日常實驗中,從源點云中截取部分點云,其質心往往會不同程度的偏離原點(0,0,0),為便于實驗研究,可將其執行去質心處理,主要分為兩個步驟:①求質心;②去質心
本文通過 pcl::compute3DCentroid() 函式求點云質心,然后借助 pcl::demeanPointCloud 實作去質心操作,也可以自己寫回圈實作,兩種方式都可以實作去點云質心,
實作代碼:
#include <iostream>
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#include <pcl/common/centroid.h>
using namespace std;
int main()
{
pcl::PointCloud<pcl::PointXYZRGB>::Ptr cloud_in(new pcl::PointCloud<pcl::PointXYZRGB>);
//加載點云
if (pcl::io::loadPCDFile("tree.pcd", *cloud_in) < 0)
{
PCL_ERROR("該點云檔案不存在!\n");
return -1;
}
//計算輸入點云質心
Eigen::Vector4f centroid_in;
pcl::compute3DCentroid(*cloud_in, centroid_in);
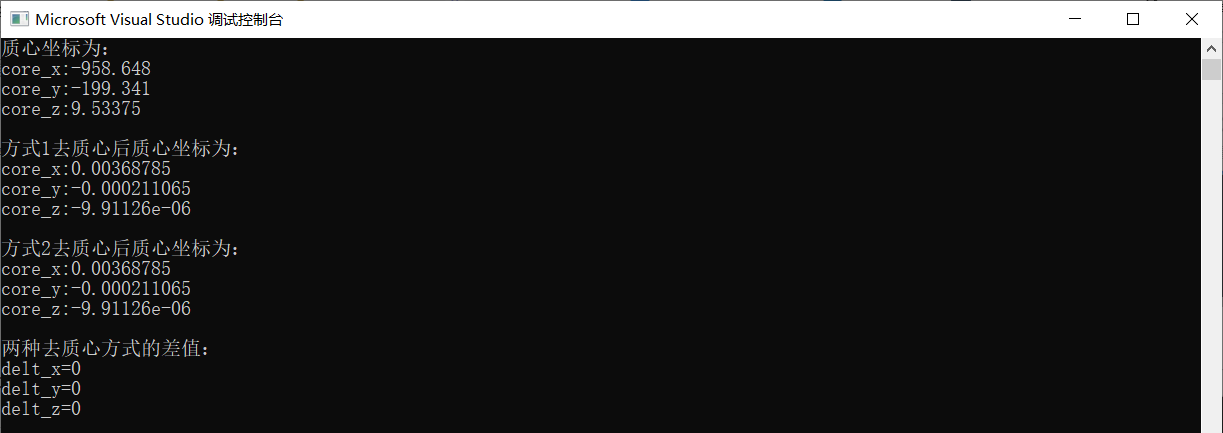
cout << "zhi心坐標為:\n"
<< "core_x:" << centroid_in[0] << endl
<< "core_y:" << centroid_in[1] << endl
<< "core_z:" << centroid_in[2] << endl;
/*-----執行去質心-----*/
//方式1:呼叫demeanPointCloud()函式
pcl::PointCloud<pcl::PointXYZRGB>::Ptr cloud_out1(new pcl::PointCloud<pcl::PointXYZRGB>);
pcl::demeanPointCloud(*cloud_in, centroid_in, *cloud_out1);
//計算去質心后點云質心
Eigen::Vector4f centroid_out1;
pcl::compute3DCentroid(*cloud_out1, centroid_out1);
cout << "方式1去質心后質心坐標為:\n"
<< "core_x:" << centroid_out1[0] << endl
<< "core_y:" << centroid_out1[1] << endl
<< "core_z:" << centroid_out1[2] << endl;
//方式2:回圈實作
pcl::PointCloud<pcl::PointXYZRGB>::Ptr cloud_out2(new pcl::PointCloud<pcl::PointXYZRGB>);
*cloud_out2 = *cloud_in;
for (size_t i = 0; i < cloud_in->size(); ++i)
{
cloud_out2->points[i].x = cloud_in->points[i].x - centroid_in[0];
cloud_out2->points[i].y = cloud_in->points[i].y - centroid_in[1];
cloud_out2->points[i].z = cloud_in->points[i].z - centroid_in[2];
}
//計算去質心后點云質心
Eigen::Vector4f centroid_out2;
pcl::compute3DCentroid(*cloud_out2, centroid_out2);
cout << "方式2去質心后質心坐標為:\n"
<< "core_x:" << centroid_out2[0] << endl
<< "core_y:" << centroid_out2[1] << endl
<< "core_z:" << centroid_out2[2] << endl;
//兩種去重心方式的比較
cout << "兩種去質心方式的差值:" << endl;
cout << "delt_x=" << centroid_out1[0] - centroid_out2[0] << endl
<< "delt_y=" << centroid_out1[1] - centroid_out2[1] << endl
<< "delt_z=" << centroid_out1[2] - centroid_out2[2] << endl;
//保存去重心后點云
if (!cloud_out1->empty())
{
pcl::io::savePCDFileBinary("cloud0.pcd", *cloud_out1);
}
return 0;
}
輸出結果:
其實,demeanPointCloud()函式的內部實作就是for回圈
template <typename PointT, typename Scalar> void
pcl::demeanPointCloud (const pcl::PointCloud<PointT> &cloud_in,
const Eigen::Matrix<Scalar, 4, 1> ¢roid,
pcl::PointCloud<PointT> &cloud_out)
{
cloud_out = cloud_in;
// Subtract the centroid from cloud_in
for (size_t i = 0; i < cloud_in.points.size (); ++i)
{
cloud_out[i].x -= static_cast<float> (centroid[0]);
cloud_out[i].y -= static_cast<float> (centroid[1]);
cloud_out[i].z -= static_cast<float> (centroid[2]);
}
}
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/273348.html
標籤:其他
上一篇:zabbix監控的報警機制