文章目錄
- 2.1 視覺感知要素
- 2.2 光和電磁波譜
- 2.3 影像感知和獲取
- 2.4 影像取樣和量化
- 2.4.1 取樣和量化的基本概念
- 2.4.2 數字影像表示
- 2.4.3 空間和灰度解析度
- 2.4.4 影像內插
- 2.5 像素間的一些基本關系
- 2.5.1 相鄰像素
- 2.5.2 鄰接性、連通性、區域和邊界
- 2.5.3 距離度量
- 2.6 數字影像處理中所用數學工具的介紹
- 2.6.1 陣列與矩陣操作
- 2.6.2 影像運算總結
- (1)點運算:
- (2)代數運算:
- (3)邏輯運算:
- (4)幾何運算:
2.1 視覺感知要素
(1) 人的視覺系統構成:眼球、神經系統、大腦的視覺中樞
(2)兩類光感受器:錐狀體(Cones)和桿狀體(rods):
錐狀體視覺稱為白晝視徑訓亮視覺,對顏色十分敏感;
桿狀體視覺稱為暗視徑訓微光視覺,
在低照明水平情況下,視覺由桿狀體執行,在高照明水平情況下,視覺由錐狀體執行,
(3)人的視覺程序:光刺激->視網膜接收->視網膜神經處理->視覺通道->大腦皮層處理->回應
(4)主觀亮度是眼睛入射光強的對數函式,亮度適用范圍是從10-6到104,視覺系統通過改變其整個靈敏度來完成這一較大的變動,這就是亮度適應現象;視覺系統的當前靈敏度級別稱為亮度適應級別,
(5)用于確定人類視覺系統亮度辨別能力的一個著名實驗:光強為I,照射分量為ΔI,ΔIc/I稱為韋伯比(其中ΔIc是在背景照明為I時可辯別照明增量的50%),韋伯比較小意味著可辯別強度較小的百分比變化,表示亮度辨別能力強,反之,意味著要求有較大百分比的強度變化,表示亮度辨別能力差,
2.2 光和電磁波譜
總結:
- 電子伏特越大,電磁波譜頻率越小、波長越大,則在可見光譜中,越接近紅色,
- 沒有顏色的光稱為單色光或無色光,從黑到白的單色光的度量值范圍通常稱為 灰度級,而單色影像常稱為 灰度影像,
2.3 影像感知和獲取
總結:
- 可使用單個傳感器獲取影像;
- 可使用條帶傳感器獲取影像;
- 可使用傳感器陣列獲取影像;
簡單的影像形成模型:f(x,y)=i(x,y)r(x,y),其中i(x,y)的性質取決于照射源,r(x,y)的性質取決于成像物體的特性,
影像獲取即影像的數字化程序,包括掃描、取樣和量化,
2.4 影像取樣和量化
2.4.1 取樣和量化的基本概念
影像的取樣:將空間上連續的影像變換成離散點,對坐標值進行數字化的操作,相當于對位置離散;
影像的量化:將像素灰度轉換成離散的整數值,即對幅值數字化的程序,相當于對亮度離散,
數字影像的質量在很大程度上取決于取樣和量化中所用的樣本數和灰度級:
- 一般來說,取樣間隔越大,所得影像像素數越少,空間解析度越低,質量越差,嚴重時出現馬賽克效應
- 量化等級越多,所得影像層次越豐富,灰度解析度越高,影像質量越好,但資料量大,
2.4.2 數字影像表示
數字影像的原點位于左上角,其中正x軸向下延伸,正y軸向右延伸,假設把連續影像取樣為一個二維陣列f(x,y),該陣列包含有M行和N列,其中(x,y)是離散坐標,設離散灰度級數為L(L=2k),則存盤數字影像所需的位元數b為b=M×N×k,M=N時,b=N×2k,
2.4.3 空間和灰度解析度
- 空間解析度是影像中可辯別的最小細節的度量;
- 灰度解析度是指在灰度級中可分辨的最小變化,
2.4.4 影像內插
內插屬于基本的影像重取樣方法,在放大、收縮、旋轉和幾何校正中有廣泛的應用,第四章會重點介紹,目前可簡單了解到,插值有最近鄰內插、雙線性內插和雙三次內插,其操作越來越復雜,效果也越來越好,
2.5 像素間的一些基本關系
2.5.1 相鄰像素
位于坐標(x,y)處的像素p的4個水平和垂直的相鄰像素,這組像素稱為p的4鄰域,記為 N4( p);
位于坐標(x,y)處的像素p的4個對角相鄰像素,記為ND( p);
N4( p)∪ ND( p); = N8( p),
2.5.2 鄰接性、連通性、區域和邊界
-
鄰接性
4鄰接
8鄰接
m鄰接
(設V={1}) -
連通性
設S是像素集,p、q∈S,如果在S中存在一條從p到q的通路,那么稱p和q在S中是連通的,對于S中的任何像素p,S中連通到該像素集稱為S的連通分量,如果S只有一個連通分量,則集合S稱為連通集,
- 區域
設R1,R2是區域,如果R1∪R2是連通的,稱R1,R2相鄰,不鄰接的區域稱為不連接區域,
- 邊界
區域R中與其補集Rc相鄰的像素集合稱為區域R的邊界,也成為內邊界;
補集Rc中與R相鄰的像素集合,稱為區域R的外邊界
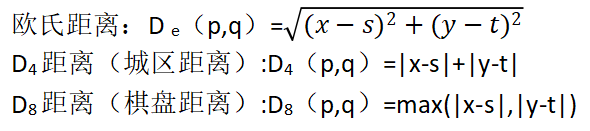
2.5.3 距離度量
2.6 數字影像處理中所用數學工具的介紹
2.6.1 陣列與矩陣操作
區別陣列與矩陣操作,我們假設陣列操作貫穿全書,除非另作說明,
陣列相乘:

2.6.2 影像運算總結
(1)點運算:
對每個像素點的像素值進行變換,包括線性變換和非線性變換,
- 線性變換:輸入影像的灰度級與輸出影像的灰度級呈線性關系,即s=ar+b(r為輸入影像點的灰度值,s為相應輸出點的灰度值)
線性變化運行結果圖
- 典型的非線性變換函式有:對數函式、指數函式、冪函式、閾值函式、多值量化函式、視窗函式等,
I=imread('eight.tif'); %讀取一幅圖片
I = im2double(I); % 轉型別為double
subplot(1,5,1);
imshow(I); % 顯示原影像
title('原影像','fontsize',6);
a = 2; b = -50; % a>1,增加對比度
O = a .* I + b/255;
subplot(1,5,2);
imshow(O);
title('a=2,b=-50,增加對比度','fontsize',6);
a = 0.5; b = -50; % a<1,減小對比度
O = a .* I + b/255;
subplot(1,5,3);
imshow(O);
title('a=0.5,b=-50,減小對比度','fontsize',6);
a = 1; b = 50; % a=1,線性改變亮度
O = a .* I + b/255;
subplot(1,5,4);
imshow(O);
title('a=1,b=50,改變亮度','fontsize',6);
a = -1; b = 300; % a<0, 影像求補
O = a .* I + b/255;
subplot(1,5,5);
imshow(O);
title('a=-1,b=300,影像求補','fontsize',6);
(2)代數運算:
對二幅或多幅影像像素值進行加、減、乘、除,
加法降噪,減法檢測變化,乘法用來屏蔽影像的某些部分,除法校正明暗變化
加法運行結果圖
減法運行結果圖
乘法運行結果圖
除法運行結果圖
(3)邏輯運算:
對二幅二值影像像素進行邏輯與、或、非、異或,
邏輯 與 或 非 異或 運行結果圖
(4)幾何運算:
不改變像素值,而改變像素所在的位置,如平移、鏡像、旋轉、縮小、放大等,
一個幾何運算需要兩個獨立的演算法:
一個演算法來定義空間變換;一個演算法用于灰度級的插值
- 放縮:一般是全比例縮放,如果x方向和y方向縮放比例不同,則影像的比例縮放會改變原始影像像素間的相對位置,產生幾何畸變,
- 旋轉(以影像的中心為原點):
旋轉變換后,影像位置發生變化,解決方法:
- 截去區域外的部分
- 擴大顯示區域的影像范圍以顯示影像的全部
影像旋轉后,可能會出現一些空白點,需要對這些空白點進行灰度級的插值處理,插值方法見2.4.4
關鍵代碼如下:
- 平移:J = imtranslate(I,[200,100]);平移運行結果圖
- 放縮:J = imresize(I,0.5);放縮運行結果圖
- 旋轉:J = imrotate(I,30);旋轉運行結果圖
- 鏡像:
M = [-1,0,0;0,1,0;0,0,1];
t = affine2d(M);
J = imwarp(I,t);
鏡像運行結果圖
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/274491.html
標籤:其他