticalViewAngle>51.0</VerticalViewAngle>
<MinFocusDistance>0.1</MinFocusDistance>
</LensInfo>
</CameraModuleConfig>
景深(兼容OV5670/GC5025 ) xml 配置:
景深 (OV5670) xml 配置:
<CameraModuleConfig>
<CameraId>1</CameraId>
<SensorName>ov5670</SensorName>
<ChromatixName>ov5670_chromatix</ChromatixName>
<ModesSupported>1</ModesSupported>
<Position>BACK_AUX</Position>
<MountAngle>270</MountAngle>
<CSIInfo>
<CSIDCore>1</CSIDCore>
<LaneMask>0x7</LaneMask>
<LaneAssign>0x4320</LaneAssign>
<ComboMode>0</ComboMode>
</CSIInfo>
<LensInfo>
<FocalLength>1.98</FocalLength>
<FNumber>2.4</FNumber>
<TotalFocusDistance>1.2</TotalFocusDistance>
<HorizontalViewAngle>68.0</HorizontalViewAngle>
<VerticalViewAngle>51.0</VerticalViewAngle>
<MinFocusDistance>0.1</MinFocusDistance>
</LensInfo>
</CameraModuleConfig>
景深(GC5025) xml 配置
<CameraModuleConfig>
<CameraId>1</CameraId>
<SensorName>gc5025</SensorName>
<ActuatorName>dw9714</ActuatorName>
<ChromatixName>gc5025_chromatix</ChromatixName>
<ModesSupported>1</ModesSupported>
<Position>BACK_AUX</Position>
<MountAngle>270</MountAngle>
<CSIInfo>
<CSIDCore>1</CSIDCore>
<LaneMask>0x7</LaneMask>
<LaneAssign>0x4320</LaneAssign>
<ComboMode>0</ComboMode>
</CSIInfo>
<LensInfo>
<FocalLength>1.98</FocalLength>
<FNumber>2.4</FNumber>
<TotalFocusDistance>1.2</TotalFocusDistance>
<HorizontalViewAngle>68.0</HorizontalViewAngle>
<VerticalViewAngle>51.0</VerticalViewAngle>
<MinFocusDistance>0.1</MinFocusDistance>
</LensInfo>
</CameraModuleConfig>2.3.2 效果編譯選項配置
平臺組態檔中,配置了幾個camera就有幾個效果組態檔,
主攝:imx258_bear_chromatix.xml
前攝:gc5025_chromatix.xml
景深:gc5025_chromatix.xml(和前攝共用) 、ov5670_chromatix.xml
<ChromatixName>imx258_bear_chromatix</ChromatixName> // 效果組態檔名上面提到的這個屬性,就是對應的效果檔案名,包含了不同效果模式的配置,
效果組態檔路徑:vendor\qcom\proprietary\mm-camera\mm-camera2\media-controller\modules\sensors\configs\ imx258_bear_chromatix.xml
內容如下:
<CommonChromatixInfo> // 預覽、拍照、錄像使用的基本的配置
<ChromatixName>
<ISPCommon>imx258_bear_common</ISPCommon>
<PostProc>imx258_bear_postproc</PostProc>
<CPPPreview>imx258_bear_cpp_preview</CPPPreview>
<CPPSnapshot>imx258_bear_cpp_snapshot</CPPSnapshot>
<CPPLiveshot>imx258_bear_cpp_liveshot</CPPLiveshot>
</ChromatixName>
</CommonChromatixInfo>
<ResolutionChromatixInfo>
<ChromatixName sensor_resolution_index="0">
<ISPPreview>imx258_bear_snapshot</ISPPreview>
<ISPSnapshot>imx258_bear_snapshot</ISPSnapshot>
<ISPVideo>imx258_bear_default_video</ISPVideo>
<CPPVideo>imx258_bear_cpp_video</CPPVideo>
<A3Preview>imx258_bear_zsl_preview_lc898217xc</A3Preview>
<A3Video>imx258_bear_zsl_video_lc898217xc</A3Video>
</ChromatixName>
<ChromatixName sensor_resolution_index="0">如上每一種index,都是一種不同顯示模式需要的引數搭配,包含了不同幀率、不同解析度的配置型別,
imx258_bear_common
imx258_bear_postproc
imx258_bear_cpp_preview
imx258_bear_cpp_snapshot每一個庫,都可以在效果路徑下找到對應的Android.mk,
2.3.3 Lib 和chromatix庫包含編譯選項
在 device-vendor.mk 組態檔中
路徑:vendor\qcom\proprietary\common\config\ device-vendor.mk
// 注意,有做專案抽取的,要到對應目錄修改同名檔案
主要有兩類檔案:
libmmcamera_xxx.so 是lib驅動的庫
libchromatix_xx.so 是效果驅動的庫1、 lib 庫包含
MM_CAMERA += libchromatix_imx258_common
2、 chromatix庫包含
MM_CAMERA += libchromatix_imx258_bear_common
MM_CAMERA += libchromatix_imx258_bear_cpp_hfr_60
MM_CAMERA += libchromatix_imx258_bear_cpp_hfr_90
MM_CAMERA += libchromatix_imx258_bear_cpp_hfr_120
MM_CAMERA += libchromatix_imx258_bear_cpp_liveshot
MM_CAMERA += libchromatix_imx258_bear_cpp_preview
MM_CAMERA += libchromatix_imx258_bear_cpp_snapshot
MM_CAMERA += libchromatix_imx258_bear_cpp_video
MM_CAMERA += libchromatix_imx258_bear_cpp_video_4k
MM_CAMERA += libchromatix_imx258_bear_default_video
MM_CAMERA += libchromatix_imx258_bear_hfr_60
MM_CAMERA += libchromatix_imx258_bear_hfr_90
MM_CAMERA += libchromatix_imx258_bear_hfr_120
MM_CAMERA += libchromatix_imx258_bear_liveshot
MM_CAMERA += libchromatix_imx258_bear_postproc
MM_CAMERA += libchromatix_imx258_bear_preview
MM_CAMERA += libchromatix_imx258_bear_snapshot
MM_CAMERA += libchromatix_imx258_bear_video_4k
MM_CAMERA += libchromatix_imx258_bear_4k_preview_lc898217xc
MM_CAMERA += libchromatix_imx258_bear_4k_video_lc898217xc
MM_CAMERA += libchromatix_imx258_bear_default_preview_lc898217xc
MM_CAMERA += libchromatix_imx258_bear_default_video_lc898217xc
MM_CAMERA += libchromatix_imx258_bear_hfr_60_lc898217xc
MM_CAMERA += libchromatix_imx258_bear_hfr_90_lc898217xc
MM_CAMERA += libchromatix_imx258_bear_hfr_120_lc898217xc
MM_CAMERA += libchromatix_imx258_bear_zsl_preview_lc898217xc
MM_CAMERA += libchromatix_imx258_bear_zsl_video_lc898217xc3、charomatix 組態檔包含
MM_CAMERA += imx258_bear_chromatix.xml上述這些庫和chromatix組態檔的包含配置必須寫到 device-vendor.mk 中,
4、 前攝、景深和主攝的添加流程一致,
3. Camera MCLK修改
根據不同的sensor規格,有的需要的是24MHz的mclk時鐘,有的則是37.125、75.25MHz的時鐘等等,
但平臺配置的是默認24MHz輸出,
那么改如何修改呢?
參考檔案:
kba-170619002148_3_[camera]change_to_avoid_camera_mclk_jitter_issue.pdf
kba-170619002148_3_[camera]change_to_avoid_camera_mclk_jitter_issue.pdf
3.1 修改MCLK驅動頻率
有時由于MCLK抖動問題(抖動太大),我們可能會在攝像機預覽中在黑暗場景中看到線噪聲,因此需要解決此類問題,如果從傳感器側調整PLL仍無法解決問題,
我們需要使用 xo時鐘作為產生MCLK(更好的抖動)的源,
- Kernel Camera dts部分
路徑:kernel\msm-4.9\arch\arm64\boot\dts\xxx\xxx_msm8953-camera-sensor-qrd.dtsi
修改為37.125MHz示例:
status = "ok";
clocks = <&clock_gcc clk_mclk0_clk_src>,
<&clock_gcc clk_gcc_camss_mclk0_clk>;
clock-names = "cam_src_clk", "cam_clk";
// qcom,clock-rates = <24000000 0>;
qcom,clock-rates = <37125000 0>;
};
2. Kernel clk src部分
路徑: kernel\msm-4.9\drivers\clk\msm\clock-gcc-8953.c
修改方法,前攝37.125例:
static struct clk_freq_tbl ftbl_mclk1_clk_src[] = {
F( 24000000, gpll6_main_div2, 1, 2, 45),
F( 33330000, gpll0_main_div2, 12, 0, 0 ),
F( 36610000, gpll6, 1, 2, 59),
+ F( 37200000, gpll0, 1, 2, 43), // set 37.125 Mhz
F( 66667000, gpll0, 12, 0, 0 ),
F_END
};主攝修改:
主攝修改:
static struct clk_freq_tbl ftbl_mclk0_clk_src[] = {
F( 24000000, gpll6_main_div2, 1, 2, 45),
F( 33330000, gpll0_main_div2, 12, 0, 0 ),
F( 36610000, gpll6, 1, 2, 59),
+ F( 37200000, gpll0, 1, 2, 43), // set 37.125 Mhz
F( 66667000, gpll0, 12, 0, 0 ),
F_END
};
3. Vendor Camera lib檔案修改
路徑:vendor\qcom\proprietary\mm-camera\mm-camera2\media-controller\modules\sensors\sensor\libs\xxx\xxx_lib.h
修改方法:
.seq_type = CAMERA_POW_SEQ_CLK,
.seq_val = CAMERA_MCLK,
// .config_val = 24000000,
.config_val = 37200000,
.delay = 20,
3.2 修改 MCLK 驅動能力
參考檔案:KBA_170619001341_3__Camera_How_to_change_MCLK_driv.pdf
修改方式:
/*sensors */
cam_sensor_mclk0_default: cam_sensor_mclk0_default {
/* MCLK0 */
mux {
/* CLK, DATA */
pins = "gpio26";
function = "cam_mclk";
};
config {
pins = "gpio26";
bias-disable; /* No PULL */
// 2 mA, change to 4mA, 2, 4, 6, 8, 10… max is 16mA
// 默認2ma,最大可修改為16ma
drive-strength = <2>; /* 2 MA */
};
};
Tips:
lib so 庫單刷驗證:
版本需要是debug 版本,需要root和remount
- camera so庫單刷,要 root和remount,才能單刷,然后 adb sync、 reboot、push
- 附一個單刷腳本
@echo on
adb root
adb remount
adb push out\target\product\M11\vendor\lib\libmmcamera_imx307.so /vendor/lib/
adb push out\target\product\M11\vendor\lib\libmmcamera_imx307_face.so /vendor/lib/
adb sync
adb reboot效果so庫的單刷驗證同上,
你再快,也永遠有人比你快!Fighting ~~
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/254844.html
標籤:其他
上一篇:使用開源軟體FFmpeg將各種格式視頻轉換成MP4視頻格式(最簡單方法)
下一篇:c#面向物件的三大特征之一繼承