
1、實驗介紹
光照傳感器用于檢測光照強度,其作業原理是將檢測光照強度值并將其轉化為電壓值,目前在智能家居,智慧城市,智慧農業,智慧工廠等物聯網領域被大量使用,
本實驗的主要結果是通過I2C總線控制光強度傳感器AP3216C對環境光強度及物體接近情況進行測量并獲取環境光強度及是否有物體靠近,然后通過OLED顯示屏將讀取到的光強度、接近程度、紅外資訊顯示在HaaS EDU K1的螢屏上,
HaaS EDU K1搭載了豐富實用的傳感器,開發者可以使用這些傳感器針對實際場景需求開發自己的應用,
2、涉及的知識點
- AP3216C光照與接近傳感器原理
- OLED繪圖
3、實驗準備
3.1、硬體
開發用電腦一臺
HaaS EDU K1開發板一個 (開發板內置AP3216C傳感器)
USB2TypeC 資料線一根
3.2、軟體
"光照資訊屏"功能已經包含在edu_demo應用中,并且包含在發布版本中,
3.2.1、韌體版本
韌體版本:V1.0.0
3.2.2、代碼路徑
git clone https://gitee.com/alios-things/AliOS-Things.git -b dev_3.1.0_haas3.2.3、編譯
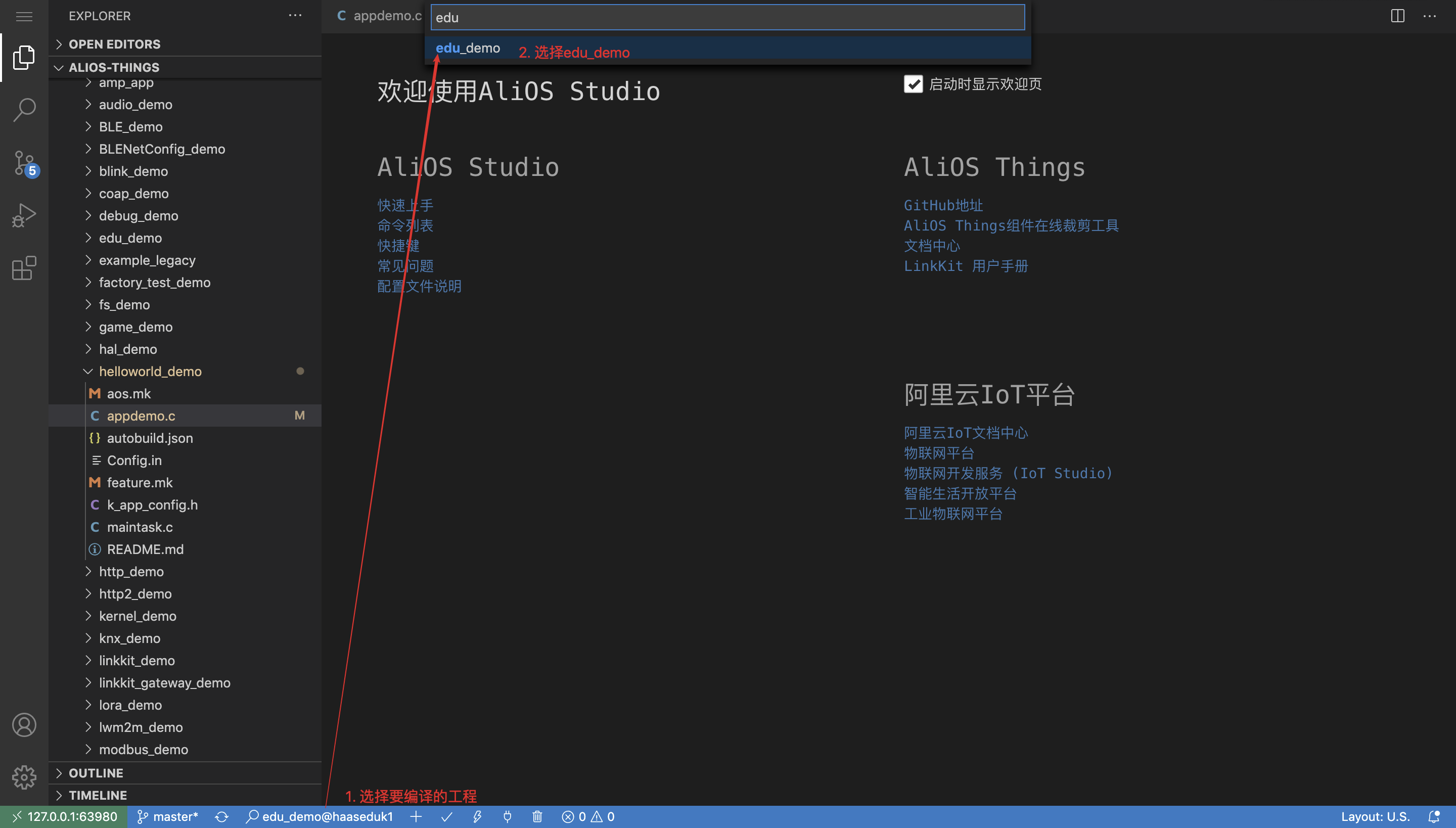
進入代碼的頂層目錄如AliOS-Things進行編譯,直接編譯application/example/目錄下的edu_demo應用,
兩種方法進行編譯
命令列方式
aos make distclean
aos make edu_demo@haaseduk1 -c config
aos makeAliOS Studio IDE方式
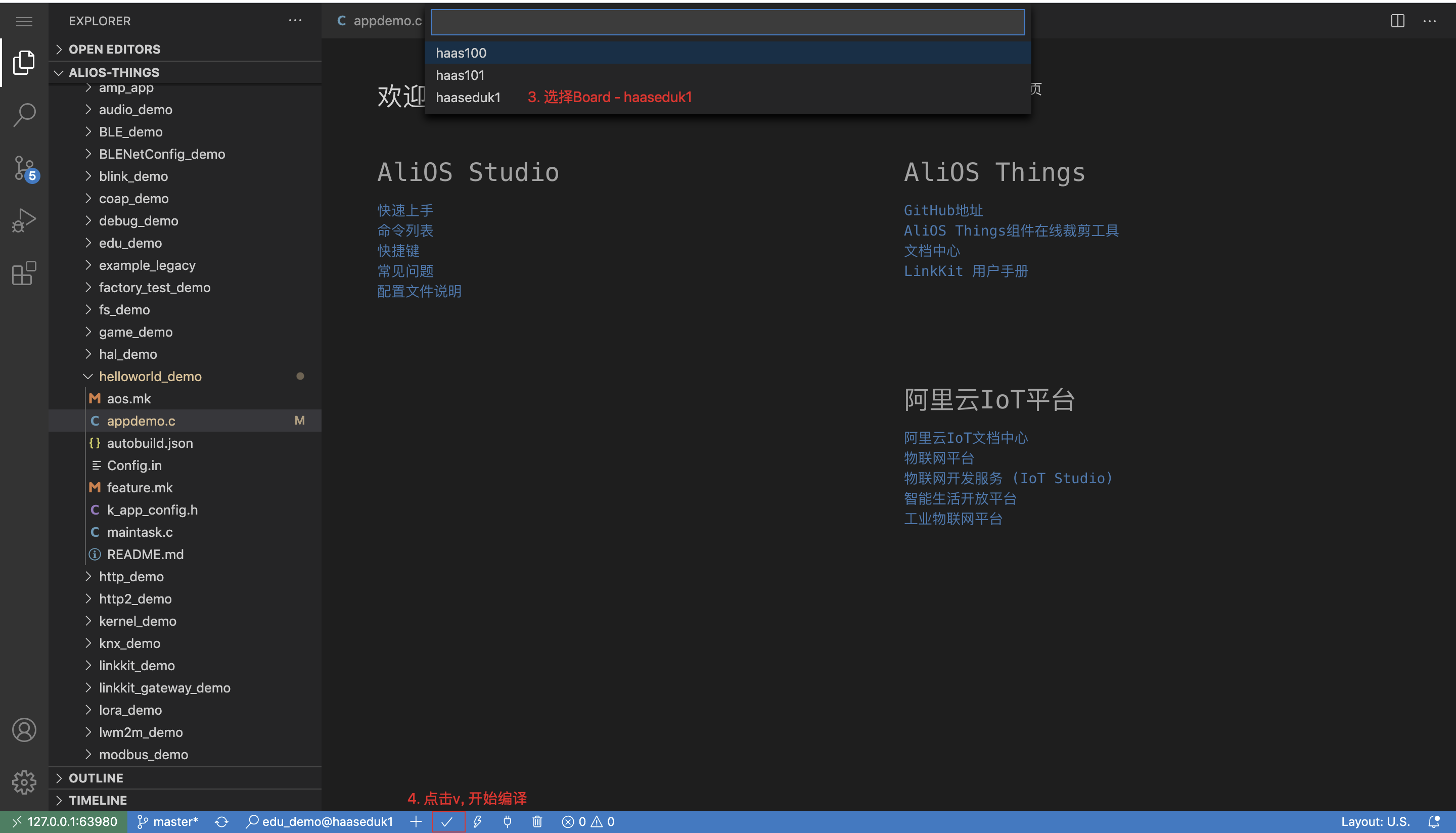
3.2.4、燒錄
見開發環境章節
3.3、上手把玩
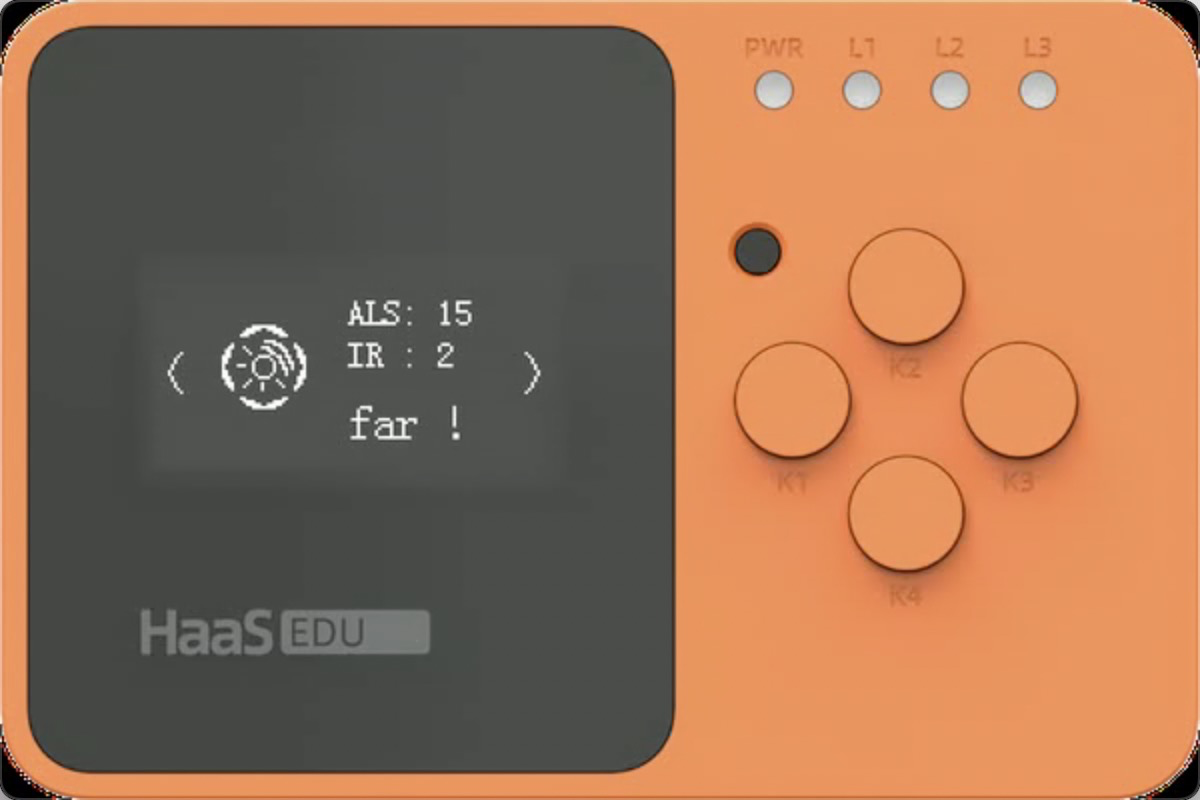
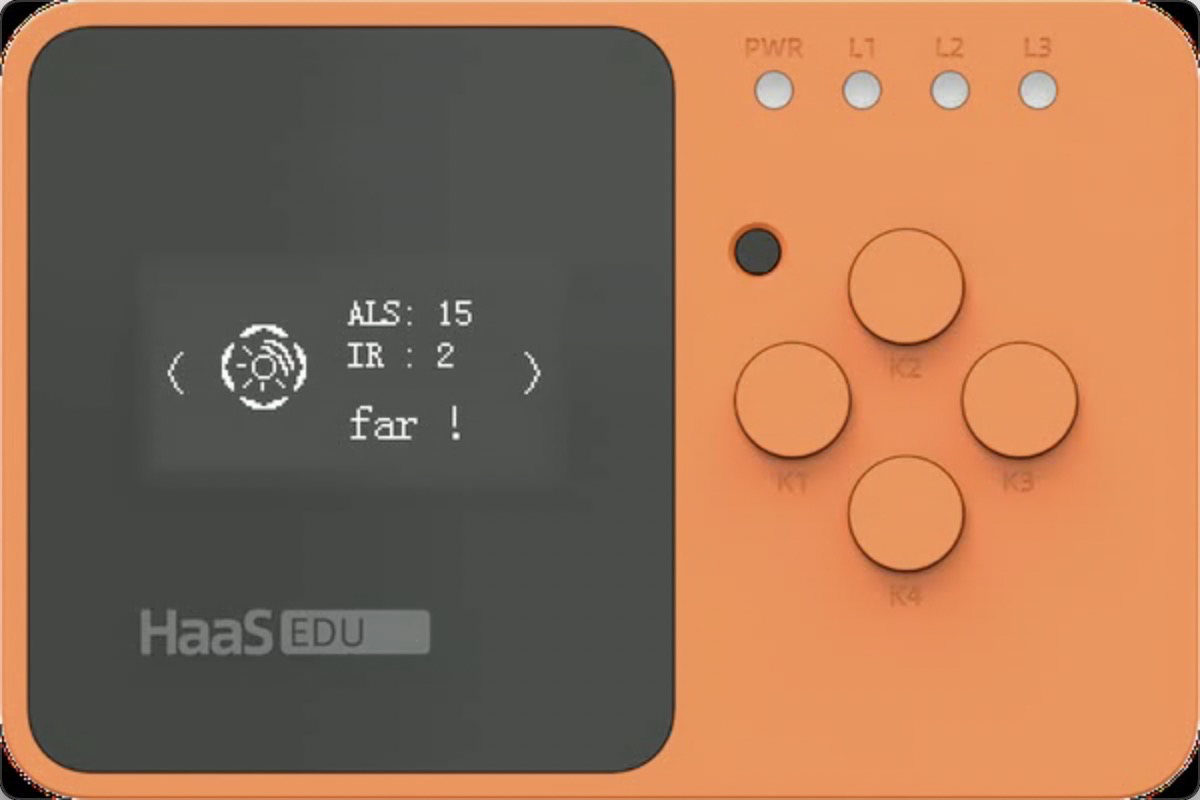
實驗運行結果如下:
室內自然燈光下
用手機閃光燈照射螢屏上方的透明孔位

螢屏前沒有遮擋情況下
拿物體靠近螢屏上方的透明孔位

3.4、實際應用場景(產品)介紹
目前光強度傳感器及接近傳感器在以下日常生活、工業生產等環境中都有非常廣泛的應用,
- 家庭智能燈系統
檢測到光強度低于一定亮度之后,觸發信號控制客廳自動開燈
檢測到光強度低于一定亮度之后,有人體靠近則自動打開夜燈/燈帶
- 智能路燈
智慧路燈安裝光強度傳感器后可以自動的感知環境強度,從而做到智能開關,保證交通安全的同時節省了系統能源
- 智能手機/平板/電視等
智能手機、平板、電視等消費類電子需要感知環境光溫度并根據環境光溫度自動調節螢屏亮度,給使用者最佳的視覺體驗的同時也降低了系統的功耗
智能手機上都存在的距離傳感器還可以在通話程序中檢測到聽筒靠近頭部的時候自動熄滅螢屏,防止誤觸碰
智能手機還會用距離傳感器與其它感應器實作反轉手機靜音及解鎖/鎖屏等操作
這些是我們日常生活中最常見的幾個應用場景,
光強度傳感器是一種光電傳感器,光電傳感器擁有更廣泛的應用范圍,比如煙霧報警系統、工廠煙塵檢測系統、條形碼掃描儀、產品計數器、轉速檢測系統等等,
4、硬體介紹
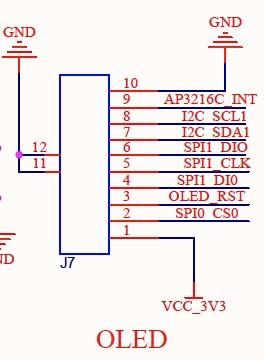
4.1、電路原理圖
AP3216芯片位于螢屏上方,是通過OLED擴展介面和HaaS EDU K1主板連接,最終連接到HaaS1000的I2C1通道,
4.2、AP3216C傳感器介紹
AP3216C外觀如下圖

4.2.1、AP3216C芯片特性
- 7-bit地址模式,地址:0x1E
- 支持I2C介面Fast Mode (400kbps)
- 支持多種連續測量/單次測量及光強度、接近指標單獨測驗及組合測驗
- 內置溫度補償電路
- 作業溫度范圍:-30°C到+80°C
- 光強度傳感器
16-bit有效線性輸出
4種動態可選范圍
- 接近傳感器
10-bit有效線性輸出
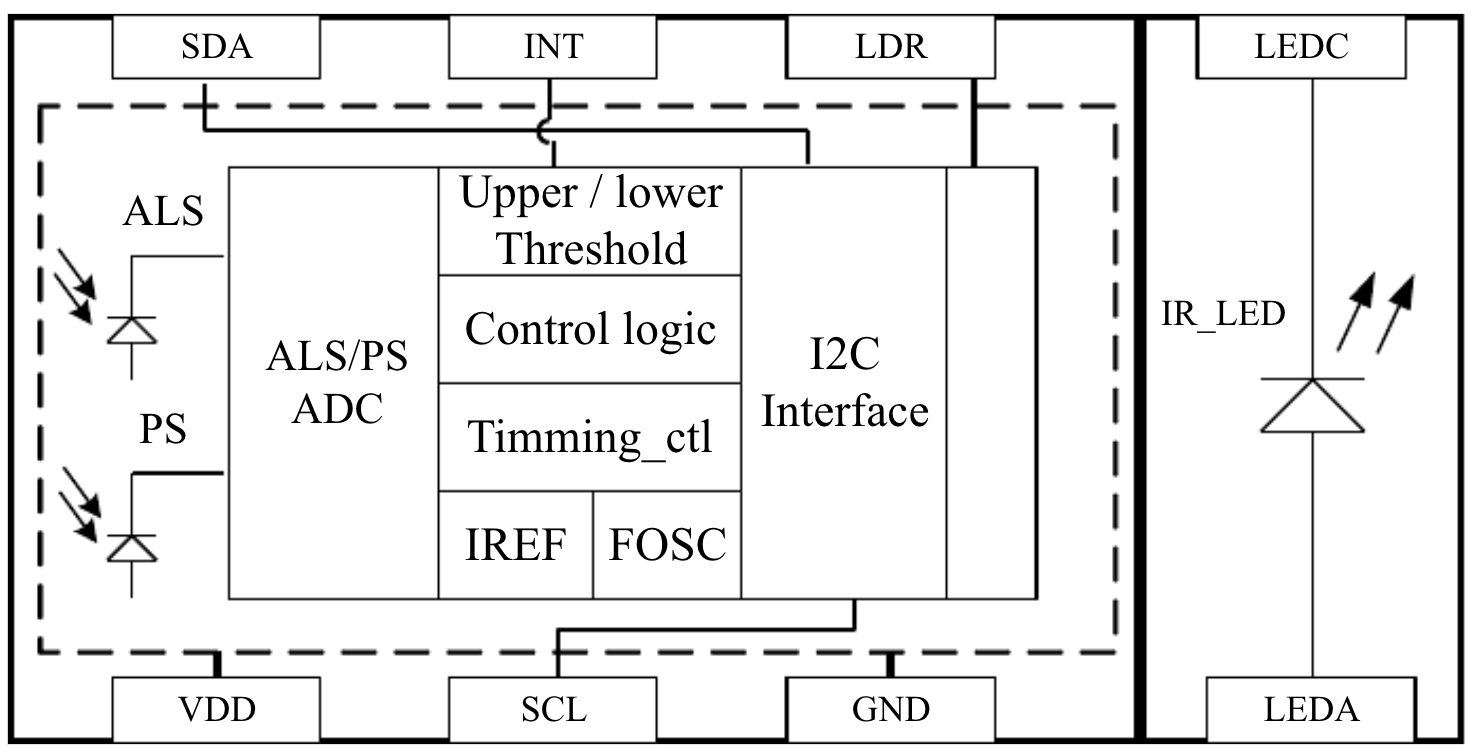
4.2.2、AP3216C內部框圖
AP3216C主要包含如下幾部分,
- 光亮度敏感元件
- 接近度敏感元件
- ADC數模轉換模塊
- 內部邏輯控制電路(包含條件觸發中斷功能)
- I2C總線控制器
- 紅外LED發射二極管
4.2.3、AP3216C作業模式
根據AP3216C的datasheet說明,在正常作業時,它共有3種作業模式:
- ALS模式
在這種模式下,AP3216C只對光強度進行量測 - PS+IR模式
在這種模式下,AP3216C只對接近程度進行量測 - ALS+PS+IR模式
在這種模式下,AP3216C會同時對光強度及接近程度進行量測
三種模式均支持單次量測也支持回圈量測,其量測穩定時間如下:

4.2.4、AP3216C中斷模式
AP3216C提供中斷檢測功能,MCU可以設定ALS及PS中斷觸發門限及持續時間閾值,在環境亮度及接近程度到達門限值后持續時間超出持續時間閾值之后,會向INT管腳發送中斷通知MCU進行處理,
本案例中未使用中斷模式,
4.2.5、AP3216C作業流程
AP3216C的典型作業流程如下:
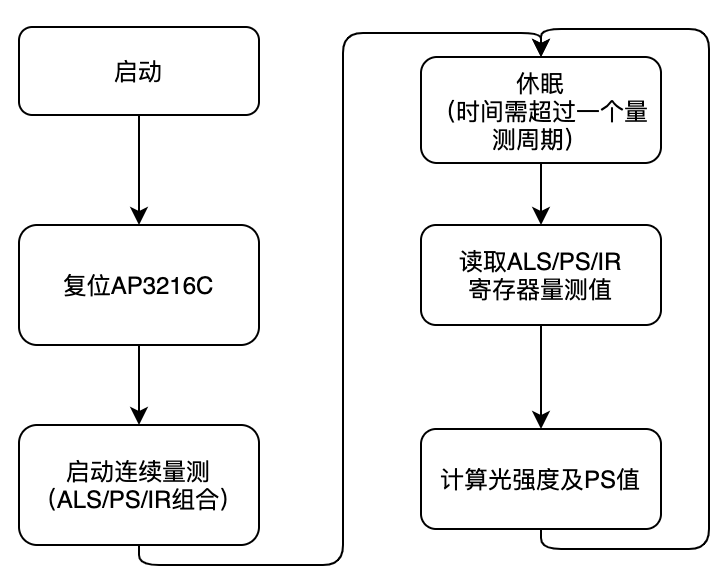
對AP3226C進行復位之后,設定作業模式(連續/單次測量,ALS/PS/IR組合設定),之后等待硬體測量穩定時間,再發起讀取測量值的程序,
其中,復位及模式設定是對AP3216C的System Configuration暫存器進行操作,datasheet中對System Configuration暫存器定義及描述如下:
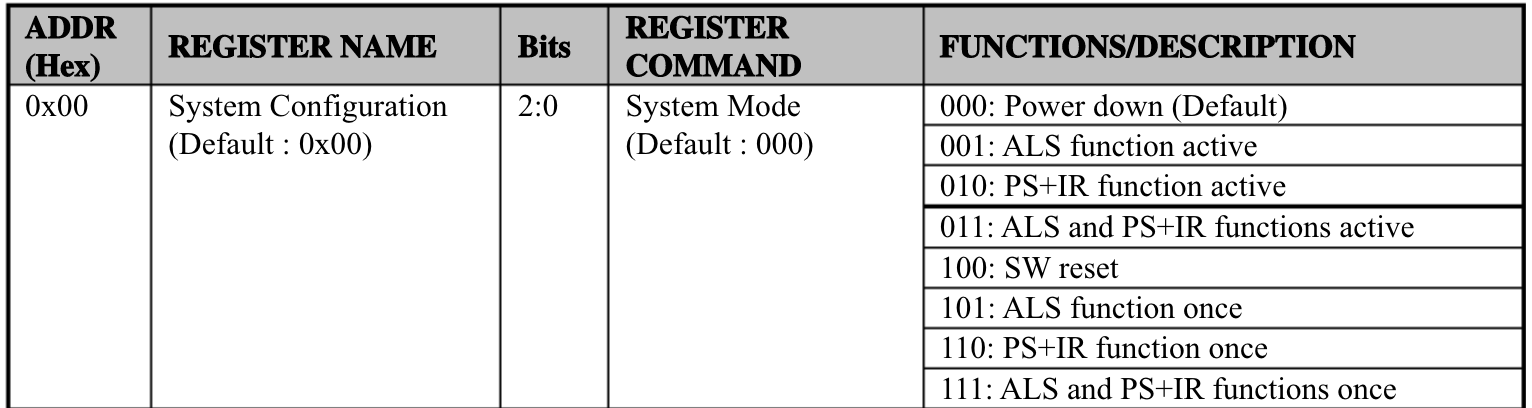
- 復位操作
參考datasheet的描述,是通過I2C 向地址為0x00的暫存器寫入0x4 (對應二進制的100),
- 模式設定
ALS only連續測量模式:是通過I2C 向地址為0x00的暫存器寫入0x4 (對應二進制的100),
PS/IR only連續測量模式:是通過I2C 向地址為0x00的暫存器寫入0x1 (對應二進制的001),
ALS+PS/IR連續測量模式:是通過I2C 向地址為0x00的暫存器寫入0x2 (對應二進制的010),
ALS only單次測量模式:是通過I2C 向地址為0x00的暫存器寫入0x5 (對應二進制的101),
PS/IR only單次測量模式:是通過I2C 向地址為0x00的暫存器寫入0x6 (對應二進制的110),
ALS+PS/IR單次測量模式:是通過I2C 向地址為0x00的暫存器寫入0x7 (對應二進制的111),
- 讀取測量結果
ALS、PS、IR值可以通過如下暫存器的值來獲取,暫存器地址及所讀取數值詳細決議方法請參考下表: 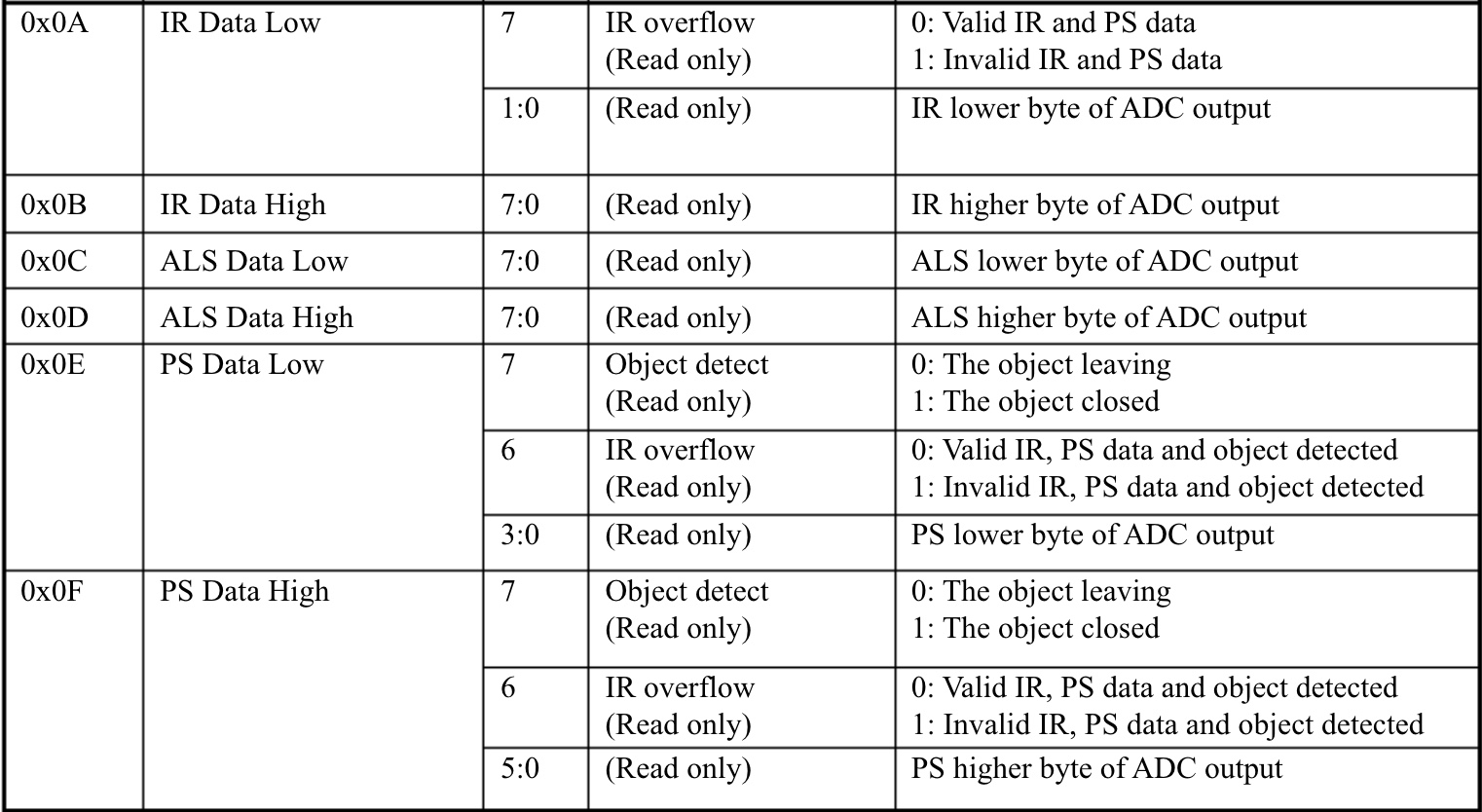
4.2.6、ALS光強度決議
通過讀取ALS資料暫存器(0x0C和0x0D)得到16bit的ADC count資料之后,需要根據ALS Configuration暫存器的ALS Gain欄位將ADC count資料根據芯片手冊的說明轉換成以lux為單位的亮度值,如下圖所示: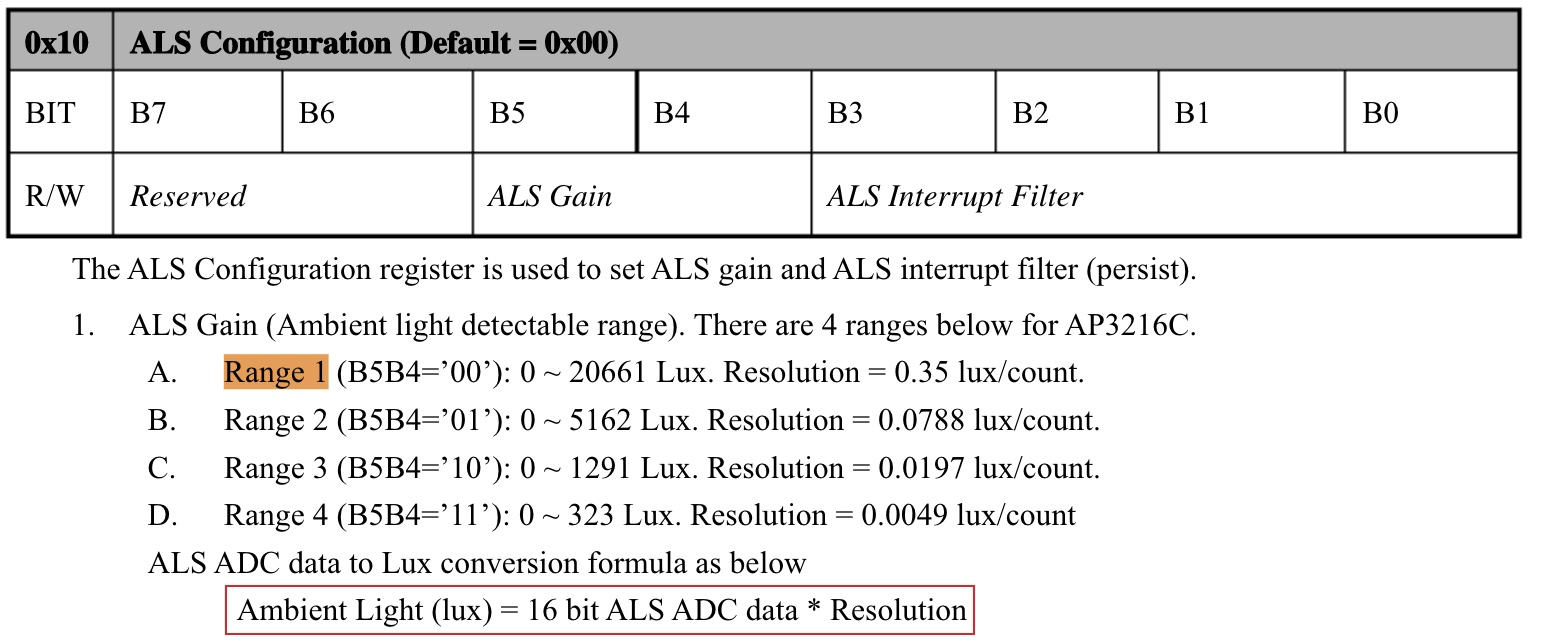
4.2.7、PS/IR資料決議
PS Data暫存器詳細定義如下:
PS 有效位數為10bit,
OBJ bit在有物體靠近的時候被設定成1,否則設定為0,
IR_OF bit被設定成1代表PS值無效(高強度紅外光的情況下會出現)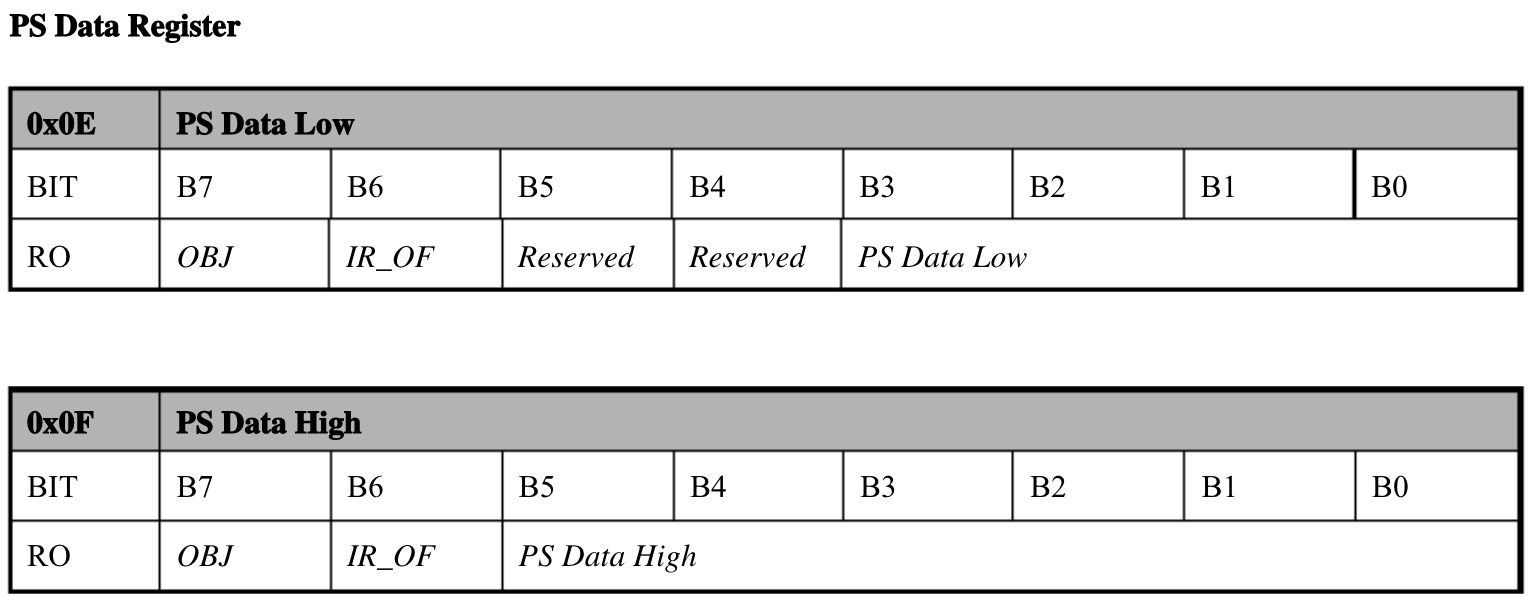
IR資料有效位數同樣為10bit,也有一個IR_OF來標識IR/PS資料是否有效,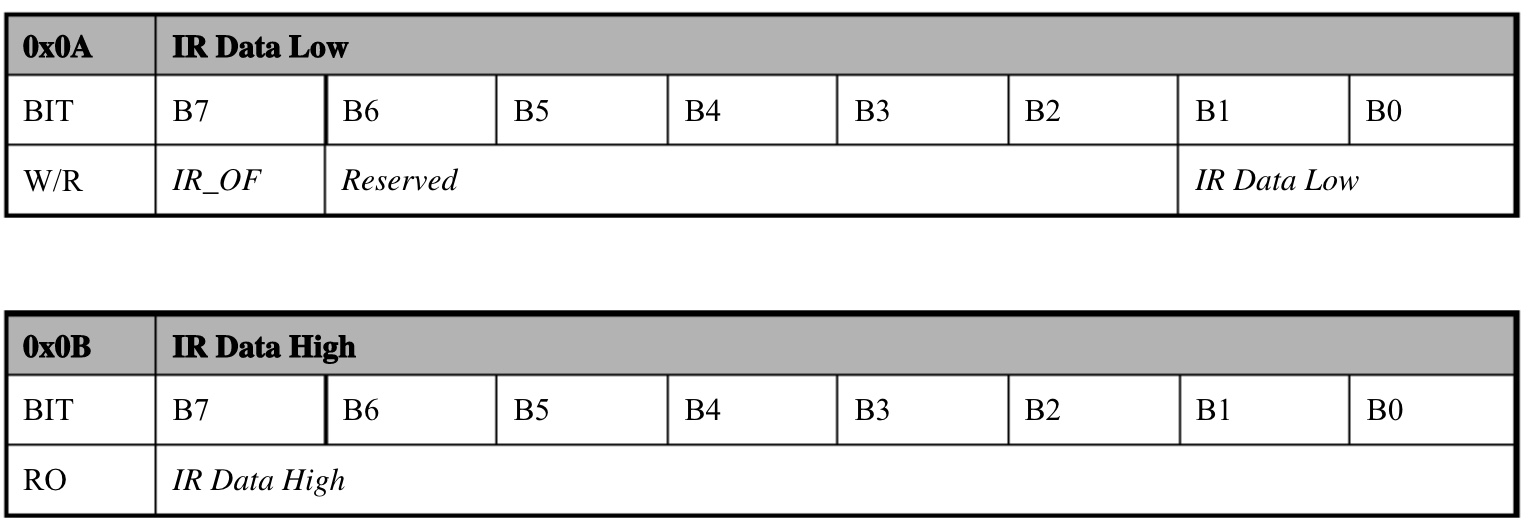
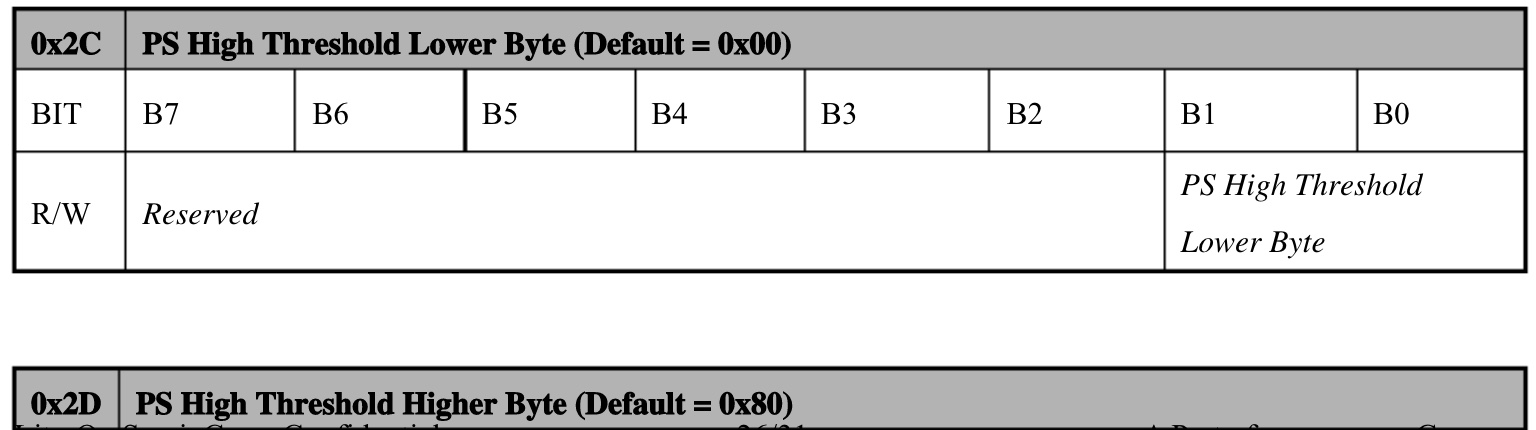
AP3216C判斷物體靠近和遠離的動作是通過兩組PS 高低閾值暫存器和PS Data暫存器進行比對,PS Data高于PS High Threshold之后,則判定為物體遠離;PS Data低于PS Low Threshold之后,則視為物體靠近,
PS Low Threshold計算方法:Value(Reg_0x2B) * 4 + Value(Reg_0x2A)
PS High Threshold計算方法:Value(Reg_0x2D) * 4 + Value(Reg_0x2C)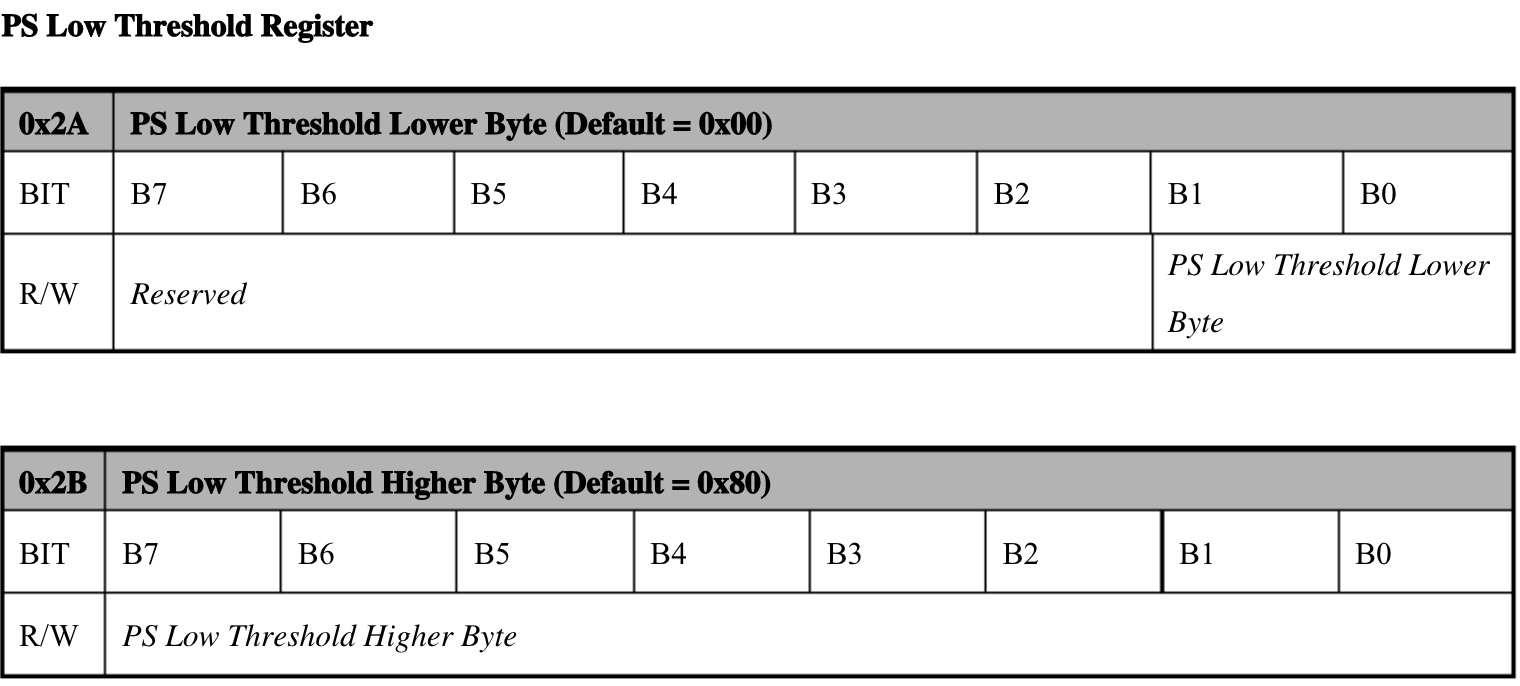

4.2.8、PS中斷模式說明
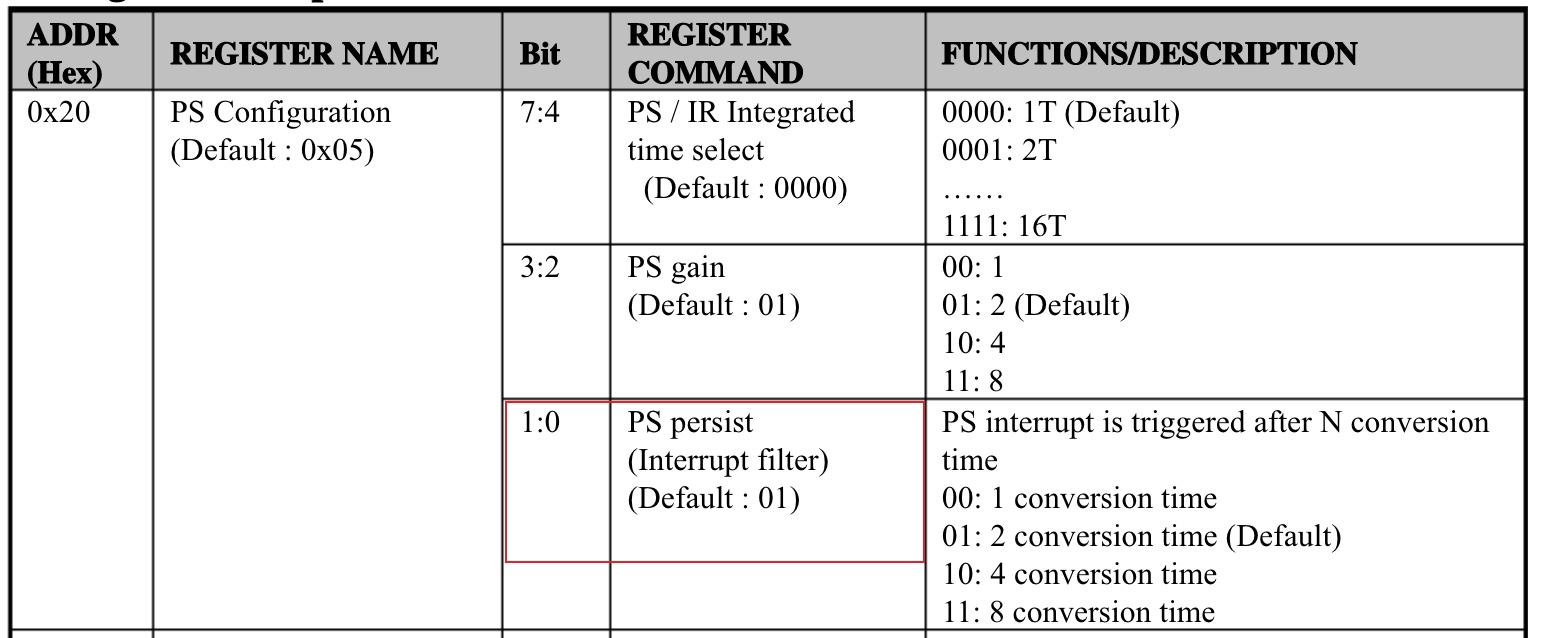
在開啟了AP3216C的中斷模式,為了避免靠近物體抖動帶來頻繁觸發中斷的情況,在PS Data高于PS High Threashold或低于PS Low Threshold之后,需要等待一個PS persist時間,如果PS persist時間之內,PS Data狀態沒有發生變化,則觸發中斷,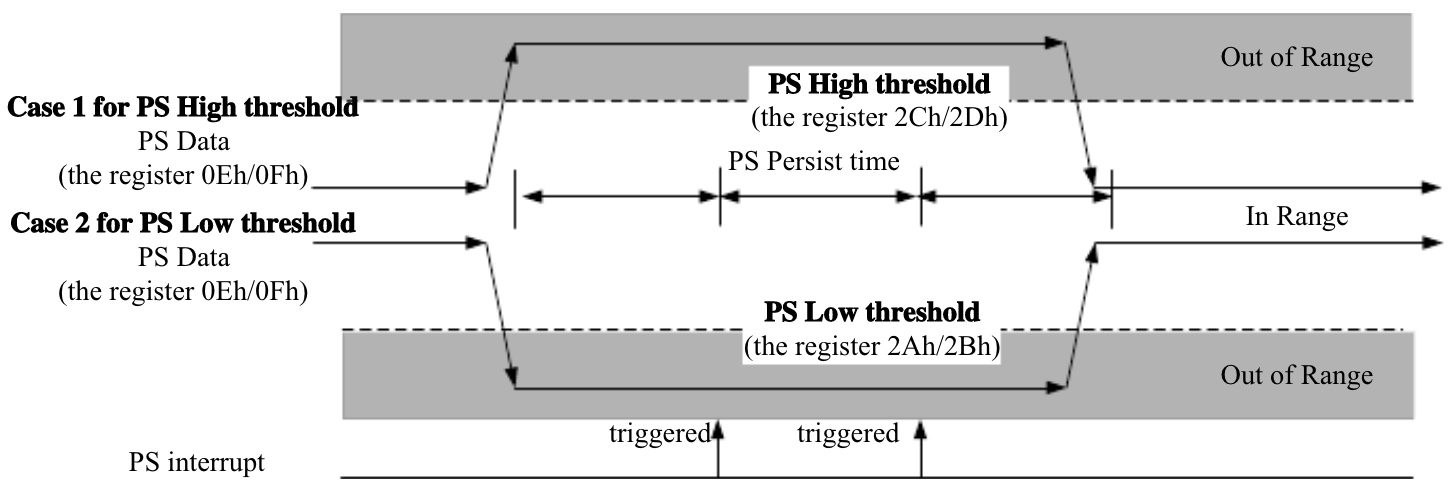
PS Persist的時間可以通過配置PS Configuration暫存器的bit 0:1,
4.3、OLED顯示屏介紹
OLED在電場的作用下,陽極產生的空穴和陰極產生的電子就會發生移動,分別向空穴傳輸層和電子傳輸層注入,遷移到發光層,當二者在發 光層相遇時,產生能量激子,從而激發發光分子最終產生可見光,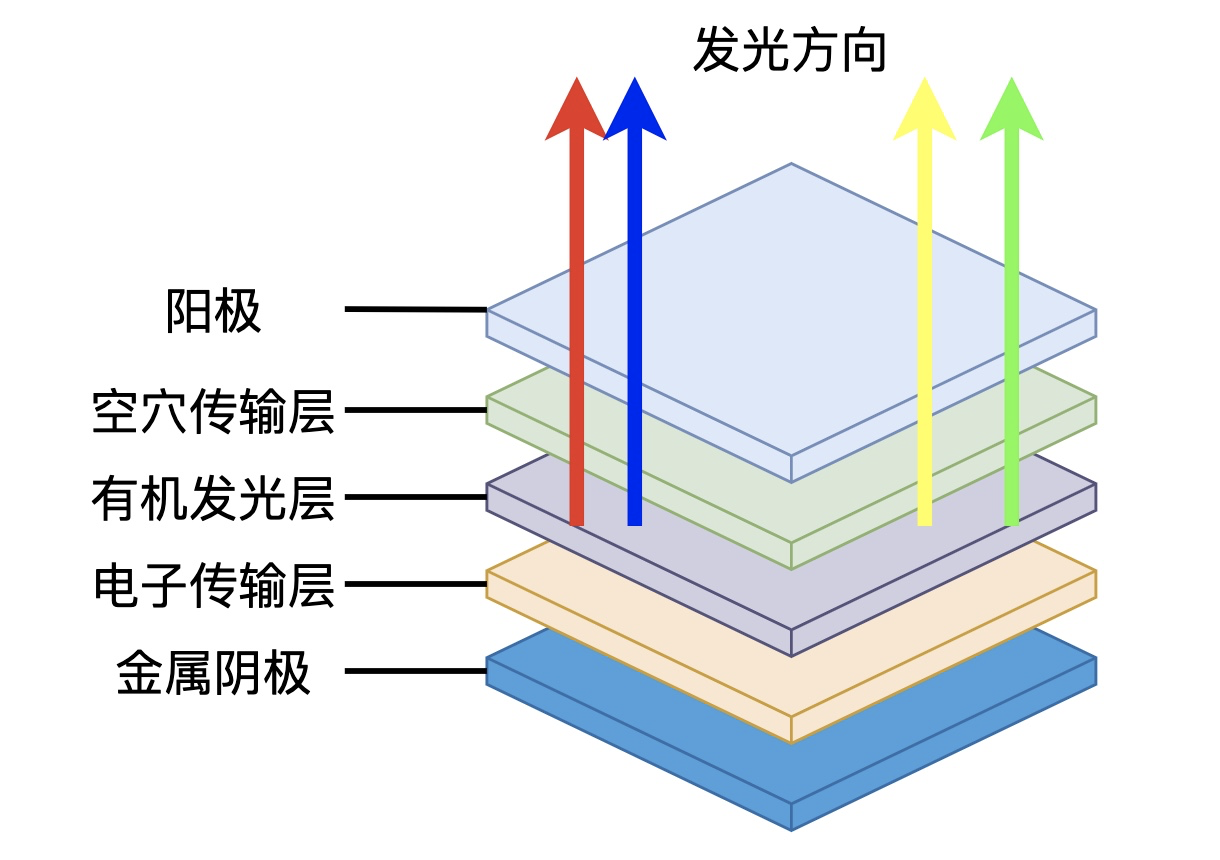
OLED驅動芯片的詳細說明請參考“OLED”章節中的描述,
4.4、I2C總線技術
HaaS EDU K1上AP3216C和HaaS1000通過I2C1介面進行通信,
I2C總線是飛利浦公司在80年代為了讓CPU可以連接低速周邊設備而設計的,外接傳感器是I2C總線最典型的應用場景,目前I2C Spec已經發展到了6.0版本,可以通過https://www.nxp.com.cn/docs/en/user-guide/UM10204.pdf進行下載
I2C采用多主從結構,I2C主設備基于地址對I2C從設備進行尋址,采用8-bit資料傳輸模式,支持7-bit/10-bit地址模式,I2C總線對I2C傳輸開始/結束/資料傳輸/ACK機制/時鐘同步/沖突仲裁等進行了詳細的定義,這里就不再贅述,
5、軟體介紹
HaaS EDU K1的edk_demo 應用程式中包含多個應用案例,所有的案例軟體設計都遵循HaaS EDK應用架構的設計思想,其設計思想可以參考“HaaS EDK主系統框架”中的“添加新應用”小節的說明,
簡單來說,所有的子應用頁面都需要實作MENU_TYP結構體,
光照資訊屏應用代碼位于:appliciation/example/edu_demo/k1_apps/light_meter/light_meter.c中,
MENU_TYP lightmeter = {
"lightmeter",
&lightmeter_cover,
&lightmeter_tasks,
NULL,
&lightmeter_child_list};
在HaaS EDU K1上電之后,按K1或K2鍵左右切換應用的時候,如果切換到光照資訊屏頁面再到退出該頁面的程序中,lightmeter下面的API會依此被呼叫:
- lightmeter_init
- lightmeter_uninit
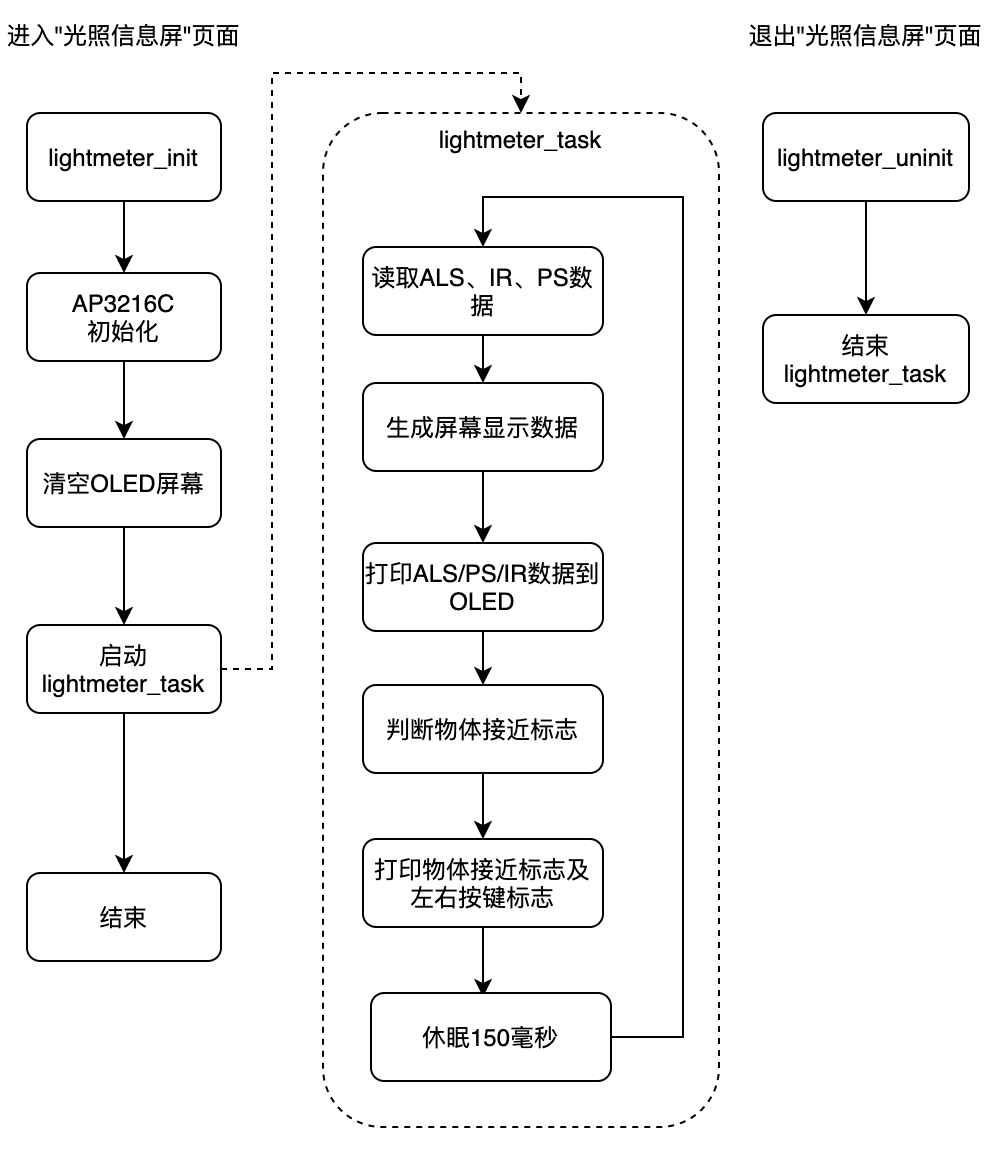
5.1、軟體流程
軟體流程圖如下所示,
在進入光照資訊屏頁面后,啟動名為lightmeter_task的task,周期性的讀取ALS/PS/IR資料并判斷物體靠近標志之后將相關資料按照一定的規則列印到OLED螢屏上,
5.2、代碼實作
5.2.1、光照資訊屏頁面
代碼位置:appliciation/example/edu_demo/k1_apps/light_meter/light_meter.c
詳細代碼及注釋如下:
#include <stdio.h>
#include <stdlib.h>
#include "lightmeter.h"
#include "aos/kernel.h"
#include "ap3216c.h"
/* 按照主程式框架的規則,宣告頁面相關相關資訊(封面、初始化、反初始化、子頁面等)*/
MENU_COVER_TYP lightmeter_cover = {MENU_COVER_NONE};
MENU_TASK_TYP lightmeter_tasks = {
lightmeter_init,
lightmeter_uninit};
MENU_LIST_TYP lightmeter_child_list = {NULL, 0};
MENU_TYP lightmeter = {
"lightmeter",
&lightmeter_cover,
&lightmeter_tasks,
NULL,
&lightmeter_child_list};
/* 頁面初始化函式 */
int lightmeter_init(void)
{
printf("lightmeter_init begin\n");
/* AP3216C 初始化函式 */
ap3216c_init();
printf("lightmeter_init done\n");
/* 清空OLED螢屏 */
OLED_Clear();
OLED_Refresh_GRAM();
/* 啟動光照資訊屏主任務 */
aos_task_new("lightmeter_task", lightmeter_task, NULL, 1000);
printf("aos_task_new lightmeter_task \n");
return 0;
}
void lightmeter_task(void)
{
uint16_t tmp[3];
uint8_t als[20];
uint8_t ps[20];
uint8_t ir[20];
while (1)
{
/* 從AP3216C讀取ALS、PS、IR資料 */
tmp[0] = ap3216c_read_ambient_light();
tmp[1] = ap3216c_read_ir_data();
tmp[2] = ap3216c_read_ps_data();
/* 列印ALS/IR資訊字串 */
sprintf(als, "ALS: %d", tmp[0]);
sprintf(ir, "IR : %d", tmp[1]);
/* 將lightmeter圖示及ALS/IR信息輸出到螢屏 */
OLED_Clear();
OLED_Icon_Draw(20, 14, &icon_lighter_32_32, 0);
OLED_Show_String(64, 6, als, 12, 1);
OLED_Show_String(64, 20, ir, 12, 1);
/* 判斷是否有物體靠近,并顯示在螢屏上 */
if ((tmp[2] >> 15) & 1)
OLED_Show_String(64, 36, "near !", 16, 1);
else
OLED_Show_String(64, 40, "far !", 16, 1);
/* 將左右按鍵標志輸出到螢屏上 */
OLED_Icon_Draw(2, 24, &icon_skip_left, 0);
OLED_Icon_Draw(122, 24, &icon_skip_right, 0);
/* 重繪螢屏資料 */
OLED_Refresh_GRAM();
/* 休眠150ms */
aos_msleep(150);
}
}
/* 光照資訊屏頁面退出處理函式 */
int lightmeter_uninit(void)
{
/* 洗掉光照資訊屏主任務 */
aos_task_delete("lightmeter_task");
printf("aos_task_delete lightmeter_task \n");
return 0;
}
5.2.2、AP3216C驅動
代碼位置:components/peripherals/sensor/drv/drv_als_ps_ir_liteon_ap3216c.c
以ap3216C初始化和讀取ALS數值為例,詳細代碼及注釋如下:
/**
* This function initializes ap3216c registered device driver
*
* @param no
*
* @return the ap3216c device.
*/
void ap3216c_init(void)
{
/**
1. ap3216c連接到HaaS edu k1的I2C1埠, 所以i2c_dev的埠好需要設定為1
2. ap3216c為7-bit地址模式
3. haas1000芯片內部的I2C1作為主模式, ap3216c作為從設備
4. ap3216c外設定制用AP3216C_ADDR宣告
*/
#if 1
i2c_dev.port = 1;
i2c_dev.config.address_width = I2C_HAL_ADDRESS_WIDTH_7BIT;
i2c_dev.config.freq = I2C_BUS_BIT_RATES_100K;
i2c_dev.config.mode = I2C_MODE_MASTER;
i2c_dev.config.dev_addr = AP3216C_ADDR;
/* 呼叫hal_i2c_init對haas1000內部的I2C1控制器進行初始化 */
hal_i2c_init(&i2c_dev);
#endif
/* 復位ap3216c芯片, 向system configuration暫存器寫入0x0對其進行軟體復位 */
reset_sensor();
/* 等待ap3216c復位穩定時間 */
aos_msleep(100);
/* 設定ap3216c作業在連續量測ALS/PS/IR模式 */
ap3216c_set_param(AP3216C_SYSTEM_MODE, AP3216C_MODE_ALS_AND_PS);
/* 休眠150ms等待量測到穩定值 */
aos_msleep(150); // delay at least 150ms
/* 配置中斷腳 和 中斷資料 - 函式內部實作置空 */
ap3216c_int_Config();
ap3216c_int_init();
}
/**
* This function reads light by ap3216c sensor measurement
*
* @param no
*
* @return the ambient light converted to float data.
*/
uint16_t ap3216c_read_ambient_light(void)
{
uint16_t brightness = 0; // default error data
uint16_t read_data;
uint8_t range;
/*分別讀取 0x0c和0x0d的值,組成16-bit的ALS ADC count */
read_data = (uint16_t )read_low_and_high(AP3216C_ALS_DATA_L_REG, 1);
/* 讀取ALS range 配置 */
ap3216c_get_param(AP3216C_ALS_RANGE, &range);
/* 根據ALS range 配置,完成從ADC count到lux的換算 */
if (range == AP3216C_ALS_RANGE_20661)
{
brightness = 0.36 * read_data; //sensor ambient light converse to reality
}
else if (range == AP3216C_ALS_RANGE_5162)
{
brightness = 0.089 * read_data; //sensor ambient light converse to reality
}
else if (range == AP3216C_ALS_RANGE_1291)
{
brightness = 0.022 * read_data; //sensor ambient light converse to reality
}
else if (range == AP3216C_ALS_RANGE_323)
{
brightness = 0.0056 * read_data; //sensor ambient light converse to reality
}
return brightness;
}
/**
* This function is convenient to getting data except including high and low data for this sensor.
* note:after reading lower register first,reading higher add one.
*/
/* 讀取從reg開始的兩個位元組, 并對資料進行合并*/
static uint32_t read_low_and_high(uint8_t reg, uint8_t len)
{
uint32_t data;
uint8_t buf = 0;
read_regs( reg, len, &buf); // 讀低位元組
data = buf;
read_regs( reg + 1, len, &buf); // 讀高位元組
data = data + (buf << len * 8); // 合并資料
return data;
}
/* 讀暫存器的值 */
static void read_regs(uint8_t reg, uint8_t len, uint8_t *buf)
{
hal_i2c_mem_read(&i2c_dev, i2c_dev.config.dev_addr, reg, 1, buf, len, 100);
}
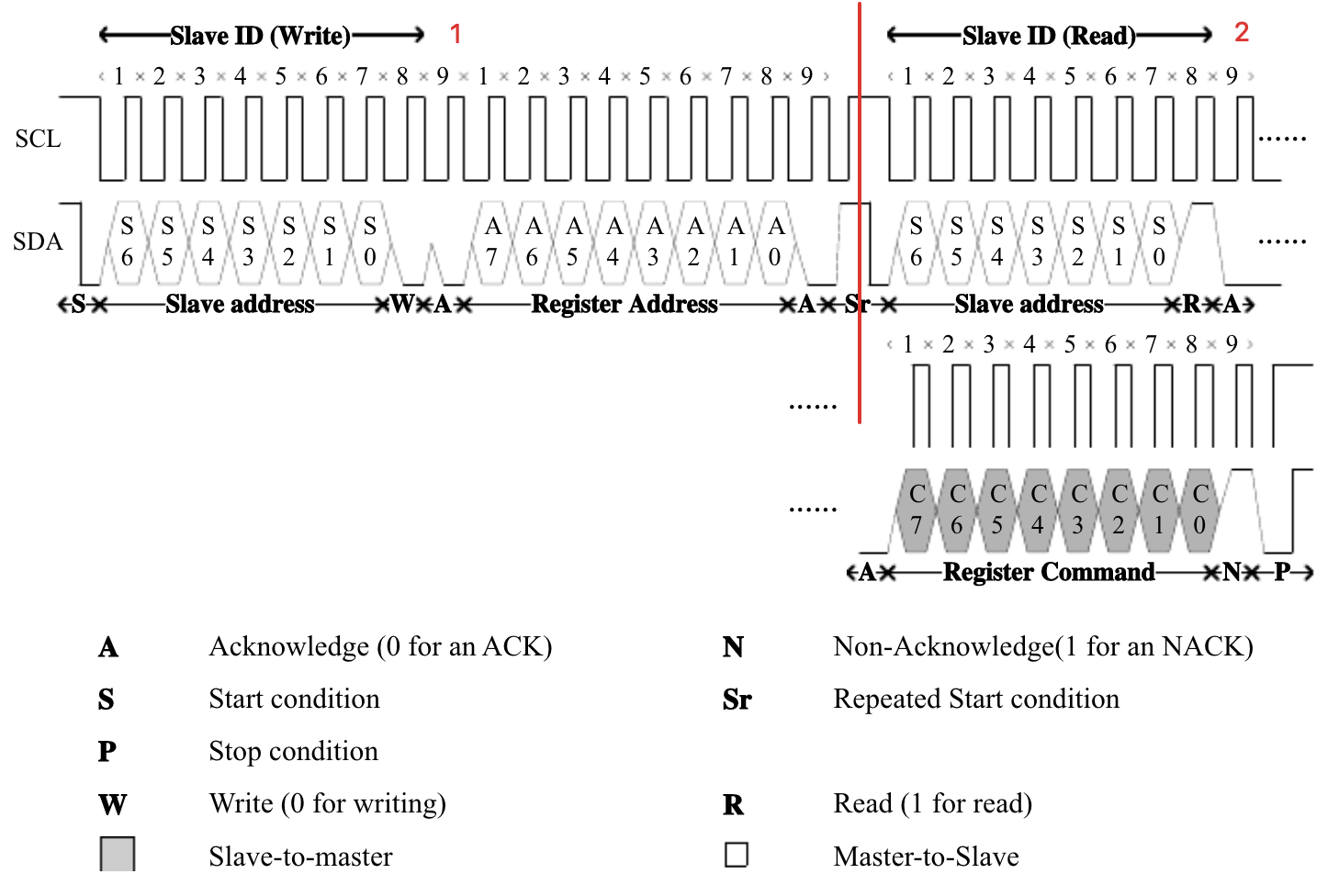
這里的hal_i2c_mem_read的實作和AP3216C datasheet上面讀取暫存器的描述相匹配,
- MCU I2C 主設備先將暫存器地址通過I2C寫操作發給AP3216C從設備
- MCUI2C 主設備發起讀操作從AP3216C從設備讀取暫存器的值
AP3216C暫存器讀取的整個I2C傳輸程序中,詳細資料傳輸程序如下圖所示:
???????
讀取AP3216C的PS和IR暫存器的程序和讀取ALS的程序中I2C的傳輸程序完全一致,這里就不再贅述,
???????
6、開發者技術支持
如需更多技術支持,可加入釘釘開發者群,或者關注微信公眾號

更多技術與解決方案介紹,請訪問阿里云AIoT首頁https://iot.aliyun.com/
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/264215.html
標籤:其他