目錄
- 前言
- 一、SPI協議簡介
- SPI物理層
- SPI協議層
- 1.基本通訊程序
- 2. 通訊的起始和停止信號
- 3. 資料有效性
- 4. CPOL/CPHA 及通訊模式
- 二、STM32的SPI特性及架構
- STM32 SPI架構決議
- 1.邏輯引腳
- 2.時鐘控制邏輯
- 3.資料控制邏輯
- 4.整體控制邏輯
- STM32 SPI外設通訊程序
- 三、STM32 HAL庫中的SPI
- 1.SPI初始化結構體
- 2.介面函式
前言
前邊的幾篇筆記將STM32HAL片內主要外設的用法總結了一下,然而我們需要很多外圍電路進行拓展,比如我們需要外接存盤器進行檔案或資料存盤,需要LCD屏進行互動等待,這些外接設備需要和芯片進行通信,這些通信協議是接下來幾篇的內容,
一、SPI協議簡介
SPI 協議是由摩托羅拉公司提出的通訊協議(Serial Peripheral Interface),即串行外圍設備介面,是一種高速全雙工的通信總線,它被廣泛地使用在ADC、LCD 等設備與MCU 間,要求通訊速率較高的場合,
SPI物理層
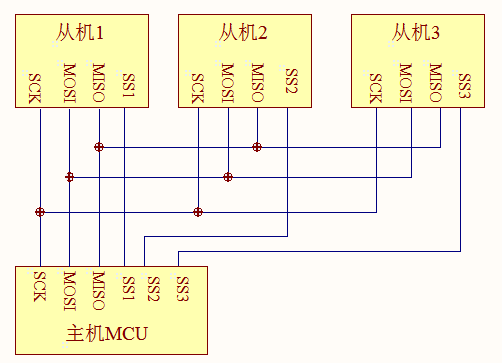
SPI 通訊使用3 條總線及片選線,3 條總線分別為SCK、MOSI、MISO,片選線為SS
,它們的作用介紹如下:
- SS( Slave Select):從設備選擇信號線,常稱為片選信號線,也稱為NSS、CS,以下用NSS 表示,當有多個SPI 從設備與SPI 主機相連時,設備的其它信號線SCK、MOSI 及MISO 同時并聯到相同的SPI 總線上,即無論有多少個從設備,都共同只使用這3 條總線;而每個從設備都有獨立的這一條NSS 信號線,本信號線獨占主機的一個引腳,即有多少個從設備,就有多少條片選信號線,I2C 協議中通過設備地址來尋址、選中總線上的某個設備并與其進行通訊;而SPI 協議中沒有設備地址,它使用NSS 信號線來尋址,當主機要選擇從設備時,把該從設備的NSS 信號線設定為低電平,該從設備即被選中,即片選有效,接著主機開始與被選中的從設備進行SPI 通訊,所以SPI 通訊以NSS 線置低電平為開始信號,以NSS 線被拉高作為結束信號,
- SCK (Serial Clock):時鐘信號線,用于通訊資料同步,它由通訊主機產生,決定了通訊的速率,不同的設備支持的最高時鐘頻率不一樣,如STM32 的SPI 時鐘頻率最大為fpclk/2,兩個設備之間通訊時,通訊速率受限于低速設備,
- MOSI (Master Output, Slave Input):主設備輸出/從設備輸入引腳,主機的資料從這條信號線輸出,從機由這條信號線讀入主機發送的資料,即這條線上資料的方向為主機到從機,
- MISO(Master Input,,Slave Output):主設備輸入/從設備輸出引腳,主機從這條信號線讀入資料,從機的資料由這條信號線輸出到主機,即在這條線上資料的方向為從機到主機,
SPI協議層
與I2C 的類似,SPI 協議定義了通訊的起始和停止信號、資料有效性、時鐘同步等環
節,
1.基本通訊程序
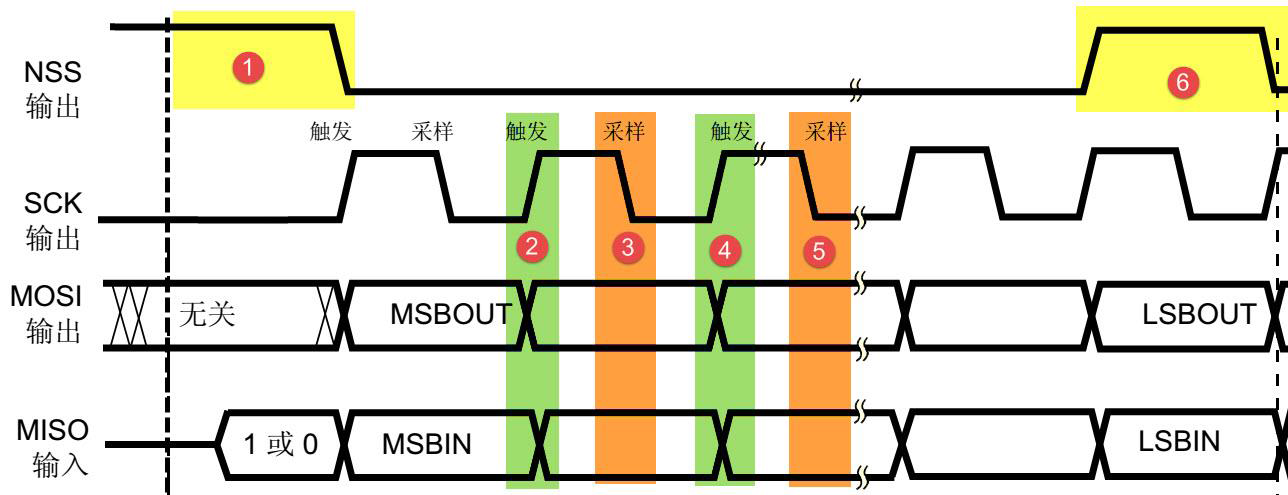
如圖是一個主機的通訊時序,NSS、SCK、MOSI 信號都由主機控制產生,而MISO 的信號由從機產生,主機通過該信號線讀取從機的資料,MOSI 與MISO 的信號只在NSS 為低電平的時候才有效,在SCK 的每個時鐘周期MOSI 和MISO 傳輸一位資料,
2. 通訊的起始和停止信號
圖中的標號1處,NSS 信號線由高變低,是SPI 通訊的起始信號,NSS 是每個從機各自獨占的信號線,當從機檢在自己的NSS 線檢測到起始信號后,就知道自己被主機選中了,開始準備與主機通訊,圖中的標號6處,NSS 信號由低變高,是SPI 通訊的停止信號,表示本次通訊結束,從機的選中狀態被取消,
3. 資料有效性
SPI 使用MOSI 及MISO 信號線來傳輸資料,使用SCK 信號線進行資料同步,MOSI及MISO 資料線在SCK 的每個時鐘周期傳輸一位資料,且資料輸入輸出是同時進行的,資料傳輸時,MSB 先行或LSB 先行并沒有作硬性規定,但要保證兩個SPI 通訊設備之間使用同樣的協定,一般都會采用圖中的MSB 先行模式,
觀察圖中的2345標號處,MOSI 及MISO 的資料在SCK 的上升沿期間變化輸出,在SCK 的下降沿時被采樣,即在SCK 的下降沿時刻,MOSI 及MISO 的資料有效,高電平時表示資料“1”,為低電平時表示資料“0”,在其它時刻,資料無效,MOSI 及MISO為下一次表示資料做準備,
SPI 每次資料傳輸可以8 位或16 位為單位,每次傳輸的單位數不受限制,
4. CPOL/CPHA 及通訊模式
上面講述的圖中的時序只是SPI 中的其中一種通訊模式,SPI 一共有四種通訊模式,它們的主要區別是總線空閑時SCK 的時鐘狀態以及資料采樣時刻,為方便說明,在此引入“時鐘極性CPOL”和“時鐘相位CPHA”的概念,
時鐘極性CPOL 是指SPI 通訊設備處于空閑狀態時,SCK 信號線的電平信號(即SPI 通訊開始前、 NSS 線為高電平時SCK 的狀態),CPOL=0 時, SCK 在空閑狀態時為低電平,CPOL=1 時,則相反,
時鐘相位CPHA 是指資料的采樣的時刻,當CPHA=0 時,MOSI 或MISO 資料線上的信號將會在SCK 時鐘線的“奇數邊沿”被采樣,當CPHA=1 時,資料線在SCK的“偶數邊沿”采樣,
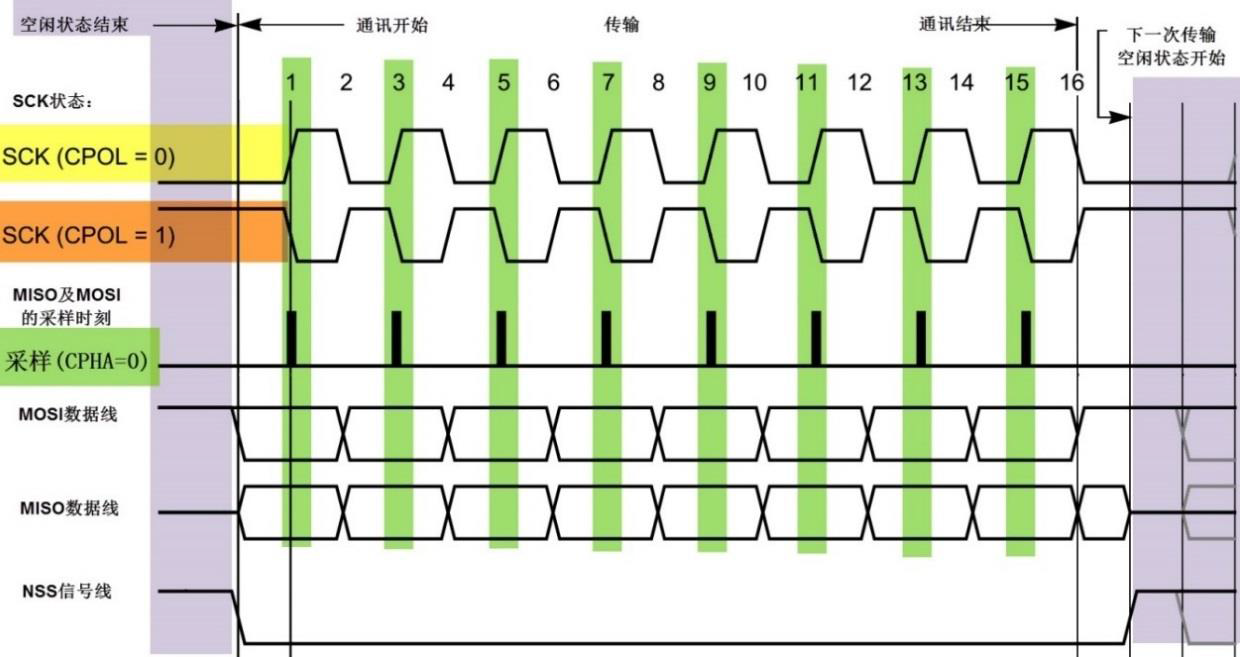
如圖是CHPA為0的時序圖,即在時鐘線的奇數邊沿采樣,首先,根據SCK 在空閑狀態時的電平,分為兩種情況,SCK 信號線在空閑狀態為低電平時,CPOL=0;空閑狀態為高電平時,CPOL=1,
無論CPOL=0 還是=1,因為我們配置的時鐘相位CPHA=0,在圖中可以看到,采樣時刻都是在SCK 的奇數邊沿,注意當CPOL=0 的時候,時鐘的奇數邊沿是上升沿,而CPOL=1 的時候,時鐘的奇數邊沿是下降沿,所以SPI 的采樣時刻不是由上升/下降沿決定的,MOSI 和MISO 資料線的有效信號在SCK 的奇數邊沿保持不變,資料信號將在SCK 奇數邊沿時被采樣,在非采樣時刻,MOSI 和MISO 的有效信號才發生切換,
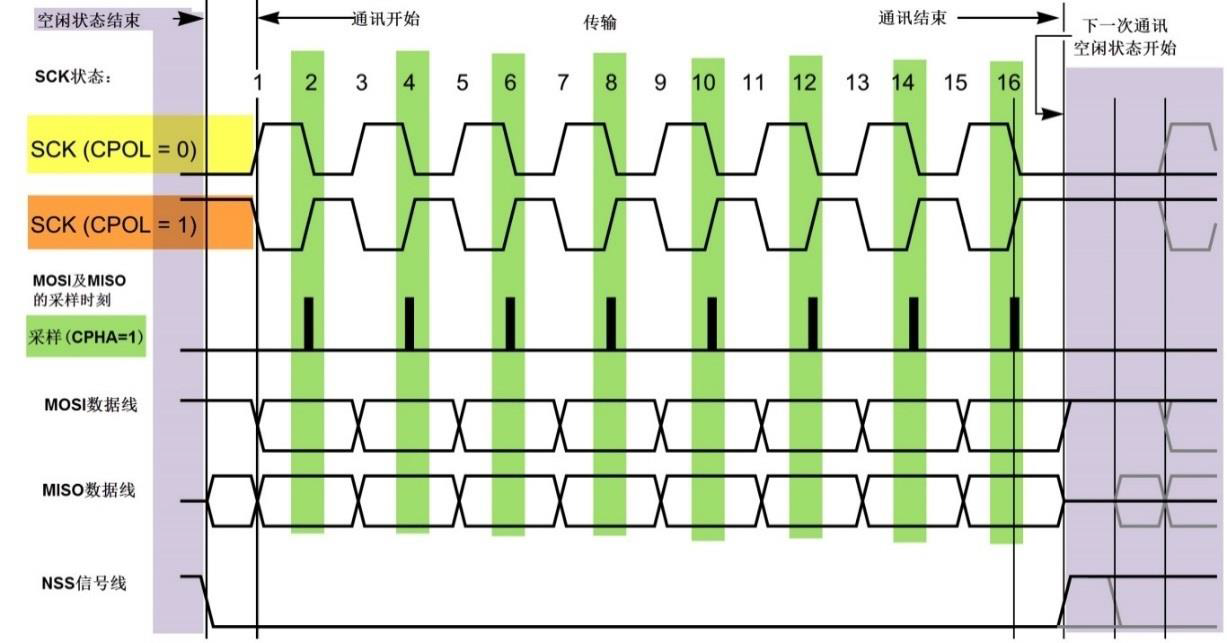
類似地,當CPHA=1 時,不受CPOL 的影響,資料信號在SCK 的偶數邊沿被采樣,如下圖所示,
由CPOL 及CPHA 的不同狀態,SPI 分成了四種模式,見下表,主機與從機需要作業在相同的模式下才可以正常通訊,實際中采用較多的是“模式0”與“模式3”,
| SPI模式 | CPOL | CPHA | 空閑時SCK時鐘 | 采樣時刻 |
|---|---|---|---|---|
| 0 | 0 | 0 | 低電平 | 奇數邊沿 |
| 1 | 0 | 1 | 低電平 | 偶數邊沿 |
| 2 | 1 | 0 | 高電平 | 奇數邊沿 |
| 3 | 1 | 1 | 高電平 | 偶數邊沿 |
二、STM32的SPI特性及架構
STM32 的SPI 外設可用作通訊的主機及從機,支持最高的SCK 時鐘頻率為fpclk/2,完全支持SPI 協議的4 種模式,資料幀長度可設定為8 位或16 位,可設定資料MSB 先行或LSB 先行,它還支持雙線全雙工(前面說明的都是這種模式)、雙線單向以及單線模式,其中雙線單向模式可以同時使用MOSI 及MISO 資料線向一個方向傳輸資料,可以加快一倍的傳輸速度,而單線模式則可以減少硬體接線,當然這樣速率會受到影響,
STM32 SPI架構決議
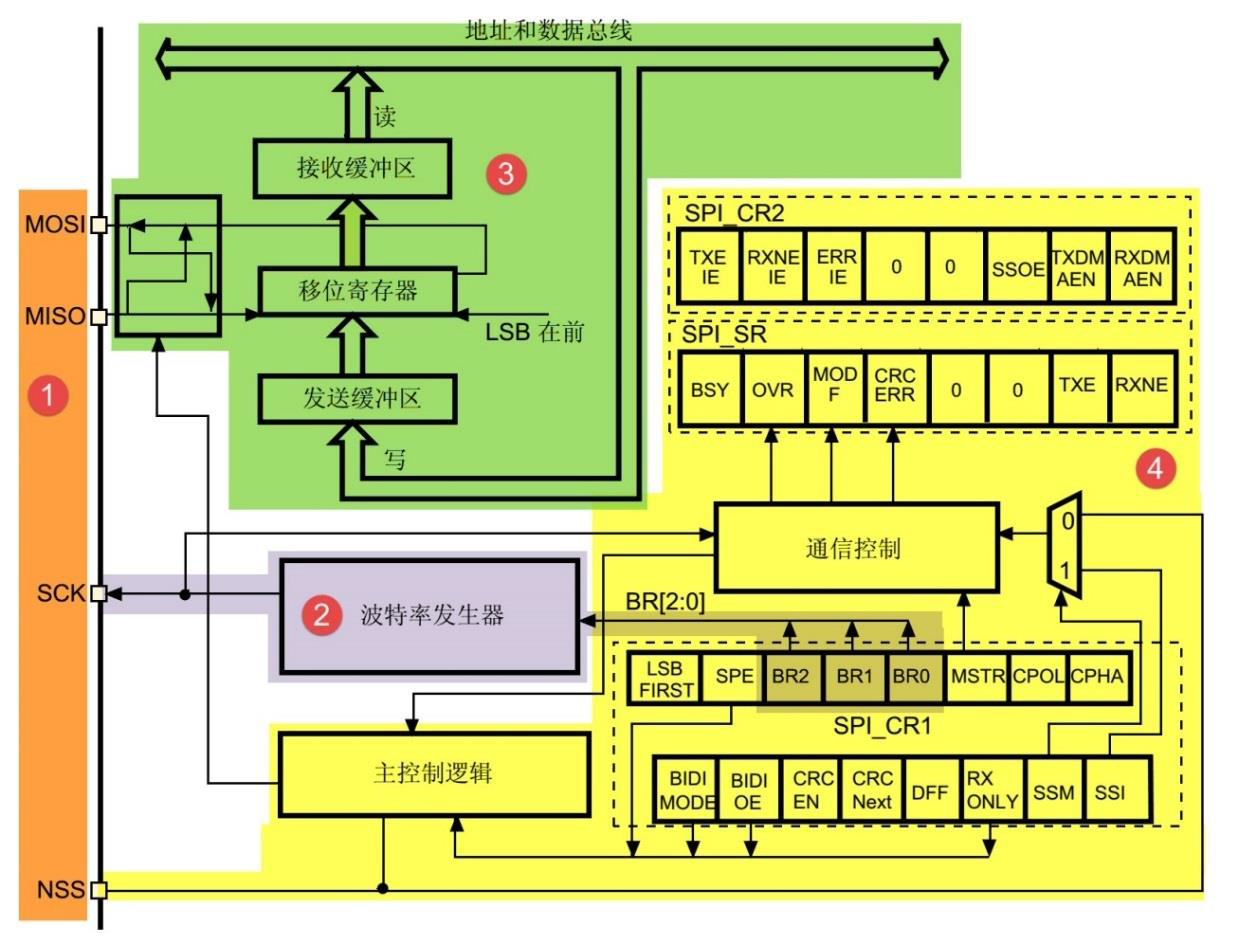
1.邏輯引腳
SPI 的所有硬體架構都從圖中左側MOSI、MISO、SCK 及NSS 線展開的,STM32 芯片有多個SPI 外設,它們的SPI 通訊信號引出到不同的GPIO 引腳上,使用時必須配置到這些指定的引腳,具體芯片的引腳復用查詢對應的資料手冊,
2.時鐘控制邏輯
SCK 線的時鐘信號,由波特率發生器根據“控制暫存器CR1‖中的BR[0:2]位控制,該位是對fpclk 時鐘的分頻因子,對fpclk 的分頻結果就是SCK 引腳的輸出時鐘頻率,
其中的fpclk 頻率是指SPI 所在的APB 總線頻率,APB1 為fpclk1,APB2 為fpckl2,通過配置“控制暫存器CR”的“CPOL 位”及“CPHA”位可以把SPI 設定成前面分析的4 種SPI 模式,
3.資料控制邏輯
SPI 的MOSI 及MISO 都連接到資料移位暫存器上,資料移位暫存器的內容來源于接識訓沖區及發送緩沖區以及MISO、MOSI 線,當向外發送資料的時候,資料移位暫存器以“發送緩沖區”為資料源,把資料一位一位地通過資料線發送出去;當從外部接收資料的時候,資料移位暫存器把資料線采樣到的資料一位一位地存盤到“接識訓沖區”中,通過寫SPI 的“資料暫存器DR”把資料填充到發送緩沖區中,通過 “資料暫存器DR”,可以獲取接識訓沖區中的內容,其中資料幀長度可以通過“控制暫存器CR1”的“DFF 位”配置成8 位及16 位模式;配置“LSBFIRST 位”可選擇MSB 先行還是LSB 先行,
4.整體控制邏輯
整體控制邏輯負責協調整個SPI 外設,控制邏輯的作業模式根據我們配置的“控制暫存器(CR1/CR2)”的引數而改變,基本的控制引數包括前面提到的SPI 模式、波特率、LSB先行、主從模式、單雙向模式等等,在外設作業時,控制邏輯會根據外設的作業狀態修改“狀態暫存器(SR)”,我們只要讀取狀態暫存器相關的暫存器位,就可以了解SPI 的作業狀態了,除此之外,控制邏輯還根據要求,負責控制產生SPI 中斷信號、DMA 請求及控制NSS 信號線,
實際應用中,我們一般不使用STM32 SPI 外設的標準NSS 信號線,而是更簡單地使用
普通的GPIO,軟體控制它的電平輸出,從而產生通訊起始和停止信號,
STM32 SPI外設通訊程序
STM32 使用SPI 外設通訊時,在通訊的不同階段它會對“狀態暫存器SR”的不同資料位寫入引數,我們通過讀取這些暫存器標志來了解通訊狀態,
下圖所示為STM32 作為SPI 通訊的主機端時的資料收發程序,采用模式3,空閑狀態為高電平,偶數邊沿觸發,
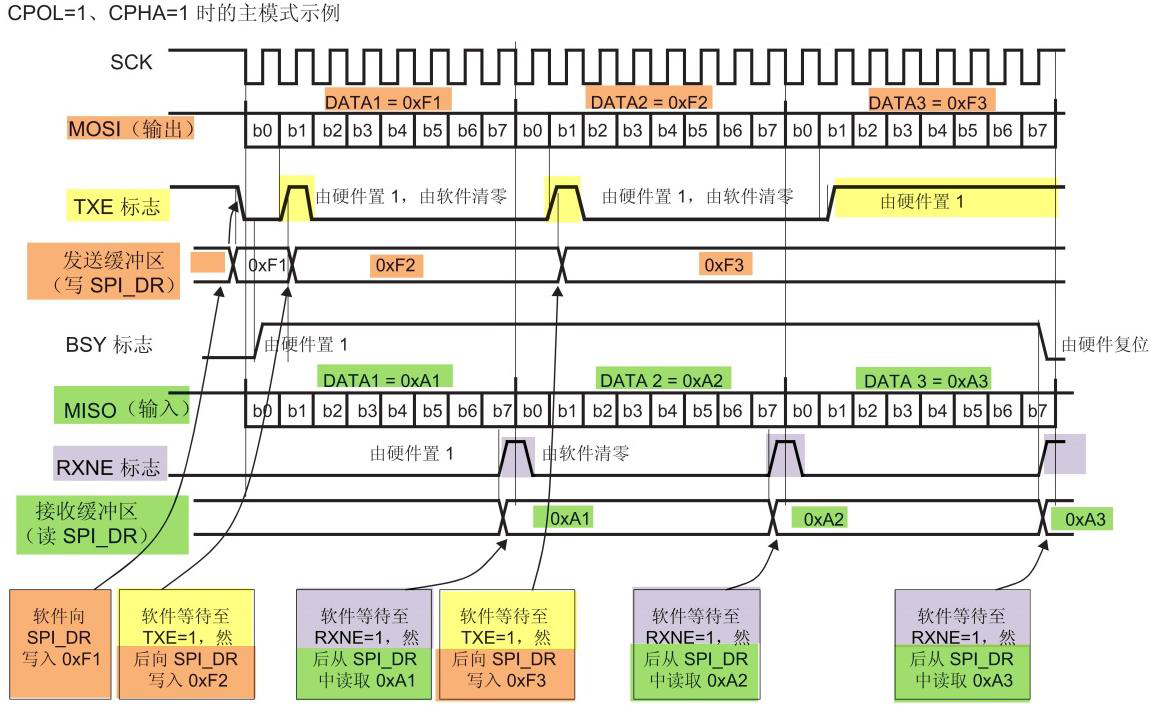
主模式收發流程及事件說明如下:
- 控制NSS 信號線,產生起始信號(圖中沒有畫出);
- 把要發送的資料寫入到“資料暫存器DR”中,該資料會被存盤到發送緩沖區;
- 通訊開始,SCK 時鐘開始運行,MOSI 把發送緩沖區中的資料一位一位地傳輸出去;MISO 則把資料一位一位地存盤進接識訓沖區中;
- 當發送完一幀資料的時候,“狀態暫存器SR”中的“TXE 標志位”會被置1,表示傳輸完一幀,發送緩沖區已空;類似地,當接收完一幀資料的時候,“RXNE標志位”會被置1,表示傳輸完一幀,接識訓沖區非空;
- 等待到“TXE 標志位”為1 時,若還要繼續發送資料,則再次往“資料暫存器DR”寫入資料即可;等待到“RXNE 標志位”為1 時,通過讀取“資料暫存器DR”可以獲取接識訓沖區中的內容,
假如我們使能了TXE 或RXNE 中斷,TXE 或RXNE 置1 時會產生SPI 中斷信號,進入同一個中斷服務函式,到SPI 中斷服務程式后,可通過檢查暫存器位來了解是哪一個事件,再分別進行處理,也可以使用DMA 方式來收發“資料暫存器DR”中的資料,
三、STM32 HAL庫中的SPI
1.SPI初始化結構體
跟其它外設一樣,STM32 HAL 庫提供了SPI 初始化結構體及初始化函式來配置SPI 外設,初始化結構體及函式定義在庫檔案“ STM32F4xx_hal_spi.h ” 及“STM32F4xx_hal_spi.c”中,編程時我們可以結合這兩個檔案內的注釋使用或參考庫幫助檔案,
代碼如下(示例):
typedef struct
{
uint32_t Mode; /*設定SPI 的主/從機端模式*/
uint32_t Direction; /*設定SPI 的單雙向模式*/
uint32_t DataSize; /*設定SPI 的資料幀長度,可選8/16 位*/
uint32_t CLKPolarity; /*設定時鐘極性CPOL,可選高/低電平*/
uint32_t CLKPhase; /*設定時鐘相位,可選奇/偶數邊沿采樣 */
uint32_t NSS; /*設定NSS 引腳由SPI 硬體控制還是軟體控制*/
uint32_t BaudRatePrescaler; /*設定時鐘分頻因子,fpclk/分頻數=fSCK*/
uint32_t FirstBit; /*設定MSB/LSB 先行 */
uint32_t TIMode; /*指定是否啟用TI 模式*/
uint32_t CRCCalculation; /*指定是否啟用CRC 計算*/
uint32_t CRCPolynomial; /*設定CRC 校驗的運算式*/
} SPI_InitTypeDef;
這些結構體成員說明如下,其中括號內的文字是對應引數在STM32 HAL 庫中定義的
宏:
- Mode:本成員設定SPI 作業在主機模式(SPI_MODE_MASTER)或從機模式(SPI_MODE_SLAVE ),這兩個模式的最大區別為SPI 的SCK 信號線的時序,SCK 的時序是由通訊中的主機產生的,若被配置為從機模式,STM32 的SPI 外設將接受外來的SCK信號,
- Direction:本成員設定SPI 的通訊方向,可設定為雙線全雙工(SPI_DIRECTION_2LINES),雙線只接收(SPI_DIRECTION_2LINES_RXONLY),單線SPI_DIRECTION_1LINE,
- DataSize:本成員可以選擇SPI 通訊的資料幀大小是為8 位(SPI_DATASIZE_8BIT)還是16 位(SPI_DATASIZE_16BIT),
- CLKPolarity 和CLKPhase:這兩個成員配置SPI 的時鐘極性CLKPolarity 和時鐘相位CLKPhase,這兩個配置影響到SPI 的通訊模式,
時鐘極性CLKPolarity 成員,可設定為高電平(SPI_POLARITY_HIGH)或低電平(SPI_POLARITY_LOW ),
時鐘相位CPHA 則可以設定為SPI_PHASE_1EDGE (在SCK 的奇數邊沿采集資料) 或SPI_PHASE_2EDGE (在SCK 的偶數邊沿采集資料) , - NSS:本成員配置NSS 引腳的使用模式,可以選擇為硬體模式(SPI_NSS_HARD )與軟體模式( SPI_NSS_SOFT ),在硬體模式中的SPI 片選信號由SPI 硬體自動產生,而軟體模式則需要我們親自把相應的GPIO 埠拉高或置低產生非片選和片選信號,實際中軟體模式應用比較多,
- BaudRatePrescaler:本成員設定波特率分頻因子,分頻后的時鐘即為SPI 的SCK 信號線的時鐘頻率,這個成員引數可設定為fpclk 的2、4、6、8、16、32、64、128、256 分頻,
- FirstBit:所有串行的通訊協議都會有MSB 先行(高位資料在前)還是LSB 先行(低位資料在前)的問題,而STM32 的SPI 模塊可以通過這個結構體成員,對這個特性編程控制,
- TIMode:指定是否啟用TI 模式,可選擇為使能( SPI_TIMODE_ENABLE )與不是能( SPI_TIMODE_DISABLE ),
- CRCCalculation和SPI_CRCPolynomial:指定是否啟用CRC 計算,若我們使用CRC 校驗時,就使用這個成員的引數(多項式),來計算CRC 的值,
配置完這些結構體成員值,呼叫庫函式HAL_SPI_Init 即可把結構體的配置寫入到暫存器中,然后呼叫__HAL_SPI_ENABLE 來使能SPI 外設,
以上這些引數配置均可在CubeMX中完成,
2.介面函式
如下為輪詢查找的介面函式,同樣也有中斷和DMA方式的介面函式,
HAL_StatusTypeDef HAL_SPI_Transmit(SPI_HandleTypeDef *hspi, uint8_t *pData, uint16_t Size, uint32_t Timeout);
HAL_StatusTypeDef HAL_SPI_Receive(SPI_HandleTypeDef *hspi, uint8_t *pData, uint16_t Size, uint32_t Timeout);
HAL_StatusTypeDef HAL_SPI_TransmitReceive(SPI_HandleTypeDef *hspi, uint8_t *pTxData, uint8_t *pRxData, uint16_t Size,
uint32_t Timeout);
HAL_StatusTypeDef HAL_SPI_Transmit_IT(SPI_HandleTypeDef *hspi, uint8_t *pData, uint16_t Size);
HAL_StatusTypeDef HAL_SPI_Receive_IT(SPI_HandleTypeDef *hspi, uint8_t *pData, uint16_t Size);
HAL_StatusTypeDef HAL_SPI_TransmitReceive_IT(SPI_HandleTypeDef *hspi, uint8_t *pTxData, uint8_t *pRxData,
uint16_t Size);
HAL_StatusTypeDef HAL_SPI_Transmit_DMA(SPI_HandleTypeDef *hspi, uint8_t *pData, uint16_t Size);
HAL_StatusTypeDef HAL_SPI_Receive_DMA(SPI_HandleTypeDef *hspi, uint8_t *pData, uint16_t Size);
HAL_StatusTypeDef HAL_SPI_TransmitReceive_DMA(SPI_HandleTypeDef *hspi, uint8_t *pTxData, uint8_t *pRxData,
uint16_t Size);
HAL_StatusTypeDef HAL_SPI_DMAPause(SPI_HandleTypeDef *hspi);
HAL_StatusTypeDef HAL_SPI_DMAResume(SPI_HandleTypeDef *hspi);
HAL_StatusTypeDef HAL_SPI_DMAStop(SPI_HandleTypeDef *hspi);
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/278934.html
標籤:其他