2021 年第十一屆 MathorCup 高校數學建模挑戰賽A題分析
- 題目:自動駕駛中的車輛調頭問題
- 分析(更新中)
- 1
- 2
- 3(更新中)
題目:自動駕駛中的車輛調頭問題
自動駕駛是近年人工智能應用的熱門研究領域之一,其中調頭是自動
駕駛中一個非常實際又很有趣的場景,假設無人車為四輪乘用車,采用前
輪轉向后輪驅動;車身可認為是一個矩形,車長 5 米,車寬 2 米,軸距 2.8
米;方向盤最大轉角 470°,方向盤與前輪轉角的傳動比為 16:1(方向盤
每轉動 16°,前輪轉動 1°),方向盤最大轉速為 400°/s;最大油門加速
度 3m/s2
,極限剎車加速度-5m/s2,
無人車的軌跡,指的是一條含有位置和時間等資訊的曲線,它由一列
軌跡點構成,各個軌跡點中應包含位置坐標、方向角、曲率、曲率變化率、
速度、加速度及運動到此點時的時間等資訊,這里軌跡指的是車身中某一
特定點的軌跡,即控制點,控制點是事先選定的,通常位于無人車車身對
稱軸(車身可以近似認為是左右軸對稱的)上的一點,在行駛時,控制點
的位置會與軌跡點相重合,控制點處的速度方向將與軌跡點的方向角一致,
由于無人車的車輛動力學性質和安全性要求,軌跡必須滿足以下條件:
(1)任何點的加速度不得高于最大油門加速度,不得低于極限剎車減
速度;
(2)無人車朝向和方向盤轉角都不能突變,軌跡線必須是連續、且切
線方向連續,當無人車不是靜止時,曲率也必須連續(靜止時可以原地打
方向,非靜止時不能);
(3)軌跡線的最大曲率應盡量不高于 0.205,禁止高于 0.21;
2 (4)按軌跡行駛時,在調頭完成之前,無人車車身任何點不得與任何
障礙物或者掉頭區域邊界發生碰撞,且與障礙物至少保留一個最小安全距
離,一般不小于 30cm,
無人車調頭軌跡在保證上述條件之外也應具備盡可能舒適的駕乘體感,
以及具備盡可能高的通行效率,同時出于規范駕駛的考慮,盡量減少不必
要的壓車道線行駛,
請參賽者按照下面問題中簡化版的無人車調頭場景和附件資料,建立
無人車安全快速調頭的數學模型,設計無人車調頭軌跡的計算方法,在輸
入外部道路和障礙物資訊后,計算出合理可行的無人車軌跡,同時,由于
附近障礙物可能由于視野問題被遮擋,導致調頭中周圍環境資訊發生變化,
軌跡應當是可以實時更新的,附件資料檔案中的邊界線均表示為折線點列,
按坐標點從上到下的順序連接形成;所有障礙物均以多邊形表示,其中的
點均按逆時針順序排列,路況簡圖見資料檔案,請你們的參賽隊完成以下
問題:
問題 1:如圖 1 所示場景,無人車(用橙色矩形表示)正在最左側車
道準備調頭,存在三個對向車道,附件資料檔案中,掉頭區域邊界以紅色
邊框 A 表示,兩條對向車道線以 B、C 表示(均為路面上的虛線),中間的
隔離障礙物以 D 表示,無人車起始位置已經在附件資料檔案中給出,當無
人車身觸碰到對向的掉頭區域邊界(圖 1 中綠色部分)時,認為調頭完成,
請闡述控制點位置,解釋其理由;基于此建立無人車調頭的數學模型,并
給出一個合理可行的演算法設計,給出調頭軌跡,
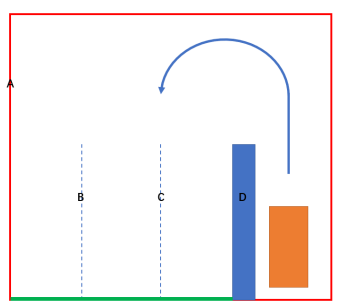
圖 1: 無人車調頭場景 1
問題 2:當掉頭區域狹窄時,判斷什么樣的場景下無人車能夠在不倒
車的情況下完成調頭,什么情況需要至少一次倒車(如圖 2 場景 2,藍色
箭頭表示向前,紅色箭頭表示倒車)才能通過,建立相應的無人車調頭的
數學模型,給出合理的演算法設計,并給出仿真結果,
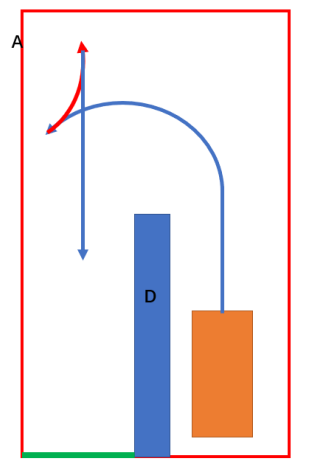
圖 2: 無人車調頭場景 2
4
問題 3:如圖 3 場景,如果道路上還存在其它靜止障礙物(附件資料
檔案中以 F 和 G 表示),當僅存在 F、僅存在 G、或二者都存在時,建立相
應的無人車調頭的數學模型,給出合理的演算法設計,并給出調頭軌跡,你 的演算法應明確如何進行避障?
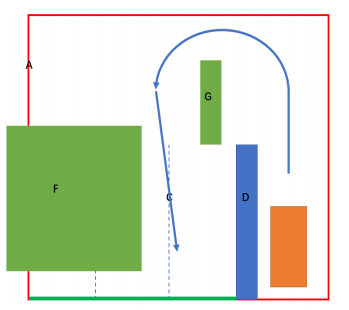
圖 3: 無人車調頭場景 3
問題 4:按交規規定,如果道路上存在人行橫道即斑馬線,其所占區
域在附件資料檔案中以 E 表示,則無人車需要盡可能在不壓人行橫道的情 況下通過,如果無法做到,則需要越過(后輪越過)人行橫道后再開始調
頭,禁止騎人行橫道調頭(如圖 4 場景 4 所示),其中標識“√”的為可行
通行方式,標識“×”為騎人行道調頭方式,建立相應的無人車調頭的數 學模型,給出合理的演算法設計和相應的調頭軌跡;當斑馬線和障礙物同時 存在時(如圖 5 場景 5 所示),你的模型和演算法如何同時滿足交規并進行避 障繞行?
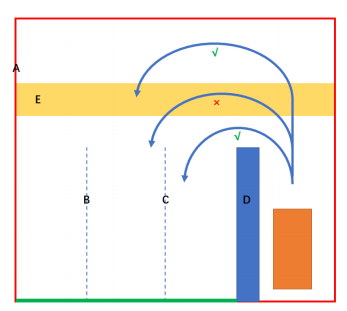
圖 4: 無人車調頭場景 4
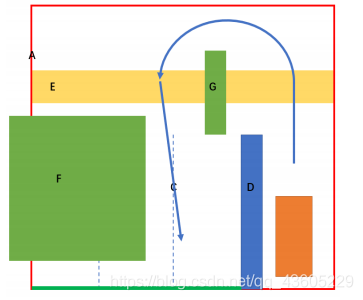
圖 5: 無人車調頭場景 5
問題 5:無人車在實際路況行駛中進行調頭時,道路中的障礙物通常
是處于移動狀態,如對向來車等,針對圖 3 和圖 5 的兩種場景,假設圖中 標識的障礙物位置為無人車處在起始時刻的初始位置,障礙物以一定的速
度移動,假設只考慮與道路平行方向移動,請建立更一般的無人車調頭軌
跡規劃模型并給出相應演算法設計和無人車調頭策略,給出仿真結果,
問題 6:為保證無人駕駛的安全性,無人車的軌跡規劃演算法必須擁有
盡可能高的求解成功率(應傾向使用更收斂更穩定,失敗率更低的計算方 法)同時為了能對路況進行快速反應,需要以盡可能高的頻率進行計算(計
算復雜度盡量低),你的演算法如何在求解成功率和求解耗時這兩方面優化?
分析(更新中)
數學建模主要是讓大家構建自己的模型,只要能解決問題的模型就是好模型,無標準答案,我個人的分析程序大致如下文,僅個人觀點不一定是正確的,不說太多怕限制了大家的思維哈哈哈
1
首先對于第一題,可以根據自身練習科目二時的場景,在掉頭時先打死方向盤(這個程序需要考慮車輪變化方向的時間,及這段極短時間內的位移),打死方向盤后這一段近似圓比較好算,當車輛與車道垂直時,改變方向盤一定角度,再當車身與車道夾角45度時再改變一次方向盤,最后一段時間再以一定速率改變方向盤使車直行
2
第二題同理但是要注意這題與第一題的目的不一樣,需要把題目中給出的一個定量改為變數,控制它找到邊界點,就很好分析什么時候需要倒車了,那這個變數是啥呢?可以是車速可以是車道距離也可以是障礙物位置,這主要看你從那個角度分析,
3(更新中)
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/276974.html
標籤:其他
上一篇:shell腳本經驗