串口通訊——基礎知識
- 前言
- 一、通訊協議
- 1.并行通訊
- 2.串行通訊
- 同步串行通訊
- 異步串行通訊
- 3.通訊傳輸方向
- 二、STM32的串口通訊
- 1.串口收發單元
- 2.串口轉TTL串口模塊
- 三、HAL庫外設初始化設定
- 1.串口的資料型別定義
- ①外設句柄
- ②串口初始化
- 2.串口的設定一般步驟
- 總結
前言
??因為在最近有一個比賽要用到openMV和STM32F407的通訊,所以這幾天一直在學通訊方式,因為學校還沒有開設51的課程,我是直接越過了51直接學STM的很多單片機知識有所缺失,如果有專業錯誤還請指正,所以學起來真的是例外的艱難,這篇文章把這幾天的學習結果進行一個總結,
一、通訊協議
??所謂通訊就是將兩個設備進行連接,然后通過某種方式進行資訊交換,而按照資料傳輸方式的不同,又可以分為串行通訊和并行通訊兩類,串行通訊是將資料逐位進行傳輸,而并行是將多位資料同時傳輸,
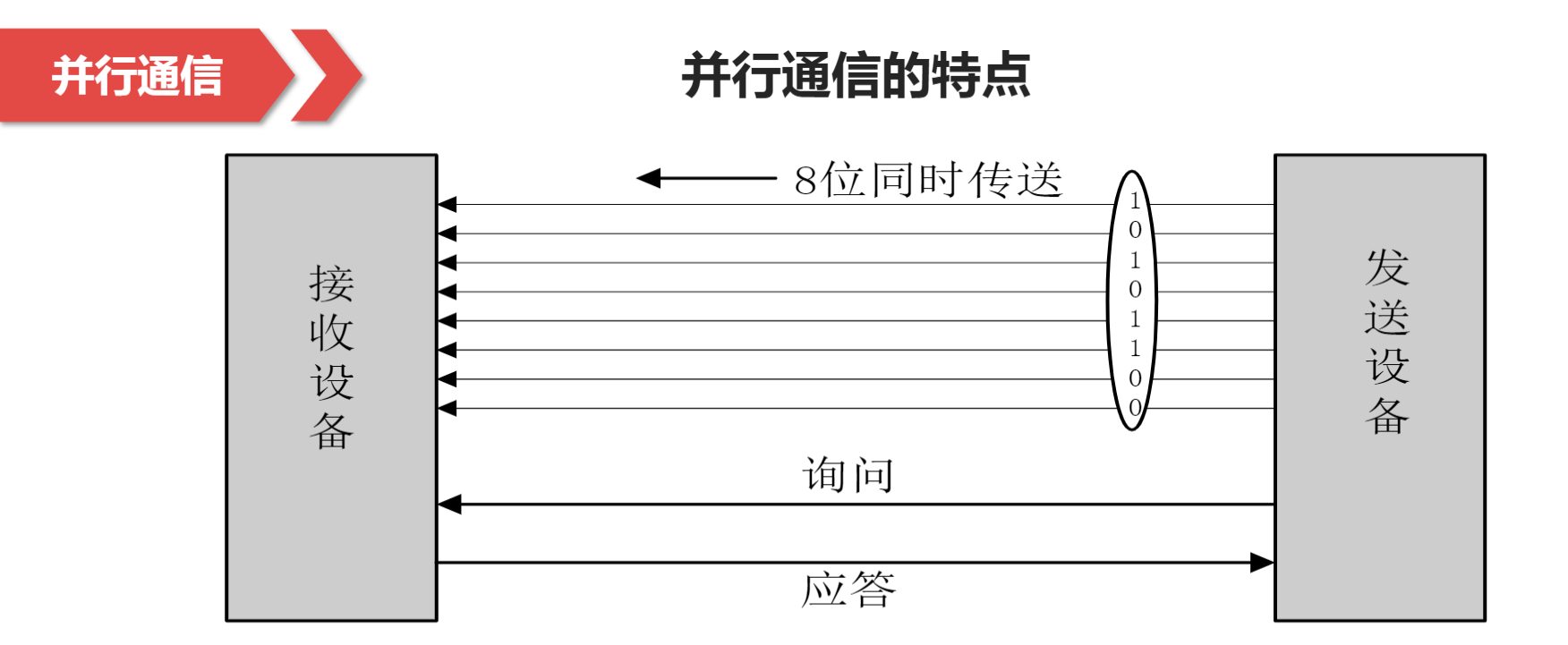
1.并行通訊
??并行通訊如下圖所示,并行一次性將8位資料一起傳輸給接收設備,這樣一趟就可以傳輸8個資料,當然這樣的優缺點也十分的明顯,如:多位資料同時傳輸,傳輸控制簡單,傳輸速度快,但是占用的引腳資源較多,所以在單片機同時控制多個外設的時候,引腳資源十分的缺乏,并行通訊顯然不是一個很好的選擇,
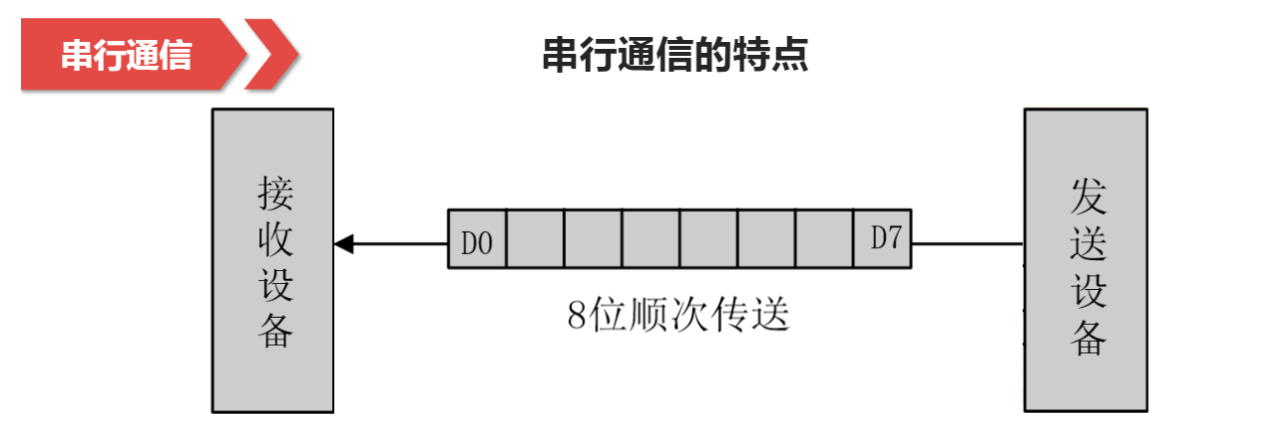
2.串行通訊
??并行通訊如下圖所示,串行通訊一次只傳送一位資料給接收設備,顯而易見串行通訊占用的引腳資源少,但同時犧牲了傳輸速率,在引腳資源匱乏的情況下這顯然是大多數外設設備的最佳選擇,同時串行通信按照其不同的資料同步方式,分為同步和異步兩種方式,
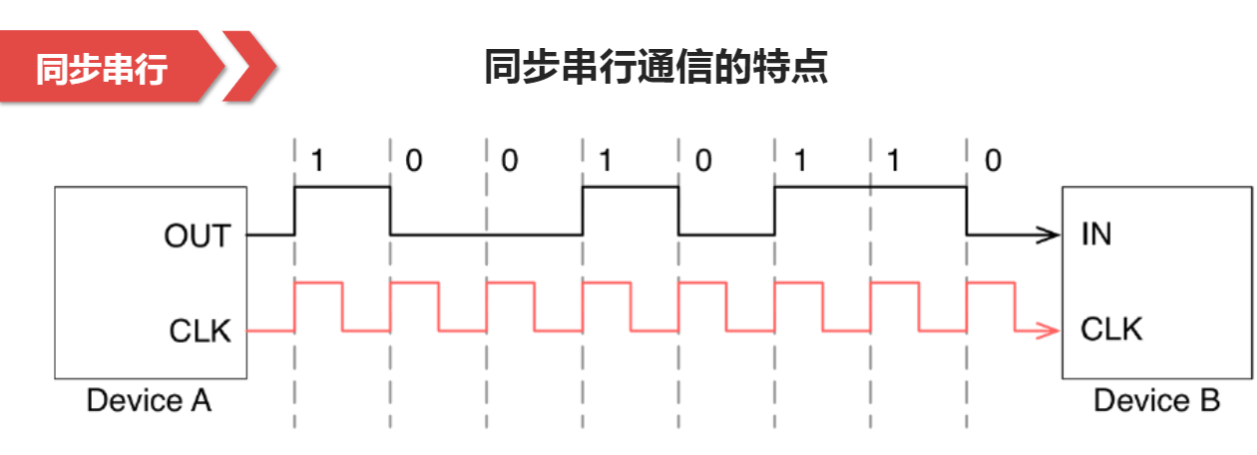
同步串行通訊
??資料傳輸以資料塊或一組字符為單位,在一個資料塊內,字符與字符無間隔,收發雙方依靠獨立的時鐘線進行信號的同步,適用于大批量的資料傳輸,
異步串行通訊
??資料傳輸以單個字符為單位,字符和字符之間的間隙任意,字符內部每一位持續的時間相同,收發雙方沒有專門的時鐘信號,而通過依靠事先約定的字符格式和通信速率(也叫波特率)來完成通信,
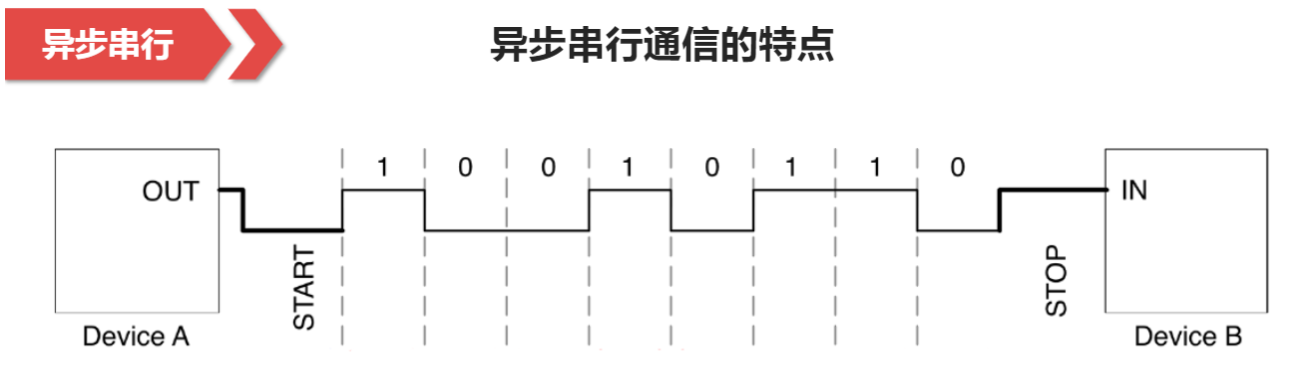
??異步串行通信一般來說有一個約定的字符格式(決定字符中資料的傳輸形式),字符格式由起始位,資料位,校驗位,停止位組成,而通常我們大多數情況下設定1位起始位,8位資料位,無奇偶校驗和1位停止位,
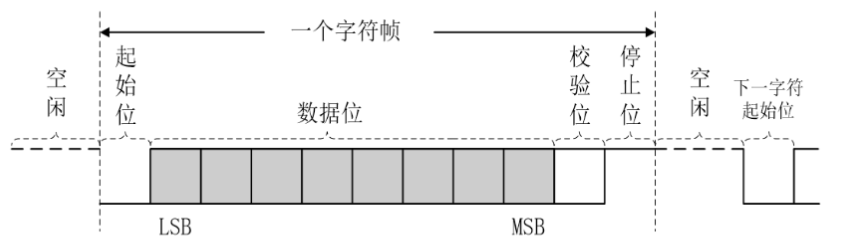
波特率(決定字符中每一位資料的持續時間):表示每秒傳送二進制數碼的位數,以bit/s(或bps)為單位,
常用波特率為9600、19200、38400、57600、112500;
注意:波特率為同一個設備共同約定的一個傳輸速率,所以接收設備和發送設備的波特率應設定為同一個值,

假設:接收端的采樣時鐘為波特率的16倍(接收本質:資料采集)
資料接收程序(如上所示):
1、接收程序由起始位的下降沿啟動
2、接收端等待8個時鐘周期,以便建立一個接近位元率周期中間的采樣點
3、接收端等待16個時鐘周期,使其進入第一個資料位周期的中點
4、第一個資料位被采樣并儲存在接收暫存器中
5、串口模塊在采樣第二個資料位之前等待另外16個時鐘周期
6、重復此程序,直到所有資料為都被采樣和儲存
7、由停止位和上升沿使資料線回傳到空閑狀態,
3.通訊傳輸方向
通訊傳輸主要由三種模式分別為單工,半雙工和全雙工
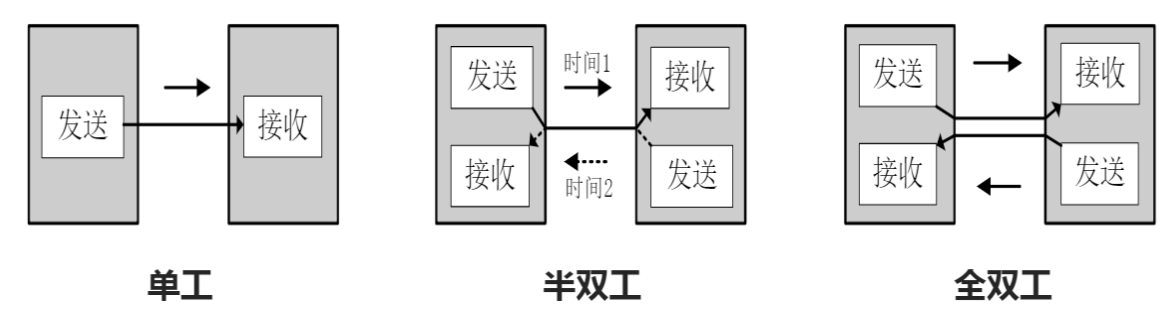
單工:傳輸僅能沿著一個方向,不能實作反向傳輸,只有一條通信線路
半雙工:傳輸可以沿著兩個方向,但不能同時接識訓者發送,只能分時進行,同樣只有一條通信線路,
全雙工:資料可以同時進行雙向傳輸,具有兩條通信線路,(通常用的UART即串口就是全雙工)
二、STM32的串口通訊
1.串口收發單元
??串口收發單元主要利用資料暫存器DR,發送引腳TX,接收引腳RX,以及三個通信狀態位TXE、TC和RXNE來完成資料的接收和發送,其作業分布圖如下所示,
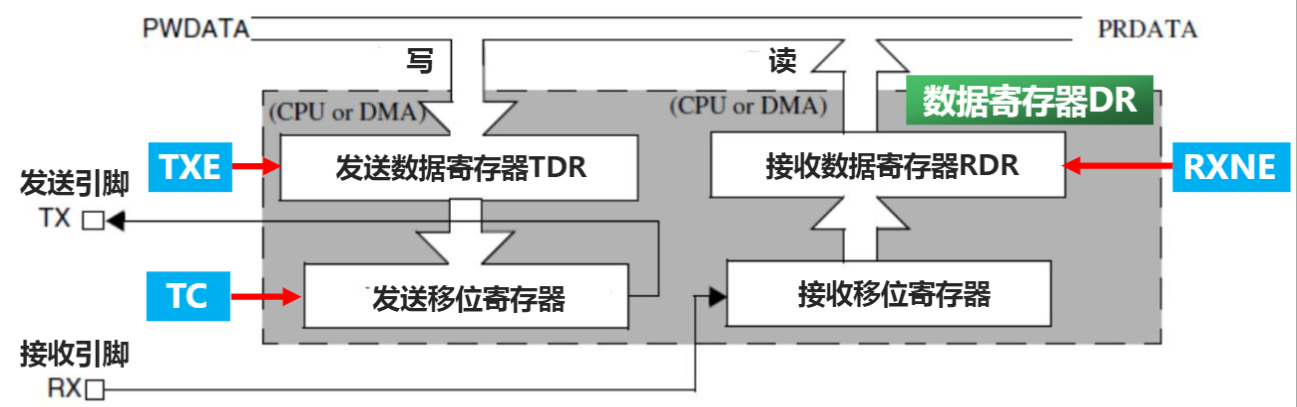
??資料暫存器DR在硬體上分為TDR和RDR兩個暫存器,通過資料的流向進行區分,在結構設計上采用了雙緩沖結構;
??發送時,資料通過資料總線送入TDR暫存器,然后傳送到發送移位暫存器完成資料轉換,從并行資料轉為串行資料,最后通過TX引腳發送
接收時,資料通過RX引腳逐位送入接收移位暫存器,8位資料接收完成后,送入RDR暫存器,供用戶讀取,
??這種方法可以在資料收發的程序中,同時寫入新的資料或讀取已接受的資料,提高資料的傳輸效率,
通信狀態標志位
| 標志位 | 含義 |
|---|---|
| TXE | 資料暫存器空標志,當TDR暫存器的內容已經傳送到發送移位暫存器時,該位由硬體置1,如果串口控制暫存器CR1中的TXEIE為1,將會觸發發送資料暫存器空中斷,注:當TXE置1時,資料還有可能在發送, |
| TC | 發送完成標志,當發送移位暫存器的內容發送完成,同時TDR暫存器也為空時,該為由硬體置1,表示本次資料傳輸已經完成,如果串口控制暫存器CR1中的TCIE位為1,將會觸發發送完成中斷,注:當TC置1時,資料才是真正地發送完成, |
| RXNE | 接收資料暫存器不為空標志,當移位暫存器的內容已經傳送到接收資料暫存器RDR時,該位由硬體置1.如果串口控制暫存器CR1中的RXNEIE位為1,將會觸發接收暫存器不為空中斷, |
??在輪詢方式下,可以直接檢測標志位;
??在中斷方式下,需要在中斷服務程式中通過檢測不同的中斷標志位,來判斷中斷型別,然后執行后續的任務處理,
2.串口轉TTL串口模塊
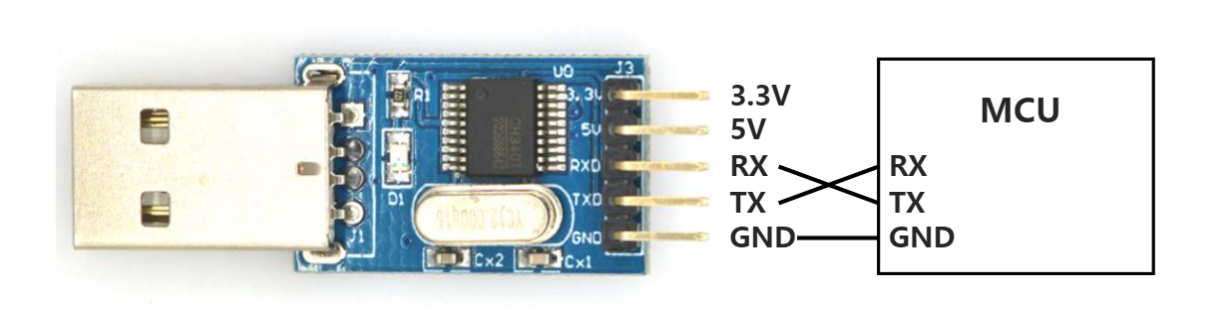
??一般而言,我們要將電腦和單片機連接,其主要的方式就是利用USB口和單片機的MCU進行一個串口通訊,而電腦時USB口的所以我們需要一個USB轉TTL模塊才能將MCU和電腦用USB進行連接,
??一般來說我們買過來的單片機是已經具備USB轉TTL功能的了,而USB轉TTL模塊中最重要的就是中間那塊名為CH340或CH341的芯片了,我們只有在電腦上安裝對應的驅動程式我們才能讓電腦順利的讀取到MCU傳來的電平信號在,在連接上單片機后,可以打開電腦的設備管理器(win+S搜索設備管理器即可),如果有COMx的虛擬串口則說明安裝成功了,
??在連接上,所有的串口通信都需要共地相接(為確保電平的一致),且TX引腳與對方的RX相接,RX引腳與對方的TX引腳相接,
三、HAL庫外設初始化設定
1.串口的資料型別定義
①外設句柄
句柄(基本上我現在學過的外設都由)一般由五個部分組成(不同的外設設定方法也不盡相同,以下設定為串口的組成):
(1)Instance(外設實體)——>UART1/UART2,,,,,,
(2)Initialization(初始化配置引數)——>波特率/字符格式
(3)Status(外設狀態)——>Ready/Busy/Error
(4)DMA通道句柄(DMA通道句柄)——>Linked to DMA channel
(5)I/O Buffer(I/O緩沖區)——>I/O buffer on address
CubeMX生成HAL庫的串口句柄:
typedef struct __UART_HandleTypeDef
{
USART_TypeDef *Instance; /*!<串口暫存器基地址定義*/
UART_InitTypeDef Init; /*!<串口初始化資料型別*/
uint8_t *pTxBuffPtr; /*!<串口發送緩沖區首地址*/
uint16_t TxXferSize; /*!<串口待發送資料個數*/
__IO uint16_t TxXferCount; /*!<串口發送資料計數器*/
uint8_t *pRxBuffPtr; /*!<串口接識訓沖區首地址*/
uint16_t RxXferSize; /*!<串口待接收資料個數*/
__IO uint16_t RxXferCount; /*!<串口待接收資料計數器*/
DMA_HandleTypeDef *hdmatx; /*!<串口發送的DMA通道外設句柄定義 */
DMA_HandleTypeDef *hdmarx; /*!<串口接收的DMA通道定義*/
HAL_LockTypeDef Lock; /*!<保護鎖型別定義*/
__IO HAL_UART_StateTypeDef gState; /*!<串口全域狀態和發送狀態資訊*/
__IO HAL_UART_StateTypeDef RxState; /*!<串口接收狀態資訊*/
__IO uint32_t ErrorCode; /*!<串口錯誤代碼*/
#if (USE_HAL_UART_REGISTER_CALLBACKS == 1)
void (* TxHalfCpltCallback)(struct __UART_HandleTypeDef *huart); /*!< UART Tx Half Complete Callback */
void (* TxCpltCallback)(struct __UART_HandleTypeDef *huart); /*!< UART Tx Complete Callback */
void (* RxHalfCpltCallback)(struct __UART_HandleTypeDef *huart); /*!< UART Rx Half Complete Callback */
void (* RxCpltCallback)(struct __UART_HandleTypeDef *huart); /*!< UART Rx Complete Callback */
void (* ErrorCallback)(struct __UART_HandleTypeDef *huart); /*!< UART Error Callback */
void (* AbortCpltCallback)(struct __UART_HandleTypeDef *huart); /*!< UART Abort Complete Callback */
void (* AbortTransmitCpltCallback)(struct __UART_HandleTypeDef *huart); /*!< UART Abort Transmit Complete Callback */
void (* AbortReceiveCpltCallback)(struct __UART_HandleTypeDef *huart); /*!< UART Abort Receive Complete Callback */
void (* WakeupCallback)(struct __UART_HandleTypeDef *huart); /*!< UART Wakeup Callback */
void (* MspInitCallback)(struct __UART_HandleTypeDef *huart); /*!< UART Msp Init callback */
void (* MspDeInitCallback)(struct __UART_HandleTypeDef *huart); /*!< UART Msp DeInit callback */
#endif /* USE_HAL_UART_REGISTER_CALLBACKS */
} UART_HandleTypeDef;
②串口初始化
?在CubeMX生成的HAL庫中可以在usart.c檔案夾中找到UART_HandleTypeDef huart1;這樣的定義,
??然后,在void MX_USART1_UART_Init(void)這樣的函式中就是對串口1的字符格式進行設定,這一步我們在使用CubeMX配置相關引數的時候就已經完成了,所以自動生成的代碼也已經完成相關字符格式的配置,不再需要我們在代碼中再次撰寫,
CubeMX生成HAL庫的串口初始化結構體:
typedef struct
{
uint32_t BaudRate; /*!<設定通信波特率*/
uint32_t WordLength; /*!<設定通信字符中資料位的位數*/
uint32_t StopBits; /*!<設定通信字符中停止位的位數*/
uint32_t Parity; /*!<設定奇偶校驗模式*/
uint32_t Mode; /*!<設定接識訓發送模式是否使能或禁能*/
uint32_t HwFlowCtl; /*!<設定硬體流控是否使能或禁能*/
uint32_t OverSampling; /*!<設定采樣頻率和信號傳輸頻率的比例*/
} UART_InitTypeDef;
| 結構體成員變數 | 取值范圍 | 含義 |
|---|---|---|
| WordLength | UART_WORDLENGTH_8H | 資料位長度為8位 |
| ------ | UART_WORDLENGTH_8H | 資料位長度為9位 |
| StopBits | UART_STOPBITS_1 | 停止位長度為1位 |
| ------ | UART_STOPBITS_2 | 停止位長度為2位 |
| Parity | UART_PARITY_NONE | 無奇偶校驗 |
| ------ | UART_PARITY_EVEN | 偶校驗 |
| ------ | UART_PARITY_ODD | 奇校驗 |
| Mode | UART_MODE_RX | 串口僅處于接收模式,只能接收資料,不能發送資料 |
| ------ | UART_MODE_TX | 串口僅處于發送模式,只能發送資料,不能接收資料 |
| ------ | UART_MODE_TX_RX | 串口處于接收和發送模式,可以同時收發資料 |
| HwFlowCtrl | UART_HWCONTROL_NONE | 無硬體流控 |
| ------ | UART_HWCONTROL_RTS | 使能“請求發送(RTS)”引腳 |
| ------ | UART_HWCONTROL_CTS | 使能“請求發送(CTS)”引腳 |
| ------ | UART_HWCONTROL_RTS_CTS | 使能“請求發送(RTS)”和“允許發送(CTS)”引腳 |
| OverSampling | UART_OVERSAMPLING_16 | 采樣頻率是信號傳輸頻率的16倍 |
| ------ | UART_OVERSAMPLING_8 | 采樣頻率是信號傳輸頻率的8倍, |
??硬體流控可以控制資料傳輸的行程,防止資料丟失,該功能主要在收發雙方傳輸速度不匹配的時候使用,
2.串口的設定一般步驟
在CubeMX自動生成的HAL庫代碼中按照如下步驟配置引腳
HAL_UART_Init ( ) Start
{
?將句柄結構中的初始化引數存入暫存器
??HAL_UART_MspInit ( ) Start
??{
??完成時鐘、引腳等初始化
??}
??HAL_UART_MspInit ( ) End
}
HAL_UART_Init ( ) End
??而我們自己在CubeMX中自己寫入的初始化引數將會通過 MX_USART1_UART_Init()寫入暫存器,引腳初始化配置通過MX_GPIO_Init()寫入暫存器,所以在主函式中要呼叫這兩個函式進行初始化,但在CubeMX生成的代碼中已經完成了呼叫,無需用戶再完成,此配置可以在CubeMX生成的usart.c檔案中找到串口設定,
??以下貼出CubeMX生成的我對uart1的配置:
void MX_USART1_UART_Init(void)
{
huart1.Instance = USART1; //使用的串口為串口一
huart1.Init.BaudRate = 115200; //115200的波特率
huart1.Init.WordLength = UART_WORDLENGTH_8B; //8位停止位
huart1.Init.StopBits = UART_STOPBITS_1; //1位停止位
huart1.Init.Parity = UART_PARITY_NONE; //無奇偶校驗
huart1.Init.Mode = UART_MODE_TX_RX; //同時使用接收和發送功能
huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE; //無硬體流控
huart1.Init.OverSampling = UART_OVERSAMPLING_16; //采樣頻率是信號傳輸頻率的16倍
if (HAL_UART_Init(&huart1) != HAL_OK)
{
Error_Handler();
}
}
void HAL_UART_MspInit(UART_HandleTypeDef* uartHandle)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
if(uartHandle->Instance==USART1)
{
/* USER CODE BEGIN USART1_MspInit 0 */
/* USER CODE END USART1_MspInit 0 */
/* USART1 clock enable */
__HAL_RCC_USART1_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
/**USART1 GPIO Configuration
PA9 ------> USART1_TX
PA10 ------> USART1_RX
*/
GPIO_InitStruct.Pin = GPIO_PIN_9|GPIO_PIN_10; //USART1外設對應引腳為(GPIOA9和GPIOA10)
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP; //開啟串口復用
GPIO_InitStruct.Pull = GPIO_NOPULL; //無上下拉
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH; //采用高速時鐘
GPIO_InitStruct.Alternate = GPIO_AF7_USART1; //GPIO復用為串口功能
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
/* USART1 interrupt Init */
HAL_NVIC_SetPriority(USART1_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(USART1_IRQn);
/* USER CODE BEGIN USART1_MspInit 1 */
/* USER CODE END USART1_MspInit 1 */
}
}
總結
??以上是我在串口學習之前必須要弄懂的一些知識,不然自己學起來不太舒服,串口的知識內容有點太多了,而正好又趕上了春節,出去玩是在所難免的,所以學習進度更慢了,串口還有好幾種應用,等我找時間也寫寫筆記加深一下影響,等學完了,看看能不能和12864G通信,可以的話我會上傳對應檔案的,(但我覺得春節會玩瘋了,進度可能會被拉長)轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/258512.html
標籤:其他
上一篇:React學習-does not exist on type ‘Readonly<{}> & Readonly<{ children?: ReactNode; }>