歡迎來到精神小火君的科技主義教室!
害,如今已經十六屆智能車啦也是我最后一次參賽了,第十五屆充滿了遺憾,如今也只能總結失敗繼續向前啦,接下來就在這里持續更新這次十六屆智能車制作的實況吧,主要從硬體設計,程式設計,賽道元素,車模處理這幾個方面出發,期待十六屆的到來 加油UPUPUP!
@Author: 精神小🔥君!
👇想要我的財寶嗎?想要的話可以全部給你,去找出來吧,這世上所有的一切都在那里!👇
ONE PIECE地址: ? 精神小🔥君的博客?
文章目錄
- 歡迎來到精神小火君的科技主義教室!
- 前言
- 一、總體介紹
- 二、電源部分
- 2.1 舵機電源(AS1015方案)
- 2.2 5V電源(LM2940-5.0V)
- 2.3 3V3電源(RT9013-33V)
- 2.4 運放電源(RT9013-33V)
- 2.5 攝像頭電源(RT9013-33V)
- 三、外設部分
- 3.1 主要介面
- 3.2 除錯外設
- 三、主控部分
- 四、總結
前言
第十五屆的時候我在隊伍里主要負責的是硬體電路的繪制與焊接,在這方面也是一個老手啦,接下來我就開源一下我的主板設計吧,關于硬體的設計我想說的是要站在巨人的肩膀上,我也不是自己造電路的,大多數都是抄別人的方案,我重點講一下元器件的PCB與原理圖的繪制方面的問題,并對主板進行設計的簡化方便智能車的使用,今年參加的是四輪組,選用的是逐飛科技的TC264,主板方案也是參考逐飛科技的(不是打廣告),資料的話逐飛有開源的大家可以去找找,或者私信我留一下郵箱,謝謝, 那現在我們就開始吧! 以下是介紹主板的各個組成部分,僅供參考,一、總體介紹
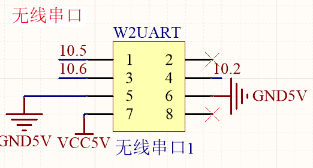
此次智能車的主板包括了舵機電源,運放電源,攝像頭電源,3V3電源以及攝像頭、運放、電機介面,此外還加入了ICM20602陀螺儀,無線串口與五向按鍵方便日后的除錯,
二、電源部分
2.1 舵機電源(AS1015方案)
舵機電源采用的是AS1015方案,新型高效率電源穩壓芯片,內部采用P-MOSFET取代老式的LM2576、LM2596、LM2941等芯片,參考一下技術手冊的原理圖與主板原理圖,大致差不多,
技術手冊的原理圖與主板原理圖如下:
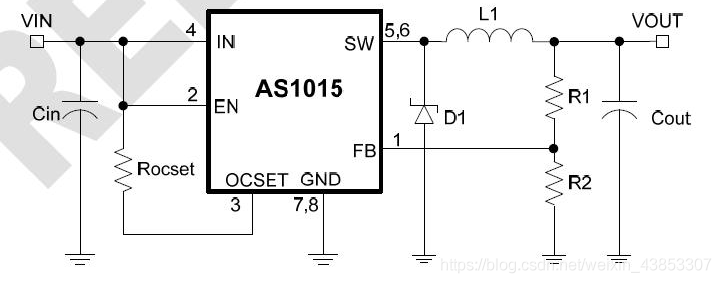
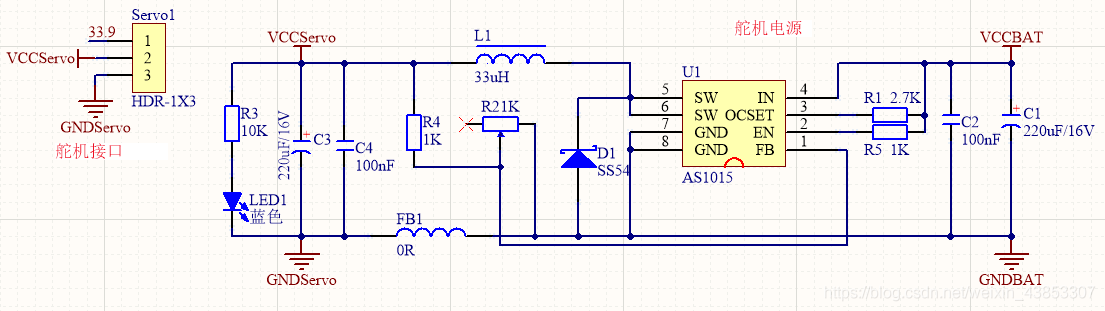
對比技術手冊原理圖可在輸出端加一個反饋,用于調節PWM占空比,可以把R2換成一個1K變阻器,就可以實作電壓調節了,D1用肖特基二極管(SS54),高頻特性好且導通壓降低,
實測效果,跟LM2596-ADJ相比:供電:12V電池,輸出穩定在6.5V;負載:38KG大力舵機;測驗方法:快速左右轉動,空載測驗;壓降:AS1015電壓一直保持在6V以上,LM2596-ADJ則會降到4.5V左右,壓降相對更小比較小,因為驅動舵機需要6V的電壓,AS1015的穩定性最好所以非常推薦,
2.2 5V電源(LM2940-5.0V)
5V電源采用的是LM2940,是一種非常常見的電源方案,LM2940是輸出電壓固定的低壓差三端穩壓器;輸出電壓5V;輸出電流1A;輸出電流1A時,最小輸入輸出電壓差小于0.8V;最大輸入電壓26V;作業溫度-40~+125℃;內含靜態電流降低電路、電流限制、過熱保護、電池反接和反插入保護電路,
原理圖如下
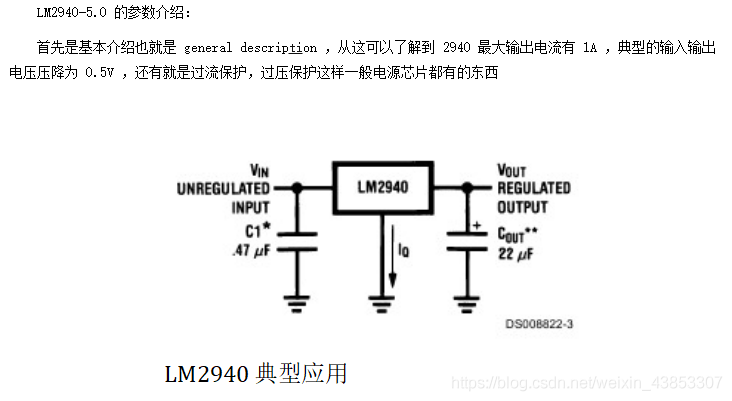
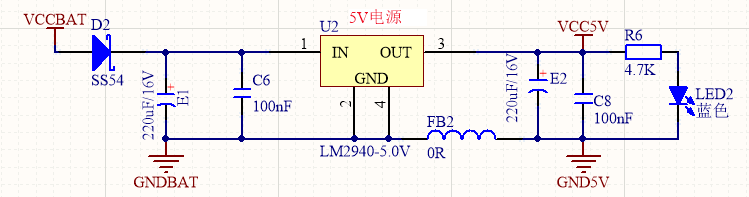
這里對電路進行一下解釋,采用SS54是為了防止電池反接,這里采用的220uf為鉭電容(封裝7343E),因為容量大所以封裝相對較大,所以購買元器件的話要注意一下,選擇鉭電容雖然質量好一點但價格也是有點小貴的哦,大家注意,
可能有人發現GNDBAT與GND5V之間的回路中有一個0R的存在這是有特殊目的的,具體參考一下下文:
模擬地和數字地單點接地只要是地,最終都要接到一起,然后入大地,
如果不接在一起就是”浮地”,存在壓差,容易積累電荷,造成靜電,地是參考0電位,所有電壓都是參考地得出的,
地的標準要一致,故各種地應短接在一起,人們認為大地能夠吸收所有電荷,始終維持穩定,是最終的地考點,
雖然有些板子沒有接大地,但發電廠是接大地的,板子 上的電源最侄訓是會回傳發電廠入地,
如果把模擬地和數字地大面積直接相連,會導致互相干擾,不短接又不妥,理由如上有四種方法解決此問題:
1、用磁珠連接; 磁珠的等效電路相當于帶阻限波器,只對某個頻點的噪聲有顯著抑制作用,
使用時需要預先估計噪點頻率,以便選用適當型號,對于頻率不確定或無法預知的情況,磁珠不合,
2、用電容連接; 電容隔直通交,易造成浮地,
3、用電感連接; 電感體積大,雜散引數多,不穩定,
4、用0 歐姆電阻連接; 0 歐電阻相當于很窄的電流通路,能夠有效地限制環路電流,使噪聲得到抑制,電阻在所有頻帶上都有衰減作用(0 歐電阻也有阻抗),這點比磁珠強,
這里的5V電源的目的是給攝像頭電源,運放電源,無線串口,與TTL提供輸入,
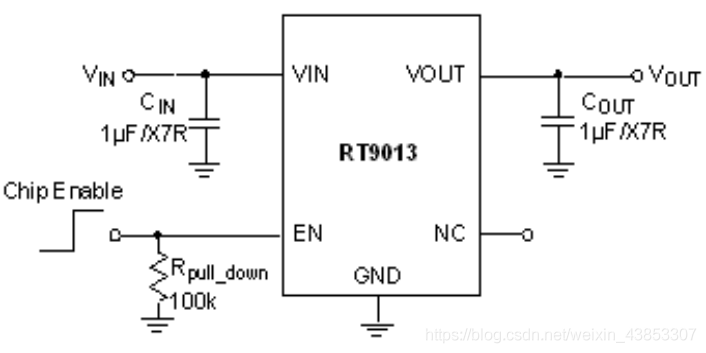
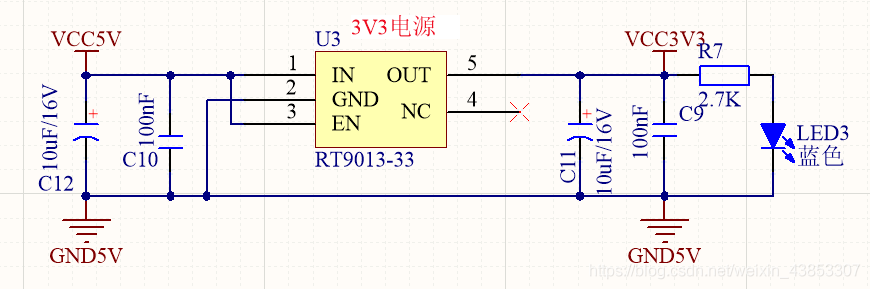
2.3 3V3電源(RT9013-33V)
3V3電源采用的是RT9013-33,RT9013屬于集成電路IC,它是一款高性能、輸出電流能力 500mA 的線性穩壓器,提供極高的 PSRR 和 超低壓降,非常符合可攜式 RF 和無線應用的效能和大小需求,靜態電流可低至 25μA,來延長電池的使用壽命,
技術手冊的原理圖與主板原理圖如下:
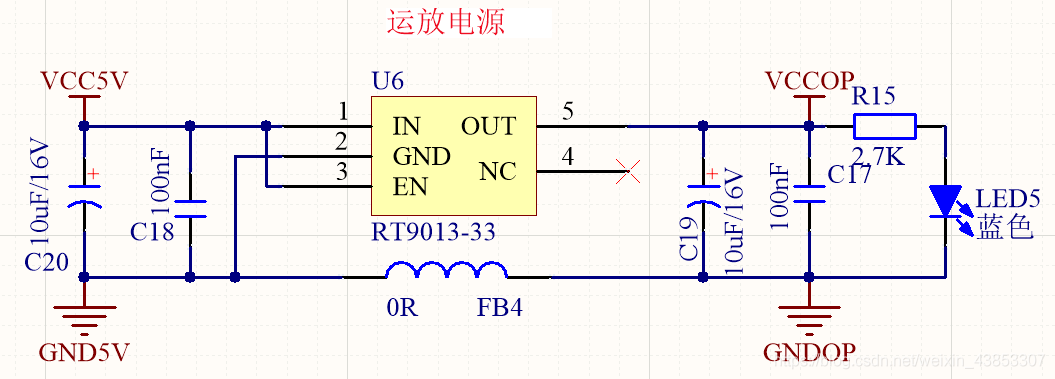
2.4 運放電源(RT9013-33V)
運放電源采用的也是RT9013方案,具體參考3V3電源方案,因為運放電源是將VCC5V向VCCOP轉換,所以也要加上磁珠或0歐姆電阻,
運放電源原理圖如下:
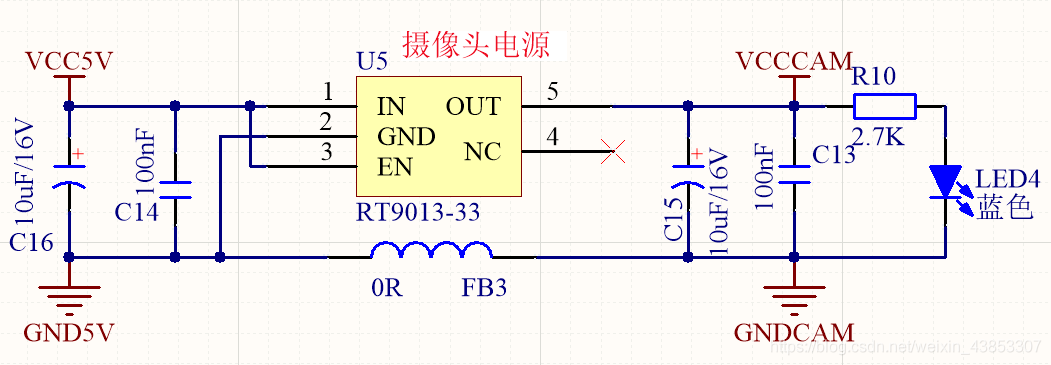
2.5 攝像頭電源(RT9013-33V)
攝像頭電源采用的也是RT9013方案,具體參考3V3電源方案,因為攝像頭電源是將VCC5V向VCCCAM轉換,所以也要加上磁珠或0歐姆電阻,
攝像頭電源原理圖如下:
三、外設部分
3.1 主要介面
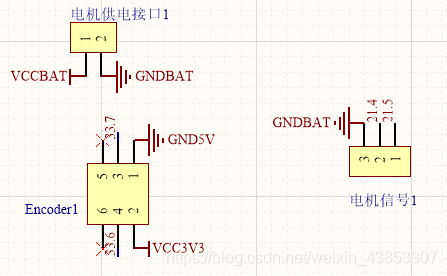
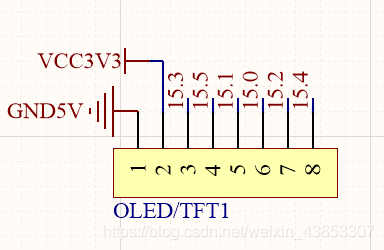
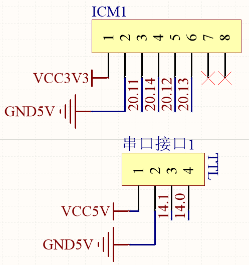
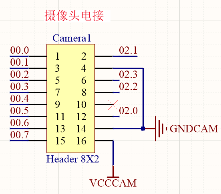
主要介面主要是螢屏、攝像頭、無線串口、陀螺儀與電機的介面,這里就簡單放一下,
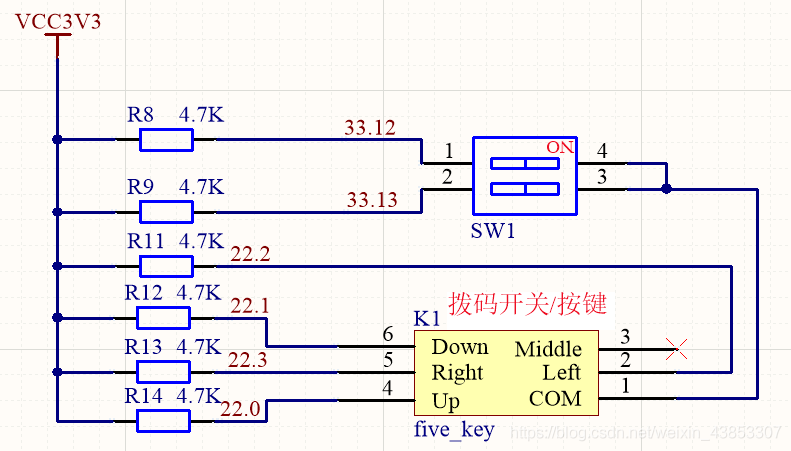
3.2 除錯外設
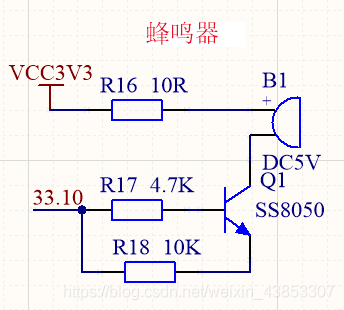
除錯常用的外設為五向按鍵和蜂鳴器,具體設計如下,
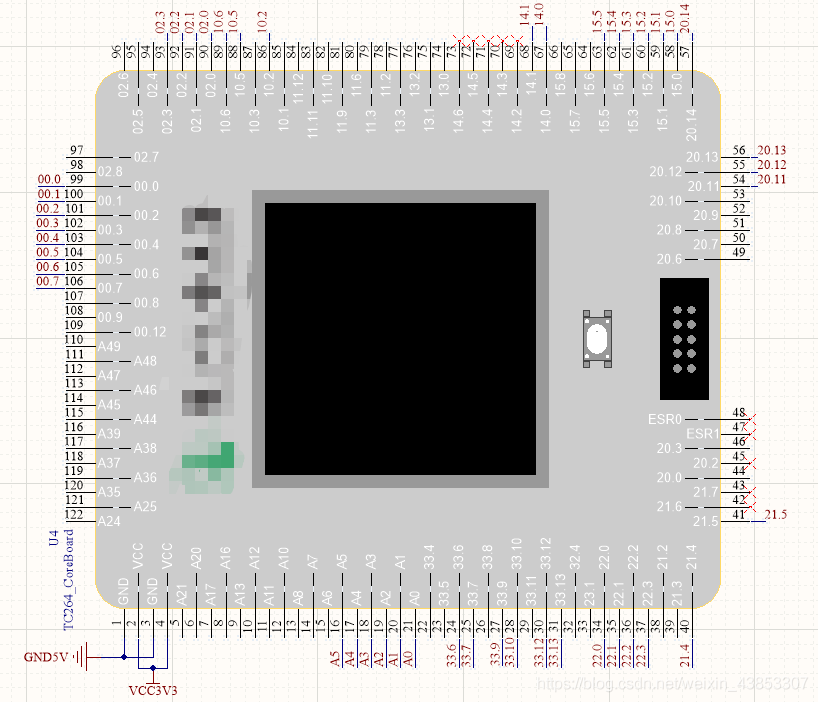
三、主控部分
此次主控選擇的是逐飛科技的TC264,沒有選用TC377這種高性能的,TC264已經完全夠我用了,關于用到的外設介面網路如下,
主控原理圖如下:
四、總結
以上就是主板原理圖的介紹了,對小白來說應該比較友好吧,如果實在不懂原理的話,就照著先抄一遍,然后買來元器件焊接測驗一下,很多問題就會迎刃而解,TC264不像RT1064那樣對電源時序部分有要求,所以焊接除錯應該不會有太大問題,接下來還是繼續開源我運放與單電機驅動原理圖,希望對大家有所幫助,
佛祖保佑,下期見!
/*
* _oo0oo_
* o8888888o
* 88" . "88
* (| -_- |)
* 0\ = /0
* ___/`---'\___
* .' \\| |// '.
* / \\||| : |||// \
* / _||||| -:- |||||- \
* | | \\\ - /// | |
* | \_| ''\---/'' |_/ |
* \ .-\__ '-' ___/-. /
* ___'. .' /--.--\ `. .'___
* ."" '< `.___\_<|>_/___.' >' "".
* | | : `- \`.;`\ _ /`;.`/ - ` : | |
* \ \ `_. \_ __\ /__ _/ .-` / /
* =====`-.____`.___ \_____/___.-`___.-'=====
* `=---='
*
*
* ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
*
* 佛祖保佑 永不宕機 永無BUG
*
* 佛曰:
* 寫字樓里寫字間,寫字間里程式員;
* 程式人員寫程式,又拿程式換酒錢,
* 酒醒只在網上坐,酒醉還來網下眠;
* 酒醉酒醒日復日,網上網下年復年,
* 但愿老死電腦間,不愿鞠躬老板前;
* 奔馳寶馬貴者趣,公交自行程式員,
* 別人笑我忒瘋癲,我笑自己命太賤;
* 不見滿街漂亮妹,哪個歸得程式員?
*/
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/255860.html
標籤:其他
下一篇:c語言整蠱朋友小程式