數字影像處理——第3章 灰度變換與空間濾波
文章目錄
- 數字影像處理——第3章 灰度變換與空間濾波
- 寫在前面
- 3.1 灰度變換
- 3.1.1 基本的灰度變換函式
- 影像反轉
- 對數變換
- 伽瑪變換
- 分段線性變換函式--三種
- 3.1.2 直方圖處理
- 直方圖均衡化(Histogram Equalization)
- 直方圖規定化(Histogram Specification)
- 區域直方圖處理
- 3.2空間濾波
- 3.2.1 平滑空間濾波器
- 3.2.2 銳化空間濾波器
- 使用一階微分進行影像銳化——梯度
- 使用二階微分進行影像銳化——拉普拉斯算子
- 總結
寫在前面
影像在成像、采集、傳輸、處理等程序中不可避免的會造成某些降質,說白了就是影像可能會不清晰,采集中未突出所需部分,例如有噪音、散斑、運動模糊等等,所以我們要進行影像增強,達到我們想要的,最清晰的效果,影像增強是指對影像的某些特征如邊緣、輪廓、對比度等進行強調,今天所學的灰度變換和空間濾波正是影像增強的兩種方法,
同時,灰度變換和空間濾波都是在空間域進行的,也就是說直接在影像的像素上進行操作,
3.1 灰度變換
灰度變換主要針對獨立的像素點進行處理,通過改變原始影像資料所占據的灰度范圍而使影像在視覺上得到良好的改變,所以他屬于點處理,
3.1.1 基本的灰度變換函式
r表示原圖的像素值,s表示處理后的像素值,下述的實驗均采用簡單的opencv函式即可實作,
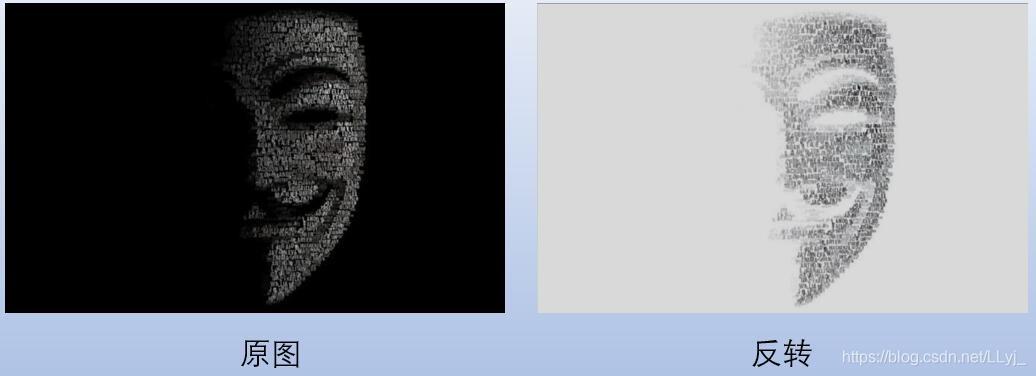
影像反轉
使用影像反轉,可得到灰度級范圍為[0,L-1]的一幅影像的反轉影像,該反轉影像由下式給出:
s
=
L
?
1
?
r
s=L-1-r
s=L?1?r
其中,L表示原圖中最大的像素值,使用這種變換可以反轉一幅影像的灰度級,從而去突出影像暗色區域中的白色或灰色細節,特別是當黑色面積在尺寸上占主導地位時,如下圖所示
對數變換
對數變換公式如下所示
s
=
c×log
?
(
1
+
r
)
s=\operatorname{c×log}(1+r)
s=c×log(1+r)
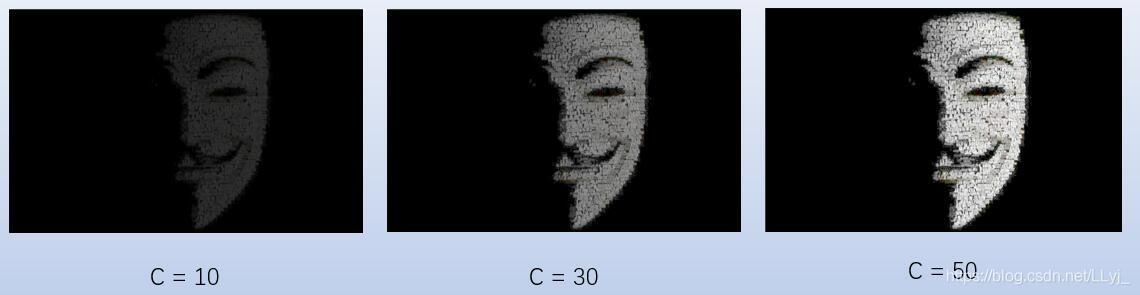
其中c是常數,并且假設r大于等于0,此處1的作用是防止log指數大于0,對數變換可以將輸入中范圍較窄的低灰度值映射為輸出中范圍較寬的灰度值,或將輸入中范圍較寬的灰度值映射為輸出中范圍較窄的灰度值,我們使用對數變換可以用來擴展影像中的暗像素值,同時壓縮更高灰度的值,反對數函式作用剛好相反,
伽瑪變換
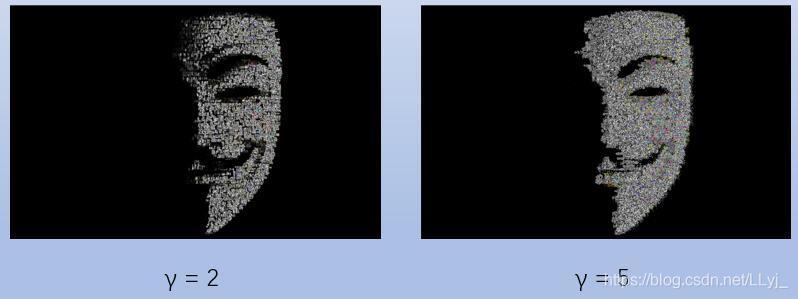
伽瑪變換冪律變換,公式如下:
s
=
c
r
γ
—
—
其
中
γ
和
c
為
正
常
數
s=c r^{\gamma}——其中 \gamma和c為正常數
s=crγ——其中γ和c為正常數
當γ>1,且越來越大時會拉伸影像中灰度級較高的區域,壓碩訓度級較低的部分,有圖可知,γ越大,灰度就越密集,圖中眼睛眉毛等區域可看出拉伸的效果,
分段線性變換函式–三種
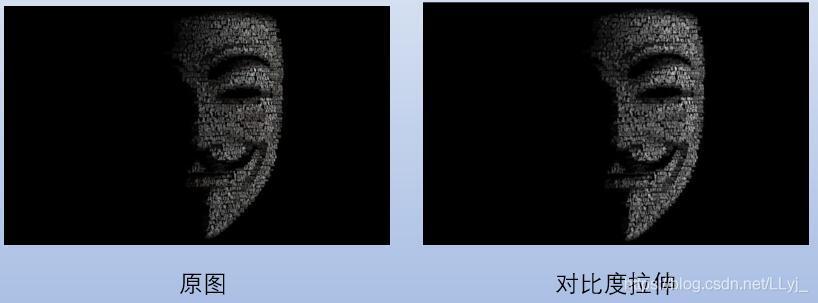
(1)對比度拉伸,影像對比度指的是一幅影像中明暗區域最亮的白和最暗的黑之間不同亮度層級的測量,即指一幅影像灰度反差的大小,一般來說對比度越大,影像越清晰醒目,色彩也越鮮明艷麗;而對比度小,則會讓整個畫面都灰蒙蒙的,采用這里分析特殊情況,就是g(x,y) = 255 / (B - A) ×[f(x,y) - A],其中,A = min[f(x,y)],最小灰度級;B = max[f(x,y)],最大灰度級;f(x,y)為輸入影像,g(x,y)為輸出影像,如果當灰度影像中最小值A=0,最大值B=255,則影像沒有什么改變:
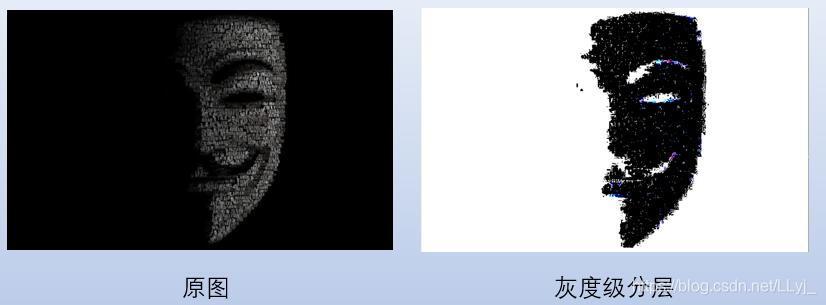
(2)灰度級分層,灰度級分層主要突出影像中特定灰度范圍的亮度,這類方法中大多數是兩種基本方法的變形,
①將感興趣范圍內的所有灰度值顯示為一個值(如白),其他值顯示為其他值(如黑)——即二值映射
②第二種方法是使感興趣范圍的灰度變亮(或變暗),而保持其他灰度級不變——即區域映射
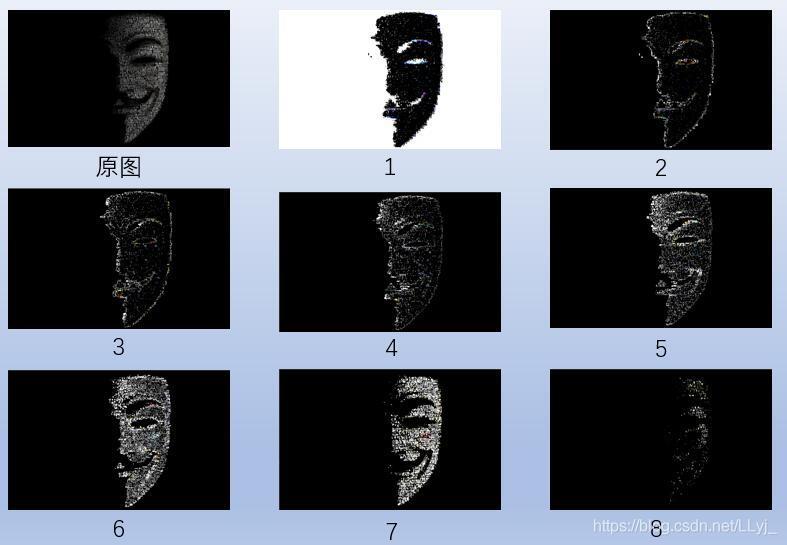
(3)位元分割,在灰度圖中,像素值的范圍為[0, 255],即共有256級灰度,在計算機中,我們使用8位元數來表示每一個像素值,因此可以提取出不同位元層面的灰度圖,位元層面分層可用于圖片壓縮,如使用高四位位元層表示原有的八層位元平面,
3.1.2 直方圖處理
影像直方圖反映了影像像素分布的統計特性,是影像處理中簡單有效的工具,在直方圖中,暗影像集中分布在灰度級的低端;亮影像集中分布在灰度級的高端,低對比度影像具有較窄的直方圖,且集中于灰度級的中部;高對比度影像的直方圖分量則覆寫了很寬的灰度級范圍,一般灰度圖才進行直方圖的展示,
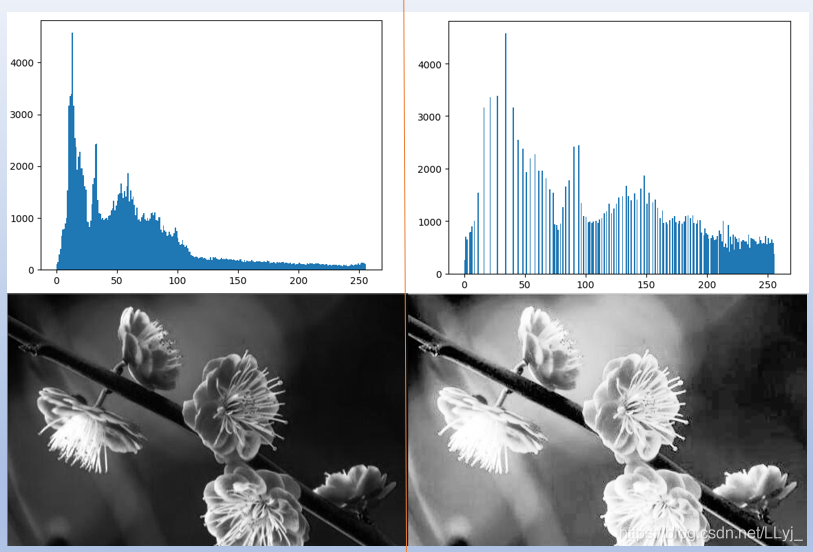
直方圖均衡化(Histogram Equalization)
均衡化的基本原理:是把原始圖的直方圖變換為均勻分布的形式,這樣就增加了像素灰度值的動態范圍從而可達到增強影像整體對比度的效果,
均衡化步驟:
- 統計影像中每個灰度級出現的次數,計算影像中每個灰度級出現的概率;
- 根據變換公式得到直方圖均衡化的變換函式;
- 根據變換函式映射到每個像素點;
- 輸出映射后的影像;
'''
直方圖的均衡化,可實作上述效果
'''
import cv2
from matplotlib import pyplot as plt
import numpy as np
image = cv2.imread(" ");# 讀取圖片,填入圖片地址
gray = cv2.cvtColor(image,cv2.COLOR_BGR2GRAY)# 將圖片轉成灰度圖
plt.hist(gray.ravel(), 256, [0, 256])# 畫出灰度圖的直方圖
plt.show()
equ = cv2.equalizeHist(gray)# 均衡化
plt.hist(equ.ravel(), 256, [0, 256])# 畫出均衡化后的直方圖
plt.show()
cv2.imshow('equalization', np.hstack((gray, equ))) # 并排顯示原灰度圖和均衡化后的灰度圖
cv2.waitKey(0)
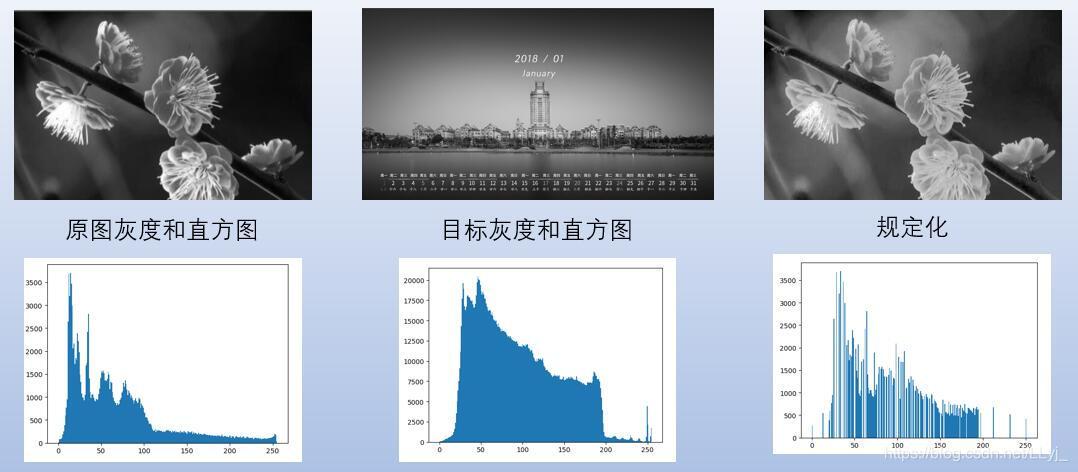
直方圖規定化(Histogram Specification)
直方圖規定化,也叫做直方圖匹配,其原理為有目的的增強某個灰度區間的影像,即能夠人為地修正直方圖的形狀,使之與期望的影像相匹配,基本步驟如下:
- 計算原影像的累積直方圖
- 計算規定直方圖的累積直方圖
- 計算兩累積直方圖的差值的絕對值
- 根據累積直方圖差值建立灰度級的映射
直方圖規定化原理是對兩個直方圖都做均衡化,變成相同的歸一化的均勻直方圖,以此均勻直方圖起到媒介作用,再對參考影像做均衡化的逆運算即可,直方圖均衡化是直方圖規定化的橋梁,如下圖實驗所示,代碼參照這篇博客,
區域直方圖處理
在某種意義上,像素被基于整幅影像的灰度分布的變換函式修改,雖然這種全域方法適用于整個影像的增強,但存在這樣的情況,增強影像中小區域的細節也是需要的,這些區域中,一些像素的影響在全域變換的計算中可能被忽略了,因為全域變換沒有必要保證期望的區域增強,解決方法是以影像中每個像素的鄰域中的灰度分布為基礎設計變換函式,
3.2空間濾波
空間濾波就是直接在灰度值上,做一些濾波操作,濾波是影像處理中常用的技術,可以銳化影像、模糊影像、去除噪聲、增強影像等等,簡單來說,就是用一個n×n的矩陣扣在影像上,用模板中每一個元素對扣住的范圍中對應的像素進行數學操作,將產生的數值賦給模板中心點所對應,下圖直觀感受下:
3.2.1 平滑空間濾波器
平滑濾波用于模糊處理和降低噪聲,模糊處理常用于預處理任務中,如在目標提取之前去除影像中的一些瑣碎細節,也就是得到感興趣的區域的粗略表示,將次要的的元素與背景融合,使得主要的元素變得易于檢測,通過線性或非線性平滑濾波也可降低噪聲,
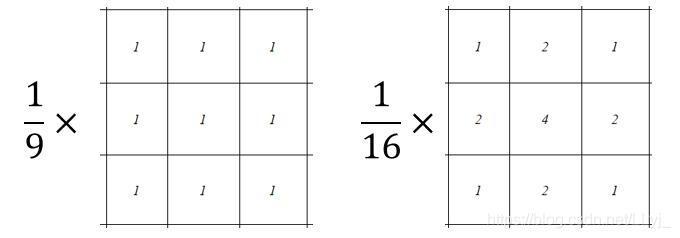
均值濾波器是較簡單的平滑濾波器,它使用濾波器模板確定的鄰域內像素的平均值來代替影像中每個像素的值,這種處理降低了影像中尖銳的變換同時可以消除典型的隨機噪聲引起的劇烈變化,對于下圖的3×3平滑濾波器,從它的代入式我們就可以清晰的看出他的作用:
R
=
1
9
∑
i
=
1
9
z
i
R=\frac{1}{9} \sum_{i=1}^{9} z_{i}
R=91?i=1∑9?zi?
R是由模板定義的3×3鄰域內像素灰度的平均值,下圖片則可更加直觀的看出上述公式:其中前面的分數分母代表著9個像素值之和,
上述說到平滑空間濾波器能夠模糊處理降低噪聲,那就試驗下,首先給圖片加上噪聲,然后再用5×5的濾波器進行處理,得到的結果如下:

代碼如下,畢竟一鍵運行的東西誰都喜歡
"""
均值濾波
"""
import numpy as np
import cv2
# 定義函式,生成噪聲
def salt_pepperNoise(src):
dst = src.copy()
num = 1000 # 噪聲點個數
ndim = np.ndim(src)
row, col = np.shape(src)[0:2]
for i in range(num):
x = np.random.randint(0, row) # 隨機生成噪聲點位置
y = np.random.randint(0, col)
indicator = np.random.randint(0, 2) # 生成亂數0和1,決定是椒噪聲還是鹽噪聲
# 灰度影像
if ndim == 2:
if indicator == 0:
dst[x, y] = 0
else:
dst[x, y] = 255
# 彩色影像
elif ndim == 3:
if indicator == 0:
dst[x, y, :] = 0
else:
dst[x, y, :] = 255
return dst
if __name__ == '__main__':
img = cv2.imread(' ')# 填寫自己圖片路徑
gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
# 生成椒鹽圖
saltPimg = salt_pepperNoise(gray)
cv2.imshow('saltPepper', saltPimg)
# 均值濾波,使用cv2.medianBlur函式
MeanFimg = cv2.medianBlur(saltPimg, 5)
cv2.imshow('MeanFilter', MeanFimg)
cv2.waitKey(0)
同樣,上述操作使用cv2.medianBlur函式完成,也可以完成高斯濾波、雙邊濾波,使用的函式分別為cv2.GaussianBlur()、cv2.bilateralFilter(),
3.2.2 銳化空間濾波器
平滑空間濾波器是用來平滑影像和抑制噪聲的;而銳化空間濾波器恰恰相反,主要用來增強影像的突變資訊,影像的細節和邊緣資訊,平滑濾波器主要是使用鄰域的均值(或者中值)來代替模板中心的像素,消弱和鄰域間的差別,以達到平滑影像和抑制噪聲的目的;相反,銳化濾波器則使用鄰域的微分作為算子,增大鄰域間像素的差值,使影像的突變部分變的更加明顯,
使用一階微分進行影像銳化——梯度
一維函式f(x)的一階微分的基本定義是差值:
?
f
?
x
=
f
(
x
+
1
)
?
f
(
x
)
\frac{\partial f}{\partial x}=f(x+1)-f(x)
?x?f?=f(x+1)?f(x)
影像處理中的一階微分是用梯度幅值來實作的,梯度也就是(x,y)處f的最大變換率的方向,向量▽f的幅值表示為M(x,y),即
M
(
x
,
y
)
=
mag
?
(
?
f
)
=
g
x
2
+
g
y
2
M(x, y)=\operatorname{mag}(\nabla f)=\sqrt{g_{x}^{2}+g_{y}^{2}}
M(x,y)=mag(?f)=gx2?+gy2?
?
通常我們在實作中,使用絕對值來近似平方和平方根操作更適合于計算:
M
(
x
,
y
)
≈
∣
g
x
∣
+
∣
g
y
∣
M(x, y) \approx\left|g_{x}\right|+\left|g_{y}\right|
M(x,y)≈∣gx?∣+∣gy?∣
使用sobel算子對圖片進行邊緣檢測,突出邊緣和細節資訊,sobel算子從不同方向上去檢測梯度的變化,因此sobel算子在邊緣檢測上起著重要的作用,如下圖所示:

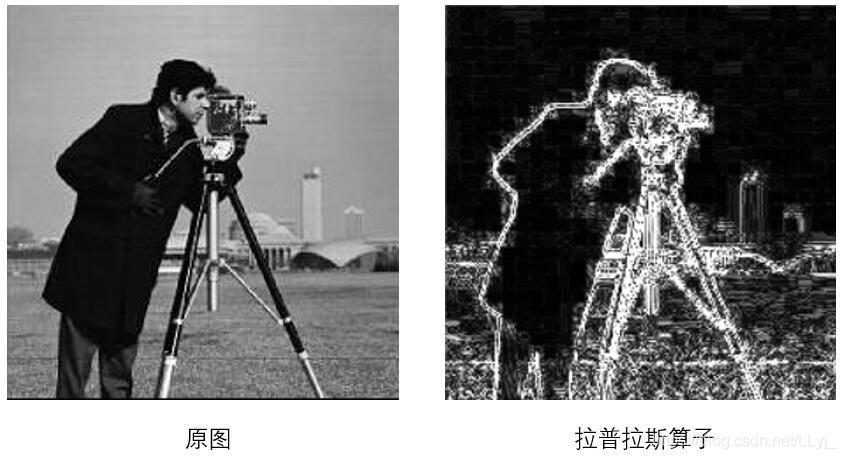
使用二階微分進行影像銳化——拉普拉斯算子
首先一個二維影像函式 f(x,y) 的拉普拉斯算子定義為:
?
2
f
=
?
2
f
?
x
2
+
?
2
f
?
y
2
\nabla^{2} f=\frac{\partial^{2} f}{\partial x^{2}}+\frac{\partial^{2} f}{\partial y^{2}}
?2f=?x2?2f?+?y2?2f?
二階微分定義為如下差分:
?
2
f
?
x
2
=
f
(
x
+
1
)
+
f
(
x
?
1
)
?
2
f
(
x
)
?
2
f
?
y
2
=
f
(
y
+
1
)
+
f
(
y
?
1
)
?
2
f
(
y
)
\frac{\partial^{2} f}{\partial x^{2}}=f(x+1)+f(x-1)-2 f(x)\\ \frac{\partial^{2} f}{\partial y^{2}}=f(y+1)+f(y-1)-2 f(y)
?x2?2f?=f(x+1)+f(x?1)?2f(x)?y2?2f?=f(y+1)+f(y?1)?2f(y)
結合上述三個公式,可以得出離散拉普拉斯算子是:
?
2
f
(
x
,
y
)
=
f
(
x
+
1
,
y
)
+
f
(
x
?
1
,
y
)
+
f
(
x
,
y
+
1
)
+
f
(
x
,
y
?
1
)
?
4
f
(
x
,
y
)
\nabla^{2} \mathrm{f}(\mathrm{x}, \mathrm{y})=\mathrm{f}(\mathrm{x}+1, \mathrm{y})+\mathrm{f}(\mathrm{x}-1, \mathrm{y})+\mathrm{f}(\mathrm{x}, \mathrm{y}+1)+\mathrm{f}(\mathrm{x}, \mathrm{y}-1)-4 \mathrm{f}(\mathrm{x}, \mathrm{y})
?2f(x,y)=f(x+1,y)+f(x?1,y)+f(x,y+1)+f(x,y?1)?4f(x,y)
所以說拉普拉斯算子可以用來對圖片進行邊緣檢測,也可以由下圖直觀感受,使用cv2.Laplacian函式:
總結
本章學習的灰度變換和空間濾波都是影像增強的一種手段,且都是在空間域中操作的,空間域處理主要分為灰度變換與空間濾波兩類,灰度變換在影像的單個像素上操作,主要以對比度和閾值處理為目的,空間濾波涉及改善性能的操作,如通過影像中每一個像素的領域處理來銳化影像,
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/277657.html
標籤:其他