題目2:隱式圖的搜索問題(實驗準備)
- 實驗內容
- 實驗要求
- 編程語言的選擇
- 專案思路
- 專案決議
- 演算法選擇
- A*演算法
實驗內容
- 對九宮重排問題,建立圖的啟發式搜索求解方法;
- 用A*演算法求解九宮重排問題,
實驗要求
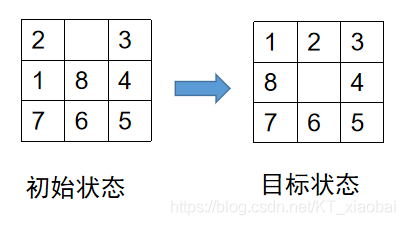
3х3九宮棋盤,放置數碼為1~8的8個棋子,棋盤中留有一個空格,空格周圍的棋子可以移動到空格中,從而改變棋盤的布局,根據給定初始布局和目標布局,移動棋子從初始布局到達目標布局,求解移動步驟并輸出,請設計演算法,使用合適的搜索策略,在較少的空間和時間代價下找到最短路徑,
編程語言的選擇
- 編程語言:Java
- 編譯環境:JDK1.8
- 開發工具:IntelliJ IDEA
專案思路
專案決議
(1)1-8八個數字隨機分布在一個九宮格內
(2)九宮格記憶體在一個無數字格(稱為空格),為方便計算,可用#代替
(3)空格周圍的幾個數字都可與空格互換位置
(4)經過多次互換,使得空格位于九宮格重要,數字1-8從左上角宮格開始,順時針依次排布
(5)從初始狀態經過多次互換達到最終狀態有無數種可能,求最優演算法
演算法選擇
A*演算法
A* 演算法,A*(A-Star)演算法是一種靜態路網中求解最短路徑最有效的直接搜索方法,也是解決許多搜索問題的有效演算法,演算法中的距離估算值與實際值越接近,最終搜索速度越快,
注意——是最有效的直接搜索演算法,之后涌現了很多預處理演算法(如ALT,CH,HL等等),在線查詢效率是A*演算法的數千甚至上萬倍,
公式表示為:f(n)=g(n)+h(n),
其中, f(n) 是從初始狀態經由狀態n到目標狀態的代價估計,
g(n)是在狀態空間中從初始狀態到狀態n的實際代價,
h(n) 是從狀態n到目標狀態的最佳路徑的估計代價,
(對于路徑搜索問題,狀態就是圖中的節點,代價就是距離)
h(n)的選取保證找到最短路徑(最優解的)條件,關鍵在于估價函式f(n)的選取(或者說h(n)的選取),
我們以d(n)表達狀態n到目標狀態的距離,那么h(n)的選取大致有如下三種情況:
(1)如果h(n)<d(n)到目標狀態的實際距離,這種情況下,搜索的點數多,搜索范圍大,效率低,但能得到最優解,
(2)如果h(n)=d(n),即距離估計h(n)等于最短距離,那么搜索將嚴格沿著最短路徑進行, 此時的搜索效率是最高的,
(3)如果h(n)>d(n),搜索的點數少,搜索范圍小,效率高,但不能保證得到最優解,
代碼實作如下:
public static int A_star(int[][] MT) {
// 找到空格所在的位置
int x0 = 0, y0 = 0;
for (x0 = 0; x0 < N; x0++) {
boolean flag = false;
for (y0 = 0; y0 < N; y0++) {
if (MT[x0][y0] == 0) {
flag = true;
break;
}
}
if (flag)
break;
}
// 優先佇列
Queue<node> q = new PriorityQueue<node>(cmp);
int[][] curmt = new int[N][];
int[][] markemt = new int[N][];
// clone方法用于復制一個物件,在記憶體中開辟同樣大小的空間
for (int r = 0; r < N; r++)
curmt[r] = MT[r].clone();
for (int r = 0; r < N; r++)
markemt[r] = MT[r].clone();
List<int[][]> path = new ArrayList<int[][]>();
// path加入初始狀態
path.add(MT);
// 創建一個結點,表示空格,估價函式初始化為0
node cur = new node(x0, y0, 0, 0, 0, curmt, path);
// 將出現過的所有狀態都加入marke集合中
marke.add(markemt);
// 入隊并遍歷
q.add(cur);
while (!q.isEmpty()) {
// 隊首元素出隊
cur = (node) q.poll().clone();
boolean tag = false;
// 判斷當前狀態是不是目標狀態
for (int i = 0; i < N; i++) {
for (int j = 0; j < N; j++) {
if (cur.mt[i][j] != endMT[i][j]) {
tag = true;
}
}
}
// 如果是,輸出結果
if (!tag) {
System.out.println("共擴展了" + marke.size() + "個結點");
return cur.step;
}
// 遍歷四種方向上的移動
for (int i = 0; i < 4; i++) {
node next = (node) cur.clone();
next.x = cur.x + dir[i][0];
next.y = cur.y + dir[i][1];
// 如果空格位置不合法就忽略這個狀態
if (next.x >= 0 && next.x < N && next.y >= 0 && next.y < N) {
// 因為上面next定義時clone了cur,所以在這里更新空格的位置
next.mt[cur.x][cur.y] = next.mt[next.x][next.y];
next.mt[next.x][next.y] = 0;
boolean mark = false;
// 判斷當前狀態有沒有出現過
for (int c = 0; c < marke.size(); c++) {
int x = 0, y = 0;
for (x = 0; x < N; x++) {
for (y = 0; y < N; y++)
if (marke.get(c)[x][y] != next.mt[x][y])
break;
if (y < N)
break;
}
if (x == N && y == N)
mark = true;
}
// 若出現過則忽略這個狀態
if (!mark) {
// 更新next的屬性值step和估價函式g
next.step++;
next.g++;
// 將當前狀態加入到結點的path中,因為程式中定義結點時,clone了上一個結點,所以在當前結點添加的狀態也會clone到下一個結點中,
next.path.add(next.mt);
// 計算估價函式h,獲取每個位置的數字,到達目標狀態中對應數字的位置,所需要的步數
int count = 0;
for (int row = 0; row < N; row++) {
for (int cow = 0; cow < N; cow++) {
if (cow != 0 && next.mt[row][cow] != endMT[row][cow]) {
count += Math.abs(row - map.get(next.mt[row][cow])[0])
+ Math.abs(cow - map.get(next.mt[row][cow])[1]);
}
}
}
next.h = count;
// 將擴展狀態入隊
int[][] newmt = new int[N][];
for (int r = 0; r < N; r++)
newmt[r] = next.mt[r].clone();
marke.add(newmt);
q.add((node) next.clone());
}
}
}
}
return 0;
}
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/265489.html
標籤:其他