目錄
- 前言
- 特別宣告:
- 代碼下載:
- 功能介紹:
- 接線
- STM32
- STM32F1開發指南(精英版)-庫函式版本_V1.2
- STM32中文參考手冊
- RFID-RC522
- RFID射頻模塊電路原理圖
- 使用圖+效果圖
- 測驗程式0 RC522_Handle()
- 最終效果
- 一、先用手機軟體NFC Writer讀取空卡看看內容
- 1、打開軟體和NFC(ps:我的手機是小米10)
- 2、將空卡貼于手機背部,彈出提示發現新卡,點擊“好的”
- 3、上面的新卡片左滑到新卡片1,單擊這個卡片
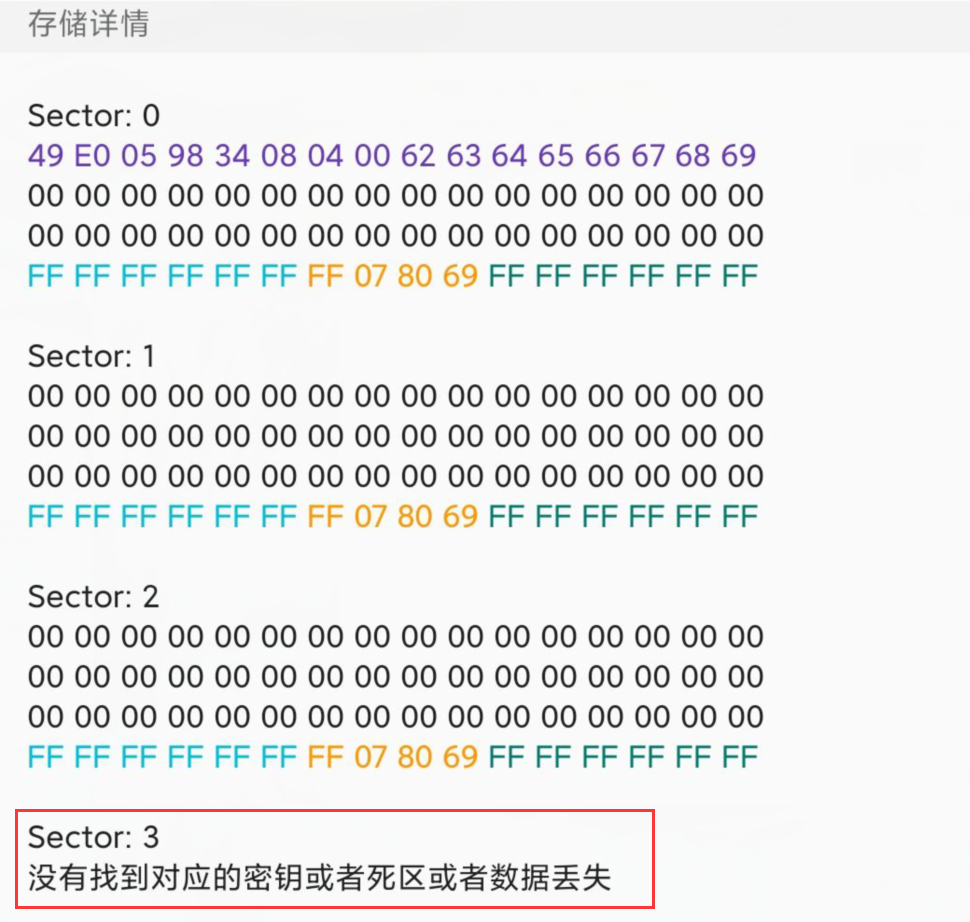
- 4、進入卡片資訊詳細頁面
- 鑰匙扣卡
- M1空白卡
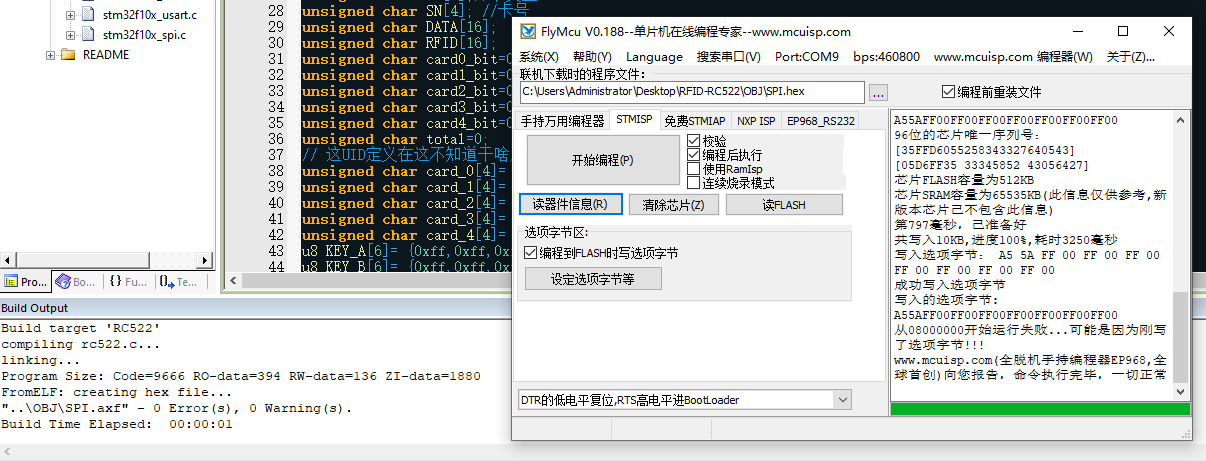
- 二、編譯、燒寫程式
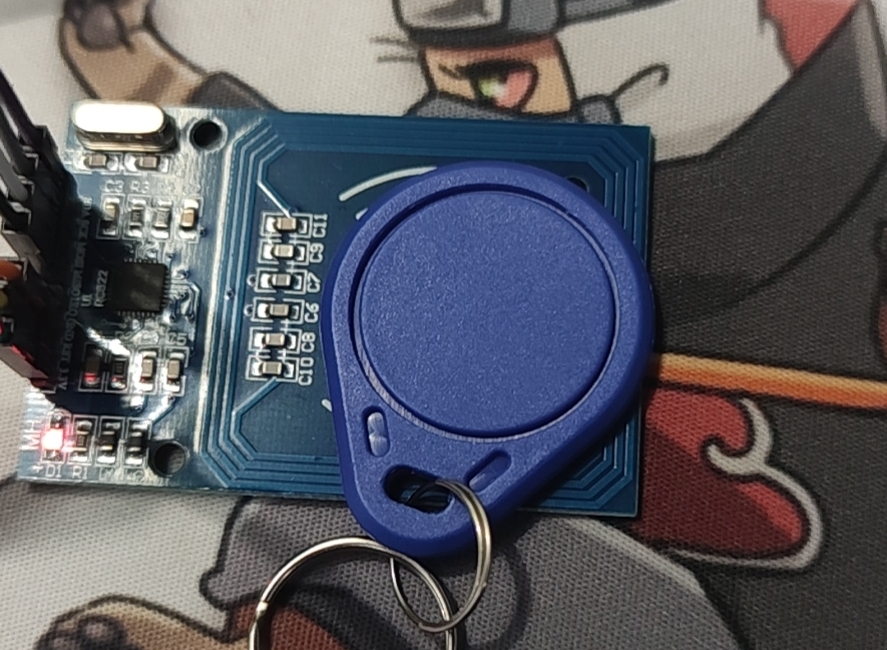
- 三、將鑰匙扣卡發在模塊上,打開串口,開始測驗
- 測驗程式1 RC522_Handle1()
- 核心代碼
- main.c
- rc522.h
- rc522.c
前言
特別宣告:
-
本倉庫發布的程式,僅用于測驗和學習研究,禁止用于商業用途,不能保證其合法性,準確性,完整性和有效性,請根據情況自行判斷,
-
本人對任何腳本問題概不負責,包括但不限于由任何腳本錯誤導致的任何損失或損害,
-
間接使用腳本的任何用戶,包括但不限于建立VPS或在某些行為違反國家/地區法律或相關法規的情況下進行傳播, 本人對于由此引起的任何隱私泄漏或其他后果概不負責,
-
任何以任何方式查看此專案的人或直接或間接使用該專案的任何程式的使用者都應仔細閱讀此宣告,本人保留隨時更改或補充此免責宣告的權利,一旦使用并復制了任何相關腳本或Script專案的規則,則視為您已接受此免責宣告,
本文不含任何廣告性質,僅供學習參考,寫卡需謹慎!!!,不然可能會玩崩了,血的教訓!!!
參考資料:
淺談IC卡資料分析
智能卡 ISO14443 協議 解讀
STM32F103ZET–RFID-RC522使用例程(戰艦版)
M1卡使用說明書
M1卡介紹
STM32-RC522
Mifare1技術說明(M1卡說明檔案)
原始碼參考:RFID-RC522,不能使用,我進行了一定的修改,下載參考下方傳送門,
開發板:正點原子 STM32F103 精英版

語言:C語言
開發環境:Keil5
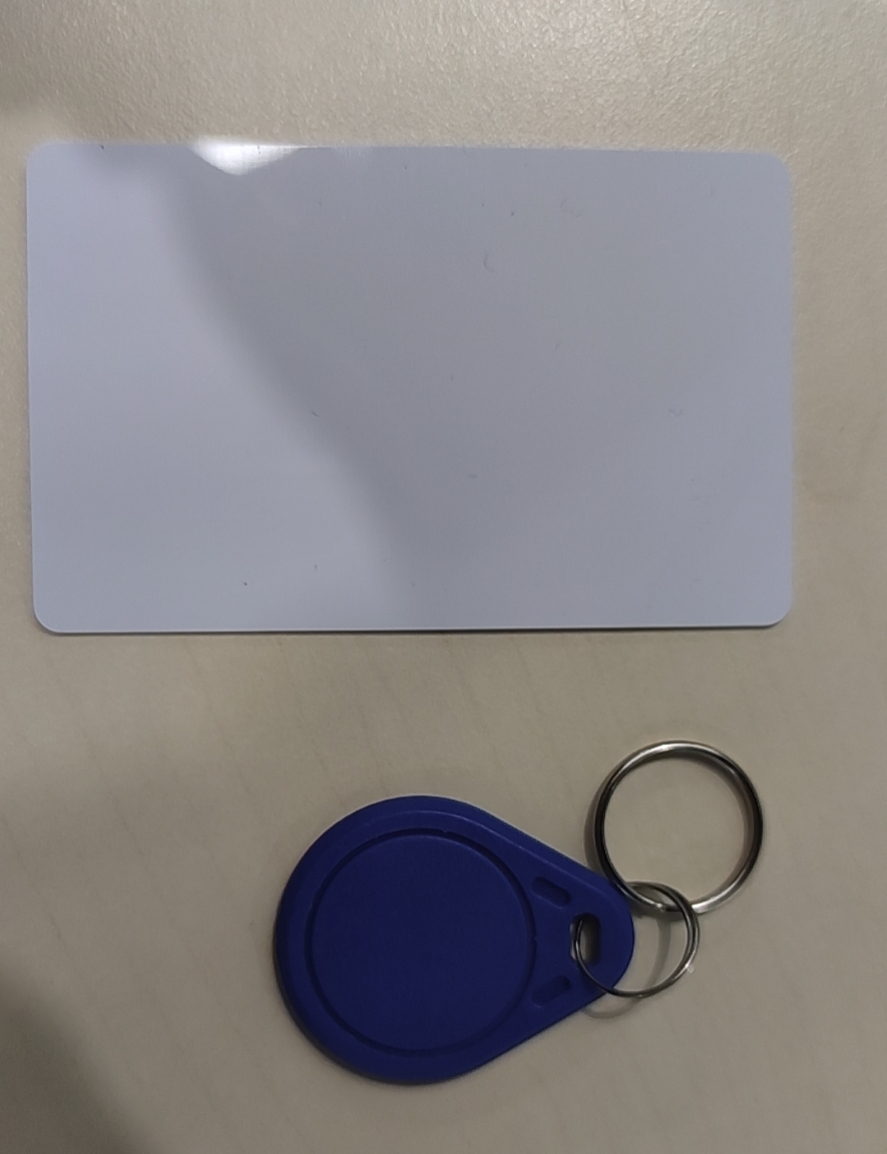
開發板使用了 LED SPI USART RFID-RC522模塊 鑰匙扣卡 M1卡

Win10軟體 SSCOM串口除錯 FlyMcu燒錄(ps:電腦安裝驅動CH340)
安卓軟體 NFC Writer (手機需有NFC功能)
代碼下載:
碼云 GitHub
功能介紹:
尋卡-》防沖撞-》選卡-》驗證2扇區密鑰-》讀取2扇區0區塊資料-》寫入資料到2扇區0區塊-》再讀取2扇區0區塊資料,
串口列印卡UID,驗證結果,讀取到的2扇區0區塊資料等資訊,(ps:實測發現0扇區和1扇區不能進行讀取操作)
注意:只有驗證成功的扇區,才能對此扇區進行讀寫操作!
// 驗證A密鑰 塊地址 密碼 SN
// 注意:此處的塊地址0x0B即2扇區3區塊,此塊地址只需要指向某一扇區就可以了,
// 即2扇區為0x08-0x0B這個范圍都有效,且只能對驗證過的扇區進行讀寫操作
status = PcdAuthState(0x60, 0x0B, KEY_A, SN);
// 讀取M1卡一塊資料 塊地址 讀取的資料
// 注意:因為上面驗證的扇區是2扇區,所以只能對2扇區的資料進行讀寫,即0x08-0x0B這個范圍,
// 超出范圍讀取失敗,
status = PcdRead(0x08, DATA);
另外:3區塊的密鑰A單片機讀取出來是全00,手機是全ff
控制字的默認值是“FF078069”,此時
A密鑰:不可被讀出,有全部權限
B密鑰:可被讀出,沒有任何權限
下圖參考:https://blog.csdn.net/hiwoshixiaoyu/article/details/104048663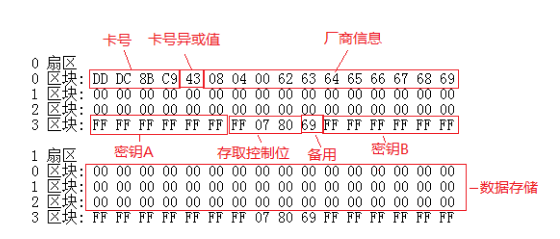
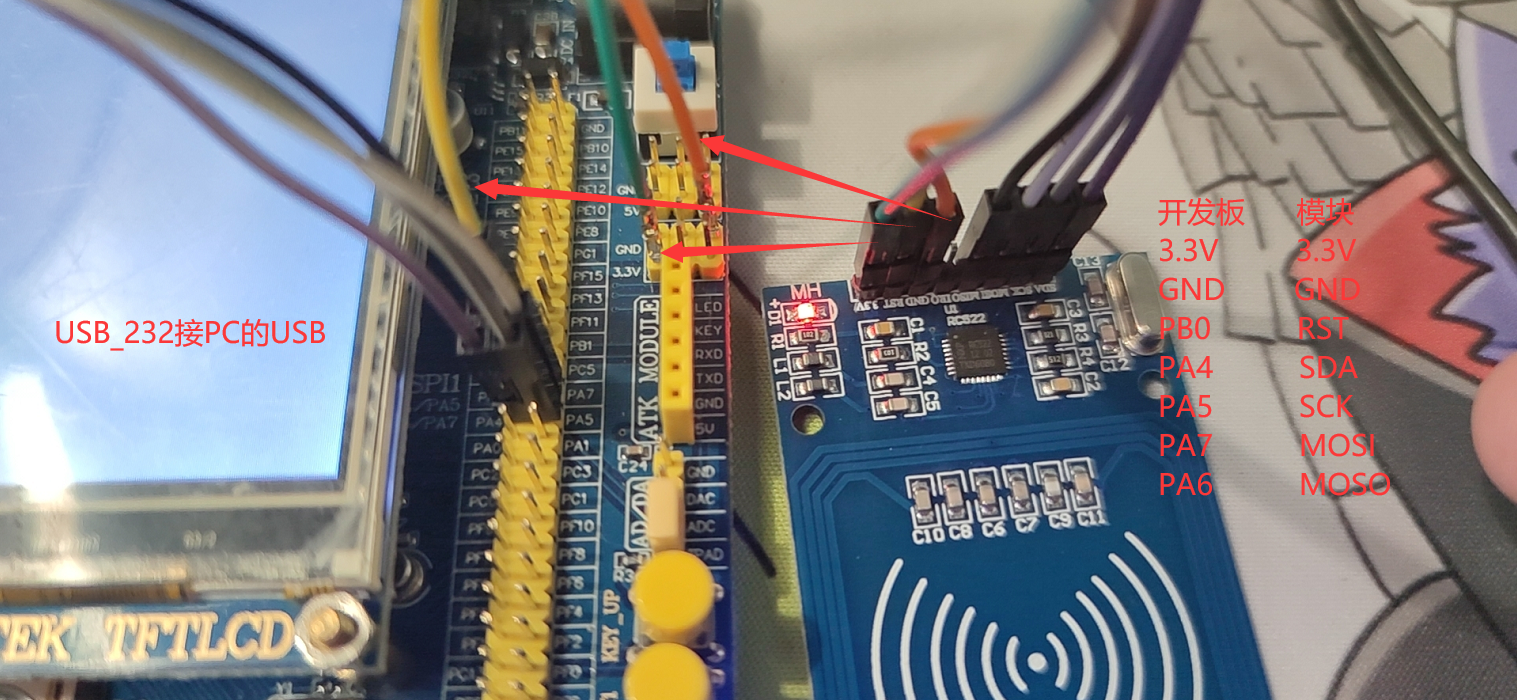
接線
1--SDA <----->PA4
2--SCK <----->PA5
3--MOSI <----->PA7
4--MISO <----->PA6
5--懸空
6--GND <----->GND
7--RST <----->PB0
8--VCC <----->VCC
STM32
STM32F1開發指南(精英版)-庫函式版本_V1.2

STM32中文參考手冊

RFID-RC522
參考:https://www.cirmall.com/circuit/2149/
RFID射頻模塊電路原理圖

使用圖+效果圖
測驗程式0 RC522_Handle()
最終效果

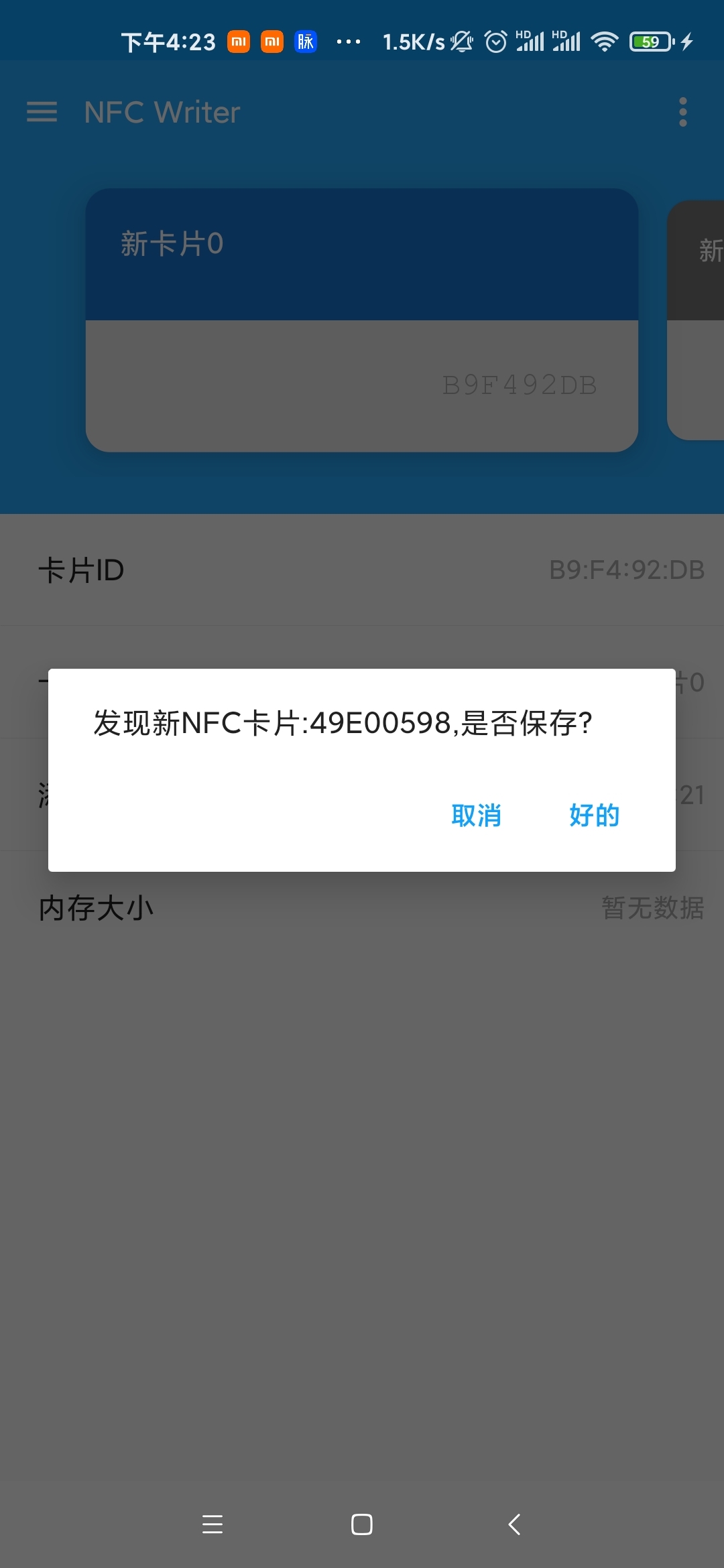
一、先用手機軟體NFC Writer讀取空卡看看內容
1、打開軟體和NFC(ps:我的手機是小米10)

2、將空卡貼于手機背部,彈出提示發現新卡,點擊“好的”
3、上面的新卡片左滑到新卡片1,單擊這個卡片

4、進入卡片資訊詳細頁面
鑰匙扣卡
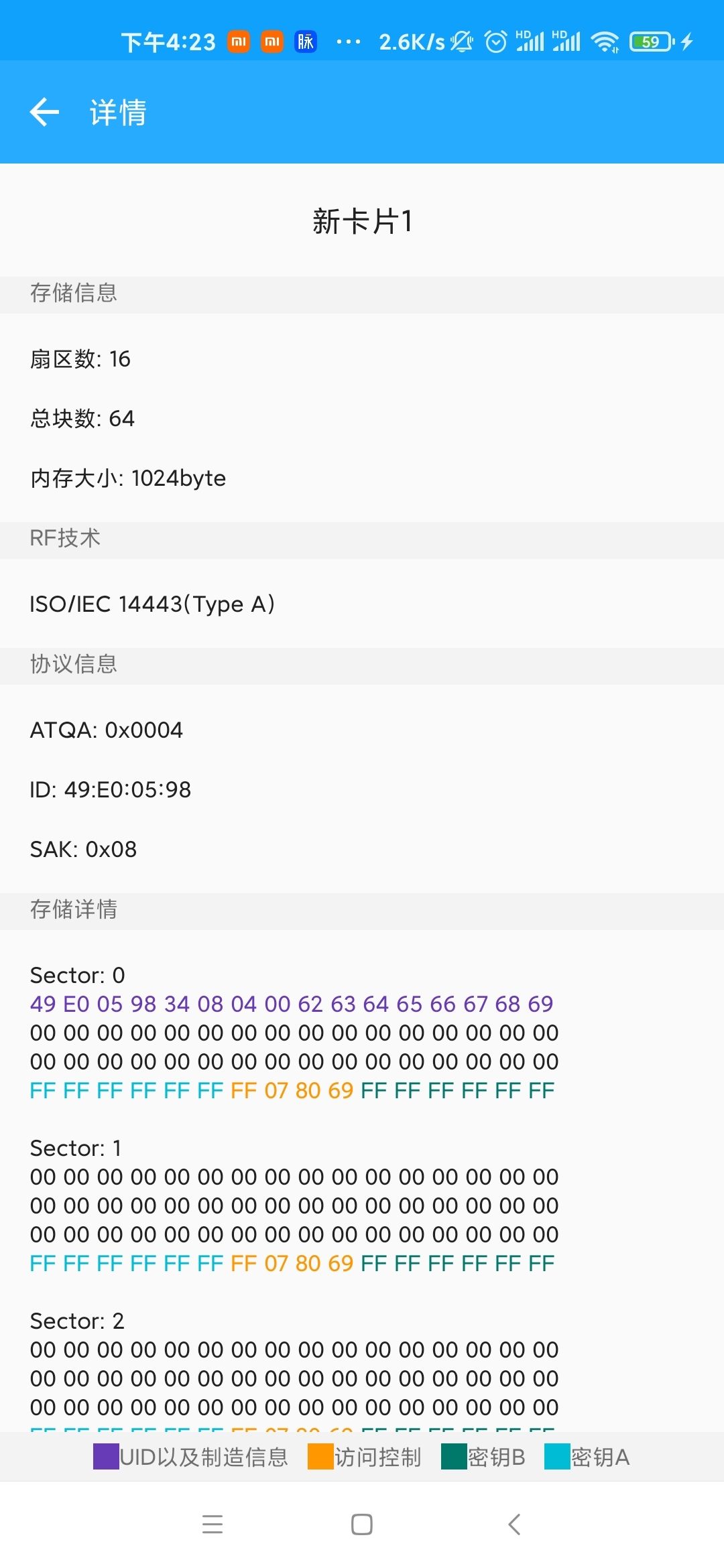
M1空白卡

可以發現2張卡除了卡號和卡號異或值不同外,其他資料都一樣,之后的例子都以鑰匙扣卡舉例,
下圖參考:https://blog.csdn.net/hiwoshixiaoyu/article/details/104048663
二、編譯、燒寫程式
三、將鑰匙扣卡發在模塊上,打開串口,開始測驗
串口列印
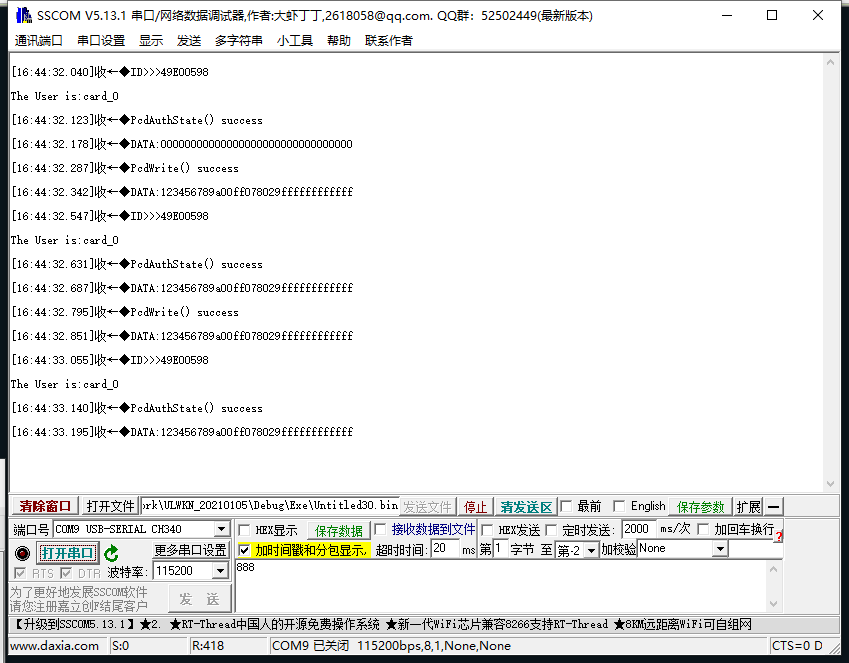
注意 原卡 2扇區0區塊資料為

我們放上卡后,進行了資料寫入,之后讀取到的資料都為DATA1的資料0.0
unsigned char DATA1[16]= {0x12,0x34,0x56,0x78,0x9A,0x00,0xff,0x07,0x80,0x29,0xff,0xff,0xff,0xff,0xff,0xff};
// 0x08 就是2扇區0區塊(即第9塊)
unsigned char addr=0x08;
status = PcdWrite(addr, DATA1);
此時資料寫入完畢后,我們再將鑰匙扣卡貼于手機,看看現在手機讀取出來的結果

OK,看樣子寫入成功了,那么到此例程就結束了,
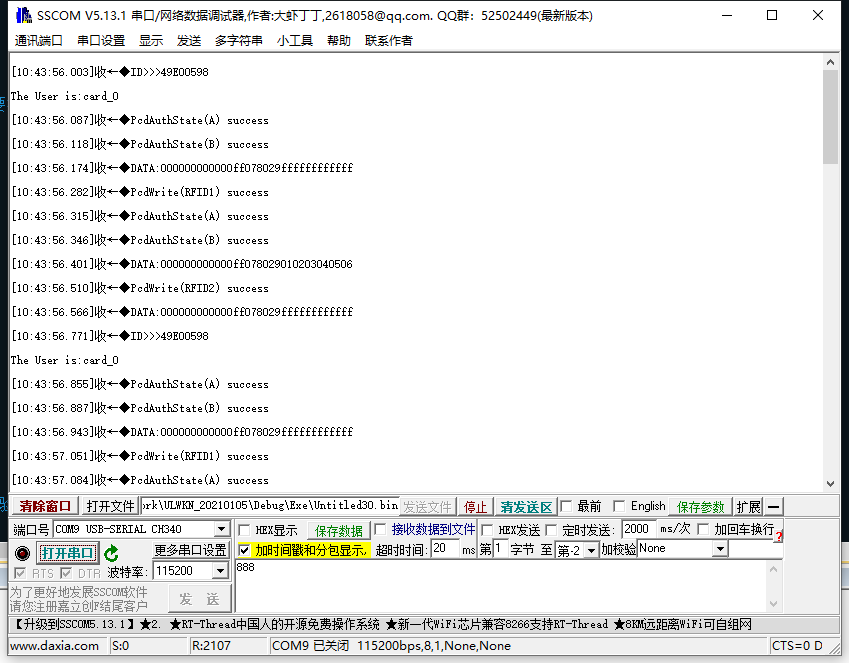
測驗程式1 RC522_Handle1()
測驗程式1,完成0x0F塊 驗證KEY_A、KEY_B 讀 寫RFID1 驗證KEY_A1、KEY_B1 讀 寫RFID2
// 測驗用 3區塊資料
unsigned char RFID1[16]= {0x10,0x20,0x30,0x40,0x50,0x60,0xff,0x07,0x80,0x29,0x01,0x02,0x03,0x04,0x05,0x06};
unsigned char RFID2[16]= {0xff,0xff,0xff,0xff,0xff,0xff,0xff,0x07,0x80,0x29,0xff,0xff,0xff,0xff,0xff,0xff};
// 測驗用 3區塊密鑰
u8 KEY_A1[6]= {0x10,0x20,0x30,0x40,0x50,0x60};
u8 KEY_B1[6]= {0x01,0x02,0x03,0x04,0x05,0x06};
核心代碼
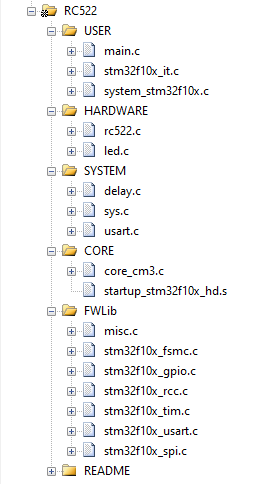
main.c
#include "delay.h"
#include "sys.h"
#include "usart.h"
#include "rc522.h"
#include "led.h"
/**
* 連線說明:
* 1--SDA <----->PA4
* 2--SCK <----->PA5
* 3--MOSI <----->PA7
* 4--MISO <----->PA6
* 5--懸空
* 6--GND <----->GND
* 7--RST <----->PB0
* 8--VCC <----->VCC
**/
int main(void)
{
u8 num = 0;
delay_init(); //延時函式初始化
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//設定中斷優先級分組為組2:2位搶占優先級,2位回應優先級
uart_init(115200); //串口初始化為115200
LED_Init();
RC522_Init(); //初始化射頻卡模塊
while(1)
{
// 重要提醒,寫卡操作有風險,請勿隨意嘗試,不能保證程式安全性,本人對任何程式問題概不負責,不限于由任何程式錯誤導致的任何損失或損害
// 測驗程式0,完成addr讀寫讀
RC522_Handle();
// 謹慎使用 測驗程式1,完成0x0F塊 驗證KEY_A、KEY_B 讀 寫RFID1 驗證KEY_A1、KEY_B1 讀 寫RFID2
// RC522_Handle1();
if(num % 20 == 0)
LED0 = !LED0;
num++;
}
}
rc522.h
#ifndef __RC522_H
#define __RC522_H
#include "sys.h"
#include "stm32f10x.h"
/
//MF522命令字
/
#define PCD_IDLE 0x00 //取消當前命令
#define PCD_AUTHENT 0x0E //驗證密鑰
#define PCD_RECEIVE 0x08 //接收資料
#define PCD_TRANSMIT 0x04 //發送資料
#define PCD_TRANSCEIVE 0x0C //發送并接收資料
#define PCD_RESETPHASE 0x0F //復位
#define PCD_CALCCRC 0x03 //CRC計算
/
//Mifare_One卡片命令字
/
#define PICC_REQIDL 0x26 //尋天線區內未進入休眠狀態
#define PICC_REQALL 0x52 //尋天線區內全部卡
#define PICC_ANTICOLL1 0x93 //防沖撞
#define PICC_ANTICOLL2 0x95 //防沖撞
#define PICC_AUTHENT1A 0x60 //驗證A密鑰
#define PICC_AUTHENT1B 0x61 //驗證B密鑰
#define PICC_READ 0x30 //讀塊
#define PICC_WRITE 0xA0 //寫塊
#define PICC_DECREMENT 0xC0 //扣款
#define PICC_INCREMENT 0xC1 //充值
#define PICC_RESTORE 0xC2 //調塊資料到緩沖區
#define PICC_TRANSFER 0xB0 //保存緩沖區中資料
#define PICC_HALT 0x50 //休眠
/
//MF522 FIFO長度定義
/
#define DEF_FIFO_LENGTH 64 //FIFO size=64byte
#define MAXRLEN 18
/
//MF522暫存器定義
/
// PAGE 0
#define RFU00 0x00
#define CommandReg 0x01
#define ComIEnReg 0x02
#define DivlEnReg 0x03
#define ComIrqReg 0x04
#define DivIrqReg 0x05
#define ErrorReg 0x06
#define Status1Reg 0x07
#define Status2Reg 0x08
#define FIFODataReg 0x09
#define FIFOLevelReg 0x0A
#define WaterLevelReg 0x0B
#define ControlReg 0x0C
#define BitFramingReg 0x0D
#define CollReg 0x0E
#define RFU0F 0x0F
// PAGE 1
#define RFU10 0x10
#define ModeReg 0x11
#define TxModeReg 0x12
#define RxModeReg 0x13
#define TxControlReg 0x14
#define TxAutoReg 0x15
#define TxSelReg 0x16
#define RxSelReg 0x17
#define RxThresholdReg 0x18
#define DemodReg 0x19
#define RFU1A 0x1A
#define RFU1B 0x1B
#define MifareReg 0x1C
#define RFU1D 0x1D
#define RFU1E 0x1E
#define SerialSpeedReg 0x1F
// PAGE 2
#define RFU20 0x20
#define CRCResultRegM 0x21
#define CRCResultRegL 0x22
#define RFU23 0x23
#define ModWidthReg 0x24
#define RFU25 0x25
#define RFCfgReg 0x26
#define GsNReg 0x27
#define CWGsCfgReg 0x28
#define ModGsCfgReg 0x29
#define TModeReg 0x2A
#define TPrescalerReg 0x2B
#define TReloadRegH 0x2C
#define TReloadRegL 0x2D
#define TCounterValueRegH 0x2E
#define TCounterValueRegL 0x2F
// PAGE 3
#define RFU30 0x30
#define TestSel1Reg 0x31
#define TestSel2Reg 0x32
#define TestPinEnReg 0x33
#define TestPinValueReg 0x34
#define TestBusReg 0x35
#define AutoTestReg 0x36
#define VersionReg 0x37
#define AnalogTestReg 0x38
#define TestDAC1Reg 0x39
#define TestDAC2Reg 0x3A
#define TestADCReg 0x3B
#define RFU3C 0x3C
#define RFU3D 0x3D
#define RFU3E 0x3E
#define RFU3F 0x3F
/
//和MF522通訊時回傳的錯誤代碼
/
#define MI_OK 0
#define MI_NOTAGERR (1)
#define MI_ERR (2)
#define SHAQU1 0X01
#define KUAI4 0X04
#define KUAI7 0X07
#define REGCARD 0xa1
#define CONSUME 0xa2
#define READCARD 0xa3
#define ADDMONEY 0xa4
//
//#define spi_cs 1;
//sbit spi_ck=P0^6;
//sbit spi_mosi=P0^7;
//sbit spi_miso=P4^1;
//sbit spi_rst=P2^7;
#define SPIReadByte() SPIWriteByte(0)
u8 SPIWriteByte(u8 byte);
void SPI1_Init(void);
//void SPI2_Init(void);
#define SET_SPI_CS (GPIOF->BSRR=0X01)
#define CLR_SPI_CS (GPIOF->BRR=0X01)
#define SET_RC522RST GPIOF->BSRR=0X02
#define CLR_RC522RST GPIOF->BRR=0X02
/***********************RC522 函式宏定義**********************/
#define RC522_CS_Enable() GPIO_ResetBits ( GPIOA, GPIO_Pin_4 )
#define RC522_CS_Disable() GPIO_SetBits ( GPIOA, GPIO_Pin_4 )
#define RC522_Reset_Enable() GPIO_ResetBits( GPIOB, GPIO_Pin_0 )
#define RC522_Reset_Disable() GPIO_SetBits ( GPIOB, GPIO_Pin_0 )
#define RC522_SCK_0() GPIO_ResetBits( GPIOA, GPIO_Pin_5 )
#define RC522_SCK_1() GPIO_SetBits ( GPIOA, GPIO_Pin_5 )
#define RC522_MOSI_0() GPIO_ResetBits( GPIOA, GPIO_Pin_7 )
#define RC522_MOSI_1() GPIO_SetBits ( GPIOA, GPIO_Pin_7 )
#define RC522_MISO_GET() GPIO_ReadInputDataBit ( GPIOA, GPIO_Pin_6 )
void RC522_Handle (void); // 測驗程式0,完成addr讀寫讀
void RC522_Handle1 (void); // 測驗程式1,完成0x0F塊 驗證KEY_A、KEY_B 讀 寫RFID1 驗證KEY_A1、KEY_B1 讀 寫RFID2
void RC522_data_break (void); // 測驗用資料爆破程式,僅供學習參考,請勿非法使用
void RC522_Init ( void ); //初始化
void PcdReset ( void ); //復位
void M500PcdConfigISOType ( u8 type ); //作業方式
char PcdRequest ( u8 req_code, u8 * pTagType ); //尋卡
char PcdAnticoll ( u8 * pSnr); //讀卡號
char PcdSelect ( u8 * pSnr );
char PcdAuthState ( u8 ucAuth_mode, u8 ucAddr, u8 * pKey, u8 * pSnr );
char PcdWrite ( u8 ucAddr, u8 * pData );
char PcdRead ( u8 ucAddr, u8 * pData );
void ShowID(u8 *p); //顯示卡的卡號,以十六進制顯示
extern char* POINT_LNG;
extern char* POINT_LAT;
extern char* POINT_LNG_ON;
extern char* POINT_LAT_ON;
extern char* POINT_LNG_OFF;
extern char* POINT_LAT_OFF;
#endif
rc522.c
#include "sys.h"
#include "rc522.h"
#include "delay.h"
#include "usart.h"
#include "string.h"
//
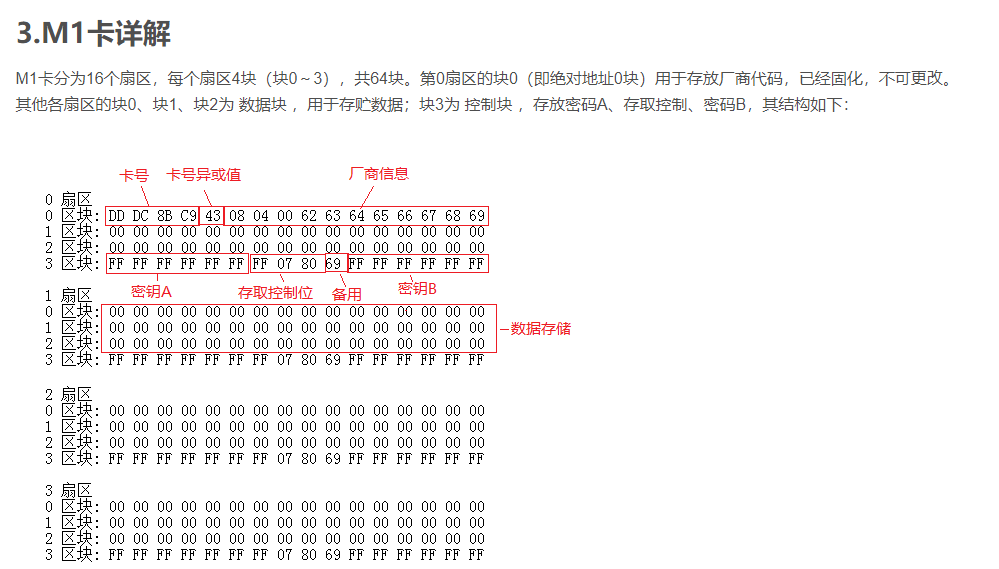
// M1卡分為16個扇區,每個扇區由四個塊(塊0、塊1、塊2、塊3)組成
// 將16個扇區的64個塊按絕對地址編號為:0~63
// 第0個扇區的塊0(即絕對地址0塊),用于存放廠商代碼,已經固化不可更改
// 每個扇區的塊0、塊1、塊2為資料塊,可用于存放資料
// 每個扇區的塊3為控制塊(絕對地址為:塊3、塊7、塊11.....)包括密碼A,存取控制、密碼B等
/*******************************
*連線說明:
*1--SDA <----->PA4
*2--SCK <----->PA5
*3--MOSI <----->PA7
*4--MISO <----->PA6
*5--懸空
*6--GND <----->GND
*7--RST <----->PB0
*8--VCC <----->VCC
************************************/
/*全域變數*/
unsigned char CT[2];//卡型別
unsigned char SN[4]; //卡號
unsigned char DATA[16]; //存放資料
unsigned char RFID[16]; //存放RFID
unsigned char card0_bit=0;
unsigned char card1_bit=0;
unsigned char card2_bit=0;
unsigned char card3_bit=0;
unsigned char card4_bit=0;
unsigned char total=0;
// 這UID定義在這不知道干啥用的,,, 替換成自己卡的UID
unsigned char card_0[4]= {73,224,5,152};
unsigned char card_1[4]= {105,102,100,152};
unsigned char card_2[4]= {208,121,31,57};
unsigned char card_3[4]= {176,177,143,165};
unsigned char card_4[4]= {5,158,10,136};
u8 KEY_A[6]= {0xff,0xff,0xff,0xff,0xff,0xff};
u8 KEY_B[6]= {0xff,0xff,0xff,0xff,0xff,0xff};
u8 AUDIO_OPEN[6] = {0xAA, 0x07, 0x02, 0x00, 0x09, 0xBC};
// 測驗用 3區塊資料
unsigned char RFID1[16]= {0x10,0x20,0x30,0x40,0x50,0x60,0xff,0x07,0x80,0x29,0x01,0x02,0x03,0x04,0x05,0x06};
unsigned char RFID2[16]= {0xff,0xff,0xff,0xff,0xff,0xff,0xff,0x07,0x80,0x29,0xff,0xff,0xff,0xff,0xff,0xff};
// 測驗用 3區塊密鑰
u8 KEY_A1[6]= {0x10,0x20,0x30,0x40,0x50,0x60};
u8 KEY_A2[6]= {0x00,0x00,0x00,0x00,0x00,0x00};
u8 KEY_B1[6]= {0x01,0x02,0x03,0x04,0x05,0x06};
u8 KEY_B2[6]= {0x10,0x20,0x30,0x00,0x00,0x00};
u8 KEY_B3[6]= {0x01,0x02,0x03,0x00,0x00,0x00};
// 置零用
unsigned char DATA0[16]= {0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00};
unsigned char DATA1[16]= {0x12,0x34,0x56,0x78,0x9A,0x00,0xff,0x07,0x80,0x29,0xff,0xff,0xff,0xff,0xff,0xff};
unsigned char status;
// 0x08 就是2扇區0區塊(即第9塊)
unsigned char addr=0x08;
// unsigned char addr=0x08;
#define RC522_DELAY() delay_us( 20 )
// 測驗程式0,完成addr讀寫讀
void RC522_Handle(void)
{
u8 i = 0;
status = PcdRequest(PICC_REQALL,CT);//尋卡
// printf("\r\nstatus>>>>>>%d\r\n", status);
if(status==MI_OK)// 尋卡成功
{
status=MI_ERR;
status = PcdAnticoll(SN);// 防沖撞 獲得UID 存入SN
}
if (status==MI_OK)// 防沖撞成功
{
status = MI_ERR;
ShowID(SN); // 串口列印卡的ID號 UID
// 難道就是為了做個判斷嗎,,,
if((SN[0]==card_0[0])&&(SN[1]==card_0[1])&&(SN[2]==card_0[2])&&(SN[3]==card_0[3]))
{
card0_bit=1;
printf("\r\nThe User is:card_0\r\n");
}
if((SN[0]==card_1[0])&&(SN[1]==card_1[1])&&(SN[2]==card_1[2])&&(SN[3]==card_1[3]))
{
card1_bit=1;
printf("\r\nThe User is:card_1\r\n");
}
if((SN[0]==card_2[0])&&(SN[1]==card_2[1])&&(SN[2]==card_2[2])&&(SN[3]==card_2[3]))
{
card2_bit=1;
printf("\r\nThe User is:card_2\r\n");
}
if((SN[0]==card_3[0])&&(SN[1]==card_3[1])&&(SN[2]==card_3[2])&&(SN[3]==card_3[3]))
{
card3_bit=1;
printf("\r\nThe User is:card_3\r\n");
}
if((SN[0]==card_4[0])&&(SN[1]==card_4[1])&&(SN[2]==card_4[2])&&(SN[3]==card_4[3]))
{
card4_bit=1;
printf("\r\nThe User is:card_4\r\n");
}
//total = card1_bit+card2_bit+card3_bit+card4_bit+card0_bit;
status = PcdSelect(SN);
}
else
{
}
if(status == MI_OK)//選卡成功
{
status = MI_ERR;
// 驗證A密鑰 塊地址 密碼 SN
// 注意:此處的塊地址0x0B即2扇區3區塊,此塊地址只需要指向某一扇區就可以了,即2扇區為0x08-0x0B這個范圍都有效,且只能對驗證過的扇區進行讀寫操作
status = PcdAuthState(0x60, 0x0B, KEY_A, SN);
if(status == MI_OK)//驗證成功
{
printf("PcdAuthState(A) success\r\n");
}
else
{
printf("PcdAuthState(A) failed\r\n");
}
// 驗證B密鑰 塊地址 密碼 SN
status = PcdAuthState(0x61, 0x0B, KEY_B, SN);
if(status == MI_OK)//驗證成功
{
printf("PcdAuthState(B) success\r\n");
}
else
{
printf("PcdAuthState(B) failed\r\n");
}
}
if(status == MI_OK)//驗證成功
{
status = MI_ERR;
// 讀取M1卡一塊資料 塊地址 讀取的資料 注意:因為上面驗證的扇區是2扇區,所以只能對2扇區的資料進行讀寫,即0x08-0x0B這個范圍,超出范圍讀取失敗,
status = PcdRead(addr, DATA);
if(status == MI_OK)//讀卡成功
{
// printf("RFID:%s\r\n", RFID);
printf("DATA:");
for(i = 0; i < 16; i++)
{
printf("%02x", DATA[i]);
}
printf("\r\n");
}
else
{
printf("PcdRead() failed\r\n");
}
}
if(status == MI_OK)//讀卡成功
{
status = MI_ERR;
printf("Write the card after 1 second. Do not move the card!!!\r\n");
delay_ms(1000);
// status = PcdWrite(addr, DATA0);
// 寫資料到M1卡一塊
status = PcdWrite(addr, DATA1);
if(status == MI_OK)//寫卡成功
{
printf("PcdWrite() success\r\n");
}
else
{
printf("PcdWrite() failed\r\n");
delay_ms(3000);
}
}
if(status == MI_OK)//寫卡成功
{
status = MI_ERR;
// 讀取M1卡一塊資料 塊地址 讀取的資料
status = PcdRead(addr, DATA);
if(status == MI_OK)//讀卡成功
{
// printf("DATA:%s\r\n", DATA);
printf("DATA:");
for(i = 0; i < 16; i++)
{
printf("%02x", DATA[i]);
}
printf("\r\n");
}
else
{
printf("PcdRead() failed\r\n");
}
}
if(status == MI_OK)//讀卡成功
{
status = MI_ERR;
printf("RC522_Handle() run finished after 1 second!\r\n");
delay_ms(1000);
}
}
// 測驗程式1,完成0x0F塊 驗證KEY_A、KEY_B 讀 寫RFID1 驗證KEY_A1、KEY_B1 讀 寫RFID2
void RC522_Handle1(void)
{
u8 i = 0;
unsigned char test_addr=0x0F;
status = PcdRequest(PICC_REQALL,CT);//尋卡
// printf("\r\nstatus>>>>>>%d\r\n", status);
if(status==MI_OK)// 尋卡成功
{
status=MI_ERR;
status = PcdAnticoll(SN);// 防沖撞 獲得UID 存入SN
}
if (status==MI_OK)// 防沖撞成功
{
status = MI_ERR;
ShowID(SN); // 串口列印卡的ID號 UID
// 難道就是為了做個判斷嗎,,,
if((SN[0]==card_0[0])&&(SN[1]==card_0[1])&&(SN[2]==card_0[2])&&(SN[3]==card_0[3]))
{
card0_bit=1;
printf("\r\nThe User is:card_0\r\n");
}
if((SN[0]==card_1[0])&&(SN[1]==card_1[1])&&(SN[2]==card_1[2])&&(SN[3]==card_1[3]))
{
card1_bit=1;
printf("\r\nThe User is:card_1\r\n");
}
status = PcdSelect(SN);
}
else
{
}
if(status == MI_OK)//選卡成功
{
status = MI_ERR;
// 驗證A密鑰 塊地址 密碼 SN
// 注意:此處的塊地址0x0F即3扇區3區塊,此塊地址只需要指向某一扇區就可以了,即3扇區為0x0C-0x0F這個范圍都有效,且只能對驗證過的扇區進行讀寫操作
status = PcdAuthState(0x60, test_addr, KEY_A, SN);
if(status == MI_OK)//驗證成功
{
printf("PcdAuthState(A) success\r\n");
}
else
{
printf("PcdAuthState(A) failed\r\n");
status = MI_OK;
goto P1;
}
// 驗證B密鑰 塊地址 密碼 SN
status = PcdAuthState(0x61, test_addr, KEY_B, SN);
if(status == MI_OK)//驗證成功
{
printf("PcdAuthState(B) success\r\n");
}
else
{
printf("PcdAuthState(B) failed\r\n");
}
}
if(status == MI_OK)//驗證成功
{
status = MI_ERR;
// 讀取M1卡一塊資料 塊地址 讀取的資料 注意:因為上面驗證的扇區是3扇區,所以只能對2扇區的資料進行讀寫,即0x0C-0x0F這個范圍,超出范圍讀取失敗,
status = PcdRead(test_addr, DATA);
if(status == MI_OK)//讀卡成功
{
// printf("RFID:%s\r\n", RFID);
printf("DATA:");
for(i = 0; i < 16; i++)
{
printf("%02x", DATA[i]);
}
printf("\r\n");
}
else
{
printf("PcdRead() failed\r\n");
}
}
if(status == MI_OK)//讀卡成功
{
status = MI_ERR;
// 寫資料到M1卡一塊
status = PcdWrite(test_addr, RFID1);
if(status == MI_OK)//寫卡成功
{
printf("PcdWrite(RFID1) success\r\n");
}
else
{
printf("PcdWrite(RFID1) failed\r\n");
delay_ms(3000);
}
}
P1:
if(status == MI_OK)//寫卡成功
{
status = MI_ERR;
// 驗證A密鑰 塊地址 密碼 SN
// 注意:此處的塊地址0x0F即3扇區3區塊,此塊地址只需要指向某一扇區就可以了,即3扇區為0x0C-0x0F這個范圍都有效,且只能對驗證過的扇區進行讀寫操作
status = PcdAuthState(0x60, test_addr, KEY_A1, SN);
if(status == MI_OK)//驗證成功
{
printf("PcdAuthState(A1) success\r\n");
}
else
{
printf("PcdAuthState(A1) failed\r\n");
}
// 驗證B密鑰 塊地址 密碼 SN
status = PcdAuthState(0x61, test_addr, KEY_B1, SN);
if(status == MI_OK)//驗證成功
{
printf("PcdAuthState(B1) success\r\n");
}
else
{
printf("PcdAuthState(B1) failed\r\n");
}
}
if(status == MI_OK)//驗證成功
{
status = MI_ERR;
// 讀取M1卡一塊資料 塊地址 讀取的資料 注意:因為上面驗證的扇區是3扇區,所以只能對2扇區的資料進行讀寫,即0x0C-0x0F這個范圍,超出范圍讀取失敗,
status = PcdRead(test_addr, DATA);
if(status == MI_OK)//讀卡成功
{
// printf("RFID:%s\r\n", RFID);
printf("DATA:");
for(i = 0; i < 16; i++)
{
printf("%02x", DATA[i]);
}
printf("\r\n");
}
else
{
printf("PcdRead() failed\r\n");
}
}
if(status == MI_OK)//讀卡成功
{
status = MI_ERR;
// 寫資料到M1卡一塊
status = PcdWrite(test_addr, RFID2);
if(status == MI_OK)//寫卡成功
{
printf("PcdWrite(RFID2) success\r\n");
}
else
{
printf("PcdWrite(RFID2) failed\r\n");
delay_ms(3000);
}
}
if(status == MI_OK)//寫卡成功
{
status = MI_ERR;
// 讀取M1卡一塊資料 塊地址 讀取的資料
status = PcdRead(test_addr, DATA);
if(status == MI_OK)//讀卡成功
{
// printf("DATA:%s\r\n", DATA);
printf("DATA:");
for(i = 0; i < 16; i++)
{
printf("%02x", DATA[i]);
}
printf("\r\n");
}
else
{
printf("PcdRead() failed\r\n");
}
}
if(status == MI_OK)//讀卡成功
{
status = MI_ERR;
printf("RC522_Handle1() run finished after 1 second!\r\n");
delay_ms(1000);
}
}
// 測驗用資料爆破程式,僅供學習參考,請勿非法使用 針對card_0進行破解
void RC522_data_break(void)
{
// 爆破的塊地址
unsigned char break_addr = 0x0F;
u8 i = 0;
/*
u8 key_arr[257] = { 0x00, 0x01, 0x02, 0x03, 0x04, 0x05, 0x06, 0x07, 0x08, 0x09, 0x0A, 0x0B, 0x0C, 0x0D, 0x0E, 0x0F,
0x10, 0x11, 0x12, 0x13, 0x14, 0x15, 0x16, 0x17, 0x18, 0x19, 0x1A, 0x1B, 0x1C, 0x1D, 0x1E, 0x1F,
0x20, 0x21, 0x22, 0x23, 0x24, 0x25, 0x26, 0x27, 0x28, 0x29, 0x2A, 0x2B, 0x2C, 0x2D, 0x2E, 0x2F,
0x30, 0x31, 0x32, 0x33, 0x34, 0x35, 0x36, 0x37, 0x38, 0x39, 0x3A, 0x3B, 0x3C, 0x3D, 0x3E, 0x3F,
0x40, 0x41, 0x42, 0x43, 0x44, 0x45, 0x46, 0x47, 0x48, 0x49, 0x4A, 0x4B, 0x4C, 0x4D, 0x4E, 0x4F,
0x50, 0x51, 0x52, 0x53, 0x54, 0x55, 0x56, 0x57, 0x58, 0x59, 0x5A, 0x5B, 0x5C, 0x5D, 0x5E, 0x5F,
0x60, 0x61, 0x62, 0x63, 0x64, 0x65, 0x66, 0x67, 0x68, 0x69, 0x6A, 0x6B, 0x6C, 0x6D, 0x6E, 0x6F,
0x70, 0x71, 0x72, 0x73, 0x74, 0x75, 0x76, 0x77, 0x78, 0x79, 0x7A, 0x7B, 0x7C, 0x7D, 0x7E, 0x7F,
0x80, 0x81, 0x82, 0x83, 0x84, 0x85, 0x86, 0x87, 0x88, 0x89, 0x8A, 0x8B, 0x8C, 0x8D, 0x8E, 0x8F,
0x90, 0x91, 0x92, 0x93, 0x94, 0x95, 0x96, 0x97, 0x98, 0x99, 0x9A, 0x9B, 0x9C, 0x9D, 0x9E, 0x9F,
0xA0, 0xA1, 0xA2, 0xA3, 0xA4, 0xA5, 0xA6, 0xA7, 0xA8, 0xA9, 0xAA, 0xAB, 0xAC, 0xAD, 0xAE, 0xAF,
0xB0, 0xB1, 0xB2, 0xB3, 0xB4, 0xB5, 0xB6, 0xB7, 0xB8, 0xB9, 0xBA, 0xBB, 0xBC, 0xBD, 0xBE, 0xBF,
0xC0, 0xC1, 0xC2, 0xC3, 0xC4, 0xC5, 0xC6, 0xC7, 0xC8, 0xC9, 0xCA, 0xCB, 0xCC, 0xCD, 0xCE, 0xCF,
0xD0, 0xD1, 0xD2, 0xD3, 0xD4, 0xD5, 0xD6, 0xD7, 0xD8, 0xD9, 0xDA, 0xDB, 0xDC, 0xDD, 0xDE, 0xDF,
0xE0, 0xE1, 0xE2, 0xE3, 0xE4, 0xE5, 0xE6, 0xE7, 0xE8, 0xE9, 0xEA, 0xEB, 0xEC, 0xED, 0xEE, 0xEF,
0xF0, 0xF1, 0xF2, 0xF3, 0xF4, 0xF5, 0xF6, 0xF7, 0xF8, 0xF9, 0xFA, 0xFB, 0xFC, 0xFD, 0xFE, 0xFF };
*/
u8 break_KEY[6]= {0, 0, 0, 0, 0, 0};
status = PcdRequest(PICC_REQALL,CT);//尋卡
// printf("\r\nstatus>>>>>>%d\r\n", status);
if(status==MI_OK)// 尋卡成功
{
status=MI_ERR;
status = PcdAnticoll(SN);// 防沖撞 獲得UID 存入SN
}
if (status==MI_OK)// 防沖撞成功
{
status = MI_ERR;
ShowID(SN); // 串口列印卡的ID號 UID
// 難道就是為了做個判斷嗎,,,
if((SN[0]==card_0[0])&&(SN[1]==card_0[1])&&(SN[2]==card_0[2])&&(SN[3]==card_0[3]))
{
card0_bit=1;
printf("\r\nThe User is:card_0\r\n");
}
else
{
printf("\r\nThe User isn't:card_0\r\n");
return;
}
status = PcdSelect(SN);
}
else
{
}
if(status == MI_OK)//選卡成功
{
status = MI_ERR;
// 自由發揮 ,,,
// 驗證A密鑰 塊地址 密碼 SN
// 注意:此處的塊地址0x0F即3扇區3區塊,此塊地址只需要指向某一扇區就可以了,即3扇區為0x0C-0x0F這個范圍都有效,且只能對驗證過的扇區進行讀寫操作
status = PcdAuthState(0x60, break_addr, break_KEY, SN);
if(status == MI_OK)//驗證成功
{
printf("PcdAuthState(A) success\r\n");
}
else
{
printf("PcdAuthState(A) failed\r\n");
status = MI_OK;
}
// 驗證B密鑰 塊地址 密碼 SN
status = PcdAuthState(0x61, break_addr, break_KEY, SN);
if(status == MI_OK)//驗證成功
{
printf("PcdAuthState(B) success\r\n");
}
else
{
printf("PcdAuthState(B) failed\r\n");
}
}
if(status == MI_OK)//驗證成功
{
status = MI_ERR;
// 讀取M1卡一塊資料 塊地址 讀取的資料 注意:因為上面驗證的扇區是3扇區,所以只能對2扇區的資料進行讀寫,即0x0C-0x0F這個范圍,超出范圍讀取失敗,
status = PcdRead(break_addr, DATA);
if(status == MI_OK)//讀卡成功
{
// printf("RFID:%s\r\n", RFID);
printf("DATA:");
for(i = 0; i < 16; i++)
{
printf("%02x", DATA[i]);
}
printf("\r\n");
}
else
{
printf("PcdRead() failed\r\n");
}
}
delay_ms(3000);
}
void RC522_Init ( void )
{
SPI1_Init();
RC522_Reset_Disable();
RC522_CS_Disable();
PcdReset ();
M500PcdConfigISOType ( 'A' );//設定作業方式
}
void SPI1_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
SPI_InitTypeDef SPI_InitStructure;
RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOA | RCC_APB2Periph_GPIOB, ENABLE );//PORTA、B時鐘使能
RCC_APB1PeriphClockCmd( RCC_APB2Periph_SPI1, ENABLE ); //SPI1時鐘使能
// CS
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽輸出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //IO口速度為50MHz
GPIO_Init(GPIOA, &GPIO_InitStructure); //根據設定引數初始化PF0、PF1
// SCK
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽輸出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //IO口速度為50MHz
GPIO_Init(GPIOA, &GPIO_InitStructure);
// MISO
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; //推挽輸出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //IO口速度為50MHz
GPIO_Init(GPIOA, &GPIO_InitStructure);
// MOSI
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_7;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽輸出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //IO口速度為50MHz
GPIO_Init(GPIOA, &GPIO_InitStructure);
// RST
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽輸出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //IO口速度為50MHz
GPIO_Init(GPIOB, &GPIO_InitStructure);
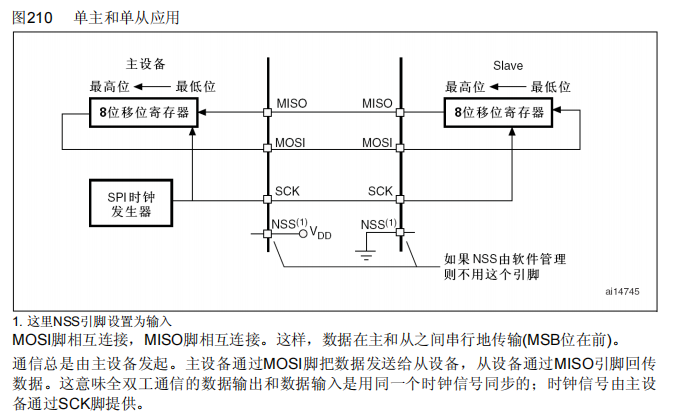
SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex; //設定SPI單向或者雙向的資料模式:SPI設定為雙線雙向全雙工
SPI_InitStructure.SPI_Mode = SPI_Mode_Master; //設定SPI作業模式:設定為主SPI
SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b; //設定SPI的資料大小:SPI發送接收8位幀結構
SPI_InitStructure.SPI_CPOL = SPI_CPOL_High; //串行同步時鐘的空閑狀態為高電平
// SPI_InitStructure.SPI_CPOL = SPI_CPOL_Low;
// SPI_InitStructure.SPI_CPHA = SPI_CPHA_1Edge; //串行同步時鐘的第一個跳變沿(下降)資料被采樣
SPI_InitStructure.SPI_CPHA = SPI_CPHA_2Edge; //串行同步時鐘的第二個跳變沿(上升)資料被采樣
SPI_InitStructure.SPI_NSS = SPI_NSS_Soft; //NSS信號由硬體(NSS管腳)還是軟體(使用SSI位)管理:內部NSS信號有SSI位控制
// RC522 SPI通訊時鐘周期最小為100ns 即頻率最大為10MHZ
// RC522 資料在下降沿變化
SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_256; //定義波特率預分頻的值:波特率預分頻值為256、傳輸速率36M/256=140.625KHz
SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB; //指定資料傳輸從MSB位還是LSB位開始:資料傳輸從MSB位開始
SPI_InitStructure.SPI_CRCPolynomial = 7; //CRC值計算的多項式
SPI_Init(SPI1, &SPI_InitStructure); //根據SPI_InitStruct中指定的引數初始化外設SPIx暫存器
SPI_Cmd(SPI1, ENABLE); //使能SPI外設
}
/*
* 函式名:SPI_RC522_SendByte
* 描述 :向RC522發送1 Byte 資料
* 輸入 :byte,要發送的資料
* 回傳 : RC522回傳的資料
* 呼叫 :內部呼叫
*/
void SPI_RC522_SendByte ( u8 byte )
{
u8 counter;
for(counter=0; counter<8; counter++)
{
if ( byte & 0x80 )
RC522_MOSI_1 ();
else
RC522_MOSI_0 ();
RC522_DELAY();
RC522_SCK_0 ();
RC522_DELAY();
RC522_SCK_1();
RC522_DELAY();
byte <<= 1;
}
}
/*
* 函式名:SPI_RC522_ReadByte
* 描述 :從RC522發送1 Byte 資料
* 輸入 :無
* 回傳 : RC522回傳的資料
* 呼叫 :內部呼叫
*/
u8 SPI_RC522_ReadByte ( void )
{
u8 counter;
u8 SPI_Data;
for(counter=0; counter<8; counter++)
{
SPI_Data <<= 1;
RC522_SCK_0 ();
RC522_DELAY();
if ( RC522_MISO_GET() == 1)
SPI_Data |= 0x01;
RC522_DELAY();
RC522_SCK_1 ();
RC522_DELAY();
}
// printf("****%c****",SPI_Data);
return SPI_Data;
}
/*
* 函式名:ReadRawRC
* 描述 :讀RC522暫存器
* 輸入 :ucAddress,暫存器地址
* 回傳 : 暫存器的當前值
* 呼叫 :內部呼叫
*/
u8 ReadRawRC ( u8 ucAddress )
{
u8 ucAddr, ucReturn;
ucAddr = ( ( ucAddress << 1 ) & 0x7E ) | 0x80;
RC522_CS_Enable();
SPI_RC522_SendByte ( ucAddr );
ucReturn = SPI_RC522_ReadByte ();
RC522_CS_Disable();
return ucReturn;
}
/*
* 函式名:WriteRawRC
* 描述 :寫RC522暫存器
* 輸入 :ucAddress,暫存器地址
* ucValue,寫入暫存器的值
* 回傳 : 無
* 呼叫 :內部呼叫
*/
void WriteRawRC ( u8 ucAddress, u8 ucValue )
{
u8 ucAddr;
ucAddr = ( ucAddress << 1 ) & 0x7E;
RC522_CS_Enable();
SPI_RC522_SendByte ( ucAddr );
SPI_RC522_SendByte ( ucValue );
RC522_CS_Disable();
}
/*
* 函式名:SetBitMask
* 描述 :對RC522暫存器置位
* 輸入 :ucReg,暫存器地址
* ucMask,置位值
* 回傳 : 無
* 呼叫 :內部呼叫
*/
void SetBitMask ( u8 ucReg, u8 ucMask )
{
u8 ucTemp;
ucTemp = ReadRawRC ( ucReg );
WriteRawRC ( ucReg, ucTemp | ucMask ); // set bit mask
}
/*
* 函式名:ClearBitMask
* 描述 :對RC522暫存器清位
* 輸入 :ucReg,暫存器地址
* ucMask,清位值
* 回傳 : 無
* 呼叫 :內部呼叫
*/
void ClearBitMask ( u8 ucReg, u8 ucMask )
{
u8 ucTemp;
ucTemp = ReadRawRC ( ucReg );
WriteRawRC ( ucReg, ucTemp & ( ~ ucMask) ); // clear bit mask
}
/*
* 函式名:PcdAntennaOn
* 描述 :開啟天線
* 輸入 :無
* 回傳 : 無
* 呼叫 :內部呼叫
*/
void PcdAntennaOn ( void )
{
u8 uc;
uc = ReadRawRC ( TxControlReg );
if ( ! ( uc & 0x03 ) )
SetBitMask(TxControlReg, 0x03);
}
/*
* 函式名:PcdAntennaOff
* 描述 :開啟天線
* 輸入 :無
* 回傳 : 無
* 呼叫 :內部呼叫
*/
void PcdAntennaOff ( void )
{
ClearBitMask ( TxControlReg, 0x03 );
}
/*
* 函式名:PcdRese
* 描述 :復位RC522
* 輸入 :無
* 回傳 : 無
* 呼叫 :外部呼叫
*/
void PcdReset ( void )
{
RC522_Reset_Disable();
delay_us ( 1 );
RC522_Reset_Enable();
delay_us ( 1 );
RC522_Reset_Disable();
delay_us ( 1 );
WriteRawRC ( CommandReg, 0x0f );
while ( ReadRawRC ( CommandReg ) & 0x10 );
delay_us ( 1 );
WriteRawRC ( ModeReg, 0x3D ); //定義發送和接收常用模式 和Mifare卡通訊,CRC初始值0x6363
WriteRawRC ( TReloadRegL, 30 ); //16位定時器低位
WriteRawRC ( TReloadRegH, 0 ); //16位定時器高位
WriteRawRC ( TModeReg, 0x8D ); //定義內部定時器的設定
WriteRawRC ( TPrescalerReg, 0x3E ); //設定定時器分頻系數
WriteRawRC ( TxAutoReg, 0x40 ); //調制發送信號為100%ASK
}
/*
* 函式名:M500PcdConfigISOType
* 描述 :設定RC522的作業方式
* 輸入 :ucType,作業方式
* 回傳 : 無
* 呼叫 :外部呼叫
*/
void M500PcdConfigISOType ( u8 ucType )
{
if ( ucType == 'A') //ISO14443_A
{
ClearBitMask ( Status2Reg, 0x08 );
WriteRawRC ( ModeReg, 0x3D );//3F
WriteRawRC ( RxSelReg, 0x86 );//84
WriteRawRC( RFCfgReg, 0x7F ); //4F
WriteRawRC( TReloadRegL, 30 );//tmoLength);// TReloadVal = 'h6a =tmoLength(dec)
WriteRawRC ( TReloadRegH, 0 );
WriteRawRC ( TModeReg, 0x8D );
WriteRawRC ( TPrescalerReg, 0x3E );
delay_us ( 2 );
PcdAntennaOn ();//開天線
}
}
/*
* 函式名:PcdComMF522
* 描述 :通過RC522和ISO14443卡通訊
* 輸入 :ucCommand,RC522命令字
* pInData,通過RC522發送到卡片的資料
* ucInLenByte,發送資料的位元組長度
* pOutData,接收到的卡片回傳資料
* pOutLenBit,回傳資料的位長度
* 回傳 : 狀態值
* = MI_OK,成功
* 呼叫 :內部呼叫
*/
char PcdComMF522 ( u8 ucCommand, u8 * pInData, u8 ucInLenByte, u8 * pOutData, u32 * pOutLenBit )
{
char cStatus = MI_ERR;
u8 ucIrqEn = 0x00;
u8 ucWaitFor = 0x00;
u8 ucLastBits;
u8 ucN;
u32 ul;
switch ( ucCommand )
{
case PCD_AUTHENT: //Mifare認證
ucIrqEn = 0x12; //允許錯誤中斷請求ErrIEn 允許空閑中斷IdleIEn
ucWaitFor = 0x10; //認證尋卡等待時候 查詢空閑中斷標志位
break;
case PCD_TRANSCEIVE: //接收發送 發送接收
ucIrqEn = 0x77; //允許TxIEn RxIEn IdleIEn LoAlertIEn ErrIEn TimerIEn
ucWaitFor = 0x30; //尋卡等待時候 查詢接收中斷標志位與 空閑中斷標志位
break;
default:
break;
}
WriteRawRC ( ComIEnReg, ucIrqEn | 0x80 ); //IRqInv置位管腳IRQ與Status1Reg的IRq位的值相反
ClearBitMask ( ComIrqReg, 0x80 ); //Set1該位清零時,CommIRqReg的屏蔽位清零
WriteRawRC ( CommandReg, PCD_IDLE ); //寫空閑命令
SetBitMask ( FIFOLevelReg, 0x80 ); //置位FlushBuffer清除內部FIFO的讀和寫指標以及ErrReg的BufferOvfl標志位被清除
for ( ul = 0; ul < ucInLenByte; ul ++ )
WriteRawRC ( FIFODataReg, pInData [ ul ] ); //寫資料進FIFOdata
WriteRawRC ( CommandReg, ucCommand ); //寫命令
if ( ucCommand == PCD_TRANSCEIVE )
SetBitMask(BitFramingReg,0x80); //StartSend置位啟動資料發送 該位與收發命令使用時才有效
ul = 1000;//根據時鐘頻率調整,操作M1卡最大等待時間25ms
do //認證 與尋卡等待時間
{
ucN = ReadRawRC ( ComIrqReg ); //查詢事件中斷
ul --;
} while ( ( ul != 0 ) && ( ! ( ucN & 0x01 ) ) && ( ! ( ucN & ucWaitFor ) ) ); //退出條件i=0,定時器中斷,與寫空閑命令
ClearBitMask ( BitFramingReg, 0x80 ); //清理允許StartSend位
if ( ul != 0 )
{
if ( ! (( ReadRawRC ( ErrorReg ) & 0x1B )) ) //讀錯誤標志暫存器BufferOfI CollErr ParityErr ProtocolErr
{
cStatus = MI_OK;
if ( ucN & ucIrqEn & 0x01 ) //是否發生定時器中斷
cStatus = MI_NOTAGERR;
if ( ucCommand == PCD_TRANSCEIVE )
{
ucN = ReadRawRC ( FIFOLevelReg ); //讀FIFO中保存的位元組數
ucLastBits = ReadRawRC ( ControlReg ) & 0x07; //最后接收到得位元組的有效位數
if ( ucLastBits )
* pOutLenBit = ( ucN - 1 ) * 8 + ucLastBits; //N個位元組數減去1(最后一個位元組)+最后一位的位數 讀取到的資料總位數
else
* pOutLenBit = ucN * 8; //最后接收到的位元組整個位元組有效
if ( ucN == 0 )
ucN = 1;
if ( ucN > MAXRLEN )
ucN = MAXRLEN;
for ( ul = 0; ul < ucN; ul ++ )
pOutData [ ul ] = ReadRawRC ( FIFODataReg );
}
}
else
cStatus = MI_ERR;
// printf(ErrorReg);
}
SetBitMask ( ControlReg, 0x80 ); // stop timer now
WriteRawRC ( CommandReg, PCD_IDLE );
return cStatus;
}
/*
* 函式名:PcdRequest
* 描述 :尋卡
* 輸入 :ucReq_code,尋卡方式
* = 0x52,尋感應區內所有符合14443A標準的卡
* = 0x26,尋未進入休眠狀態的卡
* pTagType,卡片型別代碼
* = 0x4400,Mifare_UltraLight
* = 0x0400,Mifare_One(S50)
* = 0x0200,Mifare_One(S70)
* = 0x0800,Mifare_Pro(X))
* = 0x4403,Mifare_DESFire
* 回傳 : 狀態值
* = MI_OK,成功
* 呼叫 :外部呼叫
*/
char PcdRequest ( u8 ucReq_code, u8 * pTagType )
{
char cStatus;
u8 ucComMF522Buf [ MAXRLEN ];
u32 ulLen;
ClearBitMask ( Status2Reg, 0x08 ); //清理指示MIFARECyptol單元接通以及所有卡的資料通信被加密的情況
WriteRawRC ( BitFramingReg, 0x07 ); // 發送的最后一個位元組的 七位
SetBitMask ( TxControlReg, 0x03 ); //TX1,TX2管腳的輸出信號傳遞經發送調制的13.56的能量載波信號
ucComMF522Buf [ 0 ] = ucReq_code; //存入 卡片命令字
cStatus = PcdComMF522 ( PCD_TRANSCEIVE, ucComMF522Buf, 1, ucComMF522Buf, & ulLen ); //尋卡
if ( ( cStatus == MI_OK ) && ( ulLen == 0x10 ) ) //尋卡成功回傳卡型別
{
* pTagType = ucComMF522Buf [ 0 ];
* ( pTagType + 1 ) = ucComMF522Buf [ 1 ];
}
else
cStatus = MI_ERR;
return cStatus;
}
/*
* 函式名:PcdAnticoll
* 描述 :防沖撞
* 輸入 :pSnr,卡片序列號,4位元組
* 回傳 : 狀態值
* = MI_OK,成功
* 呼叫 :外部呼叫
*/
char PcdAnticoll ( u8 * pSnr )
{
char cStatus;
u8 uc, ucSnr_check = 0;
u8 ucComMF522Buf [ MAXRLEN ];
u32 ulLen;
ClearBitMask ( Status2Reg, 0x08 ); //清MFCryptol On位 只有成功執行MFAuthent命令后,該位才能置位
WriteRawRC ( BitFramingReg, 0x00); //清理暫存器 停止收發
ClearBitMask ( CollReg, 0x80 ); //清ValuesAfterColl所有接收的位在沖突后被清除
/*
參考ISO14443協議:https://blog.csdn.net/wowocpp/article/details/79910800
PCD 發送 SEL = ‘93’,NVB = ‘20’兩個位元組
迫使所有的在場的PICC發回完整的UID CLn作為應答,
*/
ucComMF522Buf [ 0 ] = 0x93; //卡片防沖突命令
ucComMF522Buf [ 1 ] = 0x20;
// 發送并接收資料 接收的資料存盤于ucComMF522Buf
cStatus = PcdComMF522 ( PCD_TRANSCEIVE, ucComMF522Buf, 2, ucComMF522Buf, & ulLen);//與卡片通信
if ( cStatus == MI_OK) //通信成功
{
// 收到的UID 存入pSnr
for ( uc = 0; uc < 4; uc ++ )
{
* ( pSnr + uc ) = ucComMF522Buf [ uc ]; //讀出UID
ucSnr_check ^= ucComMF522Buf [ uc ];
}
if ( ucSnr_check != ucComMF522Buf [ uc ] )
cStatus = MI_ERR;
}
SetBitMask ( CollReg, 0x80 );
return cStatus;
}
/*
* 函式名:CalulateCRC
* 描述 :用RC522計算CRC16
* 輸入 :pIndata,計算CRC16的陣列
* ucLen,計算CRC16的陣列位元組長度
* pOutData,存放計算結果存放的首地址
* 回傳 : 無
* 呼叫 :內部呼叫
*/
void CalulateCRC ( u8 * pIndata, u8 ucLen, u8 * pOutData )
{
u8 uc, ucN;
ClearBitMask(DivIrqReg, 0x04);
WriteRawRC(CommandReg, PCD_IDLE);
SetBitMask(FIFOLevelReg, 0x80);
for ( uc = 0; uc < ucLen; uc ++)
WriteRawRC ( FIFODataReg, * ( pIndata + uc ) );
WriteRawRC ( CommandReg, PCD_CALCCRC );
uc = 0xFF;
do
{
ucN = ReadRawRC ( DivIrqReg );
uc --;
} while ( ( uc != 0 ) && ! ( ucN & 0x04 ) );
pOutData [ 0 ] = ReadRawRC ( CRCResultRegL );
pOutData [ 1 ] = ReadRawRC ( CRCResultRegM );
}
/*
* 函式名:PcdSelect
* 描述 :選定卡片
* 輸入 :pSnr,卡片序列號,4位元組
* 回傳 : 狀態值
* = MI_OK,成功
* 呼叫 :外部呼叫
*/
char PcdSelect ( u8 * pSnr )
{
char cStatus;
u8 uc;
u8 ucComMF522Buf [ MAXRLEN ];
u32 ulLen;
// 防沖撞 0x93
ucComMF522Buf [ 0 ] = PICC_ANTICOLL1;
// 假設沒有沖突,PCD 指定NVB為70,此值表示PCD將發送完整的UID CLn,與40位UID CLn 匹配的PICC,以SAK作為應答
ucComMF522Buf [ 1 ] = 0x70;
ucComMF522Buf [ 6 ] = 0;
// 3 4 5 6位存放UID,第7位一直異或,,,
for ( uc = 0; uc < 4; uc ++ )
{
ucComMF522Buf [ uc + 2 ] = * ( pSnr + uc );
ucComMF522Buf [ 6 ] ^= * ( pSnr + uc );
}
// CRC(回圈冗余校驗)
CalulateCRC ( ucComMF522Buf, 7, & ucComMF522Buf [ 7 ] );
ClearBitMask ( Status2Reg, 0x08 );
// 發送并接收資料
cStatus = PcdComMF522 ( PCD_TRANSCEIVE, ucComMF522Buf, 9, ucComMF522Buf, & ulLen );
if ( ( cStatus == MI_OK ) && ( ulLen == 0x18 ) )
cStatus = MI_OK;
else
cStatus = MI_ERR;
return cStatus;
}
/*
* 函式名:PcdAuthState
* 描述 :驗證卡片密碼
* 輸入 :ucAuth_mode,密碼驗證模式
* = 0x60,驗證A密鑰
* = 0x61,驗證B密鑰
* u8 ucAddr,塊地址
* pKey,密碼
* pSnr,卡片序列號,4位元組
* 回傳 : 狀態值
* = MI_OK,成功
* 呼叫 :外部呼叫
*/
char PcdAuthState ( u8 ucAuth_mode, u8 ucAddr, u8 * pKey, u8 * pSnr )
{
char cStatus;
u8 uc, ucComMF522Buf [ MAXRLEN ];
u32 ulLen;
ucComMF522Buf [ 0 ] = ucAuth_mode;
ucComMF522Buf [ 1 ] = ucAddr;
for ( uc = 0; uc < 6; uc ++ )
ucComMF522Buf [ uc + 2 ] = * ( pKey + uc );
for ( uc = 0; uc < 6; uc ++ )
ucComMF522Buf [ uc + 8 ] = * ( pSnr + uc );
// printf("char PcdAuthState ( u8 ucAuth_mode, u8 ucAddr, u8 * pKey, u8 * pSnr )\r\n");
// printf("before PcdComMF522() ucComMF522Buf:%s\r\n", ucComMF522Buf);
// 驗證密鑰命令
cStatus = PcdComMF522 ( PCD_AUTHENT, ucComMF522Buf, 12, ucComMF522Buf, & ulLen );
// printf("after PcdComMF522() ucComMF522Buf:%s\r\n", ucComMF522Buf);
if ( ( cStatus != MI_OK ) || ( ! ( ReadRawRC ( Status2Reg ) & 0x08 ) ) )
{
// if(cStatus != MI_OK)
// printf("666") ;
// else
// printf("888");
cStatus = MI_ERR;
}
return cStatus;
}
/*
* 函式名:PcdWrite
* 描述 :寫資料到M1卡一塊
* 輸入 :u8 ucAddr,塊地址
* pData,寫入的資料,16位元組
* 回傳 : 狀態值
* = MI_OK,成功
* 呼叫 :外部呼叫
*/
char PcdWrite ( u8 ucAddr, u8 * pData )
{
char cStatus;
u8 uc, ucComMF522Buf [ MAXRLEN ];
u32 ulLen;
ucComMF522Buf [ 0 ] = PICC_WRITE;
ucComMF522Buf [ 1 ] = ucAddr;
CalulateCRC ( ucComMF522Buf, 2, & ucComMF522Buf [ 2 ] );
cStatus = PcdComMF522 ( PCD_TRANSCEIVE, ucComMF522Buf, 4, ucComMF522Buf, & ulLen );
if ( ( cStatus != MI_OK ) || ( ulLen != 4 ) || ( ( ucComMF522Buf [ 0 ] & 0x0F ) != 0x0A ) )
cStatus = MI_ERR;
if ( cStatus == MI_OK )
{
memcpy(ucComMF522Buf, pData, 16);
for ( uc = 0; uc < 16; uc ++ )
ucComMF522Buf [ uc ] = * ( pData + uc );
CalulateCRC ( ucComMF522Buf, 16, & ucComMF522Buf [ 16 ] );
cStatus = PcdComMF522 ( PCD_TRANSCEIVE, ucComMF522Buf, 18, ucComMF522Buf, & ulLen );
if ( ( cStatus != MI_OK ) || ( ulLen != 4 ) || ( ( ucComMF522Buf [ 0 ] & 0x0F ) != 0x0A ) )
cStatus = MI_ERR;
}
return cStatus;
}
/*
* 函式名:PcdRead
* 描述 :讀取M1卡一塊資料
* 輸入 :u8 ucAddr,塊地址
* pData,讀出的資料,16位元組
* 回傳 : 狀態值
* = MI_OK,成功
* 呼叫 :外部呼叫
*/
char PcdRead ( u8 ucAddr, u8 * pData )
{
char cStatus;
u8 uc, ucComMF522Buf [ MAXRLEN ];
u32 ulLen;
ucComMF522Buf [ 0 ] = PICC_READ;
ucComMF522Buf [ 1 ] = ucAddr;
CalulateCRC ( ucComMF522Buf, 2, & ucComMF522Buf [ 2 ] );
cStatus = PcdComMF522 ( PCD_TRANSCEIVE, ucComMF522Buf, 4, ucComMF522Buf, & ulLen );
if ( ( cStatus == MI_OK ) && ( ulLen == 0x90 ) )
{
for ( uc = 0; uc < 16; uc ++ )
* ( pData + uc ) = ucComMF522Buf [ uc ];
}
else
cStatus = MI_ERR;
return cStatus;
}
/*
* 函式名:PcdHalt
* 描述 :命令卡片進入休眠狀態
* 輸入 :無
* 回傳 : 狀態值
* = MI_OK,成功
* 呼叫 :外部呼叫
*/
char PcdHalt( void )
{
u8 ucComMF522Buf [ MAXRLEN ];
u32 ulLen;
ucComMF522Buf [ 0 ] = PICC_HALT;
ucComMF522Buf [ 1 ] = 0;
CalulateCRC ( ucComMF522Buf, 2, & ucComMF522Buf [ 2 ] );
PcdComMF522 ( PCD_TRANSCEIVE, ucComMF522Buf, 4, ucComMF522Buf, & ulLen );
return MI_OK;
}
void IC_CMT ( u8 * UID, u8 * KEY, u8 RW, u8 * Dat )
{
u8 ucArray_ID [ 4 ] = { 0 };//先后存放IC卡的型別和UID(IC卡序列號)
PcdRequest ( 0x52, ucArray_ID );//尋卡
PcdAnticoll ( ucArray_ID );//防沖撞
PcdSelect ( UID );//選定卡
PcdAuthState ( 0x60, 0x10, KEY, UID );//校驗
if ( RW )//讀寫選擇,1是讀,0是寫
PcdRead ( 0x10, Dat );
else
PcdWrite ( 0x10, Dat );
PcdHalt ();
}
// 顯示卡的卡號,以十六進制顯示
void ShowID(u8 *p)
{
u8 num[9];
u8 i;
for(i=0; i<4; i++)
{
num[i*2] = p[i] / 16;
num[i*2] > 9 ? (num[i*2] += '7') : (num[i*2] += '0');
num[i*2+1] = p[i] % 16;
num[i*2+1] > 9 ? (num[i*2+1] += '7') : (num[i*2+1] += '0');
}
num[8] = 0;
printf("ID>>>%s\r\n", num);
}
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/279333.html
標籤:其他
上一篇:《STM32從零開始學習歷程》——CAN通訊協議協議層
下一篇:性能優化篇之腳本策略