智能駕駛資料網路時間同步(PTP時鐘服務器)分析
隨著汽車電子的日益復雜化以及汽車電子電氣架構(EEA)的升級,人們對于聯網智能汽車的需求也在逐步上升,大量先進技術往汽車上應用,如高級駕駛輔助系統(ADAS)、自動駕駛等,這些新技術也對車載網路的帶寬有了更高的要求,從而使用以太網技術及中央域控制(Domain)和區域控制(Zonal)架構是下一代車載網路的發展方向,
然而對于自動駕駛技術的實作,涉及到感知、規劃、執行三個層面,由于車輛行駛在未知動態環境中,需要事先構建出環境地圖并在地圖中進行自我定位,這其中涉及到各傳感器資料的精確時間同步,然后根據傳感器捕獲的原始資料和已有環境場景,規劃車輛從一個位置到另一個位置的路徑,最后控制系統發出信號控制車上的電機或者液壓執行器執行相應的動作,
一、傳感器資料同步原理
通過設定唯一的時鐘主機給各類傳感器提供相同的基準時間,但是由于各傳感器設備時鐘晶振及資料傳輸路徑不同,需要根據提供的基準時間校準各自的時鐘時間,實作時間同步,最后根據校準后的時間為采集資料加上時間戳資訊,這樣就可以保證同一時刻采集相同的環境資訊,
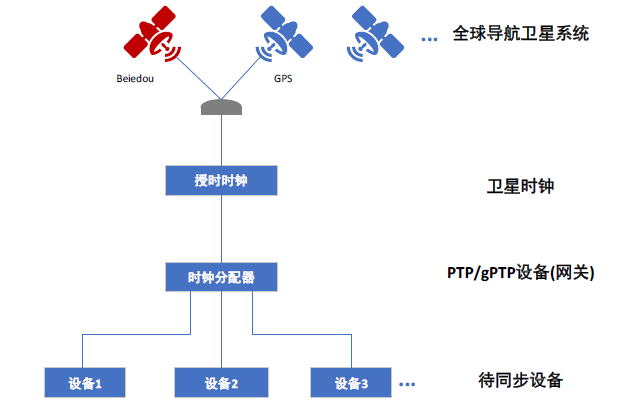
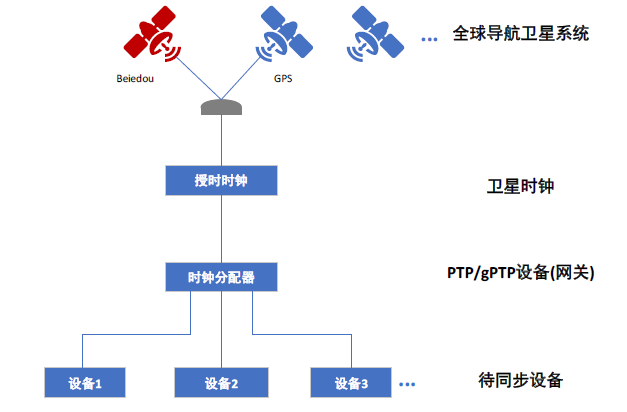 圖1:傳感器時鐘同步原理
圖1:傳感器時鐘同步原理
那么,怎么解決各傳感器設備由于時鐘晶振及資料傳輸路徑等不同,怎么根據基準時間校準自己的時間?可以使用PTP/gPTP協議解決各傳感器設備時間同步的問題!
二、PTP/gPTP時鐘同步協議介紹
PTP/gPTP時鐘同步協議是基于資料包的時間同步協議,資料傳輸和時間同步使用同一網路,它描述了如何在基于資料包網路(比如以太網)上分配同步時間(相位、頻率和絕對時間)的機制,時鐘精度達到亞微秒級,
三、相關名詞及概念
▼時鐘節點
構成時間域的各節點稱為時鐘節點,比如自動駕駛數采套件上的各類傳感器,協議定義以下三類:
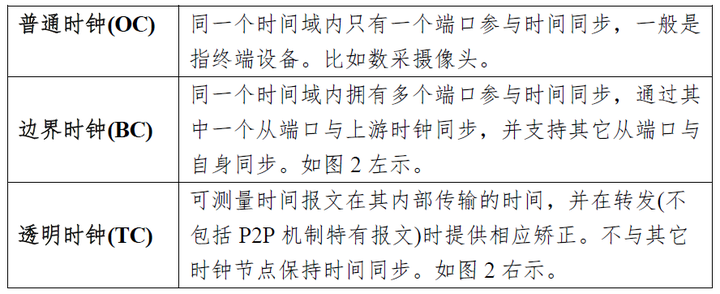
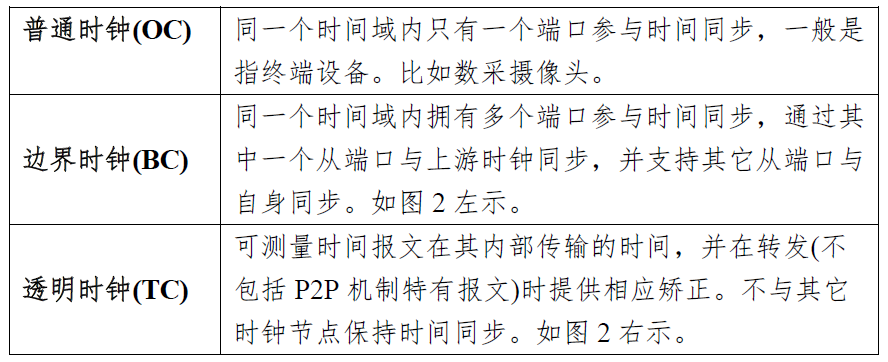 表1:時鐘節點型別
表1:時鐘節點型別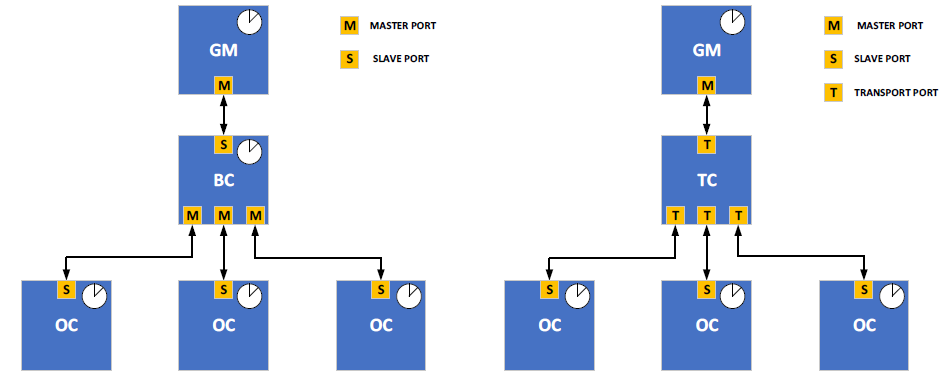 圖2:邊界時鐘與透明時鐘區別
圖2:邊界時鐘與透明時鐘區別
▼時鐘節點埠
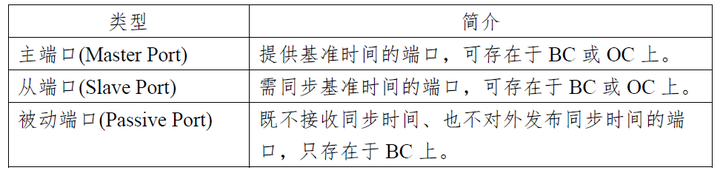
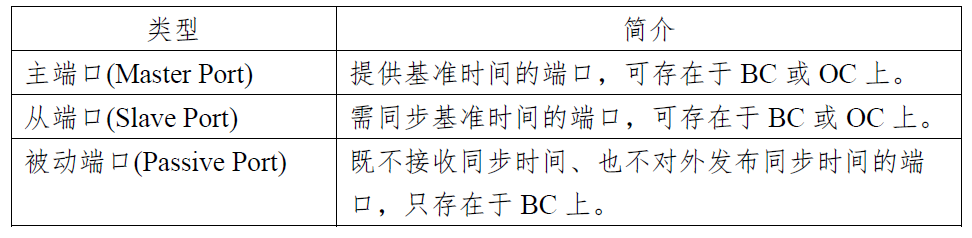 表2:埠狀態
表2:埠狀態
▼報文型別
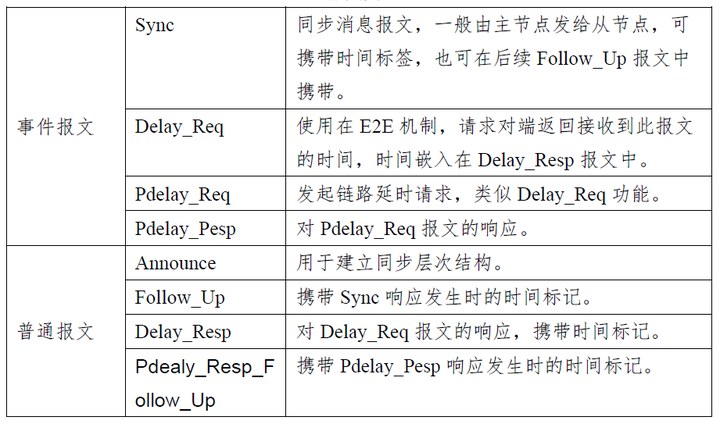
 表3:報文型別
表3:報文型別
▼傳輸延遲機制
協議中定義了兩種機制用來測量時間節點埠之間的傳輸延遲,
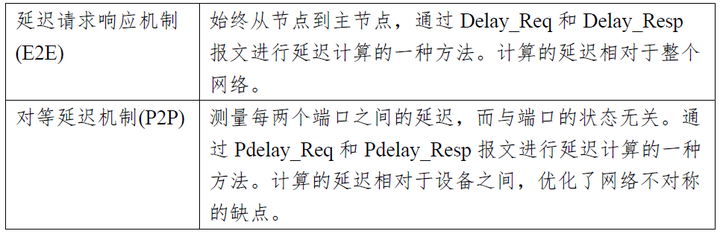
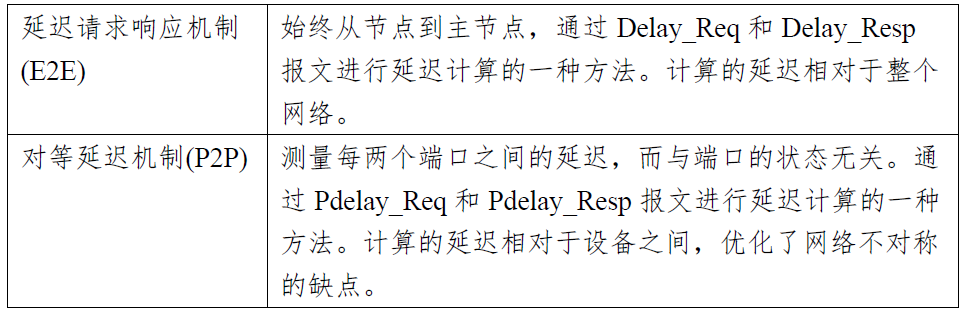 表4:傳輸延遲機制
表4:傳輸延遲機制
P2P機制優化了E2E在實際情況存在網路不對稱造成的誤差,那是不是我們就盡量P2P機制呢?顯然不是!P2P機制要求交換節點都能支持TC或BC模式,否則無法識別和回應Pdelay報文,系統記憶體在大量普通交換機,采用E2E是更好的選擇,
四、時鐘同步原理及傳輸延遲機制區
▼時鐘同步原理
協議的正常執行分為兩個步驟:
- 建立主從層次;
所有普通時鐘埠通過Announce報文和最佳主時鐘(BMCA)演算法來建立主從同步層次,處于從狀態與處于主狀態的埠進行同步,在域中,每個埠檢查該埠上接收的所有“Announce”訊息的內容,與普通時鐘或邊界時鐘相關埠資料集的內容相比較,以確定時鐘的每個埠的狀態, - 同步時鐘,
時差修正,延遲補償,需同步設備時間(T2) = 基準時間(T1)+鏈路延遲(Delay)+時鐘偏差(Offset),
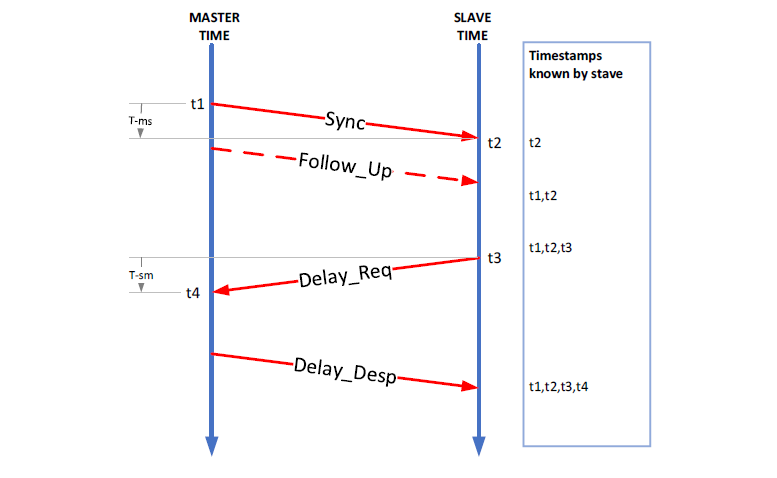
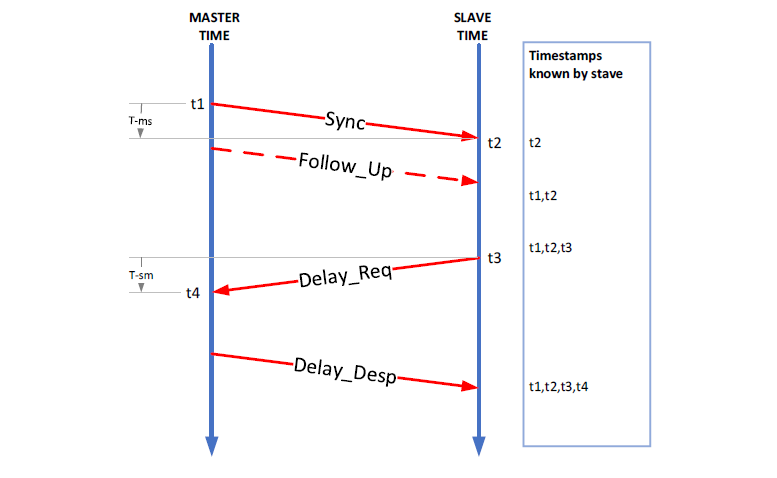 圖3:延遲請求回應機制
圖3:延遲請求回應機制
延遲請求回應機制步驟:
- 主節點向從節點發送Sync訊息,并記錄發送時間t1;
- 從節點收到該報文后,記錄接收時間t2;
- 主節點通過以下方式將時間戳t1傳遞給從節點;
? One-step方式:時間戳t1嵌入到Sync訊息中,對硬體處理能力要求較高,快速往Sync報文嵌入時間標簽,以實作高準確性和精度,
? Two-step方式:將時間戳t1嵌入到Follow_Up中, - 從節點向主節點發送Delay_Req報文,用于發起反向傳輸延時的計算,并記錄發送時間t3;
- 主節點收到Delay_Req報文之后,記錄接收時間t4;
- 主節點將t4嵌入到Delay_Resp訊息中,從而傳遞給從節點,
- 此時,從節點便擁有了t1~t4這四個時間戳,假設網路對稱,由此可計算出從節點相對于主節點的時鐘延遲:Delay=(t4-t3+t2-t1)/2,時鐘偏差:Offset=(t2-t4+t3-t1)/2,
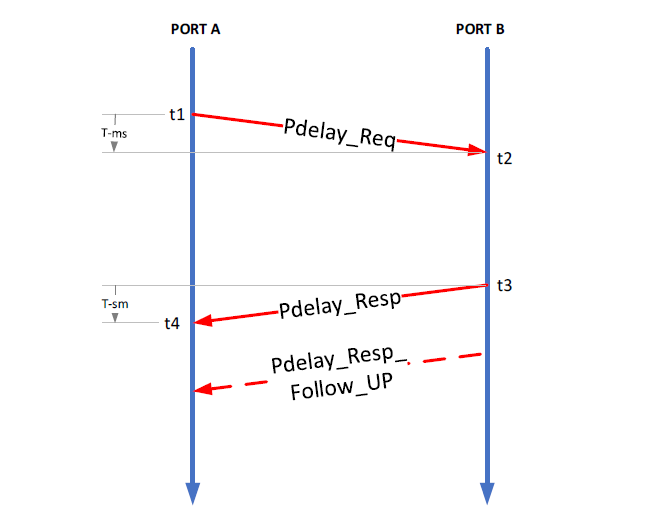
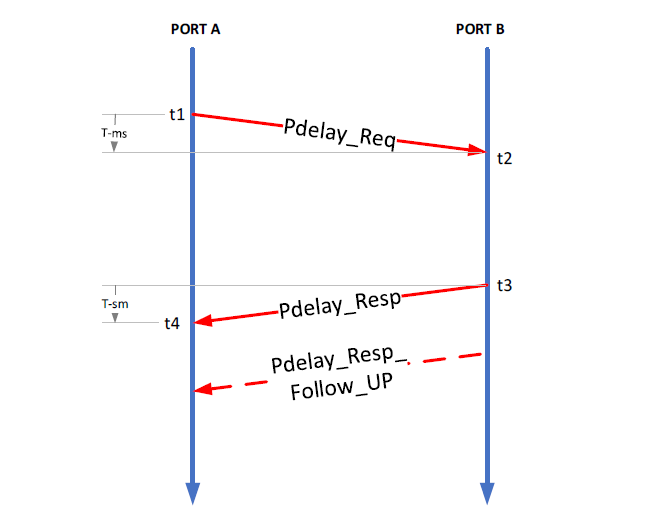 圖4:對等延遲機制
圖4:對等延遲機制
對等延遲機制步驟:
- 鏈路延遲測量從埠A開始,發出Pdelay_Req訊息并為Pdelay_Req訊息生成時間戳t1;
- 埠B接收Pdelay_Req訊息,并為該訊息生成時間戳t2;
- 埠B回傳一個Pdelay_Resp訊息,并為該訊息生成一個時間戳t3;
- 為了最小化兩個埠之間的頻率偏移所造成的錯誤,埠B在收到Pdelay_Req訊息后盡快回傳Pdelay_Resp訊息;
? One-step方式:Pdelay_Resp嵌入的t2和t3時間戳之間的差值;
? Two-step方式:Pdelay_Resp嵌入的t2時間標簽,dealy_Resp_Follow_Up嵌入t3時間標簽, - 埠A生成接收Pdelay_Resp訊息的時間戳t4,埠A然后使用這四個時間戳來計算平均鏈接延遲,Delay = [(t2–t1)+(t4–t3)]/2,時鐘偏差:Offset=(t2-t4+t3-t1)/2,
▼E2E與P2P區別
E2E機制只能從節點往主節點這個方向計算延遲,而P2P機制可以主從節點兩端計算延遲,如圖5所示,
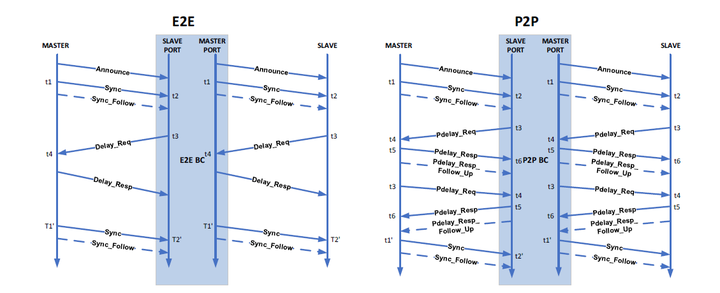
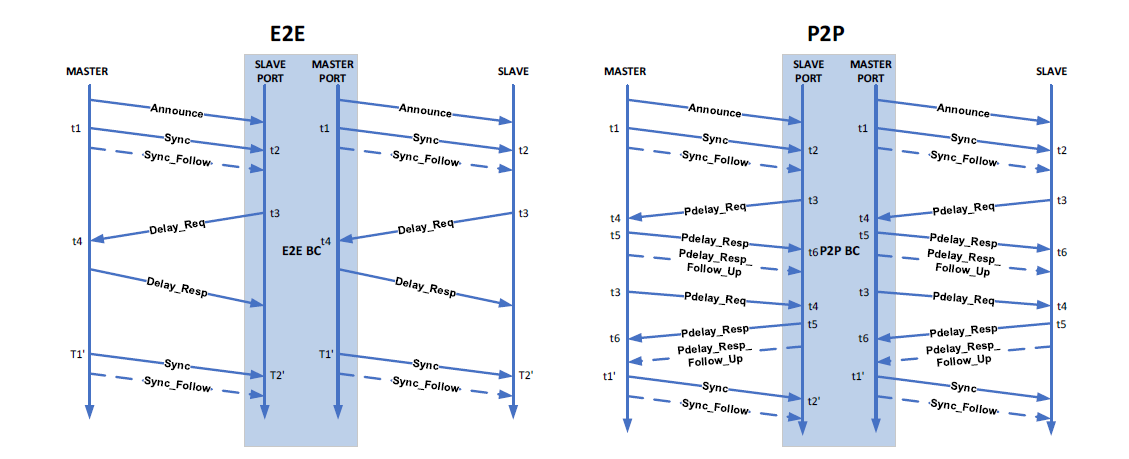 圖5:E2E和P2P在邊界時鐘區別
圖5:E2E和P2P在邊界時鐘區別
E2E機制報文能全部被TC轉發,而P2P機制獨有的報文不能被轉發,P2P機制下TC能把停留時間和沿路徑的鏈路延遲之和將報告給從站,E2E機制下TC能把沿路徑的停留時間總和將報告給從站,如圖6所示,
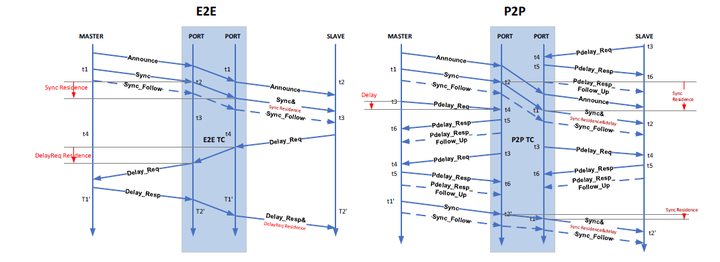
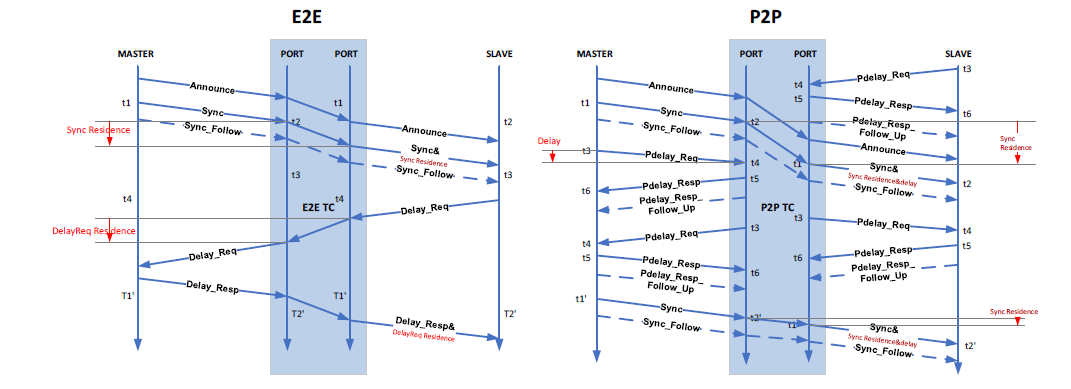 圖6:E2E和P2P在透明時鐘區別
圖6:E2E和P2P在透明時鐘區別
五、應用案例—ADAS資料采集解決方案
東信在構建精確時間同步系統方面具有豐富的經驗,能夠根據高清攝像頭、毫米波雷達、激光雷達等各類傳感器的特性,構建多種型別資料的處理分析系統,并實作資料的精確時間同步,
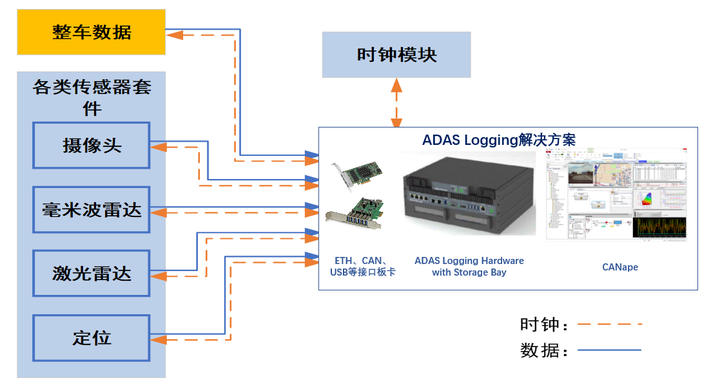
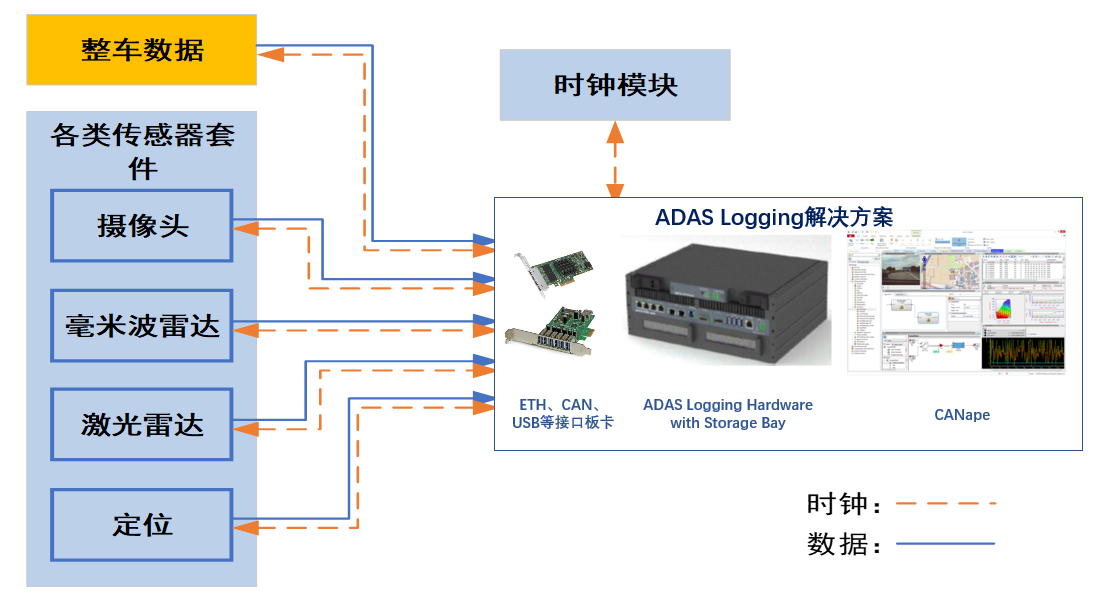 圖7:系統示例
圖7:系統示例
OK,今天的分享交流就到這里啦,若您還想了解更能多相關內容,歡迎給我們評論留言~
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/256231.html
標籤:其他