?2019.3一2019.7 基于MK60DN512ZVLQ10 的室外自動尋跡智能越野車(集體專案)
? 2020.3一2020.7 基于NXP i.MX RT1064的電磁AI尋跡智能小車(集體專案)
軟體環境:
keil5 IDE、Altium Designer 17
硬體環境:
NXP MK60DN512ZVLQ10 MCU(2019)、NXP i.MX RT1064 MCU(2020)
專案描述:
此專案為第十四屆、第十五屆全國大學生恩智浦杯智能汽車競賽室外越野競速專案,依照組委會公布的比賽規則,我們運用了上述的技術點,克服賽道中的坡道、橫斷路障等元素實作了小車沿賽道的自動尋跡,分別榮獲西部賽區二等獎、華南賽區二等獎,
運用的技術點:
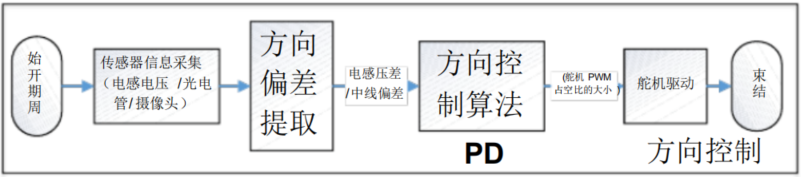
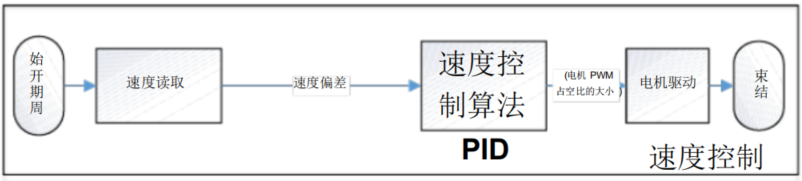
1.PID控制演算法: 小車方向控制采用位置式PD控制,速度控制采用雙反饋增量式PID控制,
2.濾波演算法: 冒泡排序-中位均值濾波、限幅濾波,
3.MCU模塊: FTM、PIT中斷、I/O、外部中斷、模擬SPI、UART、KBI中斷、ADC,
4.路徑識別模塊: LC并聯諧振選頻放大檢波電路、MCU ADC轉換、HC-SR04超聲波測距,
5.測速模塊: 512線編碼器、MCU正交解碼,
6.人機互動界面: 按鍵中斷、OLED顯示屏、MCU模擬SPI驅動顯示,
7.電機驅動模塊: HIP4082+LR7843 4MOS管H橋電機驅動電路、MCU FTM產生PWM波,
8、AI機器學習: 方向控制采用訓練好的模型進行控制(2020)
個人職責:
第十四屆(2019年)擔任車隊硬體負責人,主要負責硬體電路設計,主要有電機H橋驅動電路,電磁信號采集電路、核心中控電路,同時負責專案MCU、傳感器選型,
第十五屆(2020年)擔任校智能車隊總負責人,與組員、其他隊伍一起開發小車的軟體和硬體,統籌專案進度與計劃;主要負責小車軟硬體的架構設計,
講述:專案的硬體核心處理器NXP MK60DN512ZVLQ10 MCU(2019)、NXP i.MX RT1064 MCU(2020)
| 引數 | K60DN512 | 補充 | i.MX RT1064 | 補充 |
|---|---|---|---|---|
| 主頻 | 100MHZ | 600MHZ | ||
| 內核 | ARM-Cortex-M4 | ARM-Cortex-M7 | ||
| SRAM | 128k | 1M | 外置32M | |
| Flash | 512k | 4M | ||
| UART | 6個 | 8個 | ||
| SPI | 3個 | 2個 | ||
| I2C | 2個 | 4個 | ||
| I2S | 1個 | 3個 | ||
| CAN | 2個 | 2個 | ||
| 16位ADC模塊 | 2個 | |||
| 12位ADC模塊 | 2個 | 2個 | ||
| FTM模塊 | 3個 | 4個 | ||
| 16位定時器 | 13個 | 4個 | ||
| 32位定時器 | 4個 | 6個 | ||
| 外部中斷 | 所有IO都支持 |
選這款芯片的原因是內置的UART、SPI、ADC都十分符合我們的需求,我們最重要的ADC采集部分用了10路, FTM模塊用了5個(2個電機、2個編碼器、1個舵機)、OLED使用SPI,硬體部分:電機H橋驅動電路,電磁信號采集電路、核心中控電路,
功能:
克服賽道中的坡道、環島、橫斷路障、十字路口等元素實作了小車沿賽道的自動尋跡,各個學校相同賽道完成,比速度(2.1米/秒,16/50,2.7米/秒、17/50)
技術點說明:
軟體部分:
1.PID控制演算法:
P比例環節:及時成比例地反映控制系統的偏差信號,偏差一旦產生,控制器立即產生控制作用,以減少偏差,
I積分環節:主要用于消除靜差,提高系統的無差度,積分作用的強弱取決于積分時間常數,越大,積分作用越弱,反之則越強,
D微分環節:能反映偏差信號的變化趨勢(變化速率),并能在該偏差信號變得太大之前,在系統中引入一個有效的早期修正信號,從而加快系統的動作速度,減小調節時間,
在計算機控制系統中,數字 PID 控制演算法通常又分為位置式 PID 和增量式 PID,
小車方向控制采用位置式PD控制,速度控制采用雙反饋增量式PID控制,
輸出量 =P誤差+I誤差的積分+D*誤差的變化
4.3.1位置式PID
位置式PID中,由于計算機輸出的u(k)直接去控制執行機構(如閥門),
位置式PID控制演算法的缺點是:由于全量輸出,所以每次輸出均與過去的狀態有關,計算時要對過去e(k)進行累加,計算機作業量大;
PID控制:DUTY+Kperror+Ki error_integral+Kd*(current_error-last_error)
PD控制:DUTY+Kperror+Kd(current_error-last_error)
PD控制
1) 若偏差正在減小的程序, PD控制的量要比純比例
控制量小一些,這樣能夠避免過度控制
2) 若偏差在逐漸增加的程序, PD所要施加的量比純
比例要多一些,目的是為了抑制誤差增大的趨勢,
所以 D 這一項有一些預測控制的味道 ,相比 P 而言要更智能一些
4.3.2增量式PID
當執行機構需要的是控制量的增量(例如:驅動步進電機)時,增量的PID控制算式:

最后選用的采樣周期為 20ms,即每 20ms 對電機
進行一次 PID 調節,
增量型演算法與位置型演算法相比,具有以下優點:增量型演算法不需要做累加,增量的確定僅與最近幾次偏差采樣值有關,計算精度對控制量的計算影響較小,而位置型演算法要用到過去偏差的累加值,容易產生大的累加誤差;增量型演算法得出的是控制量的增量,而位置型演算法的輸出是控制量的全量輸出,誤動作影響大;采用增量型演算法,易于實作手動到自動的無沖擊切換
2.濾波演算法: 冒泡排序-中位均值濾波、限幅濾波,
單片機會連續對每個電感采集5次,使用冒泡法將資料從小到大排序后,去掉最大值和最小值,取平均值作為該次采集的數值,經測驗,該濾波效果較好,可以濾掉部分高頻噪聲,獲得的電感值穩定,獲得電感值后,對當前采集到的值進行歸一化處理,歸一化的基本思想是:取得當前采集值(ADget)相對于當前賽道的最大值(ADMAX)、最小值(ADMIN)的相對大小,具體公式為:
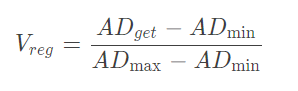
歸一化之后,通過對多個方向的電感值融合,獲得作為PID輸入的偏差,
3.MCU模塊: FTM、PIT中斷、I/O、外部中斷、模擬SPI、UART、ADC,
FTM全稱FlexTimer Module (柔性定時器模塊)
FTM模塊的核心是一個16位計數器,該計數器的時鐘來源可設定(系統時鐘(一般選擇)、外部時鐘)
作為一個高級單片機里的定時器模塊,FTM模塊具有多種功能供用戶使用,例如輸入捕獲,輸出比較,PWM比較,PWM輸出,AB相正交解碼等等
通過配置暫存器,單個FTM模塊的不同通道可以作業在不同模式下,
單個模塊下各個通道間PWM頻率必須相同,可以有不同的占空比,(原因是配置頻率的暫存器每個模塊只有一個,配置占空比的寄存處每個通道就有一個)(智能車比賽中舵機一般均為50Hz,電機一般5~20 KHz不等)
4.路徑識別模塊: LC并聯諧振選頻放大檢波電路、MCU ADC轉換、HC-SR04超聲波測距,
5.測速模塊: 512線編碼器、MCU正交解碼,
采用增量式512線光電編碼器,其供電電壓為3.3V或5V,輸出為小幅值的正弦信號,為了將此信號放大整形,設計了信號調理電路,其基本原理是使用一個運放做成比較器電路,調節參考電壓,使輸出變為0V-3.3V的方波信號,送入單片機進行運算,
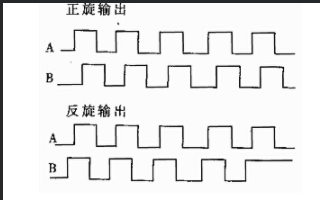
兩相輸出的增量型旋轉編碼器,這種編碼器輸出A、B兩相脈沖,這兩組脈沖不僅能夠表示轉速,還能表示方向,如圖所示,A相和B相脈沖數均表示轉數,但當A相信號相位超前時,表示正轉;B相信號相位超前時,表示反轉:
編碼器輸出的兩相脈沖需要靠單片機進行解碼才能讀取轉速資訊,FTM模塊就提供了正交解碼這種作業模式,通過這種模式,它可以將輸入的A、B兩相脈沖解碼后得到計數值,進而我們就可以獲得轉速資訊進行倍訓控制,
正交解碼模式下可以通過 暫存器進行相關功能的配置,在該模式下有計數/方向編碼模式和 AB相編碼模式,
計數/方向編碼模式:B相輸入值用于指示計數方向,A相輸入用于計數,FTM計數器在A相輸入的每個上升沿進行計數,累加或遞減由B相電平決定,
AB相編碼模式:計數方向由AB相之間的關系決定,計數頻率由A相B相輸入信號決定,當A相或B相的信號出現跳變,即可觸發FTM計數器改變,
6.人機互動界面: 按鍵中斷、OLED顯示屏、MCU模擬SPI驅動顯示,
7.電機驅動模塊: HIP4082+LR7843 4MOS管H橋電機驅動電路、MCU FTM產生PWM波,
8、AI機器學習: 方向控制采用訓練好的模型進行控制(2020)
硬體部分:
伺服電機為S3010舵機,6V電壓時扭力可達6.5kg·cm,動作速度快
電源部分:
由于電路中的不同電路模塊所需要的作業電壓和電流容量各不相同,因此電源模塊應該包含多個穩壓電路,將充電電池電壓轉換成各個模塊所需要的電壓,
為滿足需要,本車模上存在4種供電電壓:
(1) 智能車使用鋰電池供電,選擇帶均衡功能的保護板可以同時給兩節電池充電,正常使用時電壓在7.4~8.4V,可直接用于電機供電,
(2) 使用穩壓芯片tps76850 輸出電壓5V,用于rt1064、隔離芯片、運放、霍爾元件、編碼器等供電,
(3) 使用穩壓芯片tps76833 輸出電壓3.3V,用于OLED、蜂鳴器、按鍵、等供電,
(4) 使用升壓芯片bo512輸出電壓12V,用于全橋驅動器HIP4082的供電,
(5) 使用開關穩壓芯片AS1015輸出5.95V電壓給舵機供電,用電池直接供電容易啥訓舵機,AS1015具有防止電流反灌功能有效提高舵機使用壽命,
電機驅動電路:
ir7843光耦隔離、數字芯片隔離
我主要負責的作業是資料的采集,采集資料分為三個,第一:跑的穩定的最快速度
比賽規模:
全國大學生A類競賽,舉辦了15年,每年大約1萬人參賽,2000多個隊伍
電磁運放電路:
采用簡單的同向比例放大電路,電位器可用來調節放大倍數,通過對電磁信號進行放大和檢波處理和可以直接供單片機的AD口讀取,運放芯片使用性價比較高的OPA4377來以滿足20kHz的電感采集需求,
除錯能力的說明:
專案在除錯的程序,用的是串口除錯助手,keil自帶的除錯、藍牙、OLED屏等等,通過設定標志位、單片機發送出來的資料來進行專案除錯,硬體部分則是通過仿真、示波器、萬用表來進行除錯,
除錯通常是分模塊來進行,同時使用一些變數模擬,當功能都調通以后,再接入模塊來做硬體相關的效果測驗,
在除錯PID引數時,通常使用虛擬示波器,將電機的輸出引數列印到電腦,
專案初期,代碼寫的比較亂,因為模塊比較多,控制的硬體也多,導致專案的代碼結構很差,容易出問題,后來對專案進行模塊化的封裝,
結尾
通過這個專案,我的識訓是軟體代碼如何對硬體完成控制,幾個電路的設計,對單片機的IO口,串口,定時器等基本開發很熟悉了,同時對專案的代碼除錯能力得到強化,整個代碼量達到1000多行,代碼結構很清晰,C語言編程能力得到很大的提升,
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/265993.html
標籤:其他