PID控制的理解與具體實作
摘要
比例積分微分控制,簡稱PID控制,由于其 演算法簡單、***魯棒性好***和 可靠性高,被廣泛應用于工業程序控制,至今仍有 90% 左右的控制回路具有PID結構,
簡單的說,根據給定值和實際輸出值構成控制偏差,將偏差按比例、積分和微分通過線性組合構成控制量,對被控物件進行控制,
所謂串級控制,就是采用兩個控制器串聯作業,外環控制器的輸出作為內環控制器的設定值,由內環控制器的輸出去操縱控制閥,從而對外環被控量具有更好的控制效果,
萬能的PID控制聽起來很陌生,但是在我們的生活中隨處可見,比如空調的溫度控制,無人機的精準懸停,機械手臂的運動系統,人臉跟蹤,甚至飛機和火箭的姿態調整等等,都要到這這個最基礎的自動控制演算法,
一定要認真理解PID控制演算法是一種倍訓系統!!!
一、概念理解與數學原理
首先我們先不引入過多的復雜概念,先結合一個具體的生活實體來形象生動的講述PID的各個環節,
眾所周知,某校西區宿舍洗澡是要調控冷熱水比例才能達到令人舒服的水溫,我有個師兄,現在這位師兄已經放出了冷水,只需要再加入50個單位的熱水就可以肆無忌憚的洗澡了,一般地,我們會先設定一個達成目標的時間,比如說5秒,那么這位師兄操縱機械臂旋轉熱水閥的平均速度是10單位/秒,按照這個速度勻速轉動開關5s就可以完成目標了,而這種控制方法叫做***開放回路控制系統***,模式圖如下:

這種控制系統的可以理解成是一種流水線的結構,輸入是恒定的值,輸出也是對應得到的恒定值,且輸出值對輸入值是沒有影響的
然而要知道,機械臂有可能因為沾上了水而容易發生偏移,又或者機械臂轉動速度并不是那么精準,是無法達到他洗澡要求的50單位熱水,況且這位老同志突然想改成40單位熱水或者60單位熱水,那么我們又需要重新給這個系統賦予新的輸入值,這是件很麻煩的事情,總不能老同志洗澡的時候,我們闖進去計算輸入值給機械臂吧!
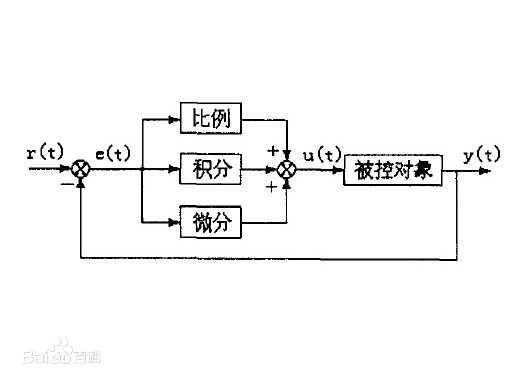
在這里我們更需要一種***倍訓回路控制系統***,在這樣一個系統中,輸入值不在是一個恒定的值,而是會受輸出值的影響,根據當前的熱水總量來重新調整機械臂的轉動力,模式圖如下:

這就是PID控制的基本模式圖
那么這種調整是如何做出來的呢? 我們引入一個誤差值來表示當前值與目標值的差值,當這個誤差值越大時,機械臂的轉動力就越大,并且我們把誤差值與轉動開關的力的關系表示為一個線性關系,同時誤差是關于時間的函式
F
=
K
p
?
e
r
r
o
r
(1)
F=K_p*error\tag{1}
F=Kp??error(1)
e
r
r
o
r
=
f
(
t
)
(2)
error=f(t)\tag{2}
error=f(t)(2)
其中的 kp 是一個系數,由此公式我們可以看出在最初狀態時,機械臂旋轉力量是最大的,隨著誤差越來越小,旋轉力也逐漸減小,熱水量逐漸接近目標值,這就是PID演算法中的 “P” 部分,即***比例部分,它表示的是轉動速度v與誤差error之間的比例關系***,用影像表示即為
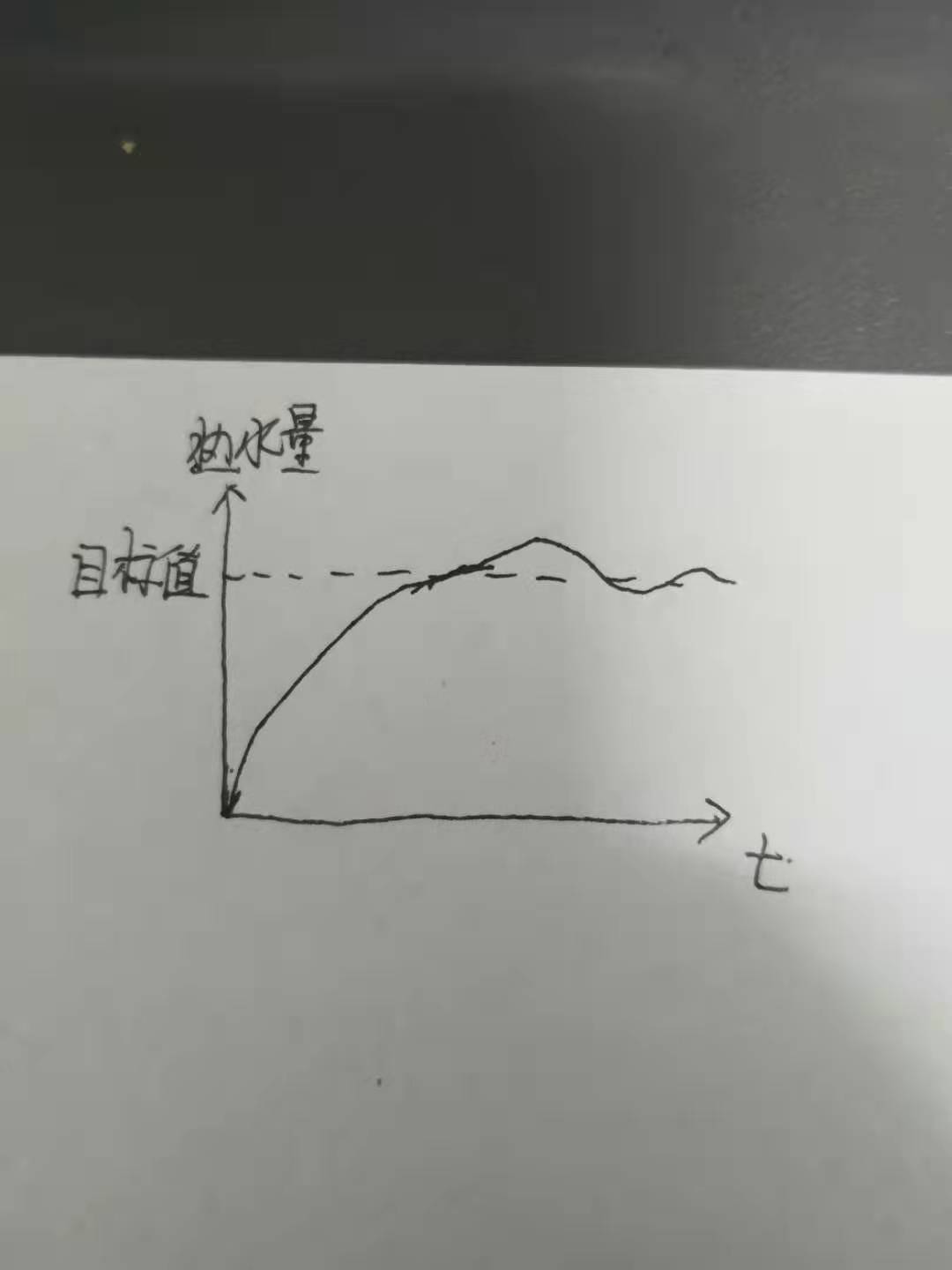
同時通過影像,我們也注意到逐漸接近目標值時,雖然轉動力最侄訓為零,但因為存在著 ***“慣性”***,在接近目標時難免會產生一點溢位,產生額外的誤差,就好比在目標值處加速度雖然為零,但速度仍然存在,是會超過目標值的,說白了,就是春洲師兄手抖抖抖抖抖抖抖了, 況且這種振蕩誤差會因為接近目標值速度過快,即kp過大而愈發明顯, 這是我們就需要介紹PID演算法中的 ***“D”,演算法,即微分演算法,***,我們對誤差進行微分就是造成震蕩溢位的速度,通過這個運算我們可以抵消掉振蕩產生的速度,加入微分運算后PID的簡易數學表達為
F
=
K
p
?
e
r
r
o
r
+
K
d
?
d
(
e
r
r
o
r
)
d
t
(3)
F=K_p*error+K_d*{d(error)\over dt}\tag{3}
F=Kp??error+Kd??dtd(error)?(3)
K
d
=
K
p
?
T
d
(4)
K_d=K_p*T_d\tag{4}
Kd?=Kp??Td?(4)
其中 Kd 為微分系數, Td 為微分時間常數,基本上通過 P 、D 兩種運算我們就能得到一個平穩的影像,
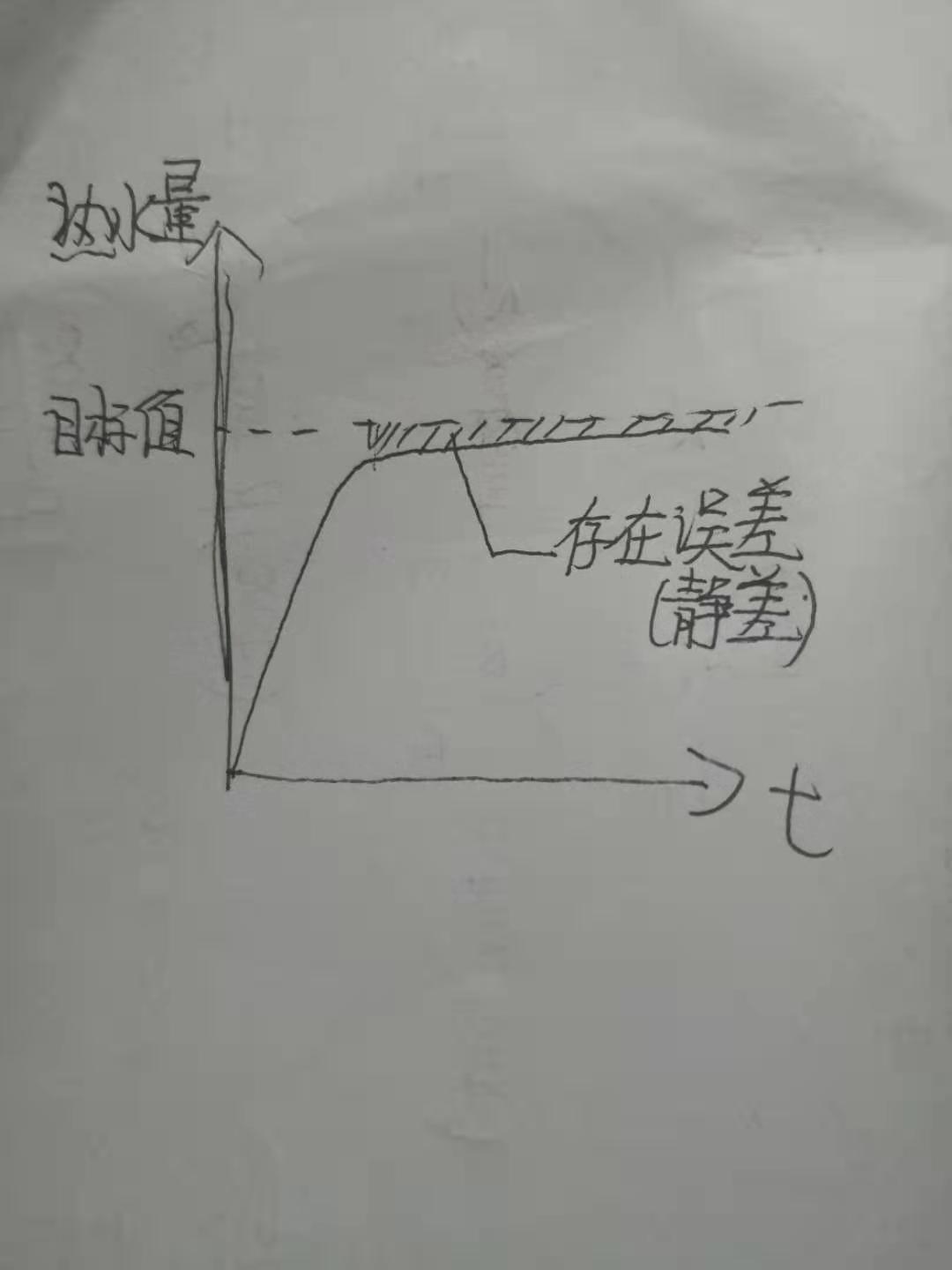
不過細心一些我們就不難發現即使經過了這兩種運算,誤差也是不能被消除的,隨著誤差減小,春洲師兄的機械臂轉動力也減小,最侄訓和阻力平衡,這時開關不會在轉動,誤差仍然存在,也就是說我們還需要抵消掉阻力造成的誤差, 在這里,我們通過累積所有時間段的誤差,得到一個均值再乘以某個系數來提供給春洲師兄更大的轉動力來彌補阻力,數學運算式如下:
F
=
K
p
?
e
r
r
o
r
+
K
d
?
d
(
e
r
r
o
r
)
d
t
+
K
i
?
∫
0
t
(
e
r
r
o
r
)
d
t
(5)
F=K_p*error+K_d*{d(error)\over dt}+K_i*\int_0^t (error)dt \tag{5}
F=Kp??error+Kd??dtd(error)?+Ki??∫0t?(error)dt(5)
K
i
=
K
p
T
i
(6)
K_i={K_p\over T_i}\tag{6}
Ki?=Ti?Kp??(6)
其中 Ti 為積分時間常數,Ki 為積分系數,綜合以上六個式子,我們就得到了PID演算法完整的數學運算式:
F
=
K
p
?
e
r
r
o
r
+
K
d
?
d
(
e
r
r
o
r
)
d
t
+
K
i
?
∫
0
t
(
e
r
r
o
r
)
d
t
F=K_p*error+K_d*{d(error)\over dt}+K_i*\int_0^t (error)dt
F=Kp??error+Kd??dtd(error)?+Ki??∫0t?(error)dt
K
i
=
K
p
T
i
K_i={K_p\over T_i}
Ki?=Ti?Kp??
K
d
=
K
p
?
T
d
K_d=K_p*T_d
Kd?=Kp??Td?
簡易模式圖:
- 關鍵的總結
比例作用是針對系統當前誤差進行控制,積分作用則針對系統誤差的歷史,而微分作用則反映了系統誤差的變化趨勢,這三者的組合是“過去、現在、未來”的完美結合
二、性能指標
其實從上面的概念理解中,我們就很容易通過比例、積分、微分三個環節的作用來衡量這個PID控制是否優越,
- 比例環節可以控制系統的
從最開始到穩定值的時間以及震蕩的程度 - 積分環節可以控制系統
在穩定值時與目標值之間的差距 - 微分環節可以控制系統
穩定值調整到目標值所需時間
于是就產生了四個衡量PID系統的指標:
1、上升時間
t
r
t_r
tr?:從最開始到穩定值的時間
2、超調量
σ
%
\sigma\%
σ%:震蕩的程度
3、穩態誤差
e
s
s
e_{ss}
ess?:在穩定值時與目標值之間的差距
4、調節時間
t
e
t_e
te?:穩定值調整到目標值所需時間
我們就是通過這四個指標來衡量一個PID控制系統性能好壞,而影響這些指標的即是PID演算法公式中的三個系數,所以我們需要通過對這幾個引數進行整定來提高系統的性能,
三、引數選取與整定
我們把目光重新放到PID的數學運算式上,我們不難發現 Kd、Ki的值是和Kp有關的,因此這三個系數的值不是獨立的,當Kp值最優時,另外兩個不一定就是最優的值,我們尋求的不是區域最優,而是三個系陣列合起來的全域最優,
-
Kp使得控制器的輸入輸出成比例關系,為了盡量減小偏差,同時也為了
加快回應速度,縮短調節時間,就需要增大Kp,但比例作用過大會使系統有較大慣性,造成溢位, -
Ki作用的引入有利于
消除穩態誤差,但使系統的穩定性下降,尤其在大偏差階段的積分往往會使系統產生過大的超調,調節時間變長, -
Kd作用的引入使系統能夠根據偏差變化的趨勢做出反應,適當的微分作用可
加快系統回應,有效地減小超調,改善系統的動態特性,增加系統的穩定性,不利之處是微分作用對干擾敏感,使系統抑制干擾能力降低,
因此,PID控制器的引數選取必須兼顧動態與靜態性能指標要求,只有合理地整定Kp、Ki、Kd三個引數,才能獲得比較滿意的控制性能,
下面我們介紹正定引數的方法,
最省事兒的辦法就是先增大 Kp ,當能看到明顯振蕩時,引入Kd并適當減小Kp,如果一直打不到預期值,則引入 Ki并慢慢增大,
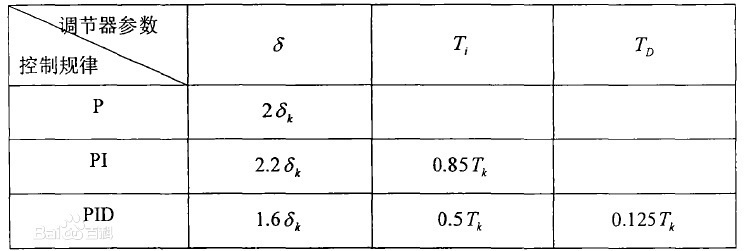
還有一種是正規的方法,臨界比例度法(Z-N法),先只引入比例演算法,從大到小逐漸改變調節器的比例度,得到等幅振蕩的過渡程序,此時的比例度稱為臨界比例度,用
δ
k
{\delta_k}
δk?表示,相鄰兩個波峰間的時間間隔,稱為臨界振蕩周期,用
T
K
{T_K}
TK?表示,用這兩個值根據表格通過計算即可求出調節器的三個整定引數,
四、代碼的具體實作
鑒于代碼量繁雜,以下只展示關鍵代碼部分,我們通過運用PID控制演算法來讓電機勻速穩定轉動 ,下面代碼參考“平衡小車之家”的測驗代碼,其中串口的收發資料幀協議是由正點原子提供
1、主函式
u8 flag_Stop=1; //收發資料的停止標志位
int Encoder; //編碼器脈沖計數
int moto; //電機PWM變數
int main(void)
{
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //中斷分組
Stm32_Clock_Init(9); //系統時鐘設定函式
delay_init(); //延時函式初始化
LED_Init(); //初始化LED的GPIO口
uart_init(115200); //串口初始化
MOTO_Init(); //初始化電機所接GPIO口
pwm_Init(7199,0); //初始化PWM波
Encoder_Init_TIM2(); //初始化定時器
TIM3_Int_Init(99,7199); //初始化中斷函式 每10ms一次中斷
while(1)
{
printf("%d\r\n",Encoder); //通過串口列印脈沖數來形象看到PID控制
delay_ms(10);
}
}
2、串口的初始化與串口收發資料函式
#if EN_USART1_RX //如果使能了接收
//串口1中斷服務程式
//注意,讀取USARTx->SR能避免莫名其妙的錯誤
u8 USART_RX_BUF[USART_REC_LEN];
//接識訓沖區最大存盤USART_REC_LEN個位元組.
//接收狀態
//bit15, 接收完成標志
//bit14, 接收到0x0d
//bit13~0, 接收到的有效位元組數目
u16 USART_RX_STA=0; //接收狀態標記
void uart_init(u32 bound){ //GPIO埠設定
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1|RCC_APB2Periph_GPIOA, ENABLE); //使能USART1,GPIOA時鐘
//USART1_TX GPIOA.9
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //PA.9
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //復用推挽輸出
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA.9
//USART1_RX GPIOA.10初始化
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;//PA10
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//浮空輸入
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA.10
//Usart1 NVIC 配置
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3 ;//搶占優先級3
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //子優先級3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //根據指定的引數初始化VIC暫存器
//USART 初始化設定
USART_InitStructure.USART_BaudRate = bound;//串口波特率
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字長為8位資料格式
USART_InitStructure.USART_StopBits = USART_StopBits_1;//一個停止位
USART_InitStructure.USART_Parity = USART_Parity_No;//無奇偶校驗位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//無硬體資料流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收發模式
USART_Init(USART1, &USART_InitStructure); //初始化串口1
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//開啟串口接受中斷
USART_Cmd(USART1, ENABLE); //使能串口1
}
void USART1_IRQHandler(void) //串口1中斷服務程式
{
u8 Res;
#if SYSTEM_SUPPORT_OS //如果SYSTEM_SUPPORT_OS為真,則需要支持OS.
OSIntEnter();
#endif
if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //接收中斷(接收到的資料必須是0x0d 0x0a結尾)
{
Res =USART_ReceiveData(USART1); //讀取接收到的資料
if((USART_RX_STA&0x8000)==0)//接收未完成
{
if(USART_RX_STA&0x4000)//接收到了0x0d
{
if(Res!=0x0a)USART_RX_STA=0;//接收錯誤,重新開始
else USART_RX_STA|=0x8000; //接收完成了
}
else //還沒收到0X0D
{
if(Res==0x0d)USART_RX_STA|=0x4000;
else
{
USART_RX_BUF[USART_RX_STA&0X3FFF]=Res ;
USART_RX_STA++;
if(USART_RX_STA>(USART_REC_LEN-1))USART_RX_STA=0;//接收資料錯誤,重新開始接收
}
}
}
}
#if SYSTEM_SUPPORT_OS //如果SYSTEM_SUPPORT_OS為真,則需要支持OS.
OSIntExit();
#endif
}
#endif
3、初始化定時器2為編碼器介面模式
void Encoder_Init_TIM2(void)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_ICInitTypeDef TIM_ICInitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);//使能定時器2的時鐘
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);//使能PA埠時鐘
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0|GPIO_Pin_1; //埠配置
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; //浮空輸入
GPIO_Init(GPIOA, &GPIO_InitStructure); //根據設定引數初始化GPIOB
TIM_TimeBaseStructInit(&TIM_TimeBaseStructure);
TIM_TimeBaseStructure.TIM_Prescaler = 0x0; // 預分頻器
TIM_TimeBaseStructure.TIM_Period = ENCODER_TIM_PERIOD-1; //設定計數器自動重裝值
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1;//選擇時鐘分頻:不分頻
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_CenterAligned1;TIM向上計數
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure);
TIM_EncoderInterfaceConfig(TIM2, TIM_EncoderMode_TI12, TIM_ICPolarity_Rising, TIM_ICPolarity_Rising);//使用編碼器模式3
TIM_ICStructInit(&TIM_ICInitStructure); //把TIM_ICInitStruct 中的每一個引數按預設值填入
TIM_ICInitStructure.TIM_ICFilter = 10; //設定濾波器長度
TIM_ICInit(TIM2, &TIM_ICInitStructure);//根據 TIM_ICInitStruct 的引數初始化外設 TIMx
TIM_ClearFlag(TIM2, TIM_FLAG_Update);//清除TIM的更新標志位
TIM_ITConfig(TIM2, TIM_IT_Update, ENABLE);//使能定時器中斷
TIM_SetCounter(TIM2,0);//設定TIMx 計數器暫存器值
TIM_Cmd(TIM2, ENABLE); //使能定時器
}
4、單位時間讀取脈沖數
int Read_Encoder(u8 TIMX)//讀取計數器的值
{
int Encoder_TIM;
//printf("%d\r\n", TIM2->CNT);
switch(TIMX)
{
case 2:Encoder_TIM=(short)TIM2->CNT; TIM2 -> CNT=0;
break;
case 3:Encoder_TIM=(short)TIM3->CNT; TIM3 -> CNT=0;
break;
case 4:Encoder_TIM=(short)TIM4->CNT; TIM4 -> CNT=0;
break;
default: Encoder_TIM=0;
}
return Encoder_TIM;
}
5、定時器3中斷函式(對脈沖計數進行處理)
nt Target_velocity=50; //設定速度控制的目標速度為50個脈沖每10ms
void TIM3_IRQHandler(void)
{
if(TIM_GetFlagStatus(TIM3,TIM_FLAG_Update)==!RESET)
{
TIM_ClearITPendingBit(TIM3,TIM_IT_Update); //===清除定時器1中斷標志位
Encoder=Read_Encoder(2); //取定時器2計數器的值
Led_Flash(100); //LED閃爍
moto=Incremental_PI(Encoder,Target_velocity); //===位置PID控制器
Xianfu_Pwm();
Set_Pwm(moto);
}
}
6、PID演算法核心代碼(其實代碼很簡單)
float Incremental_PI (int Encoder,int Target)
{
float Kp=75,Ki=10;
static float Bias,Pwm,Last_bias;
Bias=Encoder-Target; //計算偏差
Pwm+=Kp*(Bias-Last_bias)+Ki*Bias; //增量式PI控制器
Last_bias=Bias; //保存上一次偏差
return Pwm; //增量輸出
}
7、其他輔助實作PID的函式
void Set_Pwm(int moto)//賦值給PWM暫存器
{
if(moto>0) AIN1=0, AIN2=1;
else AIN1=1, AIN2=0;
PWMA=myabs(moto);
}
void Xianfu_Pwm(void) //限制幅度的函式
{
int Amplitude=7100; //===PWM滿幅是7200 限制在7100
if(moto<-Amplitude) moto = -Amplitude;
if(moto>Amplitude) moto = Amplitude;
}
int myabs(int a) //取絕對值
{
int temp;
if(a<0) temp=-a;
else temp=a;
return temp;
}
我們每隔10ms就將脈沖值通過串口列印出來,并使用一款可以將串口資料繪制成影像的軟體(SerialPlot)來形象感受PID,
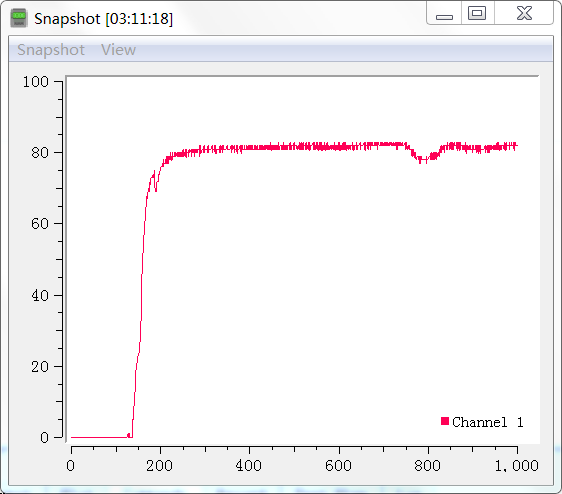
通過影像 我們不難看到回應時間較短,靜差幾乎消除,穩定性較好,這是一個性能較為優越的PID系統,
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/264225.html
標籤:其他