ROS-關鍵組件
- 1.Launch檔案
- 2.TF坐標變換
- 3.Qt工具箱
- 4. rviz可視化平臺
- 5.Gazebo物理仿真環境
1.Launch檔案
Launch檔案:通過xml檔案實作多節點的配置和啟動(可自動啟動ROS Master)
示例:
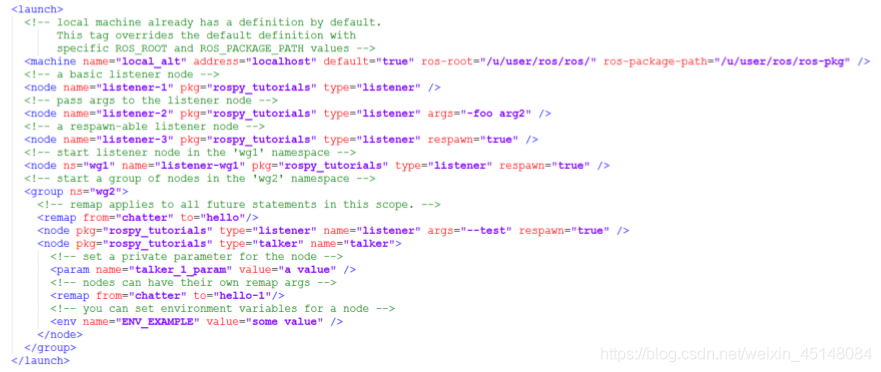

上圖中,< launch >和< node >
< launch >:
launch檔案中的根元素采用< launch >標簽定義;
< node >:啟動節點
< node pkg=“package-name” type=“executable-name” name=“node-name”/ >
(1) pkg:節點所在的功能包名稱;
(2) type:節點的可執行檔案名稱;
(3) name:節點運行時的名稱;
(4) output、respawn、required、ns、args
2.TF坐標變換
管理ROS中的坐標系統
3.Qt工具箱
rqt_console、rqt_graph、rqt_plot、rqt_reconfigure
4. rviz可視化平臺
資料可視化、插件機制
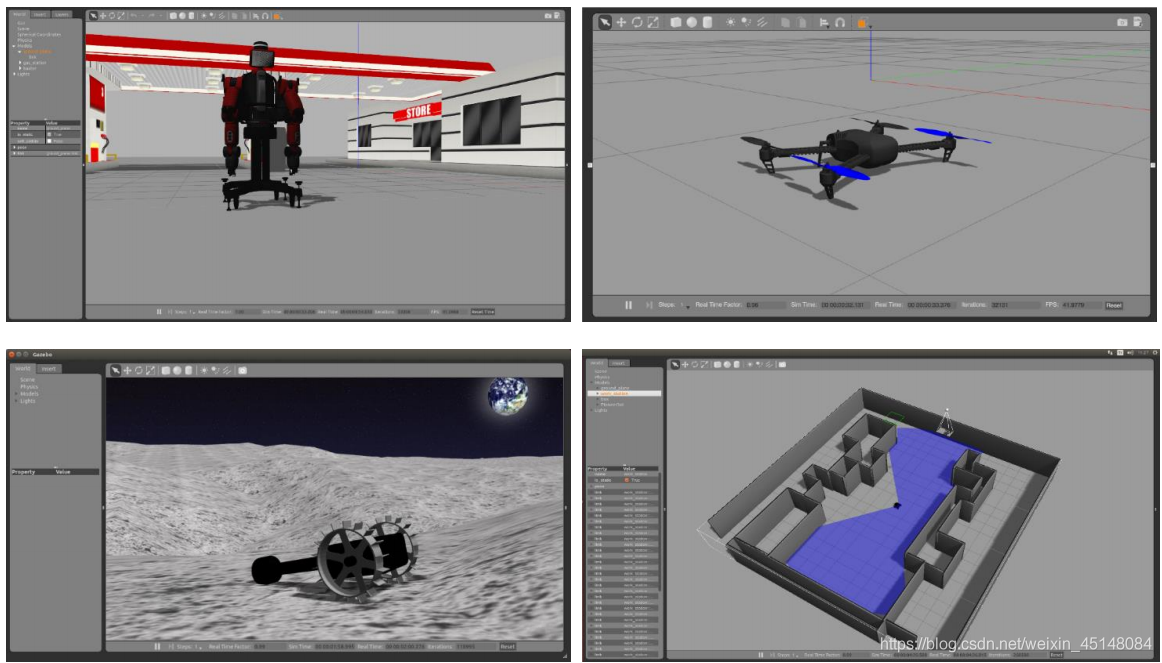
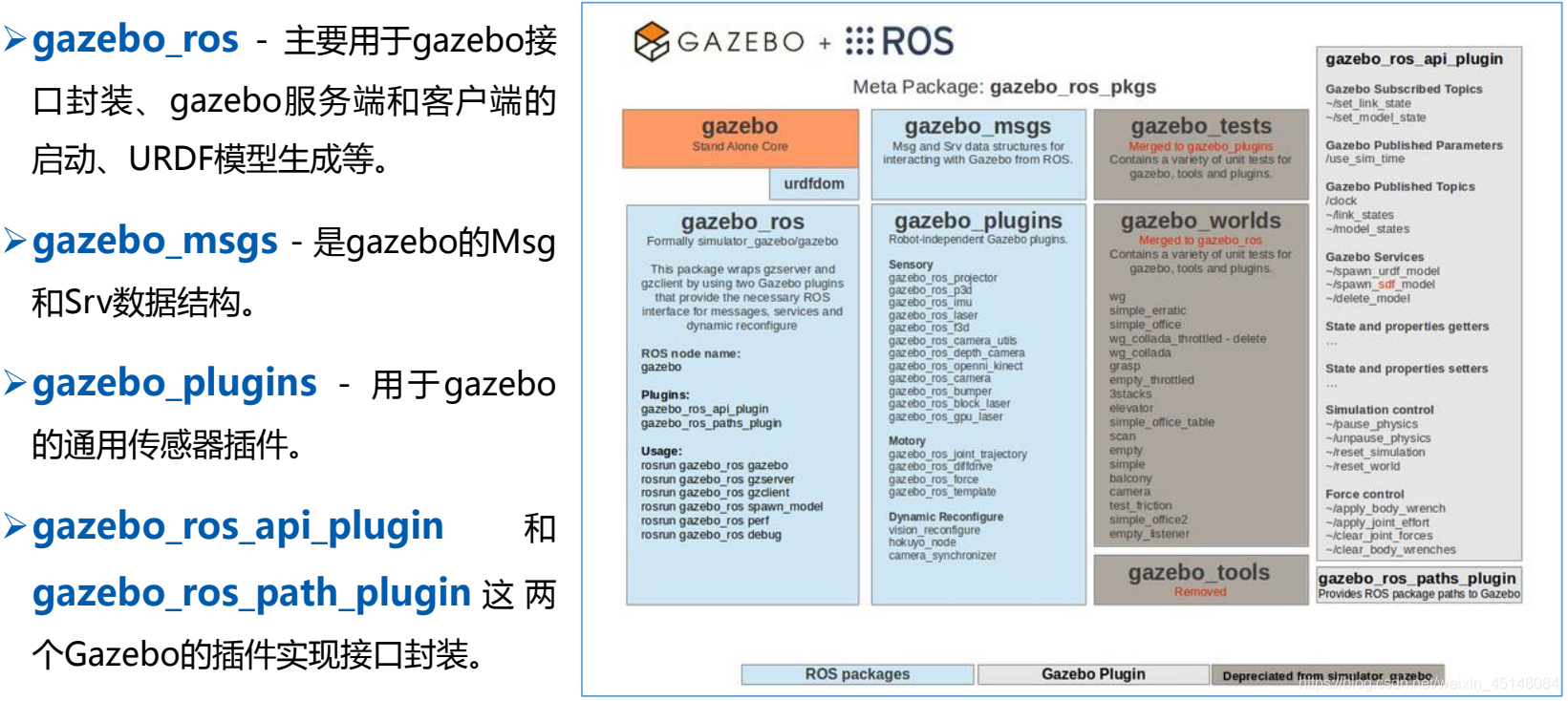
5.Gazebo物理仿真環境
(機器人仿真、功能/演算法驗證)
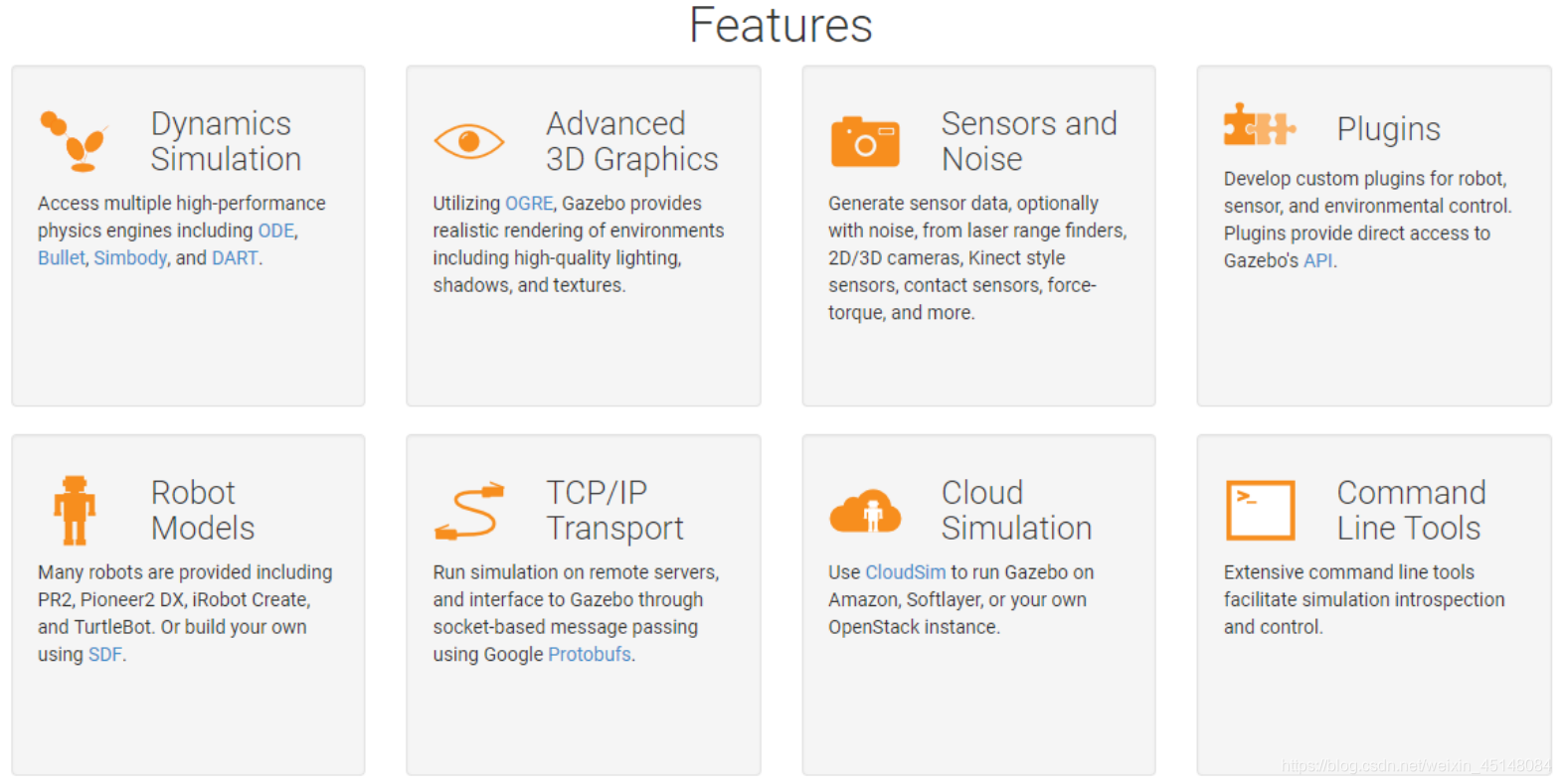
Gazebo是一款功能強大的三維物理仿真平臺:
(1)具備強大的物理引擎
(2)高質量的圖形渲染
(3)方便的編程與圖形介面
(4)開源免費
其典型應用場景包括:
(1)測驗機器人演算法
(2)機器人的設計
(3)現實情景下的回溯測驗
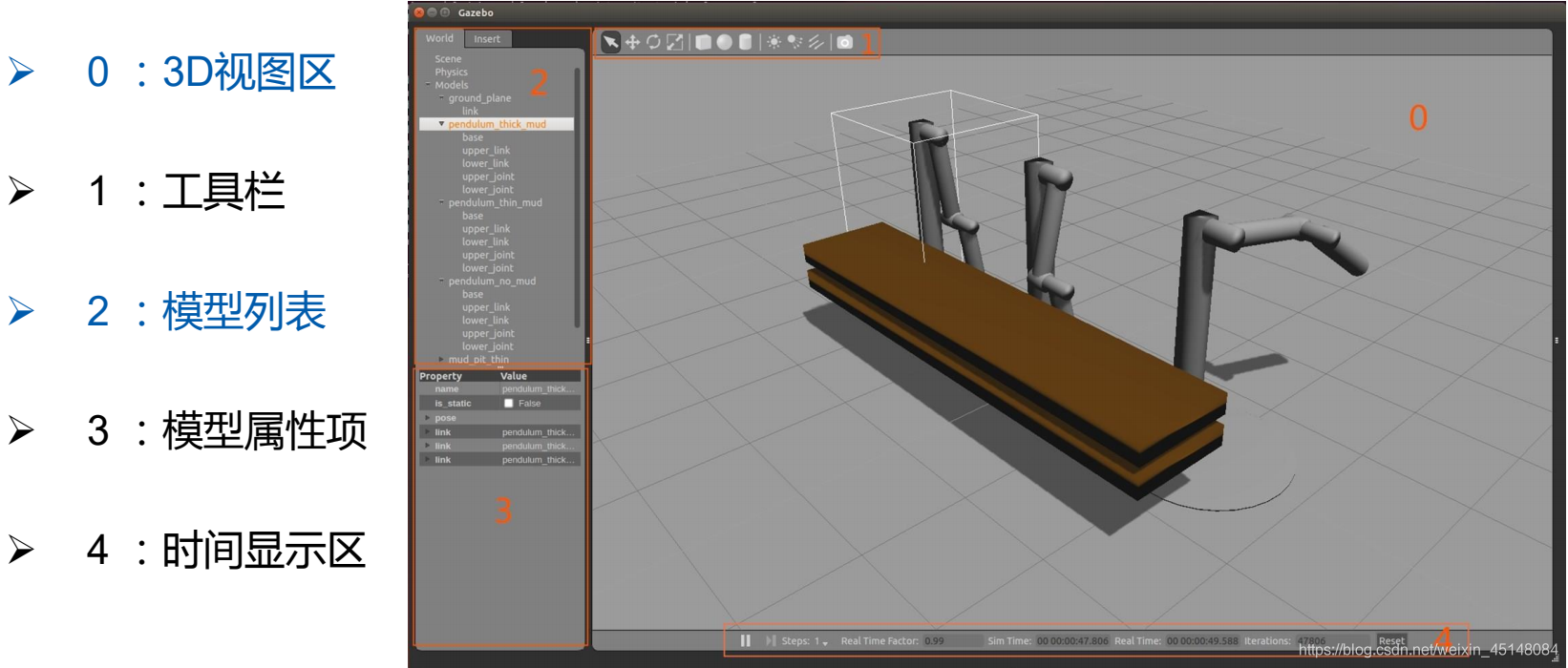
如何使用Gazebo進行仿真
(1)創建仿真環境
(2)配置機器人模型
(3)開始仿真
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/273664.html
標籤:其他
上一篇:shiro總結
下一篇:thinkphp6+騰訊云