燒錄Py-apple Dynamics
- 1 前言
- 2 采用 Py-apple Dynamics Dev Tool 燒錄
- 3 采用 UpyCraft 燒錄
1 前言
在完成了硬體的準備和開發環境的配置之后,我們就可以燒錄Py-apple Dynamics的開源代碼到控制器中,進而完成四足機器人的所有軟體配置,
燒錄的方法主要由2,一個是采用 Py-apple Dynamics Dev Tool 燒錄,而另一個方法則較為原始,直接通過前面提到的 UpyCraft 軟體燒錄,
2 采用 Py-apple Dynamics Dev Tool 燒錄
Py-apple Dynamics Dev Tool 是由燈哥開發的,可以一站式完成快速配置菠蘿狗系列四足機器人的軟體,界面如下:
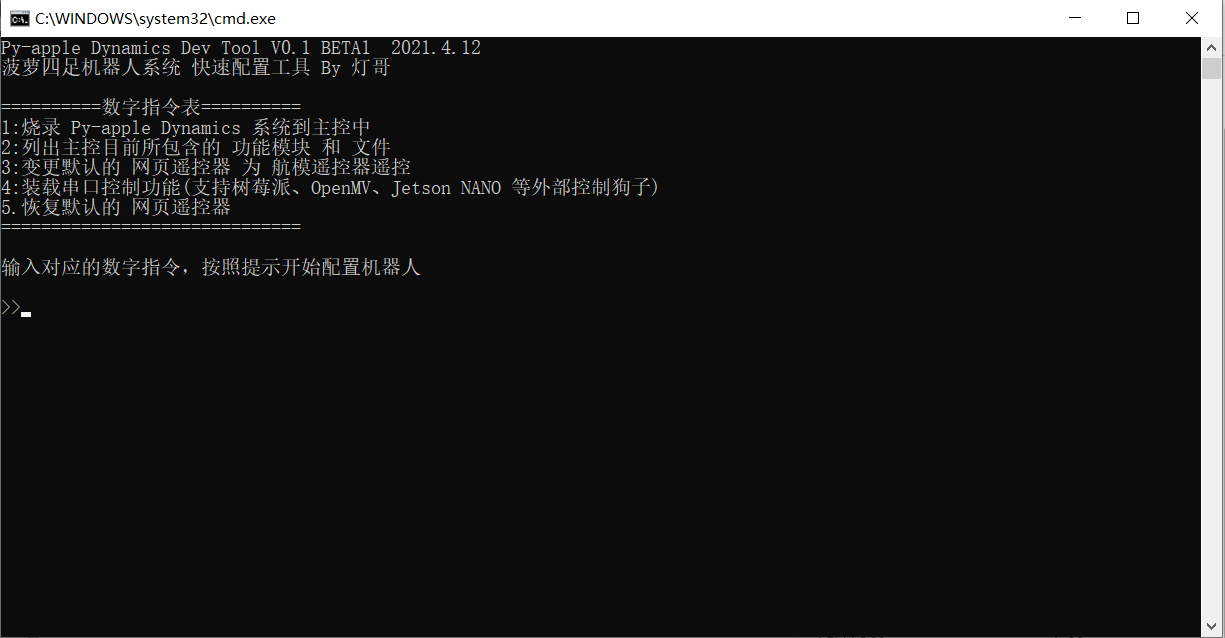
只需要輸入對應的數字,按照提示,就可以完成四足機器人的前期MicroPython環境配置和軟體燒錄,點擊下載 Py-apple Dynamics Dev Tool
要完成燒錄,下載解壓檔案包,接著點擊檔案包其中的 Py-apple Dynamics Dev Tool V0.1 BETA.bat ,然后輸入數字1
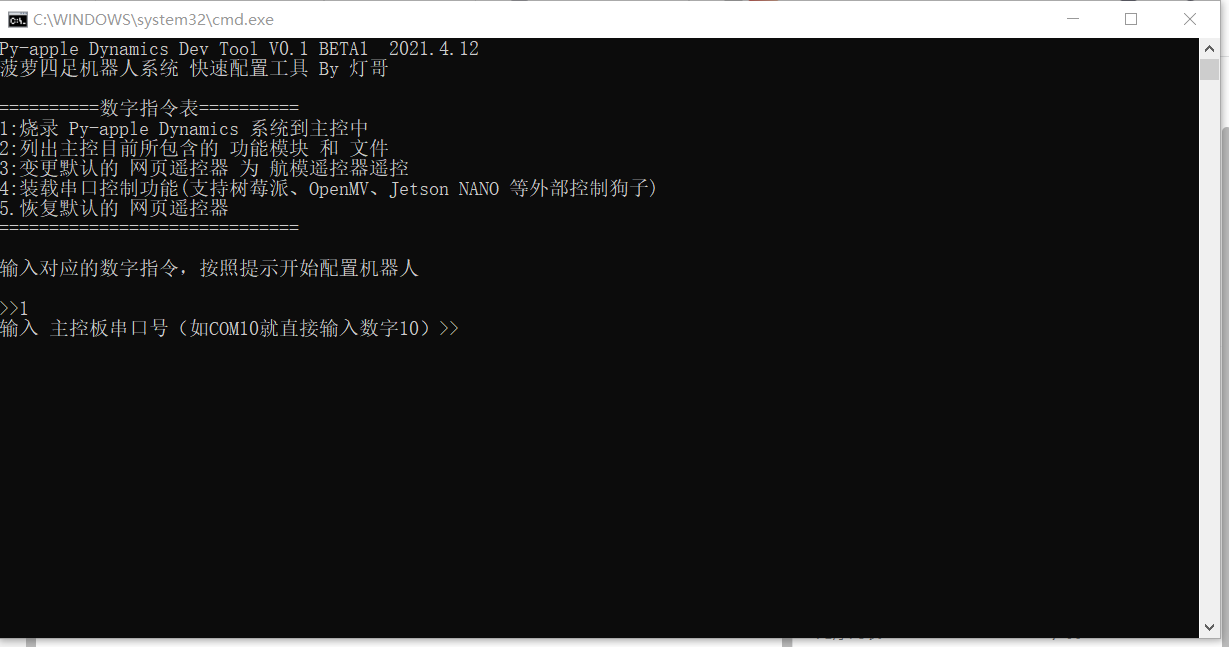
輸入完數字之后,接下來你要輸入你的控制板的串口號,控制板串口號可以在設備管理器中進行查看,查看完成后,輸入對應數字即可,
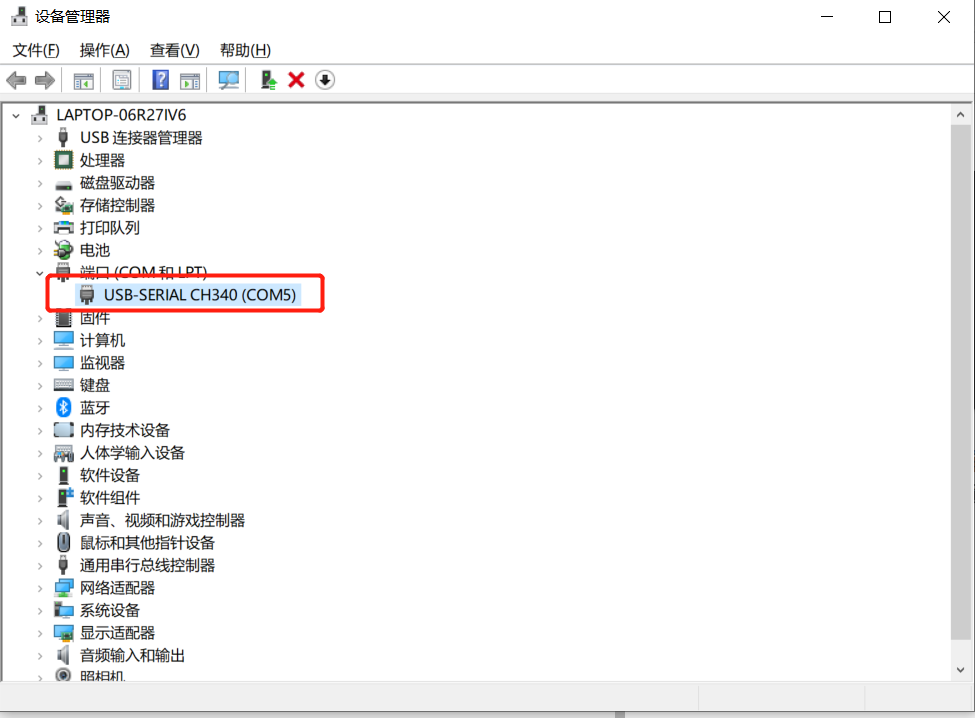
在這里,串口號為 COM5 ,因此,在控制臺中輸入 5,然后,根據提示,輸入四足機器人的自由度數目,比如,當你的機械結構為8自由度時,輸入8;12自由度時,輸入12,(目前該軟體暫時只支持8自由度)
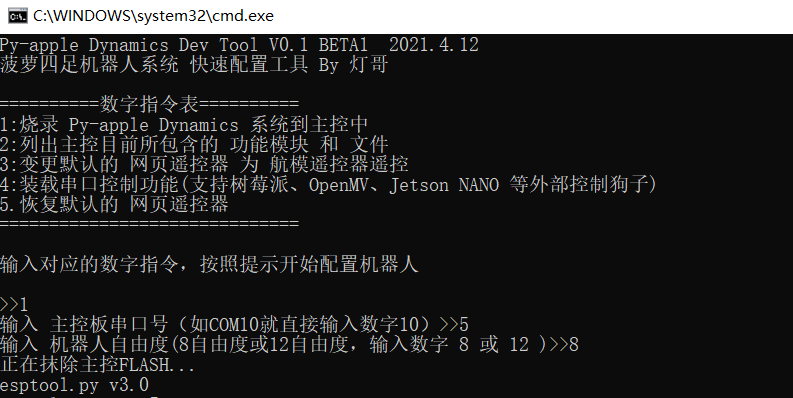
完成輸入后,軟體自動抹除FLASH,燒錄四足機器人 MicroPython 編程環境,并且燒錄四足機器狗程式檔案,燒錄完成后,顯示如下:
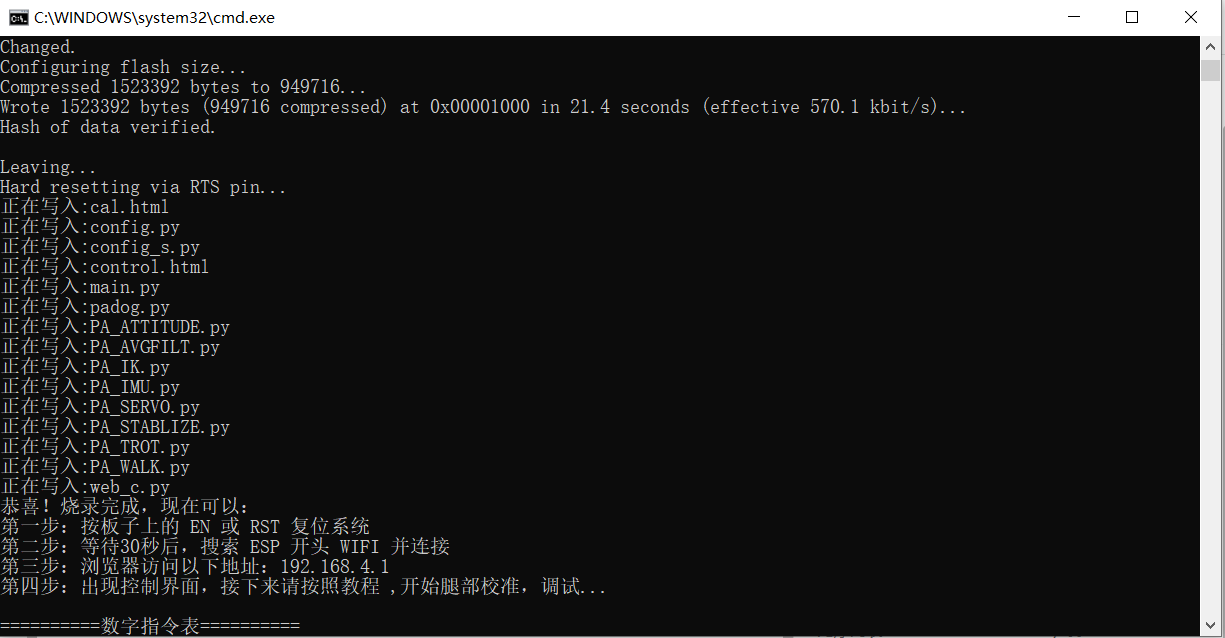
完成燒錄后,按動四足機器狗控制板上的RST按鈕(直插板子)或者是EN按鈕(集成板子),復位板子,等待30S后,可以用電腦/手機搜索到ESP開頭的WIFi(你搜索到的WIFI后綴不一定和我一樣是6898E9,每個ESP板子都會有獨立的后綴編號),

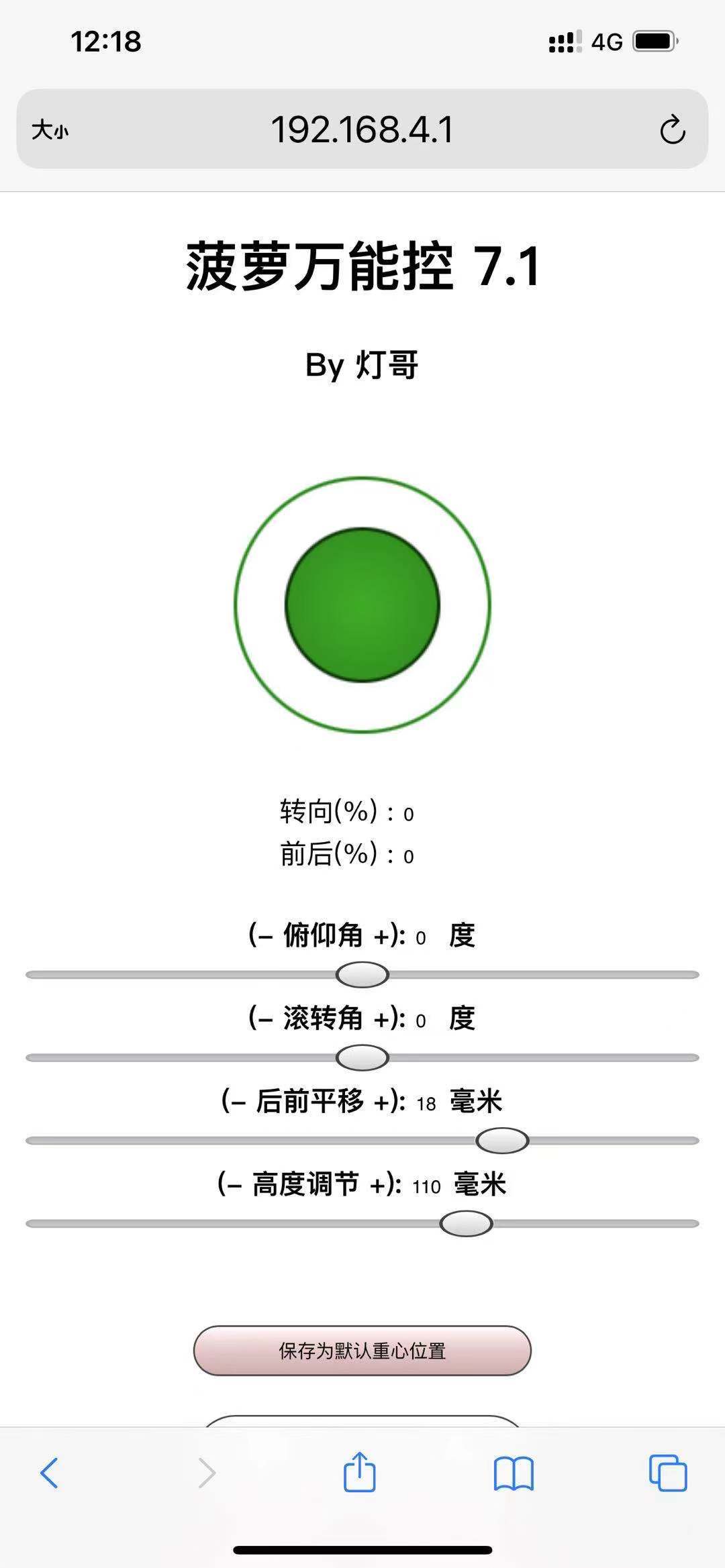
成功連接后,按照提示在網頁中訪問192.168.4.1,即可訪問控制界面,進行下一步的配置,
以上就是采用 Py-apple Dynamics Dev Tool 的程式燒錄方法,方便快捷,直接完成所有檔案的和環境的燒錄,可以直接開展使用,而 Py-apple Dynamics Dev Tool還有更多的功能,后續也會為有新的文章為大家一一進行介紹,
3 采用 UpyCraft 燒錄
UpyCraft 的燒錄方式是傳統的 micropython 平臺程式燒錄方式之一,利用它也可以進行燒錄,不過程序會稍微繁雜一些,在這里也對應做出說明,
首先打開UpyCraft軟體,點擊 BurnFirmware選項
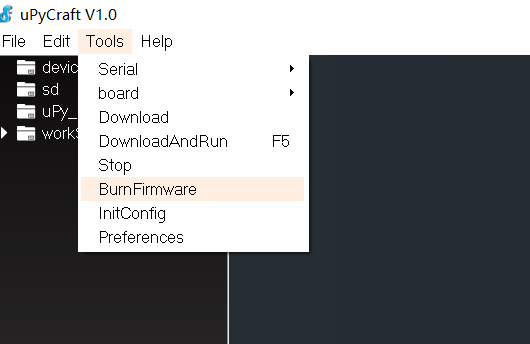
接著,出現如下界面
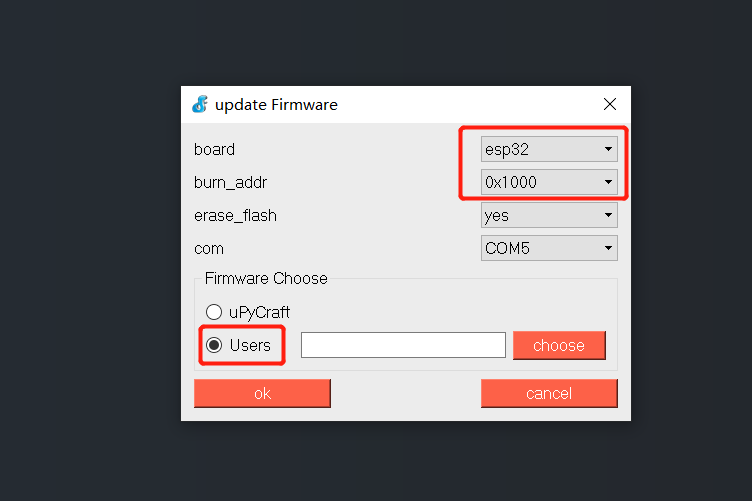
按照紅色框中所示選擇燒錄引數,選擇好后,串口com選擇你自己在設備管理器中找到的com口;完成后,點擊 choose,選擇燒錄環境對應的BIN檔案,然后點擊 OK,先燒錄 MicroPython 在 ESP32 上的運行環境 esp32.bin,點擊下載運行環境,
完成燒錄后,點擊右邊的連接符號,黃色框框著的控制臺界面處應該會出現 Python 的命令提示符符號,如下圖,
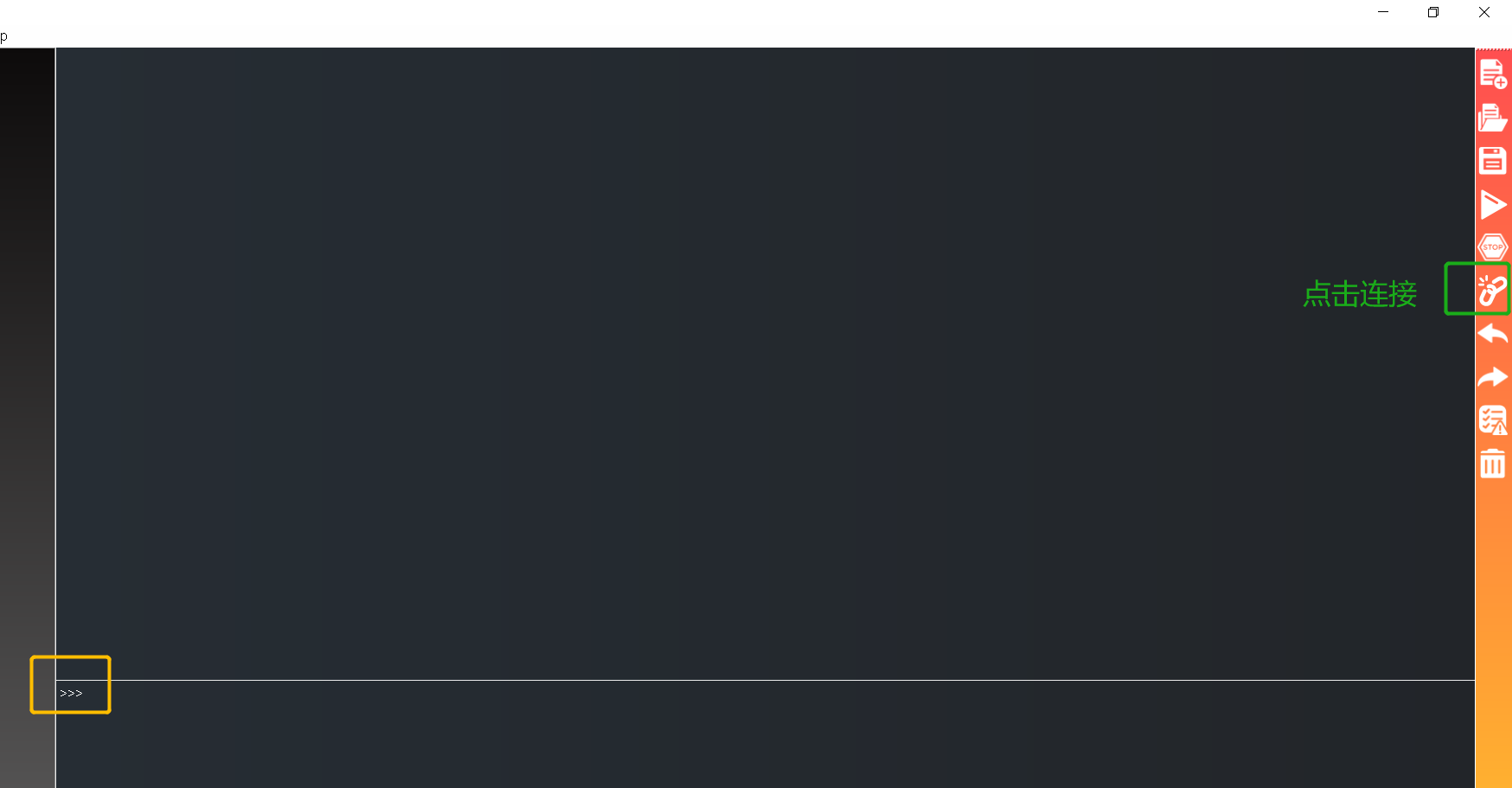
這樣就代表 Micropython 環境燒錄完成,接下來,就可以對程式檔案進行燒錄,
燒錄程式檔案,首先你要下載程式檔案(所有的.py檔案都要下載) 點擊下載,接著把這些檔案放在WorkSpace中(在Workspace檔案夾上右鍵,點擊Open,然后選擇放有你下載的代碼的程式檔案夾即可),完成后,如下如所示:
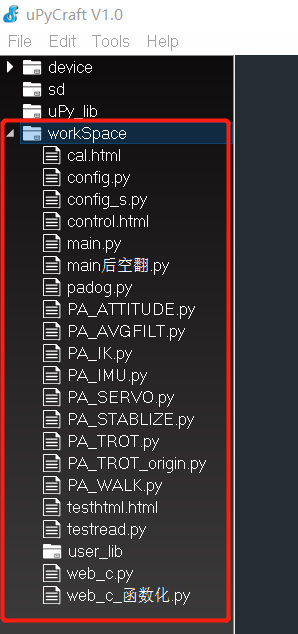
接著,在每個檔案上方,通過右鍵–>Open,打開代碼,所有的檔案都打開;
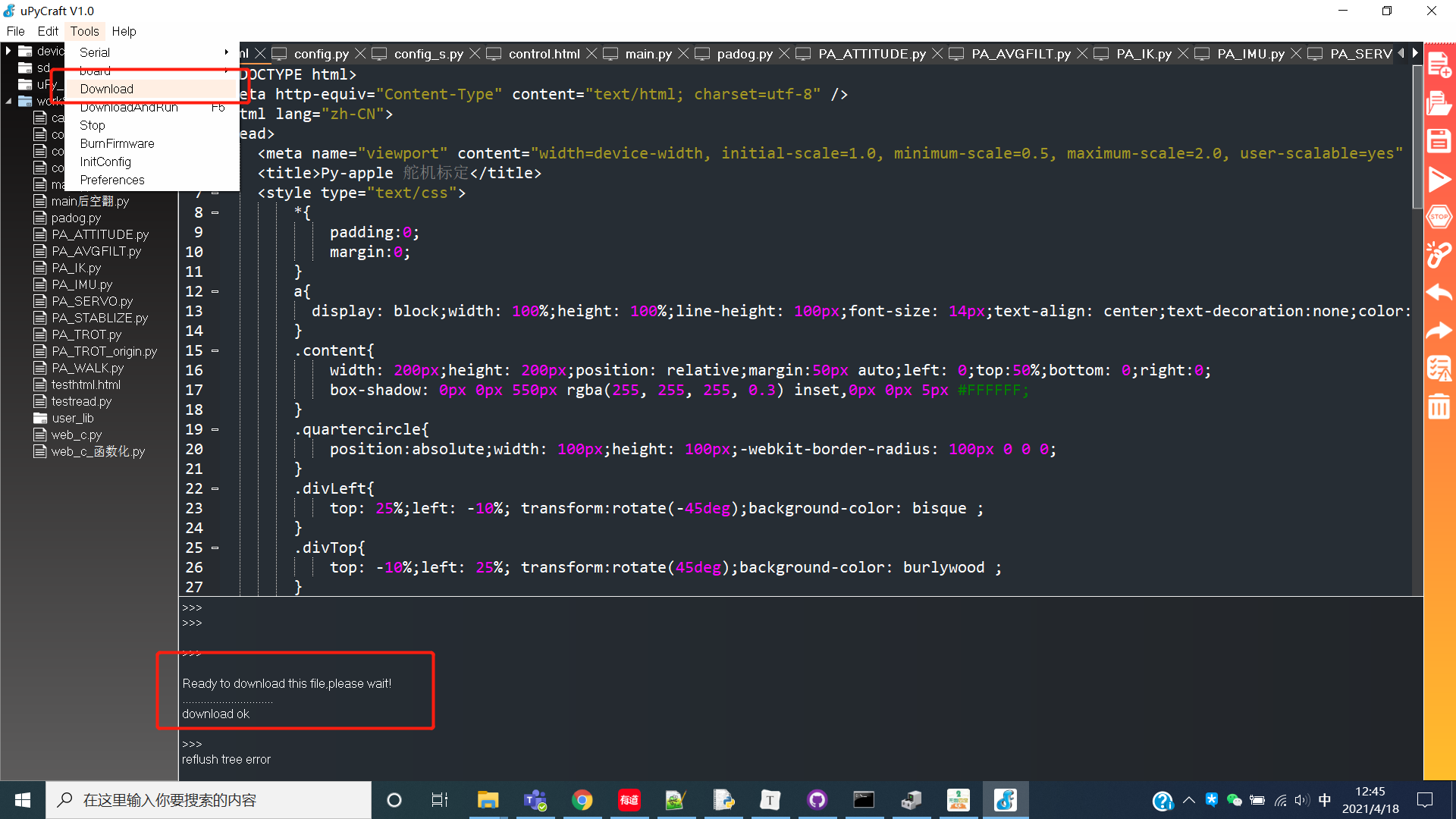
然后,如下圖所示,每個檔案都選擇 Dowload 進主控板中即可,Download成功后,在下方控制臺處會顯示 Download OK,如下圖紅色圈圈處所示,
完成燒錄后,按動四足機器狗控制板上的RST按鈕(直插板子)或者是EN按鈕(集成板子),復位板子,等待30S后,可以用電腦/手機搜索到ESP開頭的WIFi(你搜索到的WIFI后綴不一定和我一樣是6898E9,每個ESP板子都會有獨立的后綴編號),
成功連接后,按照提示在網頁中訪問192.168.4.1,即可訪問控制界面,進行下一步的配置,
這就是燒錄 Py-apple Dynamics 的程序,下節課的文章中,我將會教大家如何進行機器人的調中和校準,歡迎大家持續關注,
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/277745.html
標籤:其他
上一篇:STM32F103除錯串口(USART)模塊開發(內含Printf重定向函式說明及模塊代碼資源)
下一篇:微信小程式——電子書櫥