一 、I2C物理層
I2C 通訊設備之間的常用連接方式見圖:
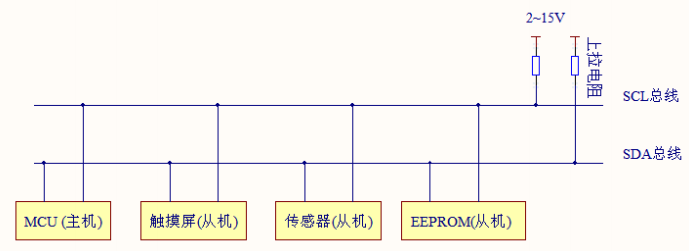
有以下特點:(參考資料手冊:上拉電阻一般4.7k~10k ,一般4.7k)
(1)由兩條總線控制:一條雙向串行資料線(SDA) ,一條串行時鐘線 (SCL),資料線即用來表示資料,時鐘線用于資料收發同步,
(2)I2C總線上可掛在多個 I2C通訊的設備,如圖所示,
(3)每個連接到總線的設備都有一個獨立的地址,主機可以利用這個地址進行不同設備之
間的訪問,
(4)總線通過上拉電阻接到電源,當 I2C 設備空閑時,會輸出高阻態,而當所有設備都空
閑,都輸出高阻態時,由上拉電阻把總線拉成高電平,
(5)多個主機同時使用總線時,為了防止資料沖突,會利用仲裁方式決定由哪個設備占用
總線,
(6)具有三種傳輸模式:標準模式傳輸速率為 100kbit/s ,快速模式為 400kbit/s ,高速模式
下可達 3.4Mbit/s,但目前大多 I2C 設備尚不支持高速模式,
二、協議層
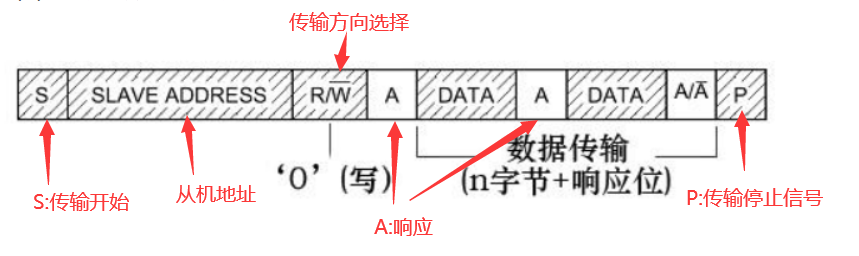
1、I2C基本讀寫程序:陰影部分代表資料由主機傳輸至從機,無陰影部分相反
(1)主機寫資料到從機
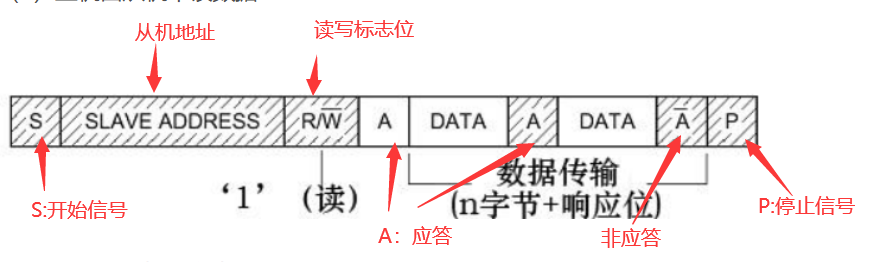
(2)主機由從機中讀資料
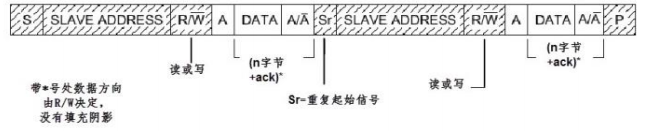
(3)I2C 通訊復合格式
簡單理解,當配置I2C完成后,發出開始信號(S),主機開始廣播某特定地址的從機(SLAVE ADDERSS),并給出要做出的操作(R/W),當從機收到主機的廣播地址后,會通過內部地址比較器與自身地址比較,如果主機不是呼叫自己,那么自身保持“高阻”不接受應答,若從機發現主機呼叫的是自己,那么將SDA和SCL總線拉低,表示占用總線,接受回應并產生應答信號,執行讀寫操作,
若執行的是寫操作,參考圖(1)當從機發出應答信號給主機,主機得到了應答后,開始給該從機發送資料,從機獲取資料,應答主機(告訴主機 :自己收到了資料),如此回圈主機一直發送資料給從機,直到從機發出“非應答信號”(資料夠了,我不要了,停止吧)主機發出停止信號,表示停止發送,
若執行的是讀操作,參考圖(2)當從機發出應答信號給主機,并發送主機需要的資料DATA,當主機接受到來自從機的資料DATA后,會應答從機(表示:好的,你的資料我已接受,你繼續),如此回圈,一直接受資料,知道主機發出“非應答信號”(表示:感謝,我的資料已經夠了,你停把),然后給從機發出停止信號,
對于復合操作,參考(1)(2).
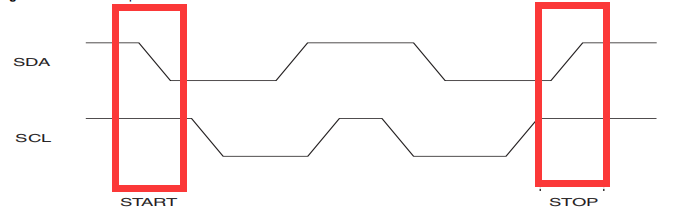
2、通訊的起始和停止位
起始(S)和停止§信號是兩種特殊的狀態,當 SCL 線是高電平時 SDA 線從高電平向低電平切換,這個情況表示通訊的起始,當 SCL 是高電平時 SDA 線由低電平向高電平切換,表示通訊的停止,起始和停止信號一般由主機產生,
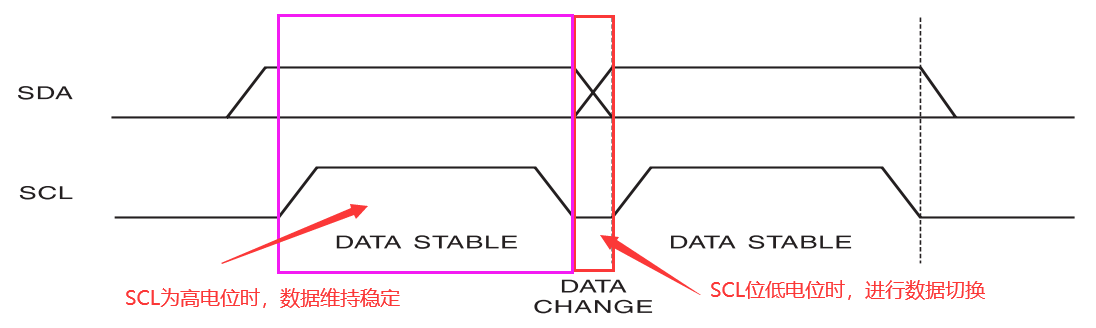
3、資料有效性
I2C 使用 SDA 信號線來傳輸資料,使用 SCL 信號線進行資料同步,SDA資料線在 SCL 的每個時鐘周期傳輸一位資料,傳輸時,SCL 為高電平的時候 SDA 表示的資料有效,即此時的 SDA 為高電平時表示資料“1”,為低電平時表示資料“0”,當 SCL為低電平時,SDA 的資料無效,一般在這個時候 SDA 進行電平切換,為下一次表示資料做好準備,
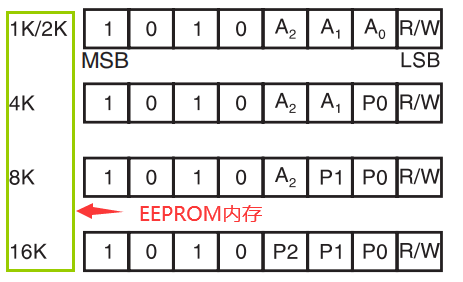
4、地址及資料方向
I2C 總線上的每個設備都有自己的獨立地址,主機發起通訊時,通過 SDA 信號線發送設備地址(SLAVE_ADDRESS)來查找從機,I2C 協議規定設備地址可以是 7 位或 10 位,實際中 7 位的地址應用比較廣泛,緊跟設備地址的一個資料位用來表示資料傳輸方向,它是資料方向位(R/W),第 8 位或第 11 位,資料方向位為“1”時表示主機由從機讀資料,該位為“0”時表示主機向從機寫資料,(下圖以七位地址為例)
5、回應
I2C 的資料和地址傳輸都帶回應,回應包括“應答(ACK)”和“非應答(NACK)”兩種信號,作為資料接收端時,當設備(無論主從機)接收到 I2C 傳輸的一個位元組資料或地址后,若希望對方繼續發送資料,則需要向對方發送“應答(ACK)”信號,發送方會繼續發送下一個資料;若接收端希望結束資料傳輸,則向對方發送“非應答(NACK)”信號,發送方接收到該信號后會產生一個停止信號,結束信號傳輸,
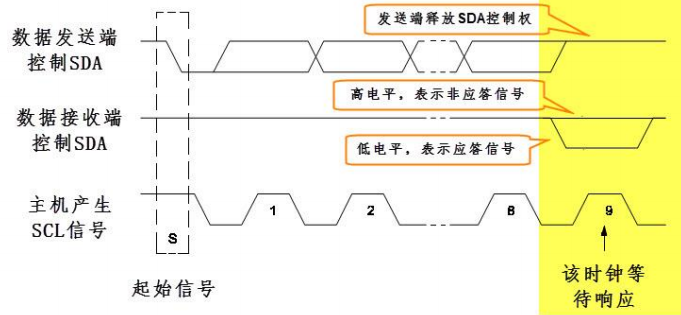
傳輸時主機產生時鐘,在第 9 個時鐘時,資料發送端會釋放 SDA 的控制權,由資料接
收端控制 SDA,若 SDA 為高電平,表示非應答信號(NACK),低電平表示應答信號(ACK),
三、 通訊程序
對于實作I2C通訊,該部分十分重要,編程程序基本都是按照下圖進行操作
1、主發送器
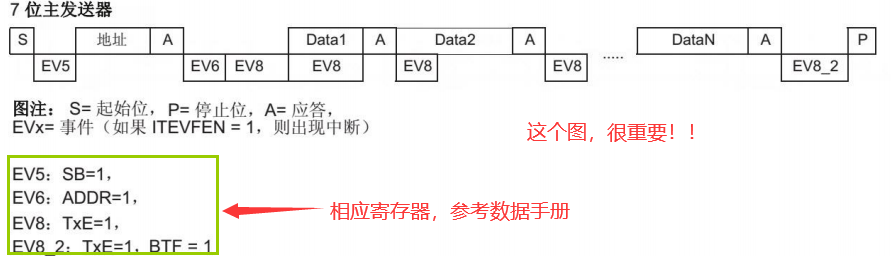
流程:
(1)控制產生起始信號(S),它產生事件“EV5”,并會對 SR1 暫存器的“SB”位置 1,表示起始信號已經發送;
(2)發送設備地址,若有從機應答,則產生事件“EV6”及“EV8”,這時 SR1 暫存器的“ADDR”位及“TXE”位被置 1,ADDR 為 1 表示地址已經發送,TXE 為 1 表示資料暫存器為空;
(3)以上步驟正常執行并對 ADDR 位清零后,我們往 I2C 的“資料暫存器 DR”寫入要發送的資料,這時 TXE 位會被重置 0,表示資料暫存器非空,I2C 外設通過SDA 信號線一位位把資料發送出去后,又會產生“EV8”事件,即 TXE 位被置 1,重復這個程序,可以發送多個位元組資料;
(4)當我們發送資料完成后,控制 I2C 設備產生一個停止信號(P),這個時候會產生EV8_2 事件,SR1 的 TXE 位及 BTF 位都被置 1,表示通訊結束,
假如我們使能了 I2C 中斷,以上所有事件產生時,都會產生 I2C 中斷信號,進入同一個中斷服務函式,到 I2C 中斷服務程式后,再通過檢查暫存器位來判斷是哪一個事件,
2、主接收器
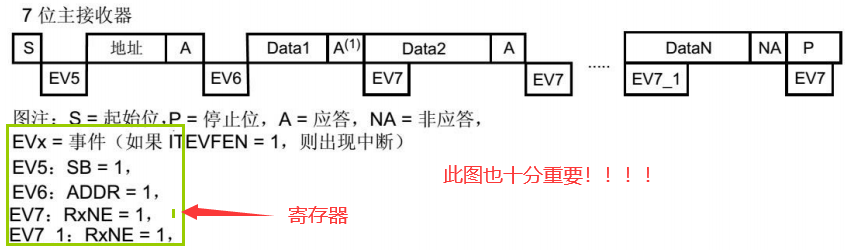
流程:
(1) 同主發送流程,起始信號(S)是由主機端產生的,控制發生起始信號后,它產生事
件“EV5”,并會對 SR1 暫存器的“SB”位置 1,表示起始信號已經發送;
(2) 緊接著發送設備地址并等待應答信號,若有從機應答,則產生事件“EV6”這時
SR1 暫存器的“ADDR”位被置 1,表示地址已經發送,
(3) 從機端接收到地址后,開始向主機端發送資料,當主機接收到這些資料后,會產
生“EV7”事件,SR1 暫存器的 RXNE 被置 1,表示接收資料暫存器非空,我們
讀取該暫存器后,可對資料暫存器清空,以便接收下一次資料,此時我們可以控
制 I2C 發送應答信號(ACK)或非應答信號(NACK),若應答,則重復以上步驟接收
資料,若非應答,則停止傳輸;
(4) 發送非應答信號后,產生停止信號(P),結束傳輸,
看到這里的小伙伴,恭喜你,你的耐力不錯,竟然看完了這么多的理論知識,你可能也會感慨,這I2C也忒難搞了吧,一會發送這個東西,一會又檢測另一個事件,要搞完一次 I2C通訊,豈不是要肝到天荒地老,哈哈哈哈,不要擔心,其實很多作業,完全不需要我們做,官方已經為我們寫好了大量的庫,我們只需要進行“CV編程開發”即可,再加上一點小小的理解,就可以很輕松的實作I2C通訊了,
按著步驟走很簡單的:
I2C_InitTypeDef 結構體:
typedef struct
{
uint32_t I2C_ClockSpeed;
uint16_t I2C_Mode;
uint16_t I2C_DutyCycle;
uint16_t I2C_OwnAddress1;
uint16_t I2C_Ack;
uint16_t I2C_AcknowledgedAddress;
}I2C_InitTypeDef;
把每個結構體成員都配置一下就好,具體怎么配置,.h檔案里都有對應的宏,Ctrl+CV即可
OKK說完這些,程式猿的事情,當然要代碼交流了!
(1)void I2C_GPIO_Config(void)
void I2C_GPIO_Config(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
//初始化 IIC_GPIO 時鐘
RCC_APB2PeriphClockCmd(I2Cx_GPIO_SCL_Clk|I2Cx_GPIO_SDA_Clk,ENABLE);
//初始化IIC_SCL
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_OD;
GPIO_InitStruct.GPIO_Pin = I2Cx_GPIO_SCL_Pin;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(I2Cx_GPIO_SCL_Port,&GPIO_InitStruct);
//初始化IIC_SDA
GPIO_InitStruct.GPIO_Pin = I2Cx_GPIO_SDA_Pin;
GPIO_Init(I2Cx_GPIO_SDA_Port,&GPIO_InitStruct);
}
(2)void I2C_GPIO_Config(void)
void I2C_GPIO_Config(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
//初始化 IIC_GPIO 時鐘
RCC_APB2PeriphClockCmd(I2Cx_GPIO_SCL_Clk|I2Cx_GPIO_SDA_Clk,ENABLE);
//初始化IIC_SCL
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_OD;
GPIO_InitStruct.GPIO_Pin = I2Cx_GPIO_SCL_Pin;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(I2Cx_GPIO_SCL_Port,&GPIO_InitStruct);
//初始化IIC_SDA
GPIO_InitStruct.GPIO_Pin = I2Cx_GPIO_SDA_Pin;
GPIO_Init(I2Cx_GPIO_SDA_Port,&GPIO_InitStruct);
}
(3)void I2C_Config(void)
void I2C_Config(void)
{
I2C_InitTypeDef I2C_InitStruct;
I2C_GPIO_Config();//配置SDA和SCL GPIO
//初始化IIC外設時鐘
RCC_APB1PeriphClockCmd(DEBUG_I2Cx_Clk,ENABLE);
//初始化IIC 結構體
I2C_InitStruct.I2C_Ack = I2C_Ack_Enable; //使能應答
I2C_InitStruct.I2C_AcknowledgedAddress = I2C_AcknowledgedAddress_7bit; //IIC 7 位尋址
I2C_InitStruct.I2C_ClockSpeed = DEBUG_I2C_ClockSpeed;//通信速率 400k
I2C_InitStruct.I2C_DutyCycle = I2C_DutyCycle_2; //占空比 1/2
I2C_InitStruct.I2C_Mode = I2C_Mode_I2C; //選擇IIC模式
I2C_InitStruct.I2C_OwnAddress1 = DEBUG_I2Cx_Addr;//輸入主機地址,與從機有所區別即可正常通信
I2C_Init(DEBUG_I2Cx_Port,&I2C_InitStruct);
//使能IIC
I2C_Cmd(DEBUG_I2Cx_Port, ENABLE);
}
*(4)void I2C_ByteWrite(uint8_t pBuffer, uint8_t WriteAddr)
void I2C_ByteWrite(uint8_t *pBuffer, uint8_t WriteAddr)
{
//讀一個位元組
while(I2C_GetFlagStatus(DEBUG_I2Cx_Port, I2C_FLAG_BUSY));
//發送Start信號
I2C_GenerateSTART(DEBUG_I2Cx_Port,ENABLE);
//等待EV5事件:IIC開始信號已經發出 (I2C_SR1內SB位置1)
while(I2C_CheckEvent(DEBUG_I2Cx_Port,I2C_EVENT_MASTER_MODE_SELECT)==ERROR);
//發送7位“EEPROM地址”
I2C_Send7bitAddress(DEBUG_I2Cx_Port,DEBUG_EEPROM_Addr,I2C_Direction_Transmitter);
//等待EV6事件:表示地址已經發送
while(I2C_CheckEvent(DEBUG_I2Cx_Port,I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED)==ERROR);
//寫入EEPROM內將要寫入的地址資料
I2C_SendData(DEBUG_I2Cx_Port,WriteAddr);
//等待EV8事件:回傳SET則資料暫存器DR為空
while(I2C_CheckEvent(DEBUG_I2Cx_Port,I2C_EVENT_MASTER_BYTE_TRANSMITTED)==ERROR);
//寫入資料
I2C_SendData(DEBUG_I2Cx_Port,*pBuffer);
//等待EV8事件:回傳SET則資料暫存器DR為空
while(I2C_CheckEvent(DEBUG_I2Cx_Port,I2C_EVENT_MASTER_BYTE_TRANSMITTED)==ERROR);
//一個位元組發送完成,發送Stop信號
I2C_GenerateSTOP(DEBUG_I2Cx_Port, ENABLE);
}
*(5)void I2C_ByteRead(uint8_t pBuffer, uint8_t ReadAddr);
/**
* @brief 從EEPROM里面讀取一塊資料
* @param
* @arg pBuffer:存放從EEPROM讀取的資料的緩沖區指標
* @arg WriteAddr:接收資料的EEPROM的地址
* @retval 無
*/
void I2C_ByteRead(uint8_t *pBuffer, uint8_t ReadAddr)
{
//發送Start信號
I2C_GenerateSTART(DEBUG_I2Cx_Port,ENABLE);
//等待EV5事件:IIC開始信號已經發出 (I2C_SR1內SB位置1)
while(I2C_CheckEvent(DEBUG_I2Cx_Port,I2C_EVENT_MASTER_MODE_SELECT)==ERROR);
//發送7位“EEPROM地址”
I2C_Send7bitAddress(DEBUG_I2Cx_Port,DEBUG_EEPROM_Addr,I2C_Direction_Transmitter);
//等待EV6事件:表示地址已經發送
while(I2C_CheckEvent(DEBUG_I2Cx_Port,I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED)==ERROR);
//寫入EEPROM記憶體“單元地址”
I2C_SendData(DEBUG_I2Cx_Port,ReadAddr);
//等待EV8事件:資料暫存器DR為空 ,地址資料已經發送
while(I2C_CheckEvent(DEBUG_I2Cx_Port,I2C_EVENT_MASTER_BYTE_TRANSMITTED)==ERROR);
//重新發送Start信號
I2C_GenerateSTART(DEBUG_I2Cx_Port,ENABLE);
//等待EV5事件
while(I2C_CheckEvent(DEBUG_I2Cx_Port,I2C_EVENT_MASTER_MODE_SELECT)==ERROR);
//發送7位“EEPROM地址”
I2C_Send7bitAddress(DEBUG_I2Cx_Port,DEBUG_EEPROM_Addr,I2C_Direction_Receiver);//注意方向
//等待EV6事件(接收):表示地址已經發送
while(I2C_CheckEvent(DEBUG_I2Cx_Port,I2C_EVENT_MASTER_RECEIVER_MODE_SELECTED)==ERROR);//注意方向
//產生非應答
I2C_AcknowledgeConfig(DEBUG_I2Cx_Port, DISABLE);
//發送Stop信號
I2C_GenerateSTOP(DEBUG_I2Cx_Port, ENABLE);
//等待EV7事件, BUSY, MSL and RXNE flags
while(I2C_CheckEvent(DEBUG_I2Cx_Port, I2C_EVENT_MASTER_BYTE_RECEIVED)==ERROR);
*pBuffer = I2C_ReceiveData(DEBUG_I2Cx_Port);
//重新初始化 為下次做準備
I2C_AcknowledgeConfig(DEBUG_I2Cx_Port, ENABLE);
}
(6)函式測驗
#include "stm32f10x.h"
#include "bsp_i2c.h"
#include "bsp_usart.h"
uint8_t I2C_Buf_Write[256];
uint8_t I2C_Buf_Read[256];
uint16_t i=0;
void delay(uint32_t count)
{
while(count--);
}
int main(void)
{
USART_Config();
I2C_Config();
for(i=0;i<256;i++)
{
I2C_Buf_Write[i] = i;
}
printf("\r\n 這是一個I2C外設(AT24C02)讀寫測驗例程 \r\n");
I2C_ByteWrite(&I2C_Buf_Write[2],0x55);
delay(0xffff);//因為STM32處理速度遠大400k 所以,等待寫入完成,
I2C_ByteRead(&I2C_Buf_Read[2],0x55);
printf("0x%x ", I2C_Buf_Read[2]);
while(1);
}
//讀寫函式為測驗學習使用,所有還有很多不完善的地方,改進中.....

在實作程序中,對應的I2Cx、時鐘、GPIO選取等,全都在"bsp_i2c.h"、"bsp_usart.h",
你們可以結合自己的硬體,配置對應的引數,串口配置,是為了除錯方便,
#ifndef _BSP_I2C_H
#define _BSP_I2C_H
#include "stm32f10x.h"
#define I2Cx_GPIO_SCL_Port GPIOB
#define I2Cx_GPIO_SCL_Pin GPIO_Pin_6
#define I2Cx_GPIO_SCL_Clk RCC_APB2Periph_GPIOB
#define I2Cx_GPIO_SDA_Port GPIOB
#define I2Cx_GPIO_SDA_Pin GPIO_Pin_7
#define I2Cx_GPIO_SDA_Clk RCC_APB2Periph_GPIOB
#define DEBUG_I2Cx_Addr 0xB0
#define DEBUG_EEPROM_Addr 0xA0 //7位地址1010000
#define DEBUG_I2C_ClockSpeed 400000
#define DEBUG_I2Cx_Port I2C1
#define DEBUG_I2Cx_Clk RCC_APB1Periph_I2C1
void I2C_GPIO_Config(void);
void I2C_Config(void);
void I2C_ByteWrite(uint8_t *pBuffer, uint8_t WriteAddr);
void I2C_ByteRead(uint8_t *pBuffer, uint8_t WriteAddr);
#endif /*_BSP_I2C_H*/
參考書籍:《【野火?】零死角玩轉STM32—F103霸道_V2》,有需要的小伙伴,可以留下你的郵箱,我會第一時間發過去,《AT24C02資料手冊》,
關于 模擬 “軟體I2C” ,過幾天我會再寫一篇,大家可以先點個關注(⊙o⊙)
歡迎交流探討,
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/257530.html
標籤:其他
上一篇:七段碼(藍橋