HSC490控制器除錯筆記
- HSC490控制器
- 1.硬體資訊
- 2.設備連接
- 3.問題及解決方法
HSC490控制器

C490是一款基于CoDesysV2.3軟體平臺開發的可現場編輯控制器,控制器編程符合IEC-61131-3標準,用戶使用CoDesysV2.3軟體進行應用程式開發,是針對行走機械而設計的控制器,能夠適應行走機械的惡劣作業環境如:溫度變化范圍大、高振動、高沖擊、強電磁干擾等,主要應用于重型車輛、建筑機械、破碎設備、農業機械、環衛機械、工業設備自動化應用等,
1.硬體資訊
1.1電源接線

1.2通訊介面

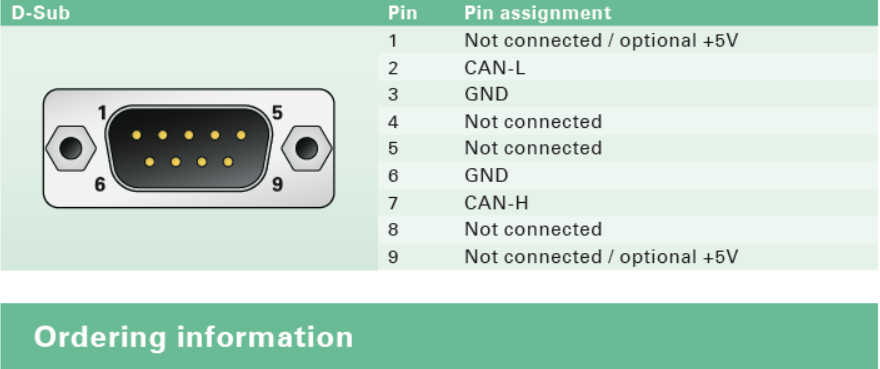
1.3CAN-USB線介面定義
2.設備連接
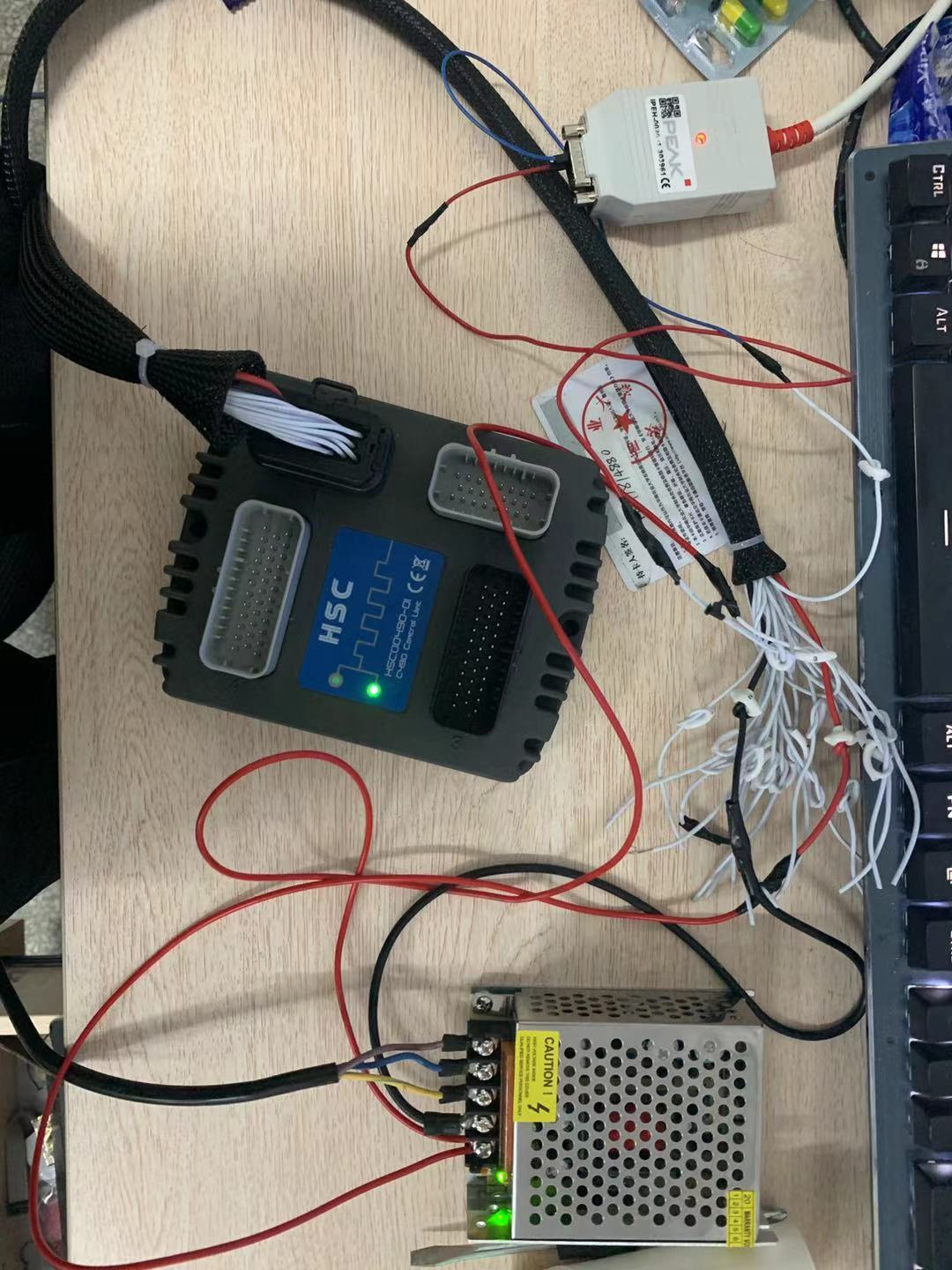
2.1硬體連接
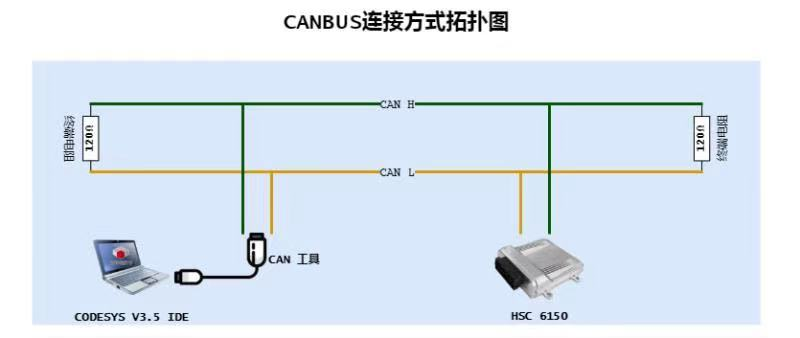
①將24V的直流電源正負極分別與XM1.1、XM1.2相鏈接給控制器供電,
②將XM1.3與電源正極相連,給通訊線供電,
③將XM1.20與XM1.21短接,給下載除錯CAN通訊介面并入2個120Ω終端電阻,
④將XM1.5與XM1.6與CAN-USB介面的7和2針腳相連并進行通訊,
2.2軟體通訊
①電腦安裝CAN-USB線驅動,
②CoDesysV2.3點擊登錄、運行,
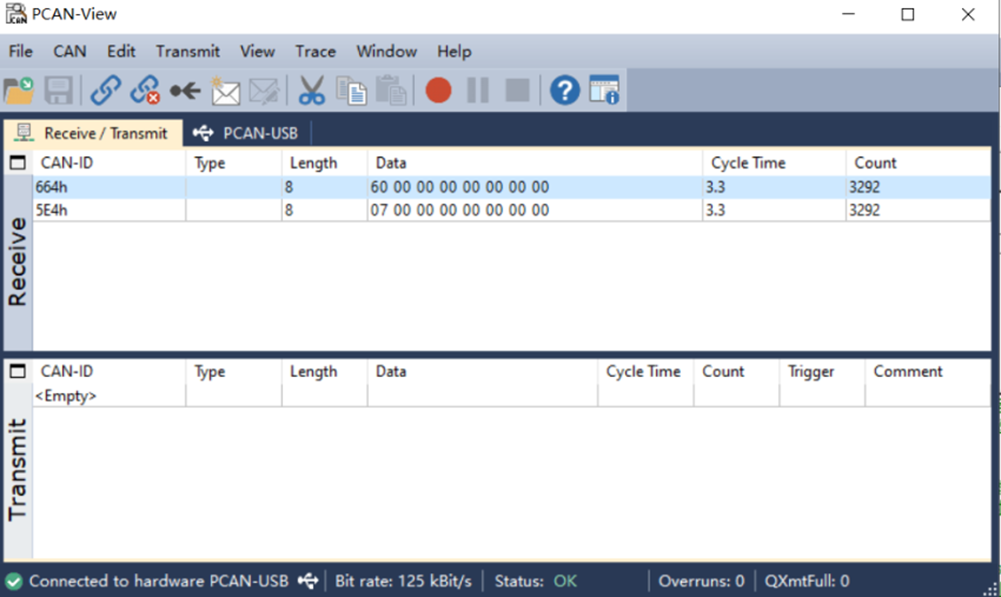
③打開PCAN軟體,點擊連接,可以跟蹤到報文,
④點擊創建引導工程即可將程式燒寫進控制器,
3.問題及解決方法
3.1 bus heavy
CAN線未并聯兩終端電阻,將XM1.20與XM1.21短接,給下載除錯CAN通訊介面并入2個120Ω終端電阻,
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/255965.html
標籤:其他
上一篇:STM32——兩個模塊代碼的合并