HD01高功率驅動高速小車
- HD01雙H橋高功率賽車驅動板
- 驅動引數
- 引腳分配
- 引腳性能
- STM32驅動代碼
- 初始化代碼
- 電機控制代碼
- 控制頻率引數
HD01雙H橋高功率賽車驅動板
HD01高功率驅動高速小車
高功率驅動板主要提供車的速度
雖然方向上有些偏差,但后續可以通過 硬體加編碼器 軟體PID演算法解決小車差速問題
驅動引數
先看看我們驅動的引數
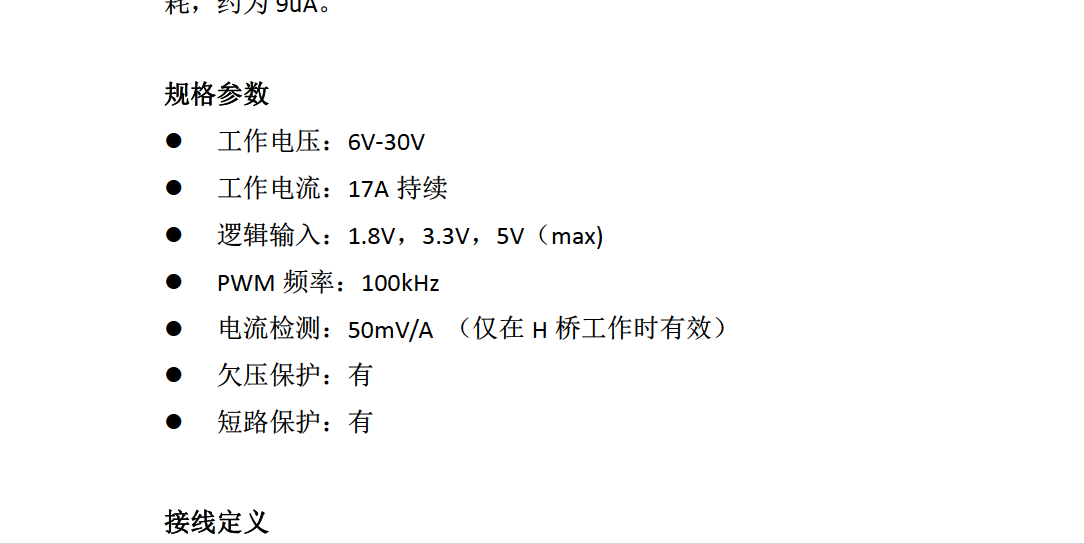
一般情況下驅動電流決定了小車的速度
驅動17A 完全碾壓L298N
這里推薦新手如果不是缺錢的話 最好買一個好點車模 和驅動
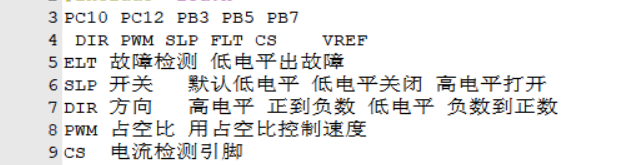
引腳分配
然后我們看他的操作引腳
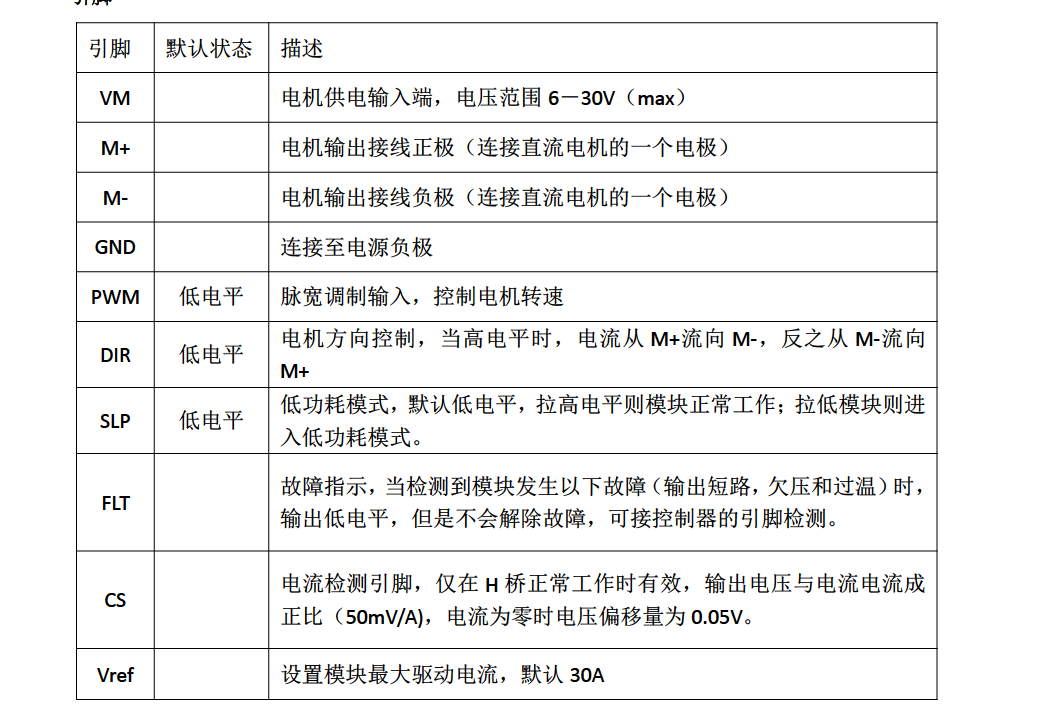
引腳性能
-
VM GND M+ M- 這個沒什么好說的
-
DIR控制方向
-
SLP控制開關
-
PWM控制速度
-
而FLP CS 作為檢測
-
可以用讀取IO口作為FLP的狀態讀取 就和按鍵差不多
-
用ADC采集樣本
-
首先我們分配引腳
STM32驅動代碼
- 然后我們根據我們要寫的功能寫一個基本控制的初始化
初始化代碼
#include "motor_control.h"
#include "led.h"
uint16_t PrescalerValue = 0; //20ms
void Montor_Init(void)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1, ENABLE);
/* GPIOA and GPIOB clock enable */
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_AFIO, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB|RCC_APB2Periph_GPIOC, ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
if(GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_5)==0)LED_warning(); //ELT ?áè?1ê?? PB5
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_7;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB ,&GPIO_InitStructure);
GPIO_ResetBits(GPIOB,GPIO_Pin_7); //PB7 CS μ??12a?ù
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_SetBits(GPIOB,GPIO_Pin_3); //PB3 SLP ??μ???′ò?a
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOC, &GPIO_InitStructure);
GPIO_SetBits(GPIOC,GPIO_Pin_10); //PC10 DIR ??μ???′ó?yμ??oêy
/* System Clocks Configuration */
/* TIM3 clock enable */
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);
/* GPIOA and GPIOB clock enable */
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_AFIO, ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4, ENABLE);
/* GPIOA and GPIOB clock enable */
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB | RCC_APB2Periph_AFIO, ENABLE);
/* GPIO Configuration */
/*GPIOB Configuration: TIM3 channel1, 2, 3 and 4 */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
}
電機控制代碼
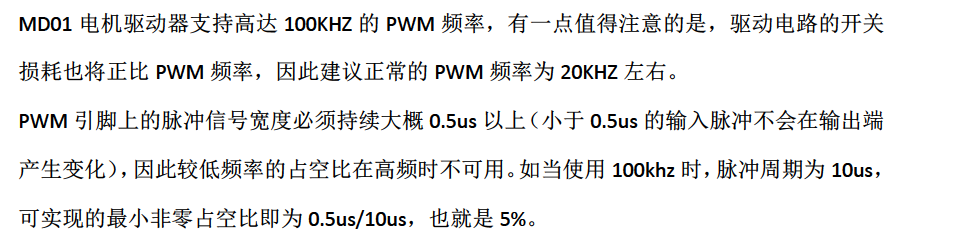
然后再撰寫一下PWM模塊 PWM有兩組 一組是舵機控制
采用的20ms 周期
一種是電機控制 他們推薦我們使用的20KHZ
控制頻率引數
代碼如下
#include "mypwm.h"
uint16_t DUOJI =62;//0-125
uint16_t TIAOSU =62;
void TIM3_PWM_Init(void)
{
uint16_t PrescalerValue = 0;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
/* System Clocks Configuration */
/* TIM3 clock enable */
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);
/* GPIOA and GPIOB clock enable */
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_AFIO, ENABLE);
/* GPIO Configuration */
/*GPIOB Configuration: TIM3 channel1, 2, 3 and 4 */ \
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_7;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
/* -----------------------------------------------------------------------
TIM3 Configuration: generate 4 PWM signals with 4 different duty cycles:
The TIM3CLK frequency is set to SystemCoreClock (Hz), to get TIM3 counter
clock at 24 MHz the Prescaler is computed as following:
- Prescaler = (TIM3CLK / TIM3 counter clock) - 1
SystemCoreClock is set to 72 MHz for Low-density, Medium-density, High-density
and Connectivity line devices and to 24 MHz for Low-Density Value line and
Medium-Density Value line devices
The TIM3 is running at 36 KHz: TIM3 Frequency = TIM3 counter clock/(ARR + 1)
= 24 MHz / 666 = 36 KHz
TIM3 Channel1 duty cycle = (TIM3_CCR1/ TIM3_ARR)* 100 = 50%
TIM3 Channel2 duty cycle = (TIM3_CCR2/ TIM3_ARR)* 100 = 37.5%
TIM3 Channel3 duty cycle = (TIM3_CCR3/ TIM3_ARR)* 100 = 25%
TIM3 Channel4 duty cycle = (TIM3_CCR4/ TIM3_ARR)* 100 = 12.5%
----------------------------------------------------------------------- */
/* Compute the prescaler value */
PrescalerValue = (uint16_t) (SystemCoreClock / 24000000) - 1;
/* Time base configuration */
TIM_TimeBaseStructure.TIM_Period = 125;
TIM_TimeBaseStructure.TIM_Prescaler = PrescalerValue;
TIM_TimeBaseStructure.TIM_ClockDivision = 0;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure);
/* PWM1 Mode configuration: Channel1 */
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_Pulse = TIAOSU;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OC2Init(TIM3, &TIM_OCInitStructure);
TIM_OC2PreloadConfig(TIM3, TIM_OCPreload_Enable);
TIM_ARRPreloadConfig(TIM3, ENABLE);
/* TIM3 enable counter */
TIM_Cmd(TIM3, ENABLE);
}
void TIM2_PWM_Init(void)
{
uint16_t PrescalerValue = 0;
uint16_t CCR1_Val = 400;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
/* System Clocks Configuration */
/* TIM3 clock enable */
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
/* GPIOA and GPIOB clock enable */
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_AFIO, ENABLE);
/* GPIO Configuration */
/*GPIOB Configuration: TIM3 channel1, 2, 3 and 4 */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
/* -----------------------------------------------------------------------
TIM3 Configuration: generate 4 PWM signals with 4 different duty cycles:
The TIM3CLK frequency is set to SystemCoreClock (Hz), to get TIM3 counter
clock at 24 MHz the Prescaler is computed as following:
- Prescaler = (TIM3CLK / TIM3 counter clock) - 1
SystemCoreClock is set to 72 MHz for Low-density, Medium-density, High-density
and Connectivity line devices and to 24 MHz for Low-Density Value line and
Medium-Density Value line devices
The TIM3 is running at 36 KHz: TIM3 Frequency = TIM3 counter clock/(ARR + 1)
= 24 MHz / 666 = 36 KHz
TIM3 Channel1 duty cycle = (TIM3_CCR1/ TIM3_ARR)* 100 = 50%
TIM3 Channel2 duty cycle = (TIM3_CCR2/ TIM3_ARR)* 100 = 37.5%
TIM3 Channel3 duty cycle = (TIM3_CCR3/ TIM3_ARR)* 100 = 25%
TIM3 Channel4 duty cycle = (TIM3_CCR4/ TIM3_ARR)* 100 = 12.5%
----------------------------------------------------------------------- */
/* Compute the prescaler value */
PrescalerValue = (uint16_t) (SystemCoreClock / 24000000) - 1;
/* Time base configuration */
TIM_TimeBaseStructure.TIM_Period = 125;
TIM_TimeBaseStructure.TIM_Prescaler = PrescalerValue;
TIM_TimeBaseStructure.TIM_ClockDivision = 0;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure);
/* PWM1 Mode configuration: Channel1 */
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_Pulse = DUOJI ;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OC2Init(TIM2, &TIM_OCInitStructure);
TIM_OC2PreloadConfig(TIM2, TIM_OCPreload_Enable);
TIM_ARRPreloadConfig(TIM2, ENABLE);
/* TIM3 enable counter */
TIM_Cmd(TIM2, ENABLE);
}
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/282375.html
標籤:其他
上一篇:stm32f072制作CAN配接器1--USB轉CAN
下一篇:STM32F103五分鐘入門系列(二)GPIO的七大暫存器+GPIOx_LCKR作用和配置(全網找不到【狗頭】)