低功耗管理
很多應用場合對于空耗的要求很嚴格,比如可穿戴低功耗產品、物聯網低功耗產品等,一般MCU都有相應的低功耗模式,裸機開發時可以使用MCU的低功耗模式,FreeRTOS也提供了一個叫Tickless的低功耗模式,方便帶FreeRTOS作業系統的應用開發
1. 低功耗管理介紹
1.1 STM32低功耗模式
STM32本身就支持低功耗模式,以STM32F1為例,其有三種低功耗模式:睡眠(Sleep)模式、停止(Stop)模式、待機(Standby)模式
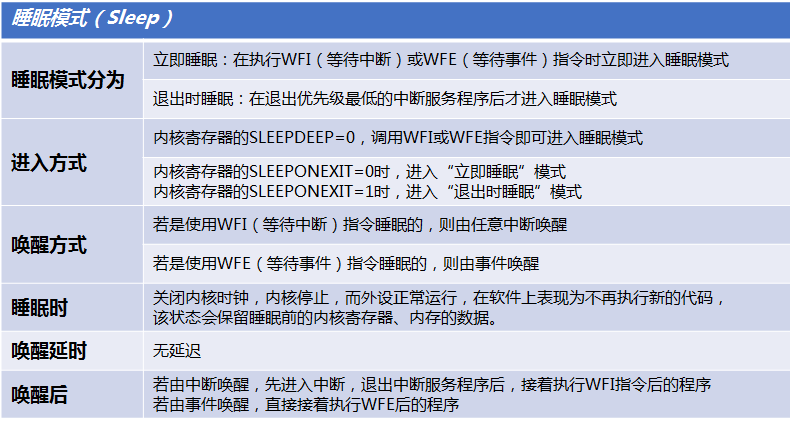
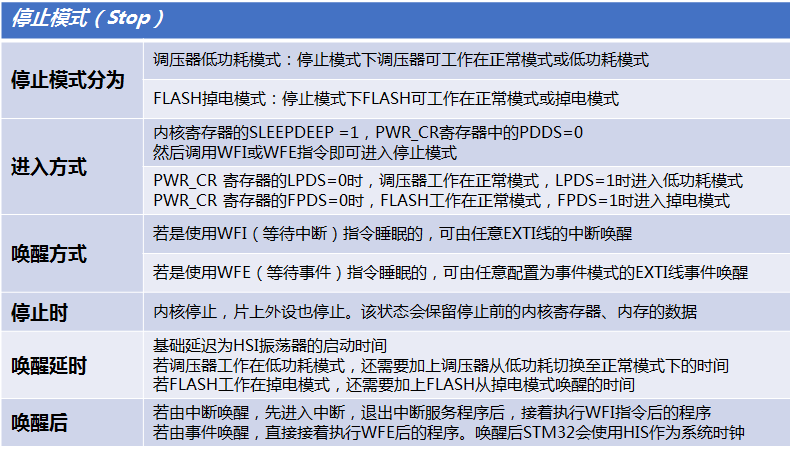
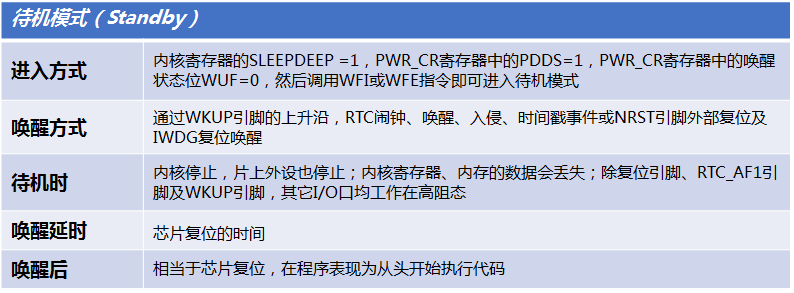
三種模式的對比如下圖示:

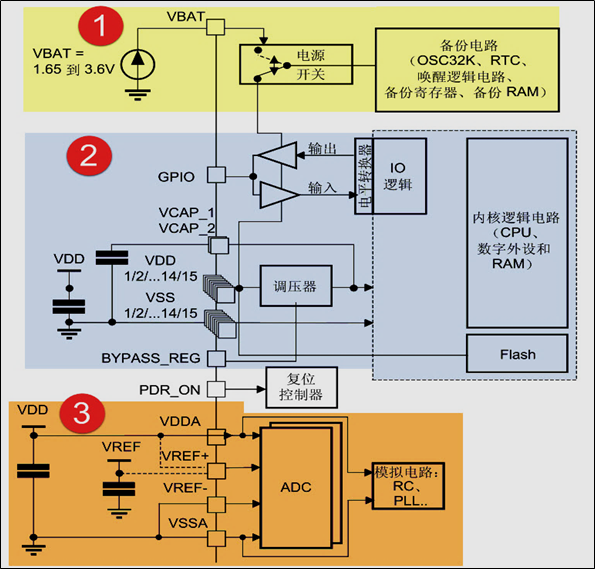
STM32的電源管理系統主要分為以下三個部分:1為備份域;2為調壓器供電電路;3為ADC電源電路
1.2 FreeRTOS Tickless低功耗模式
簡單應用中處理器大量的時間都在處理空閑任務,所以可以考慮當處理器處理空閑任務時進入低功耗模式,當需要處理應用層代碼時再將處理器從低功耗模式喚醒,一般采用基于時間片輪轉的搶占式任務調度機制的低功耗設計思路為:當idle任務運行時,進入低功耗模式;在適當的條件下,通過中斷或外部事件喚醒MCU
但是該設計的缺陷是每當OS系統定時器產生中斷時,也會將MCU從低功耗模式中喚醒,而頻繁的進入/喚醒低功耗模式使得MCU無法進入深度睡眠,對于低功耗設計而言是不合理的,FreeRTOS中設計的低功耗模式------Tickless Idle Mode,可以讓MCU更長時間的處于低功耗模式
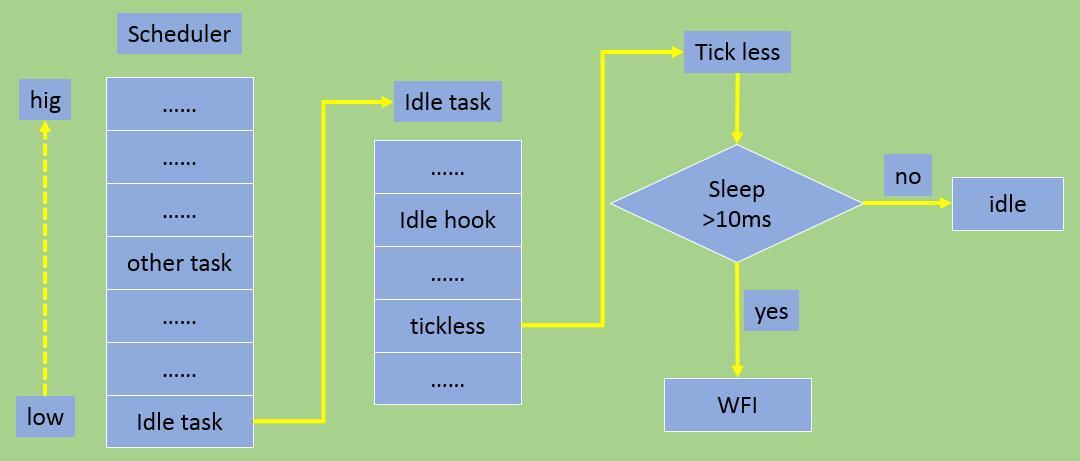
Tickless Idle Mode的設計思想在于盡可能的在MCU空閑時使其進入低功耗模式,因此需要解決以下問題:
- 合理的進入低功耗模式,避免頻繁使MCU在低功耗和運行模式下進行不必要的切換,RTOS的系統時鐘源于硬體的某個周期性定時器(Cotex-M內核多數采用SysTick),RTOS的任務調度器可以預期到下一個周期性任務(或定時器任務)的觸發時間,從而調整系統時鐘定時器中斷觸發時間,以避免RTOS進入不必要的時間中斷,從而更長時間停留在低功耗模式中,此時RTOS的時鐘不再是周期的而是動態的(在原有的時鐘基準時將不再產生中斷,即Tickless)
- 當MCU被喚醒時,通過某種方式為系統時鐘提供補償,MCU可能被動態調整過的系統時鐘中斷或突發性的外部事件所喚醒,都可以通過運行在低功耗模式下的某種定時器來計算出MCU處于低功耗模式下的時間,在MCU喚醒后對系統時間進行軟體補償
- 軟體實作時,根據具體的應用情景和MCU低功耗特性來處理問題,尤其是MCU的低功耗特性,不同MCU處于不同的低功耗模式下所能使用的外設(主要是定時器)是不同的,RTOS的系統時鐘可以進行適當的調整
2. Tickless低功耗模式實作
2.1 宏 configUSE_TICKLESS_IDLE
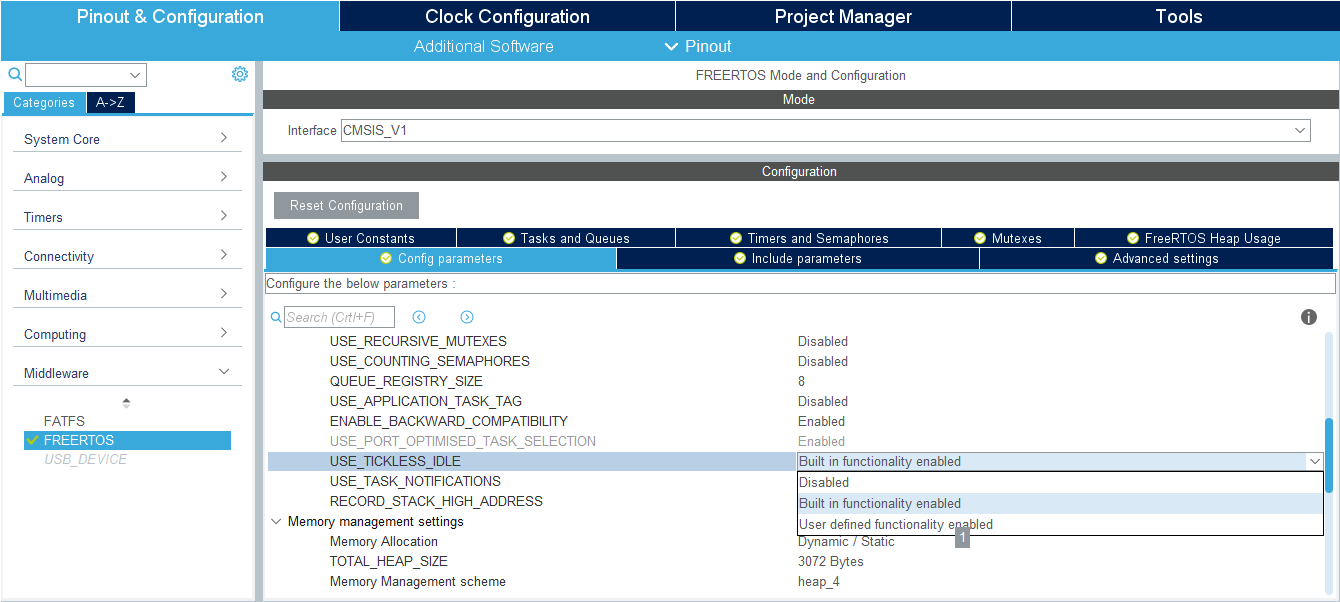
要想使用Tickless模式,必須將FreeRTOSConfig.h中的如下宏置1;FreeRTOS只提供了個別的硬體平臺模式,STM32采用模式1即可,如果采用其他模式,配置為2
#define configUSE_TICKLESS_IDLE 1 //啟用低功耗Tickless模式
2.2 宏 portSUPPRESS_TICKS_AND_SLEEP
使能了Tickless模式后,當空閑任務是唯一可運行的任務(其他任務都處于阻塞或掛起態)以及系統處于低功耗模式的時間大于configEXPECTED_IDLE_TIME_BEFORE_SLEEP個時鐘節拍時,FreeRTOS內核就會呼叫宏portSUPPRESS_TICKS_AND_SLEEP來處理低功耗相關的作業
#ifndef portSUPPRESS_TICKS_AND_SLEEP \
extern void vPortSuppressTicksAndSleep(TickType_t xExpectedIdleTime );
#define portSUPPRESS_TICKS_AND_SLEEP( xExpectedIdleTime ) \
vPortSuppressTicksAndSleep( xExpectedIdleTime )
#endif
//引數 xExpectedIdleTime 表示處理器將要在低功耗模式運行的時長
函式 vPortSuppressTicksAndSleep 是實際的低功耗執行代碼,本來需要用戶自己實作,但是針對STM32平臺,FreeRTOS已經幫我們實作了,其原始碼如下示
__weak void vPortSuppressTicksAndSleep(TickType_t xExpectedIdleTime){
uint32_t ulReloadValue,ulCompleteTickPeriods,ulCompletedSysTickDecrements, ulSysTickCTRL;
TickType_t xModifiableIdleTime;
/* 判斷系統最小時間片(systick定時器的Reload值)是否大于systick的最大裝載周期 */
if( xExpectedIdleTime > xMaximumPossibleSuppressedTicks ){
/* MCU在低功耗模式運行的時長 */
xExpectedIdleTime = xMaximumPossibleSuppressedTicks;
}
/* 關閉systick定時器 */
portNVIC_SYSTICK_CTRL_REG &= ~portNVIC_SYSTICK_ENABLE_BIT;
/* systick多載值= 當前的systick計數值+單次系統tick裝載值*(系統最小時間片-1)*/
ulReloadValue = portNVIC_SYSTICK_CURRENT_VALUE_REG + ( ulTimerCountsForOneTick * ( xExpectedIdleTime - 1UL ) );
/* 裝載值若大于補償周期,則要減去補償周期 */
if( ulReloadValue > ulStoppedTimerCompensation ){
ulReloadValue -= ulStoppedTimerCompensation;
}
/* 關閉中斷,雖然關閉了中斷,但可以喚醒CPU,不進行中斷處理 */
__disable_irq();
__dsb( portSY_FULL_READ_WRITE );
__isb( portSY_FULL_READ_WRITE );
/* 是否有其他任務,進入了就緒態 */
if( eTaskConfirmSleepModeStatus() == eAbortSleep ){
/* 不能進入低功耗模式,并將當前的systick計數值放到systick裝載暫存器中 */
portNVIC_SYSTICK_LOAD_REG = portNVIC_SYSTICK_CURRENT_VALUE_REG;
/* 重新啟動systick */
portNVIC_SYSTICK_CTRL_REG |= portNVIC_SYSTICK_ENABLE_BIT;
/* 重新賦值裝載暫存器值為一個系統的tick周期. */
portNVIC_SYSTICK_LOAD_REG = ulTimerCountsForOneTick - 1UL;
/* 開啟中斷 */
__enable_irq();
}
else{
/* 可以進入低功耗模式,裝載休眠systick裝載值 */
portNVIC_SYSTICK_LOAD_REG = ulReloadValue;
/* 清除systick當前計數值 */
portNVIC_SYSTICK_CURRENT_VALUE_REG = 0UL;
/* 啟動systick定時器*/
portNVIC_SYSTICK_CTRL_REG |= portNVIC_SYSTICK_ENABLE_BIT;
xModifiableIdleTime = xExpectedIdleTime;
/* 進入低功耗前要處理的事情,需要用戶實作休眠處理,以進一步降低功耗 */
configPRE_SLEEP_PROCESSING( &xModifiableIdleTime );
if( xModifiableIdleTime > 0 ){
/* 讓CPU休眠 */
__dsb( portSY_FULL_READ_WRITE );
__wfi();
__isb( portSY_FULL_READ_WRITE );
}
/* 退出低功耗后要處理的事情,需要用戶實作 */
configPOST_SLEEP_PROCESSING( &xExpectedIdleTime );
/* 停止systick定時器 */
ulSysTickCTRL = portNVIC_SYSTICK_CTRL_REG;
portNVIC_SYSTICK_CTRL_REG = ( ulSysTickCTRL & ~portNVIC_SYSTICK_ENABLE_BIT );
/* 使能中斷 */
__enable_irq();
/* 判斷是由外部中斷還是systick定時器計時時間到喚醒的 */
if( ( ulSysTickCTRL & portNVIC_SYSTICK_COUNT_FLAG_BIT ) != 0 ){//systick喚醒的
uint32_t ulCalculatedLoadValue;
/*systick恢復值= 單個tick周期值- (休眠裝載值-當前systick計數值)*/
ulCalculatedLoadValue = ( ulTimerCountsForOneTick - 1UL ) - ( ulReloadValue - portNVIC_SYSTICK_CURRENT_VALUE_REG );
/* 保護處理:裝載值很小或大,都賦值為1個tick周期 */
if( ( ulCalculatedLoadValue < ulStoppedTimerCompensation ) || ( ulCalculatedLoadValue > ulTimerCountsForOneTick ) ){
ulCalculatedLoadValue = ( ulTimerCountsForOneTick - 1UL );
}
/* 裝載恢復systick裝載值 */
portNVIC_SYSTICK_LOAD_REG = ulCalculatedLoadValue;
/* 休眠周期的補償值,單位為tick */
ulCompleteTickPeriods = xExpectedIdleTime - 1UL;
}
else{//外部中斷喚醒的,需進行時間補償
/* 休眠運行裝載值= 休眠裝載值-當前systick計數值)*/
ulCompletedSysTickDecrements = ( xExpectedIdleTime * ulTimerCountsForOneTick ) - portNVIC_SYSTICK_CURRENT_VALUE_REG;
/* 休眠運行周期,單位為tick值 */
ulCompleteTickPeriods = ulCompletedSysTickDecrements / ulTimerCountsForOneTick;
/* 裝載恢復systick裝載值 */
portNVIC_SYSTICK_LOAD_REG = ( ( ulCompleteTickPeriods + 1UL ) * ulTimerCountsForOneTick ) - ulCompletedSysTickDecrements;
}
/* 清除systick計數值,重啟systick定時器,恢復systick周期為1個tick值 */
portNVIC_SYSTICK_CURRENT_VALUE_REG = 0UL;
portENTER_CRITICAL();
{
portNVIC_SYSTICK_CTRL_REG |= portNVIC_SYSTICK_ENABLE_BIT;
vTaskStepTick( ulCompleteTickPeriods );//補償系統時鐘
portNVIC_SYSTICK_LOAD_REG = ulTimerCountsForOneTick - 1UL;
}
portEXIT_CRITICAL();
}
}
2.3 宏 configPRE_SLEEP_PROCESSING() 和 configPOST_SLEEP_PROCESSING()
在低功耗設計中不僅是將處理器設定到低功耗模式就行了,有時還需要做一些其他處理,比如將處理器降低到合適的頻率、修改時鐘源(切換到內部時鐘源)、關閉外設時鐘以及關閉其他功能模塊電源等
#if configUSE_TICKLESS_IDLE == 1
#define configPRE_SLEEP_PROCESSING PreSleepProcessing//進入低功耗前要處理的事情
#define configPOST_SLEEP_PROCESSING PostSleepProcessing//退出低功耗后要處理的事情
#endif /* configUSE_TICKLESS_IDLE == 1 */
弱符號函式PreSleepProcessing和PostSleepProcessing需要用戶自已根據需要撰寫
2.4 宏configEXPECTED_IDLE_TIME_BEFORE_SLEEP
處理器作業在低功耗模式的時間沒有任何限制,可以等于1個時鐘節拍,但是時間太短的話就沒有意義,比如1個時鐘節拍,剛進入低功耗模式就要退出低功耗模式,因此需要對作業在低功耗模式的時間加一個限制,宏configEXPECTED_IDLE_TIME_BEFORE_SLEEP就是用來完成此功能的
默認情況下此宏設定為2個時鐘節拍,且最小不能小于2個時鐘節拍
#ifndef configEXPECTED_IDLE_TIME_BEFORE_SLEEP
#define configEXPECTED_IDLE_TIME_BEFORE_SLEEP 2
#endif
#if configEXPECTED_IDLE_TIME_BEFORE_SLEEP < 2
#error configEXPECTED_IDLE_TIME_BEFORE_SLEEP must not be less than 2
#endif
3. Tickless低功耗模式實體
本實體介紹如何使用FreeRTOS的低功耗Tickless模式,本例程是在二值信號量例程的基礎上增加了低功耗模式
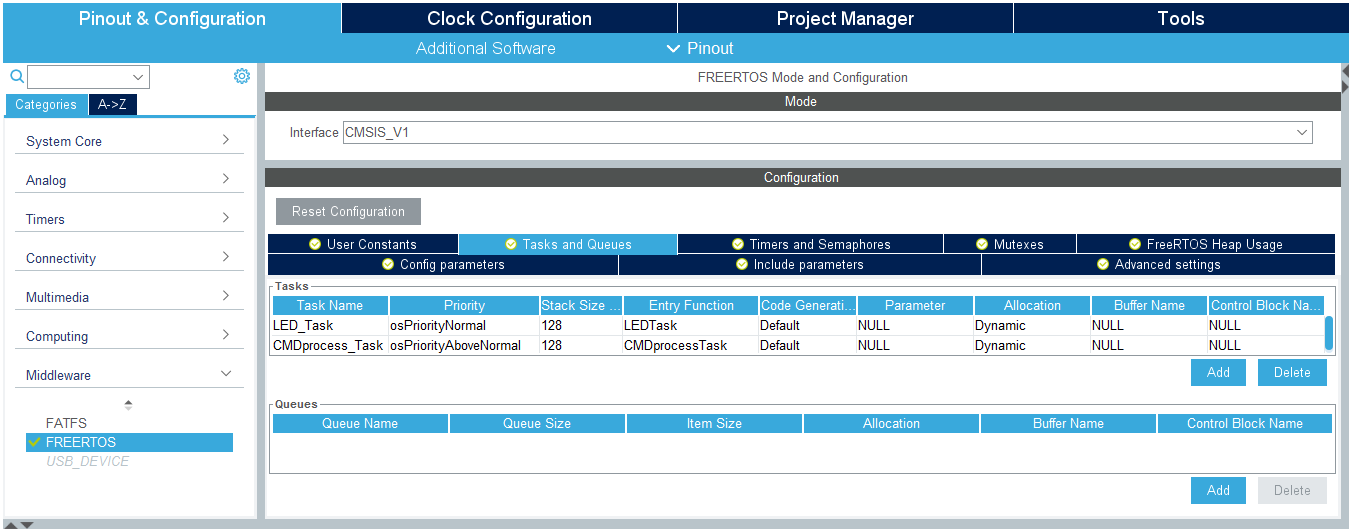
使用STM32CubeMX將FreeRTOS移植到工程中,創建兩個任務、一個二值信號量,開啟串口中斷,
LED_Task:閃爍LED1,提示系統運行正常
CMDprocess_Task:根據串口收到的指令,控制不同的LED2/LED3的亮滅
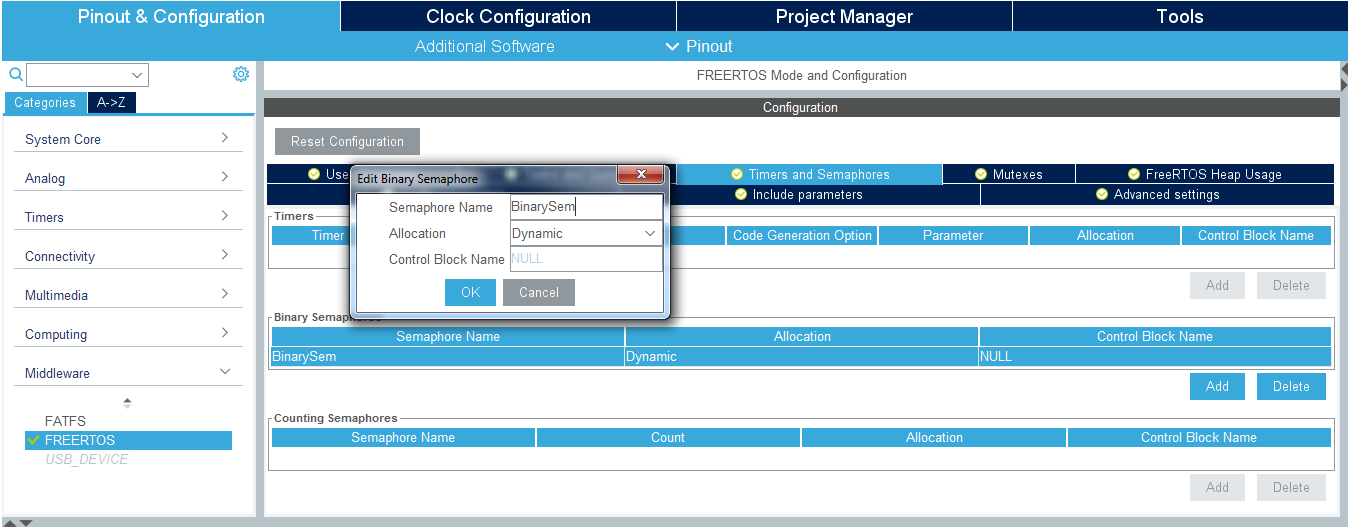
二值信號量:用于串口中斷和CMDprocess_Task任務間的同步
3.1 STM32CubeMX設定
- RCC設定外接HSE,時鐘設定為72M
- PC0/PC1/PC2設定為GPIO推挽輸出模式、上拉、高速、默認輸出電平為高電平
- USART1選擇為異步通訊方式,波特率設定為115200Bits/s,傳輸資料長度為8Bit,無奇偶校驗,1位停止位;開啟串口中斷
- 激活FreeRTOS,添加任務,設定任務名稱、優先級、堆疊大小、函式名稱等引數
- 動態創建二值信號量
- 啟用低功耗Tickless模式
- 使用FreeRTOS作業系統,需要將HAL庫的Timebase Source從SysTick改為其他定時器,選好定時器后,系統會自動配置TIM
- 輸入工程名,選擇路徑(不要有中文),選擇MDK-ARM V5;勾選Generated periphera initialization as a pair of ‘.c/.h’ files per IP ;點擊GENERATE CODE,生成工程代碼
3.2 MDK-ARM軟體編程
- 添加低功耗相關函式
__weak void PreSleepProcessing(uint32_t *ulExpectedIdleTime){
__HAL_RCC_GPIOB_CLK_DISABLE();
__HAL_RCC_GPIOC_CLK_DISABLE();
__HAL_RCC_GPIOD_CLK_DISABLE();
__HAL_RCC_GPIOE_CLK_DISABLE();
__HAL_RCC_GPIOF_CLK_DISABLE();
__HAL_RCC_GPIOG_CLK_DISABLE();
}
__weak void PostSleepProcessing(uint32_t *ulExpectedIdleTime){
__HAL_RCC_GPIOB_CLK_ENABLE();
__HAL_RCC_GPIOC_CLK_ENABLE();
__HAL_RCC_GPIOD_CLK_ENABLE();
__HAL_RCC_GPIOE_CLK_ENABLE();
__HAL_RCC_GPIOF_CLK_ENABLE();
__HAL_RCC_GPIOG_CLK_ENABLE();
}
- 添加LEDTask、CMDprocessTask任務函式代碼
/******************LEDTask**************************/
void LEDTask(void const * argument){
for(;;){
HAL_GPIO_TogglePin(GPIOC,GPIO_PIN_0);
osDelay(500);
}
}
/******************CMDprocessTask*******************/
void CMDprocessTask(void const * argument){
BaseType_t err = pdFALSE;
for(;;){
if(BinarySemHandle != 0){
err = xSemaphoreTake(BinarySemHandle,portMAX_DELAY);
if(err == pdPASS){
printf("CMDprocessTask take the binary Semaphore!\r\n");
printf("Received CMD is:");
for(int i =0;i<8;i++)
printf("%c",RxBuff[i]);
printf("\n");
if(strncmp((char *)RxBuff,"LED2on",6) == 0)
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_1,GPIO_PIN_RESET);
else if(strncmp((char *)RxBuff,"LED2off",6) == 0)
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_1,GPIO_PIN_SET);
else if(strncmp((char *)RxBuff,"LED3on",6) == 0)
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_2,GPIO_PIN_RESET);
else if(strncmp((char *)RxBuff,"LED3off",6) == 0)
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_2,GPIO_PIN_SET);
else
printf("invalid CMD,please input LED2on LED2off LED3on or LED3off\r\n");
}
else
osDelay(10);
}
}
}
- 添加串口中斷回呼函式:串口接收完命令后釋放二值信號量
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart){
RxBuff[Rx_Count++]=RxByte;
if((RxByte==0x0A)&&(BinarySemHandle!=0)){
xSemaphoreGiveFromISR(BinarySemHandle,NULL);
printf("Semaphore Give FromISR succesed!\r\n");
Rx_Count=0;
}
if(Rx_Count > 8){
printf("Wrong CMD, Please Check...!\r\n");
memset(RxBuff,0,sizeof(RxBuff));
Rx_Count=0;
}
while(HAL_UART_Receive_IT(&huart1,&RxByte,1)==HAL_OK);
}
- 在main.c中開啟串口接收中斷
int main(void){
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_USART1_UART_Init();
/* USER CODE BEGIN 2 */
printf("BinarySemaphore test....\r\n");
if(HAL_OK == HAL_UART_Receive_IT(&huart1,&RxByte,1))
printf("UART_Receive_IT successed!\r\n");
else
printf("UART_Receive_IT failed!\r\n");
/* USER CODE END 2 */
MX_FREERTOS_Init();
osKernelStart();
while (1)
{
}
}
3.3 下載驗證
編譯無誤下載到開發板后,打開串口除錯助手,通過串口命令可以控制LED2/LED3的亮滅
使用USB電流計可以觀察到開啟了Tickless模式后,系統的作業電流會有所降低

關注我的公眾號,在公眾號里發如下訊息,即可獲取相應的工程源代碼:
FreeRTOS低功耗管理實體
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/279663.html
標籤:其他