羅斯—霍爾維茨判據
文章目錄
- **羅斯—霍爾維茨判據**
- 前言
- 問題引入
- 系統特征方程
- 羅斯陣串列
- 羅斯判據
- 羅斯陣串列第一列元素有負數
- 羅斯陣串列中第一列元素出現零但不全為零
- 羅斯表中某一行元素全為零
- 總結
前言
當我們設計出一個信號處理系統后,我們需要對它進行穩定性的判斷,什么是系統的穩定性呢?通俗點來說就是我們對系統輸入一個信號,一段時間后停止輸入信號后,系統的輸出信號也會停止,如果還有信號輸出,那么這個系統就是一個不穩定的系統,當然我們也有傳統的方法去判斷,那就是對系統的沖擊回應函式的絕對值進行積分,如果積分為一個常數(也就是小于∞),就說明這是一個線性系統,但如果這是一個二階或者更高階的系統呢?那這個分析方法將變得非常復雜,顯然這不是一個好的方法,于是,我們就用拉普拉斯變換把系統從時域變換到頻域進行分析,怎么分析呢?這就是我們今天的主題:羅斯—霍爾維茨判據,(以上說法是基于這是一個線性時不變系統)
問題引入

如圖所示,我們把這個電路看成一個系統,Us(s)為系統輸入 ,Y(s)為輸出,對a點列節點方程:(1/(sL+R_1 )+ sC+1/R_3 )Y_s=(U_S (s))/(sL+R_1 )(我們假設這是一個零狀態回應系統)
令
N(s)=1/(sL+R_1)
D(s)=1/(sL+R_1)+sC+1/R_3
為了統一符號,我們把U_s(S)寫成F(s)
于是Y(s)=N(s)/D(s)×F(s)
這就是系統方程,如果我們要判斷這個系統是否穩定,就判斷D(s)是否為零,因為如果D(s)=0,那么Y(s)將趨于無窮大
系統特征方程
我們把D(s)稱為系統的特征方程,因為它決定了系統的極點,

令D(s)=0,就形成了倍訓
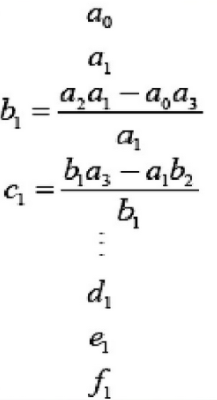
羅斯陣串列
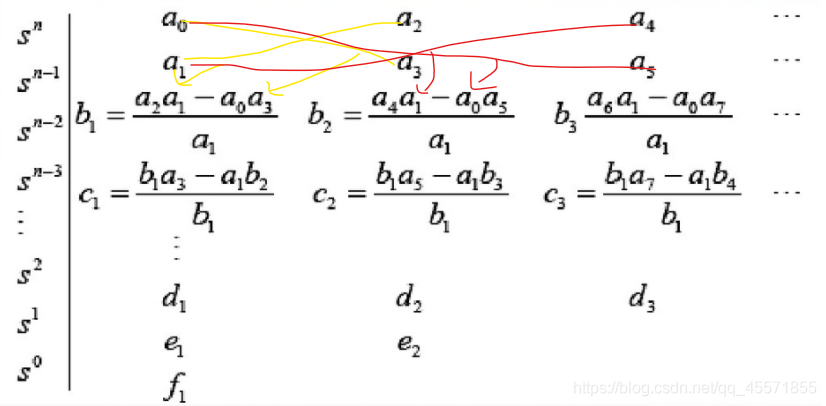
如圖,規律已經畫到圖上了,大家可以根據規律來記憶,
羅斯判據
系統穩定的充分必要條件
1、系統倍訓特征方程各項系數均為正,也就是a(0),a(1),a(2)…全部為正,
2、系統的羅斯陣串列的第一列各元素均為正,
羅斯陣串列第一列元素有負數
此時,羅斯陣串列第一列元素改變的次數就等于特征方程實部為正的實根的個數,也就是系統函式(H(s)=N(s)/D(s))在虛軸右邊的極點個數,
例:
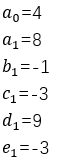
如表,第一列元素改變了三次,那么特征方程實部為正的實根個數為三個,
羅斯陣串列中第一列元素出現零但不全為零
當出現這種情況時,說明特征方程具有負實數根或者純虛數根(系統函式具有在虛軸上的極點)此時系統不穩定或者臨界穩定,
判斷系統不穩定還是臨界穩定:
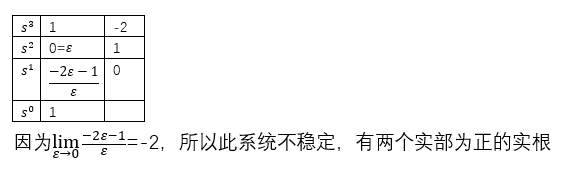
可以用一個正數ε來代替零,令ε趨近于零,然后繼續構造
運用求極限的方法,對這些元素進行符號判定,如果沒有負號,則系統臨界穩定
如果有負號,則系統不穩定,
如:設系統特征方程為:s^3-2s+1=0,判斷系統穩定性,
羅斯表:
羅斯表中某一行元素全為零
出現這種情況,說明存在著等值反號的實根或者對稱的共軛復數根,系統是不穩定或者臨界穩定的(根的實部為零),
例如:s^2-1=0
其羅斯表第二行全為零,有兩個根:1和-1,為等值反號,
判斷系統是臨界穩定還是不穩定的方法:將全零行的上一行系數和相應階次構造成多項式,然后對其進行微分,將系數填入全零行,
如例子:X(s)=s^2-1,微分得的d(X(s))/d(s)=2s,將2填入第二行,再進行判斷,
總結
拉普拉斯變換和傅里葉變換存在的意義就是使得信號分析變得更加容易,在時域里面的積分在頻域里面就是除自變數;在時域里面微分在頻域里就是乘自變數;在時域里卷積,在頻域里就是相乘,
羅斯—霍爾維茨判據就是在頻域里進行系統的穩定性判斷的方法,它要比在時域里判斷的方法簡單得多(當然,是相對的,它更加適合處理高階微分的系統)這個方法也運用了很多常見的數學方法和思想,比如極限思想和行列式,
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/279989.html
標籤:其他
上一篇:好一個指標
下一篇:影像拼接