本章的主要問題就是理解什么是Agent,如何根據特定問題構建出合適的Agent模型以及可以構建出什么樣的Agent的問題,
智能Agent
- 理性Agent
- 環境的性質
- Agent的結構
- 基于反射的Agent
- 基于模型的Agent
- 基于目標的Agent
- 基于效用的Agent
理性Agent
理性的判斷依賴于以下四個方面:
- 定義成功標準的性能度量(P)
- Agent 對環境的先驗知識(E)
- Agent可以完成的行動(A)
- Agent截止到此時的感知序列(S)
理性Agent的定義:對每一個可能的感知序列,根據已知的感知序列提供的證據和Agent具有的先驗知識,理性Agent應該選擇能使其性能度量最大化的行動,
環境的性質
考慮任務環境是理性Agent要“求解”的基本“問題”,
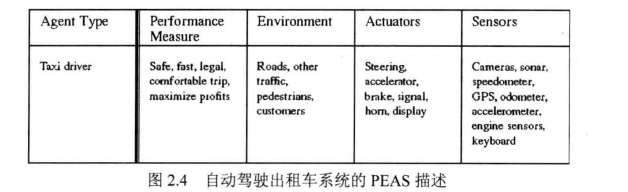
根據理性的定義,我們的任務環境也必須將上述的四個方面性能度量、環境·、Agent執行器、傳感器歸結在一起才能構建出合適的任務環境,(根據四方面的首字母定義該描述為PEAS描述)
簡單例子:自動駕駛出租車系統
- 性能度量:油耗、到達目的地的時間長短、安全性、乘客舒適度等等
- 環境:各種道路、路上的行人車輛、天氣等等
- 執行器:個人感覺可以理解成action,如踩油門,方向盤的控制,與顧客的交流等等
- 傳感器:主要是車上搭載的攝像頭來感知環境變化
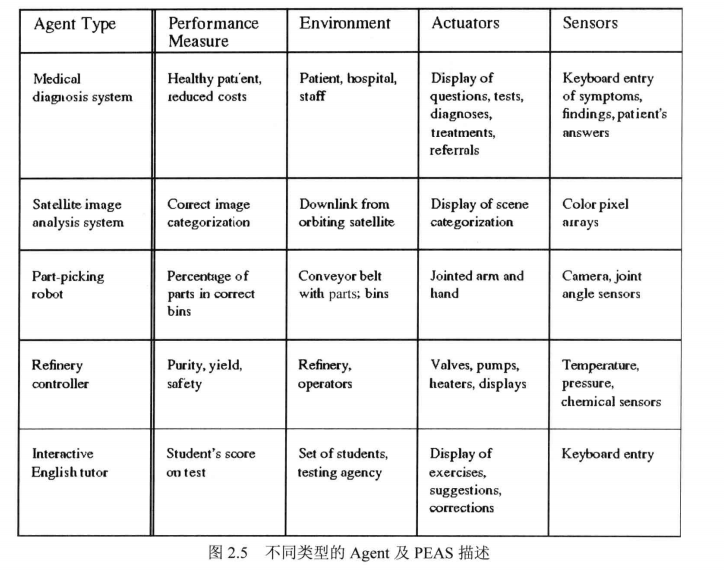
更多示例:
Agent的結構
Agent程式,它實作的是把感知資訊映射到行動的Agent 函式,
假設該程式要在某個具備物理傳感器和執行器的計算裝置上運行——我們稱為體系結構,
Agent =體系結構+程式
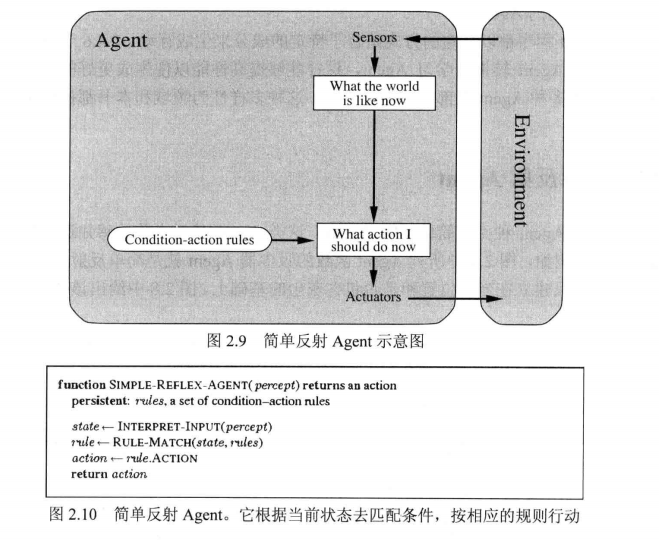
基于反射的Agent
這類Agent基于當前的感知和內置的規則集選擇行動,不關注感知歷史,雖然結構簡單,但只感知當前的資訊,對于許多需要考慮歷史對當前影響的場景是不適用的,
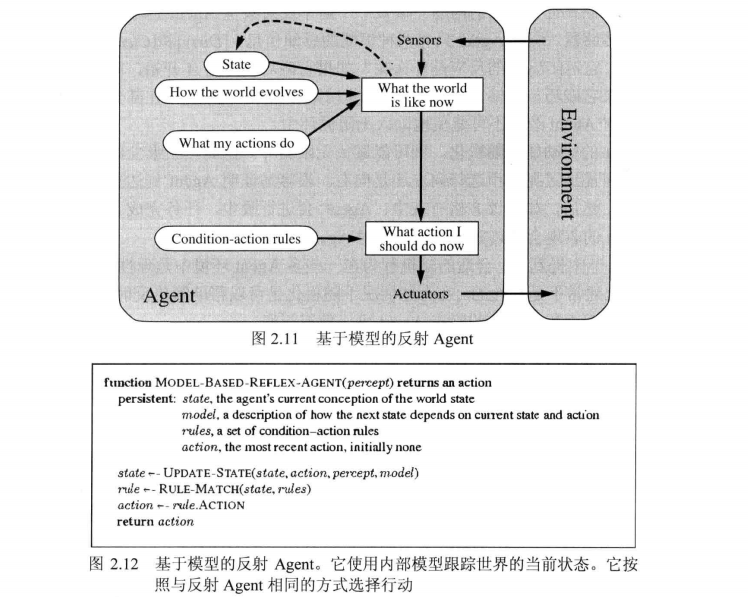
基于模型的Agent
這類Agent不僅僅是有規則集,還有它需要知道Agent的行動會對環境造成什么影響,即知道世界如何運轉,在內部需要有一個世界模型(model)
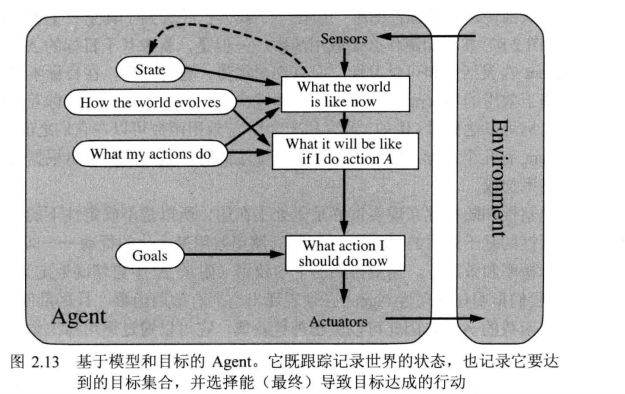
基于目標的Agent
這類Agent除了知道自己當前的狀態,還可以用目標資訊來描述想要達到的狀態,基于目標的Agent更加的明確,通過目標的指引,利用自己已知的模型和感知的資訊不斷更新自己的狀態以達到目標,
此類決策與前面描述的條件-行動規則有根本的不同,原因是它考慮了未來——包括“如果我這樣做會發生什么?”和“這樣做會讓我高興嗎?”這樣的問題,基于目標用的做動作是是推理,而基于反射是基于規則進行行動的,
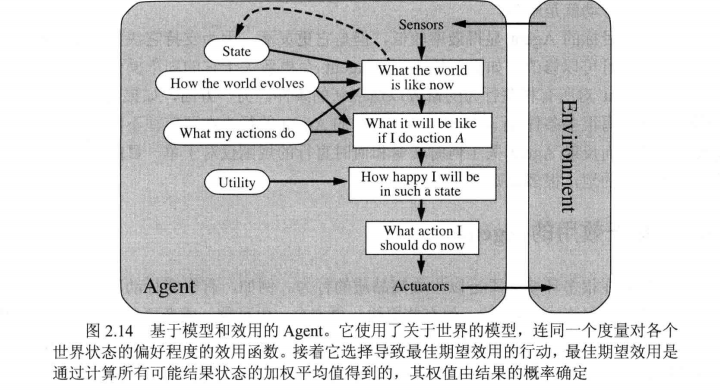
基于效用的Agent
這類Agent是對于基于目標Agent更加精細化的描述,如果說基于目標的Agent對于性能度量是二值的,那么基于效用的Agent對于目標的性能度量是從0到1的連續值,
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/261795.html
標籤:其他
上一篇:圖結構練習——最短路徑
下一篇:比例運算電路