ROS攝像頭引數標定
- 1. 緣由意義
- 2. 目的
- 3. 標定
- 3.1. 準備
- 3.2. 啟動攝像頭
- 3.3. 啟動標定程式
- 3.4. 開始標定
- 3.5. 資料保存
- 3.6. 糾正
1. 緣由意義
在影像測量程序以及機器視覺應用中
為確定空間物體表面某點的三維幾何位置與其在影像中對應點之間的相互關系,必須建立相機成像的幾何模型
這些幾何模型引數就是相機引數
無論是在影像測量或者機器視覺應用中,相機引數的標定都是非常關鍵的環節
其標定結果的精度及演算法的穩定性直接影響相機作業產生結果的準確性
因此,做好相機標定是做好后續作業的前提,提高標定精度是科研作業的重點所在
2. 目的
求出相機的內、外引數,以及畸變引數
3. 標定
3.1. 準備
以Ubuntu20環境為例,ROS版本為noetic
先使用以下命令安裝攝像頭標定功能包camera_calibration及其相關工具:
$ sudo apt install ros-noetic-usb-cam ros-noetic-camera-calibration ros-noetic-image-view ros-noetic-image-proc
硬體方面除了攝像頭,還需要如圖所示棋盤格圖案的標定靶
可以列印出來或在電腦螢屏顯示
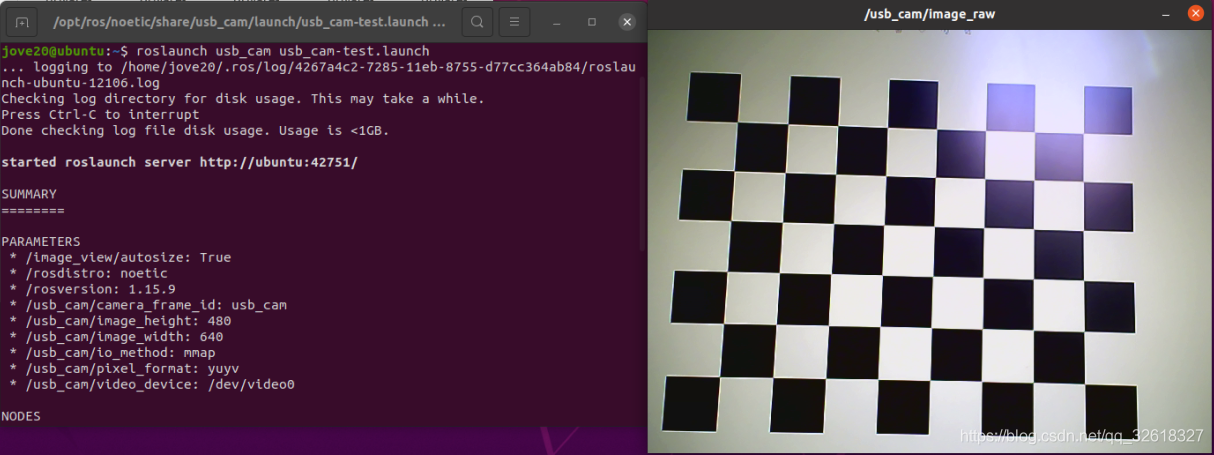
3.2. 啟動攝像頭
首先使用以下命令啟動usb攝像頭
roslaunch usb_cam uab-cam-test.launch
啟動時會出現警告
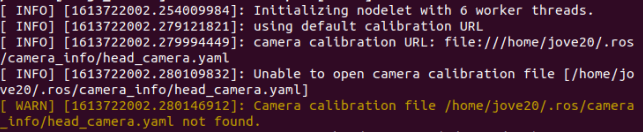
因為相機啟動時自動檢查矯正檔案,而現在還沒有
這個就是我們需要求的檔案,目前缺失沒關系
現在工具齊全,可以開始標定了
3.3. 啟動標定程式
新建視窗使用以下命令啟動標定程式,需要加載將被校準的影像主題:
rosrun camera_calibration cameracalibrator.py ––size 8x6 ––square 0.025 image:=/usb_cam/image_raw camera:=/usb_cam
Cameracalibrator.py 標定程式需要以下幾個輸入引數:
- Size:標定靶的內部角點個數,這里使用的棋盤格一共六行,每行有八個內部角點
- Square:這個引數對應每個棋盤格的邊長,單位是米(根據實際情況調整)
- Image和camera:設定攝像頭發布的影像話題
根據使用的攝像頭和標定靶尺寸相應修改以上引數,即可
3.4. 開始標定
在沒有標定成功前,右邊的按鈕都為灰色,不能點擊
將標定靶放在攝像頭視野內,應該可以看到以下圖形界面
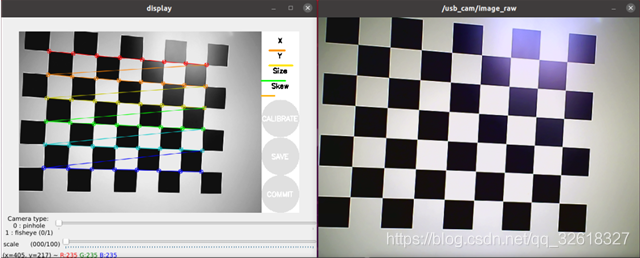
為了提高標定的準確性
應該盡量讓標定把出現在攝像頭視野范圍內的各個區域,界面右上角的進度潭訓提示標定進度
- X:標定靶在攝像頭視野中的左右移動
- Y:標定靶在攝像頭視野中的上下移動
- Size:標定靶在攝像頭視野中的前后移動
- Skew:標定靶在攝像頭視野中的傾斜轉動
不斷在視野中移動標定配,直到CALIBRATE按鈕變色,表示標定程式的引數采集完成
最好保證所有的進度條都是綠色滿格的
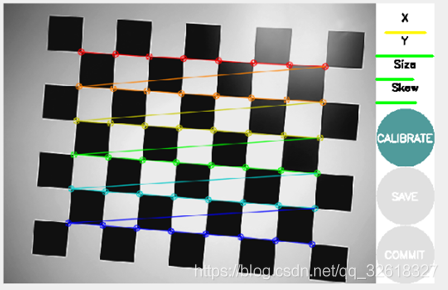
點擊CALBRATE按鈕
標定程式開始自動計算攝像頭的標定引數,并顯示:
**** Calibrating ****
mono pinhole calibration...
這個程序滿要等待段時間(幾分鐘), 界面可能會變成灰色無回應狀態,期間不要關閉
引數計算完成后界面回復,而且終端也會有標定結果的顯示
[image]
width
640
height
480
[narrow_stereo]
camera matrix
615.057435 0.000000 333.735616
0.000000 615.163616 263.417049
0.000000 0.000000 1.000000
distortion
0.261680 -0.651886 0.000347 -0.014690 0.000000
rectification
1.000000 0.000000 0.000000
0.000000 1.000000 0.000000
0.000000 0.000000 1.000000
projection
629.375916 0.000000 326.497955 0.000000
0.000000 634.527771 263.175221 0.000000
0.000000 0.000000 1.000000 0.000000
當前顯示的圖片為校準過后的
可以通過調整下方scale滑條調整
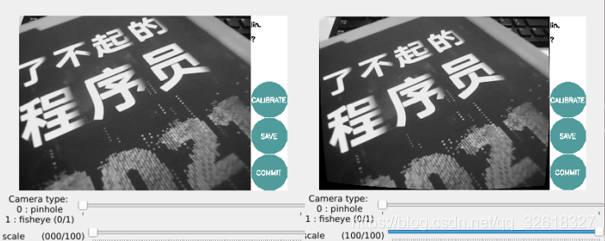
刻度為0.0意味著影像的大小,以便校正影像中的所有像素都是有效的
校正后的影像沒有邊框,但原始影像中的一些像素被丟棄
刻度為1.0意味著原始影像中的所有像素都是可見的
但是校正后的影像有黑色邊框,在原始影像中沒有輸入像素
3.5. 資料保存
點擊save按鈕,終端會列印生成檔案及路徑(計算機目錄/tmp下)

在計算機目錄打開/tmp檔案夾,可以看到calibrationdata.tar.gz
解壓檔案后從中找到ost.yaml檔案
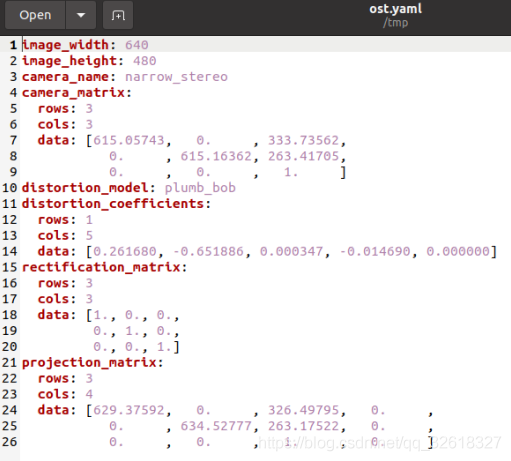
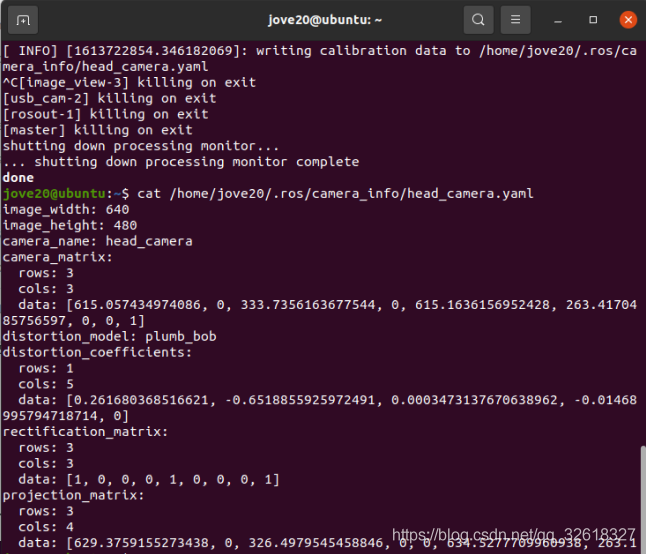
點擊commit按鈕,提交資料并退出程式
可以看到提示寫入檔案head_camera.yaml
writing calibration data to /home/jove20/.ros/camera_info/head_camera.yaml
也就是開始欠缺的,現在重新啟動攝像頭的話就無上述警告了
查看檔案內容也就是之前保存的ost.yaml檔案,只不過檔案里面的引數camera_name改為head_camera
3.6. 糾正
簡單地加載校準檔案并不能糾正影像
要進行更正,可以使用Image_proc包
攝像頭節點運行的情況下進行視覺處理:
$ ROS_NAMESPACE=usb_cam rosrun image_proc image_proc
下圖為嚴重畸變攝像頭拍攝:
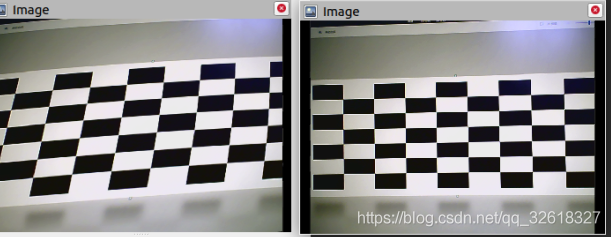
訂閱image_rect_color影像,很明顯的可以看到與原影像的對比
參考: camera_calibration
謝謝
 CSDN認證博客專家
機器人軟體
運動控制
深度學習
CSDN認證博客專家
機器人軟體
運動控制
深度學習
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/262558.html
標籤:其他
上一篇:【考研打卡】Week03——2020.02.15~2020.02.21
下一篇:CenOS7 運維 - DNS域名決議服務 | 正向決議 | 反向決議 | 主從服務器 | 排錯思路及方案 | 超詳細