合肥光源儲存環束流三維引數測量系統的初步結果1
上輪維護查線后,后來接上紐扣電極BPM,核對演算法并且用2G帶寬的鼎陽示波器測量的結果,經過不斷的資料積累的觀察,感覺這次測得結果越來越靠譜了,慢慢展示如下:
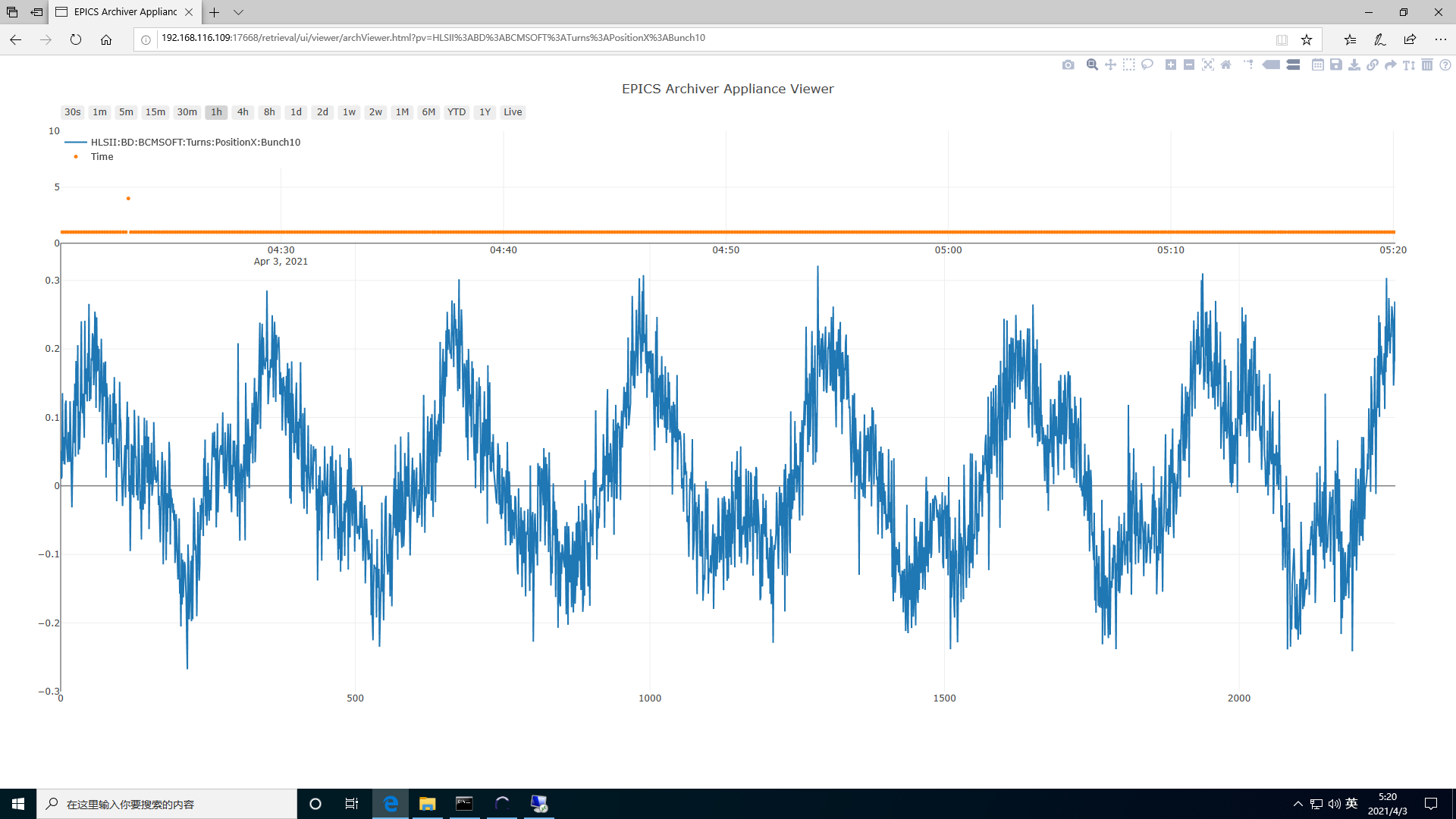
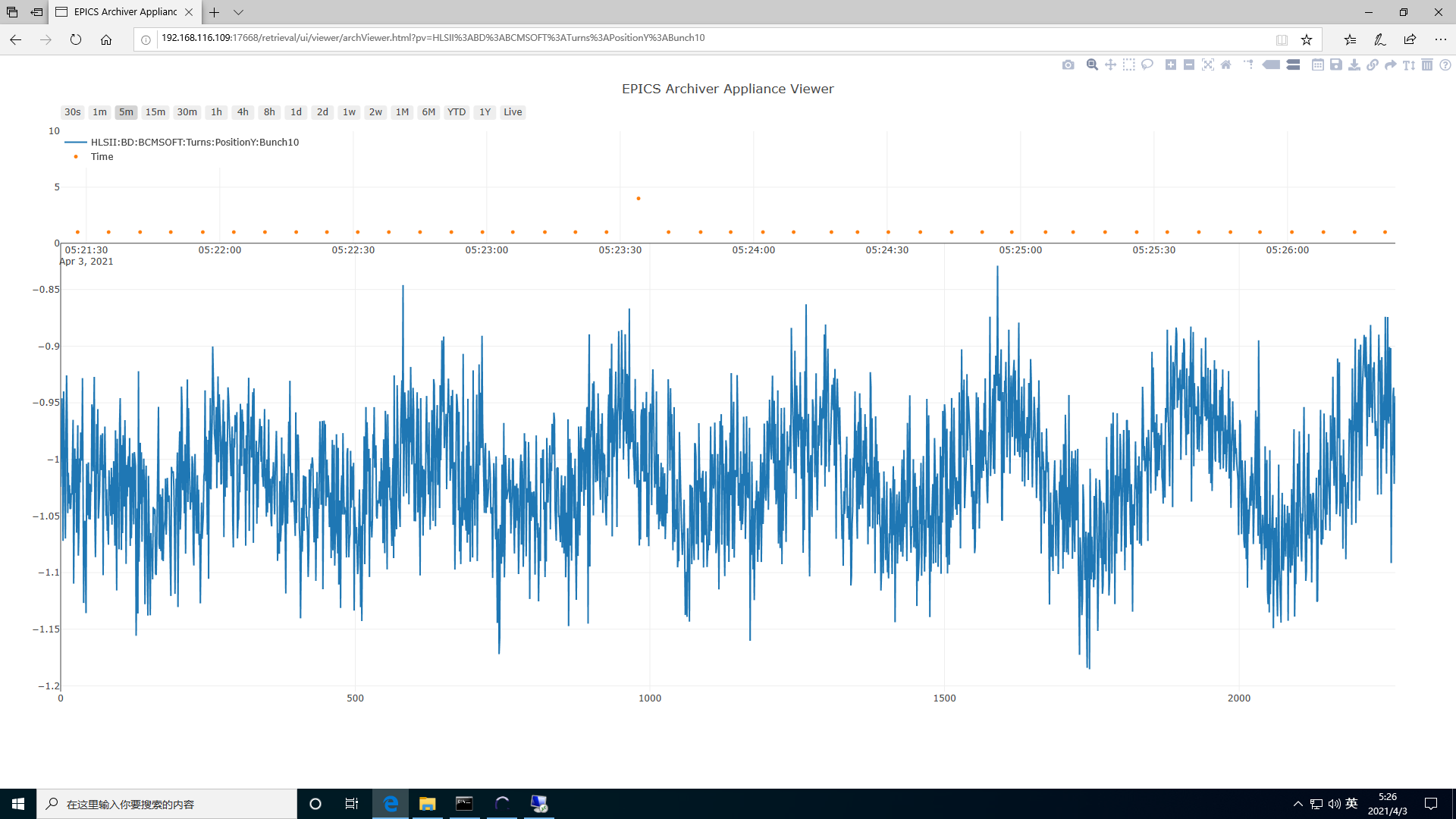
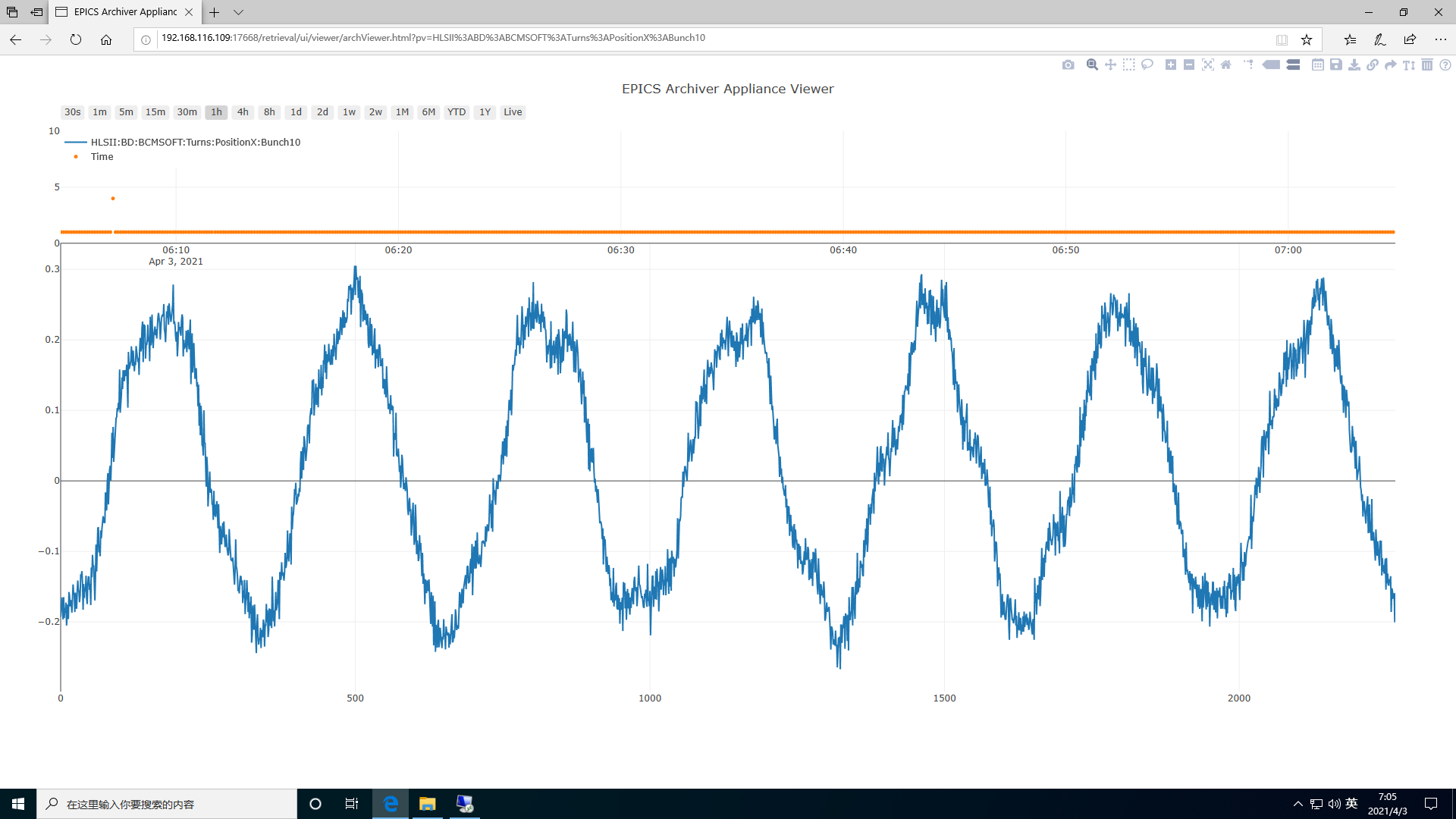
每個束團逐圈的X,Y位置如上圖中,基本上分別在正負0.4mm和0.2mm的范圍(最大值-最小值分別為0.8和0.4mm),隨便一個束團的逐圈曲線如下:
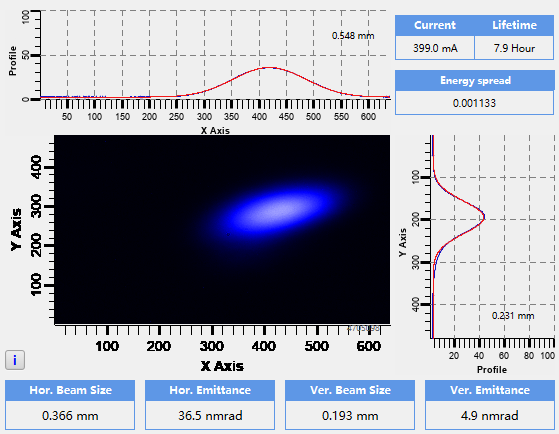
通過X,Y的逐圈位置范圍換算出的rms和同步光監測算得的光源點的尺寸是符合的:
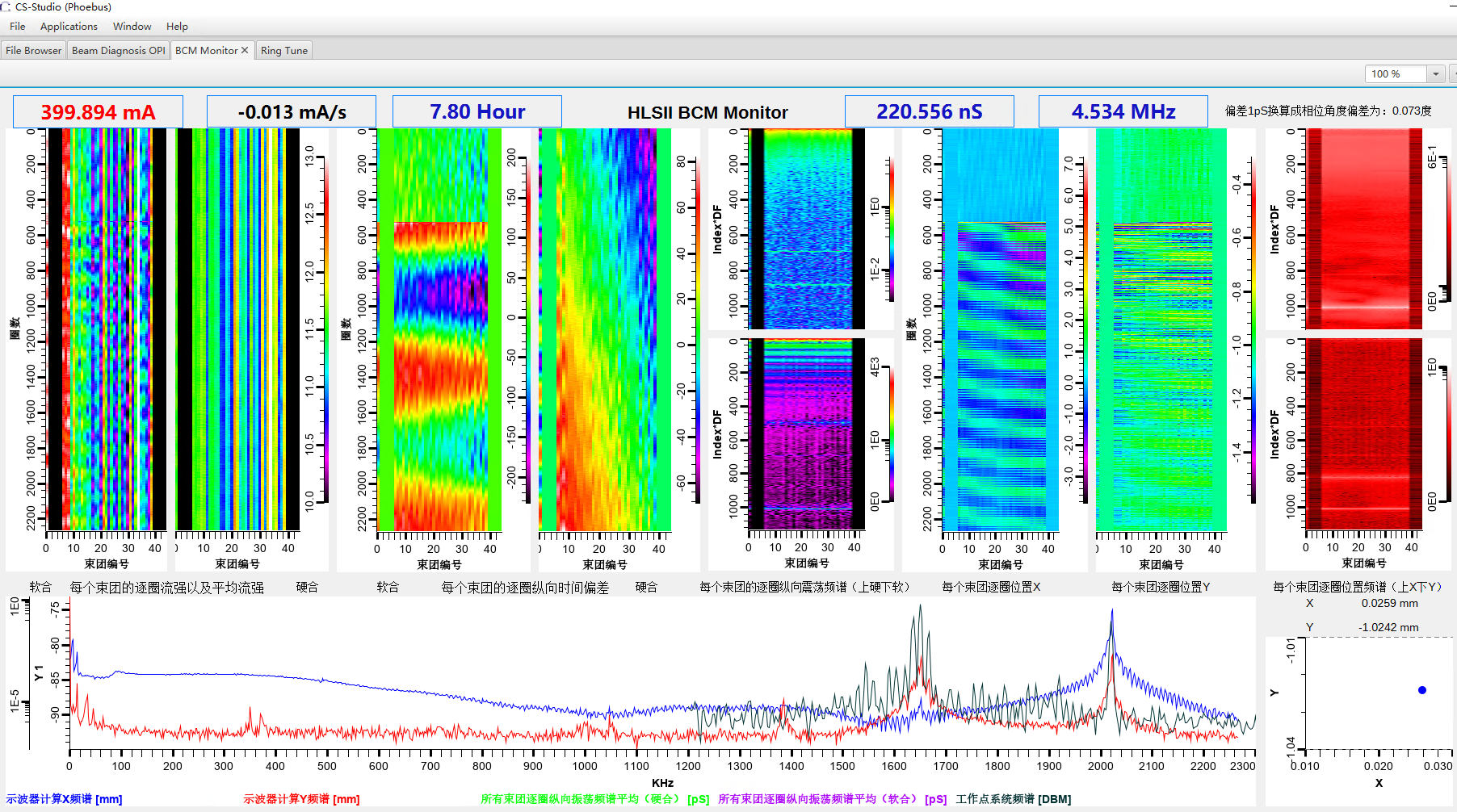
這段時間我撰寫示波器的采集程式并初步分析,算出結果并發布,之后雷雷讀取PV和資料庫來做進一步分析并給出指導意見,配合的相當默契,前段時間接條帶BPM測量的時候(不知道是條帶,當成紐扣去算),雖然測量的結果一塌糊涂,不過雷雷從分析中發現如果能按204M左右的整數倍去采樣的話頻譜會更好些,當時采集程式還很粗陋,忙著補缺和增加我想要的功能,就一直沒著手在程式中放入重采樣的功能,這不,測量的結果靠譜之后,就把這部分加進來了:
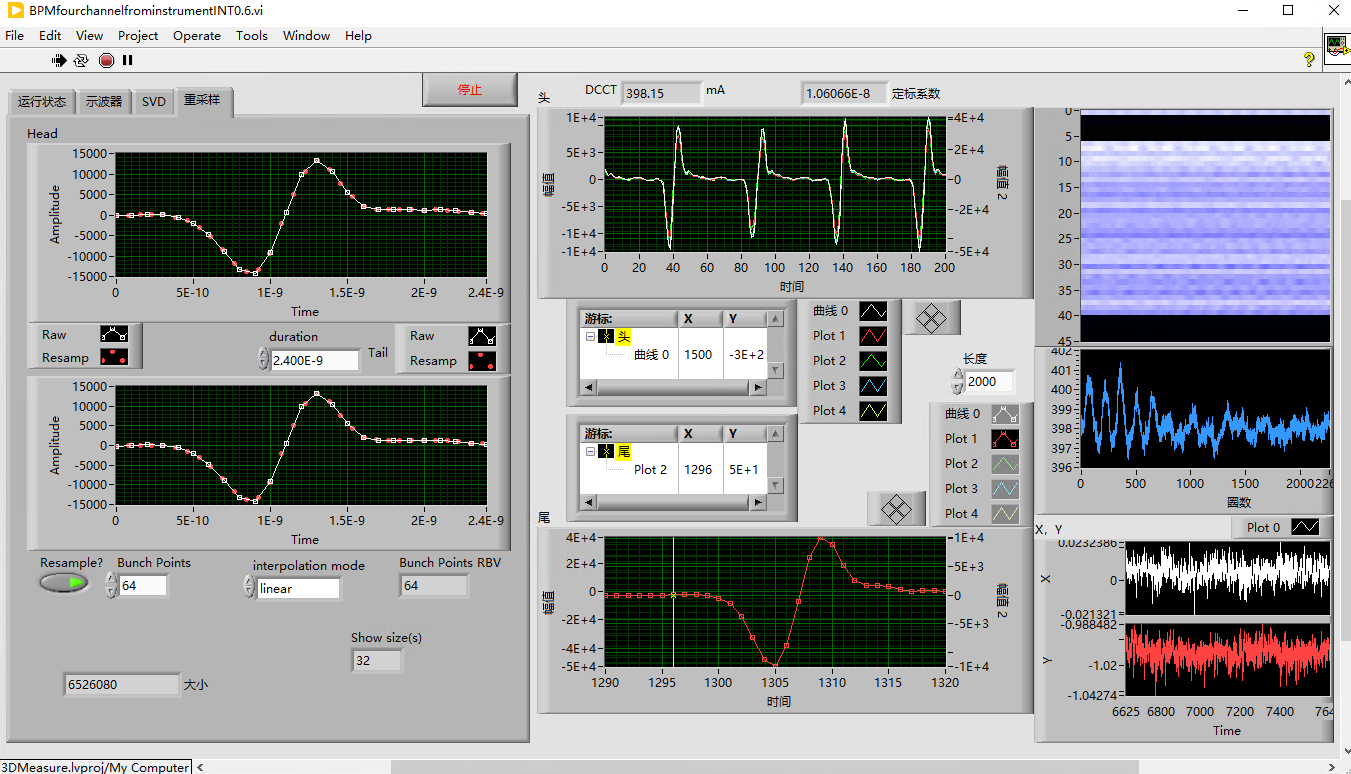
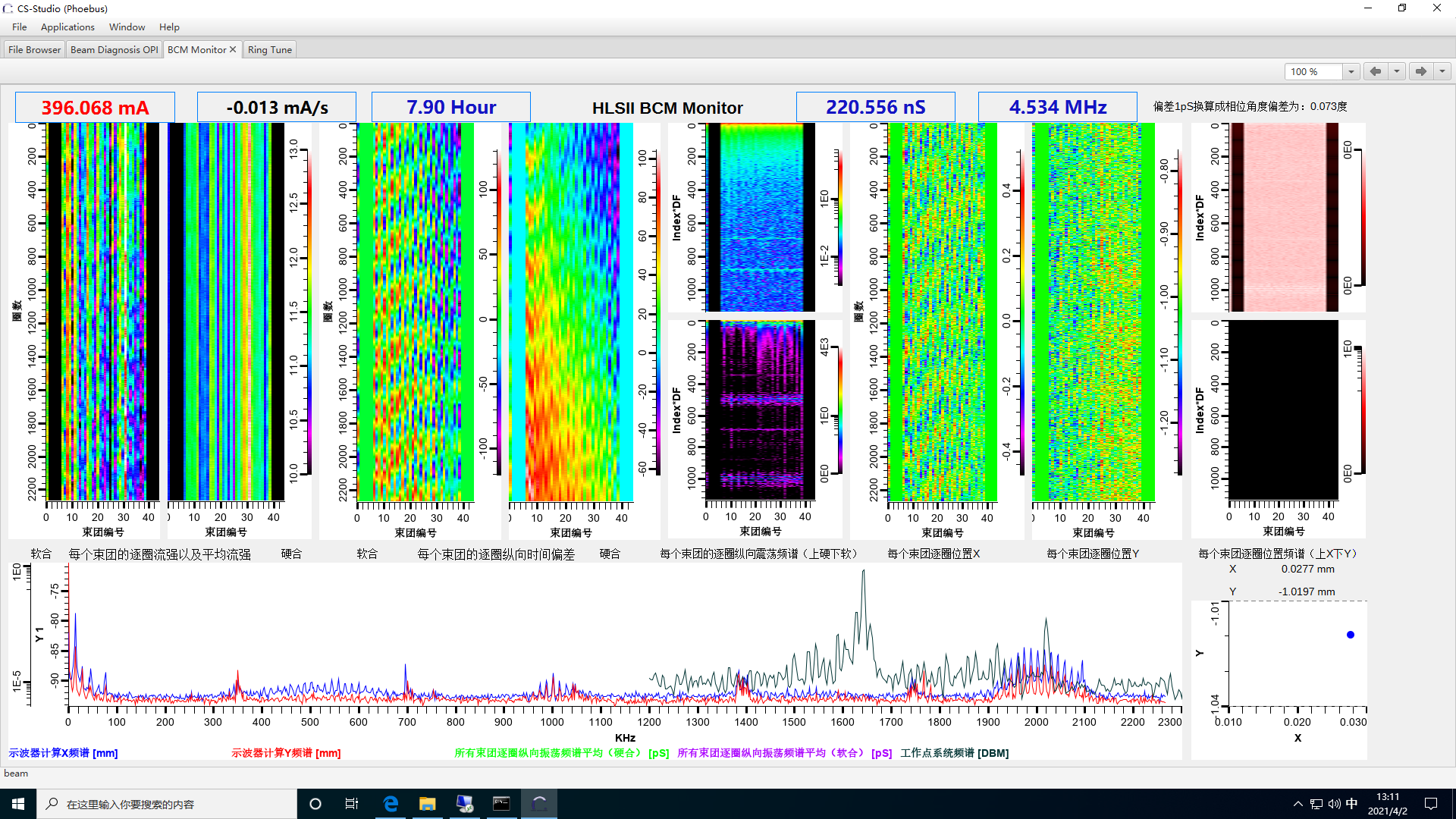
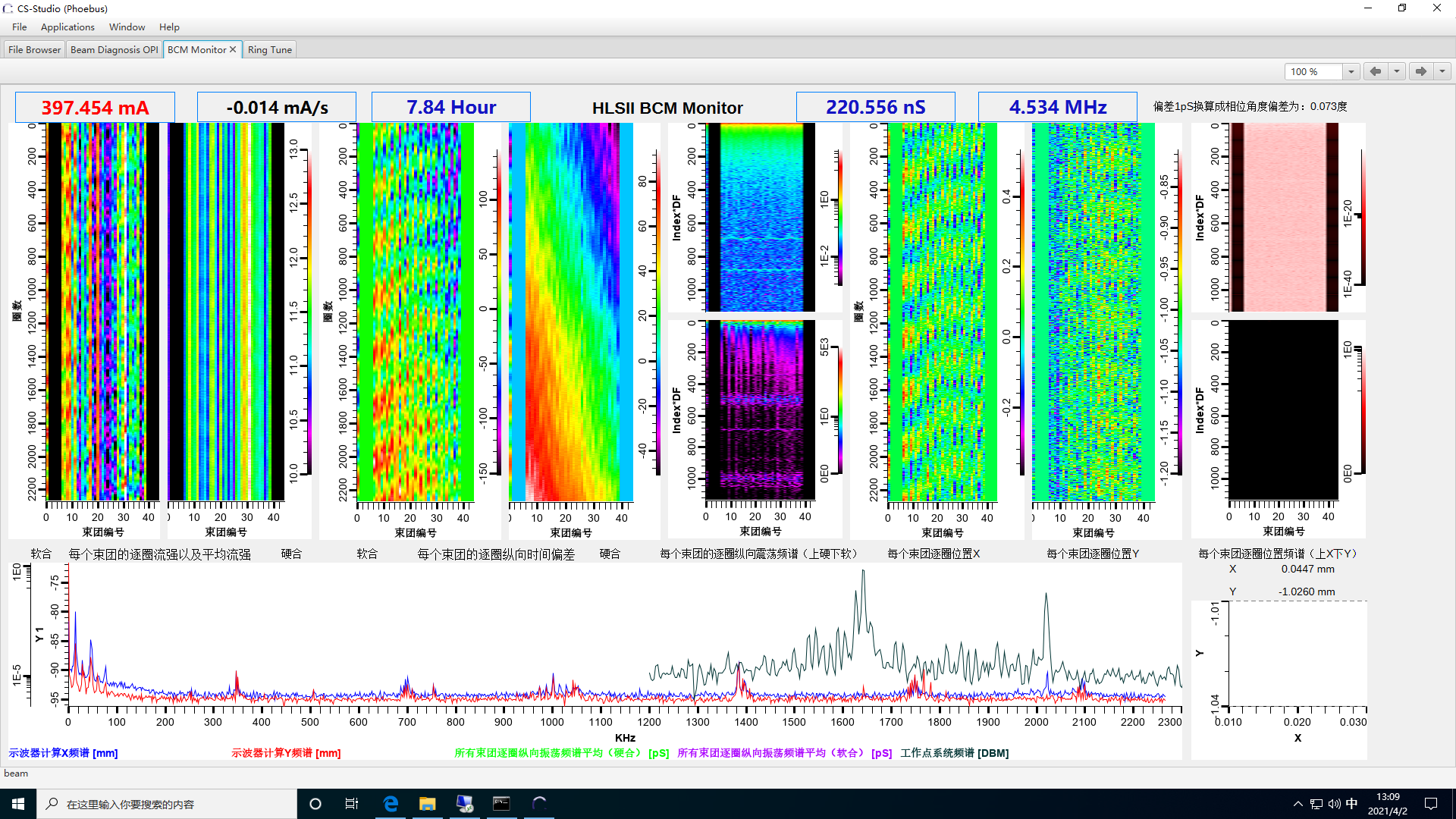
示波器是10GHz的采樣率,和其最接近的204.534M的整數倍差不多是204.534*49=9997.47MHz,和10G會有差,做FFT的時候就會產生很多雜峰,比如上面那個phoebus界面中: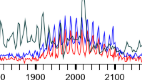

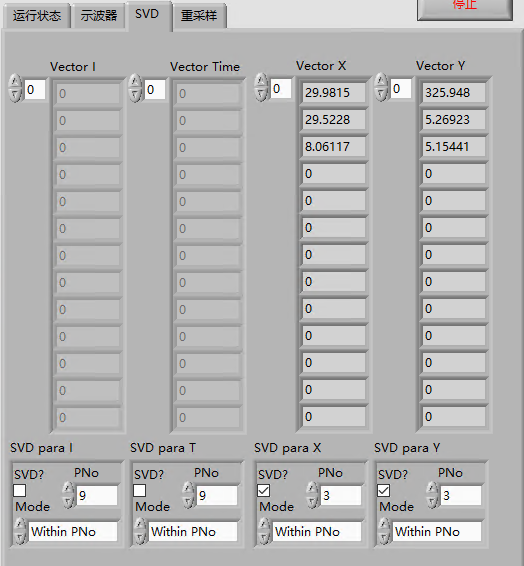
經過重采樣的插值處理原始波形資料后,如上面程式界面圖,可以設定每個束團的采樣點數,比如64,相當于64*204.534M的采樣率,雖然只是簡單的線性插值,但是FFT后的頻譜就好多了:
雜峰都沒有了,并且有新發現: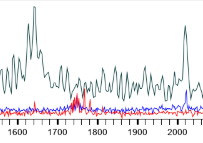
灰線是BBQ作業點測得的頻譜下邊帶峰位,藍線和紅線分別是X,Y的逐圈位置頻譜,雖然那兩個小峰不高,但是很明顯的和作業點峰位對應并穩定在那!![]() (這里要高興的跳一跳)
(這里要高興的跳一跳)
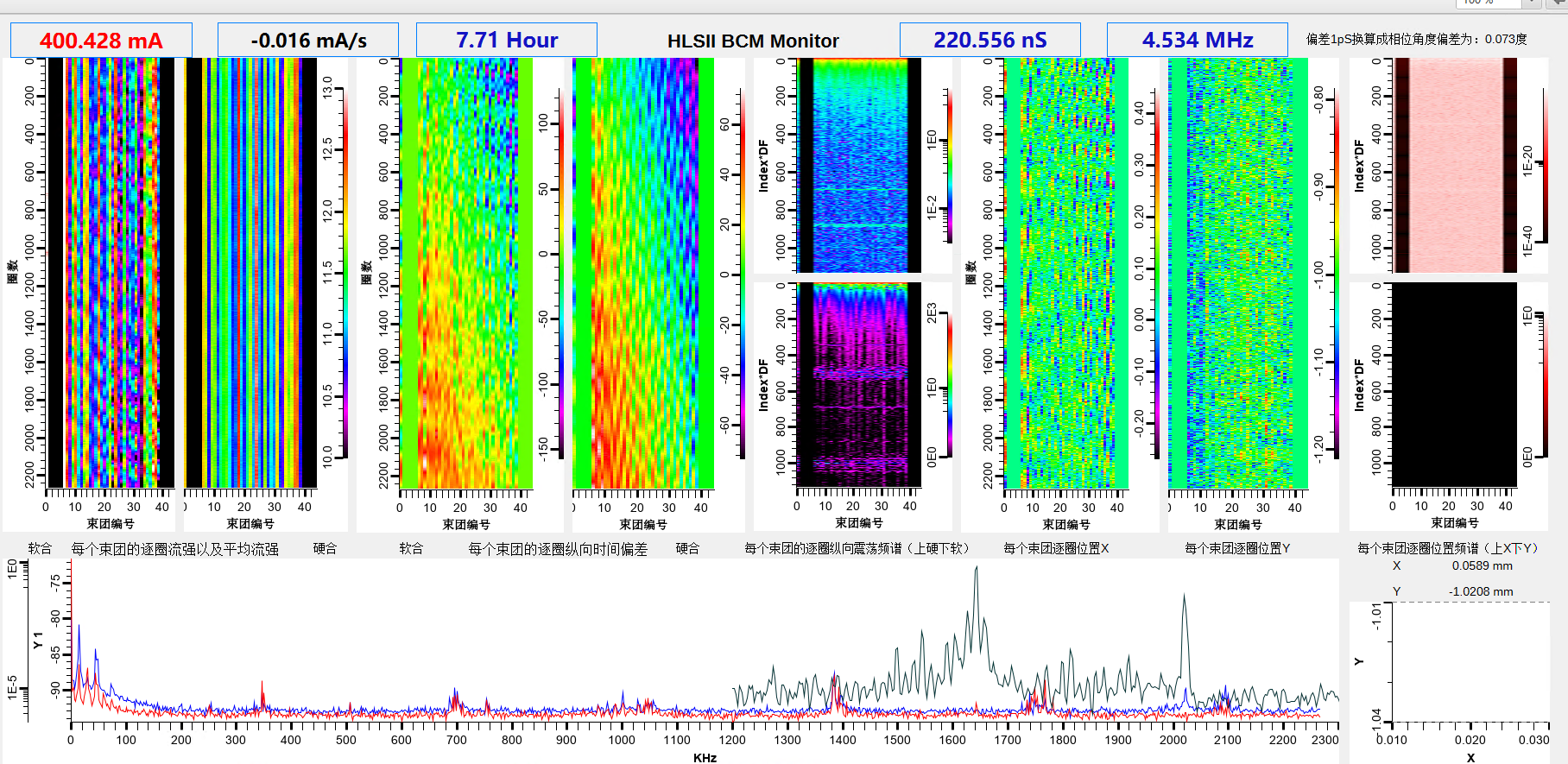
下一步試試雷雷說的陷波濾波,看能不能露的更明顯些,這兩個標記的小峰,本來只能在注入時才能看到的作業點峰位,現在這個3D引數測量系統平常就可以看到了,下圖是注入時的X,Y頻譜:
頻譜除了作業點峰位以外,還有幾個很固定的峰位,一直不知道是怎么來的,有待慢慢核查,
前段時間錯誤的把條帶當成紐扣,測量和計算的結果一塌糊涂,搞得心灰意冷,就讓雷雷把縱向震蕩相關的內容整理下發篇論文就好了,這幾天的資料積累和觀察,發現不斷地有新的好玩的東西,X,Y相關的結果也靠譜了,估計又要折騰雷雷加進去了,
采集程式里,對于每個通道5百萬個點共4個通道的大陣列,10G采樣率,分給每個束團差不多49.01個點,雖然只是簡單的線性插值重采樣,點數搞多了也會拖累回圈速度,很擔心如果再加上濾波之類的會拖累到什么程度,本來從示波器讀取波形周期是7秒的,我還嫌慢,可是插值稍多些,回圈周期就超過7秒了,如果采用樣條插值,算量更多,周期更長,,,,對這類大資料的快速處理,以后再想辦法吧,看到這里的專家如果碰到過類似的需求并解決,一定不吝賜教,
不過即使這樣的不多點的插值重采樣,結果還是不錯的,使用SVD提取主成分,丟掉其他的紋波會更纖細:
隨便一個束團的X的逐圈位置曲線,和上面的比是不是好一點:
看各束團逐圈資訊的影像,就像水面上的漣漪一樣,每個束團的逐圈資訊頻譜,本來應該是分離獨立的,但是放在一起看,卻感覺到其之間似有某種關聯一樣:
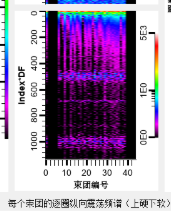 比如這個頻譜圖,本來45個洞洞的流水,應該各流各的,可是有些鬧來鬧去,流到別人的碗里去了,,,這類的影像,看動態的變來變去更好玩,愿意看的自己去中控室看吧,
比如這個頻譜圖,本來45個洞洞的流水,應該各流各的,可是有些鬧來鬧去,流到別人的碗里去了,,,這類的影像,看動態的變來變去更好玩,愿意看的自己去中控室看吧,
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/272310.html
標籤:其他