仿生機器人是指依據仿生學原理,模仿生物結構、運動特性等設計的機電系統,已逐漸在反恐防爆、太空探索、搶險救災等不適合由人來承擔任務的環境中凸顯出良好的應用前景,

根據仿生學的主要研究方法,需要先研究生物原型,將生物原型的特征點進行提取和數學分析,獲取運動資料,建立運動學和動力學計算模型,最后完成機器人的機械結構與控制系統設計,

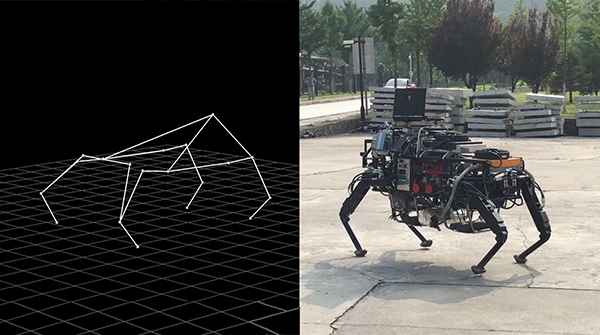
NOKOV度量動作捕捉的采集頻率可達到380Hz,保證采集的運動資料不會失真,利用這些生物原型的特征點資訊,研究者可建立蜥蜴運動的計算模型,從而為仿生機器人設計制造提供理論基礎,
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/275343.html
標籤:其他